Image Warping. Srikumar Ramalingam School of Computing University of Utah. [Slides borrowed from Ross Whitaker] 1
|
|
|
- Ashlynn Morris
- 6 years ago
- Views:
Transcription
1 Image Warping Srikumar Ramalingam School of Computing University of Utah [Slides borrowed from Ross Whitaker] 1



2 Geom Trans: Distortion From Optics Barrel Distortion Pincushion Distortion Straight lines bulge out as in a barrel Corners of points form elongated points as in a cushion 2


3 Geom Trans: Distortion From Optics Barrel Distortion Pincushion Distortion 3

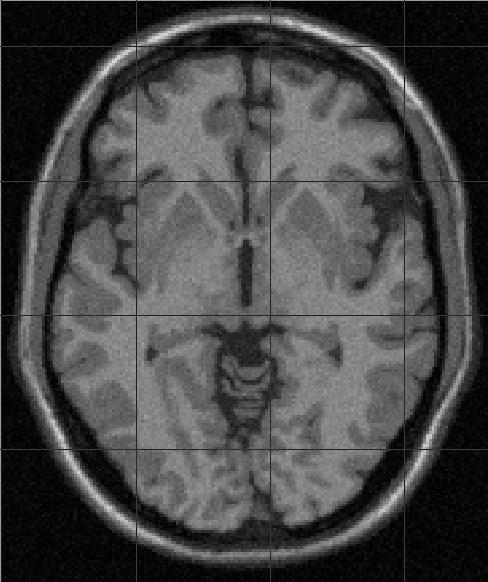
4 Geom. Trans.: Brain Template/Atlas 4
5 Warping Application: Lens Distortion Radial transformation lenses are generally circularly symmetric - Optical center is known 5
6 Warping application Lens r = xҧ i = xҧ xҧ i Distortion x, ҧ x ҧ optical centers xҧ i (1 + k 1 r 2 + k 2 r 4 + k 3 r 6 + ) xҧ r xҧ i x ҧ xҧ i Not all warps are radially symmetric how do we handle more general warps? 6
7 Specifying Warps Another Strategy Let the # DOFs (unknown parameters to compute) in the warp equal to the # of control points (i.e., point correspondences) Interpolate with some grid-based interpolation E.g. binlinear, splines xҧ i xҧ i 7
8 Landmarks Not On Grid Landmark positions driven by application Interpolate transformation at unorganized correspondences Scattered data interpolation How do we do scattered data interpolation? Idea: use kernels! Radial basis functions Radially symmetric functions of distance to landmark 8
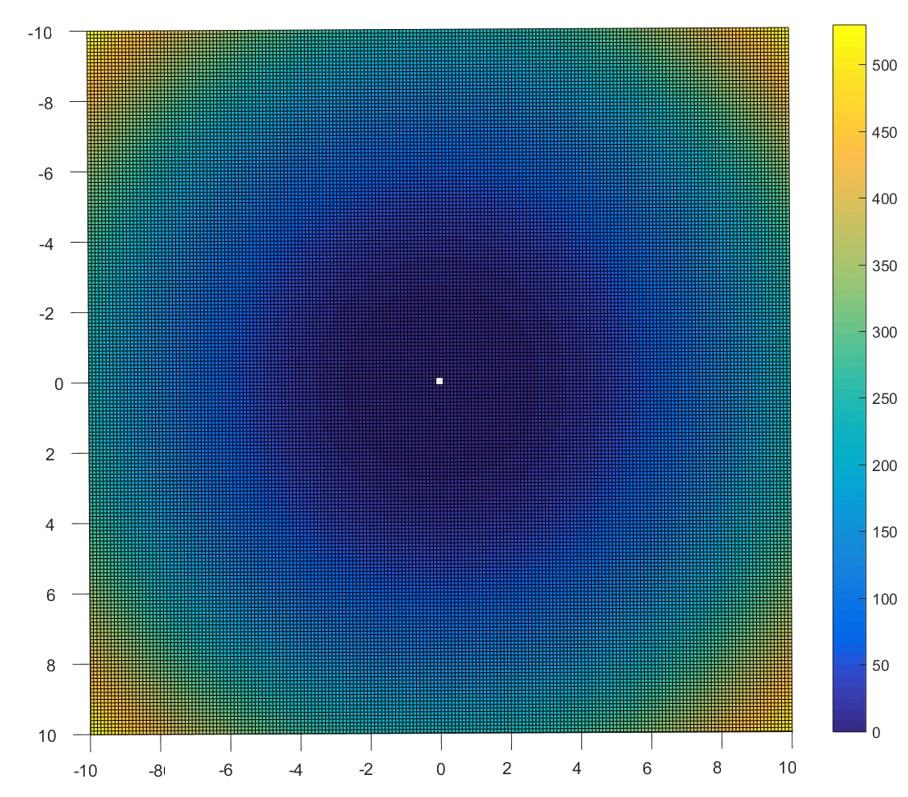
9 ҧ Gaussian Examples of RBFs x - center of distortion, or control point ε constant, xҧ i point near the control point φ i Inverse quadratic φ i x ҧ = Polyharmonic spline x ҧ = e ε 1 x ҧ xҧ i ε xҧ xҧ 2 i xҧ 2 xҧ N xҧ x 1 ҧ 9
10 RBFs Formulation Represent function f as weighted sum of basis functions Sum of radial basis functions We are given the vectors x, ҧ ҧ x 1,, xҧ N. Basis functions centered at positions of data Our goal is to compute the N unknown parameters k 1,, k N. We are given the function values f for several points. 10
11 ҧ ҧ ҧ RBFs Formulation We are given several point correspondences between two images as shown by { x 1 ҧ, x 1 ҧ,, x N, xҧ N }. Need interpolation for vector-valued function, T: x = T x y = T y x = x = N i=1 N i=1 k x i φ i ( x) ҧ k y i φ i ( x) ҧ 11
12 ҧ ҧ Solve for parameters (k s) With Landmarks as Constraints We have a total of 2N unknowns x = T x y = T y x = x = i=1 N Rewriting it in the matrix form: N i=1 k x i φ i ( x) ҧ k y i φ i ( x) ҧ 12
13 Issue: RBFs Do Not Easily Model Linear Trends Example : Assume that we are given function values for several 1D points { x 1, f 1,, x N, f N }. f(x) f 3 f 2 f 1 x x 1 x 2 x 3 13
14 RBFs Formulation with additional Linear Terms Represent f as weighted sum of basis functions and linear part Linear part of transformation Sum of radial basis functions Basis functions centered at positions of data Original N RBF terms 3 linear terms per coordinate 14
15 RBFs Formulation with additional Linear Terms Represent f as weighted sum of basis functions and linear part Linear part of transformation Sum of radial basis functions Basis functions centered at positions of data Need interpolation for vector-valued function, T: We have N point correspondences and 2N+6 unknowns. How do we solve for unknown parameters k s and p s? 15
16 RBFs Solution Strategy Find the k s and p s so that f() fits at data points The k s can have no linear trend (force it into the p s) Constraints -> linear system Correspondences must match Keep linear part separate from deformation N N N N k x i x i = 0 k x i y i = 0 k y i x i = 0 k y i y i = 0 i=1 i=1 i=1 i=1 16
17 RBFs Linear System We have 2N + 6 equations from N point correspondences N equations N equations N N N N 6 equations k i x x i = 0 k x i y i = 0 k y i x i = 0 k y i y i = 0 i=1 i=1 i=1 i=1 Rewriting them in matrix form: 17
18 RBFs Linear System Ax = b Solution for unknowns (2N k s and 6 p s): x = A 1 b 18


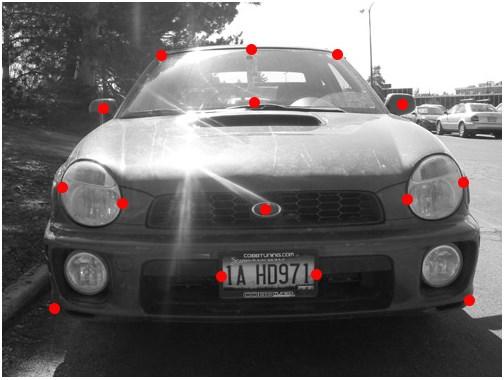
19 RBF Warp Example We are given 6 point correspondences to compute the warp parameters: 19

20 ҧ What Kernel Should We Use Gaussian Variance is free parameter controls smoothness of warp φ i x ҧ = e x ҧ 2σ 2 x i 2 s 2.5 s 2.0 s 1.5 From: Arad et al
21 RBFs Aligning faces From: Arad et al



22 RBFs Aligning Faces Mona Lisa Target Venus Source Venus Warped 22
23 RBFs Special Case: Thin Plate Splines A special class of kernels xҧ 2 xҧ N xҧ x 1 ҧ xҧ xҧ 1 23
24 Thin-plate spline 24
25 RBFs Special Case: Thin Plate Splines Minimizes the distortion function (bending energy). The name thin plate spline refers to a physical analogy involving the bending of a thin sheet of metal. 25
26 RBFs Special Case: Thin Plate Splines You can think of these functions as f(x,y) that tries to minimize the bending energy: 26
27 RBFs Special Case: Thin Plate Splines There are no free parameters that need manual tuning. It has closed-form solutions for both warping and parameter estimation. There is a physical explanation for its energy function. Produces smooth surfaces. Bookstein,

28 Monalisa Target Aligning faces Venus Source Venus Warped Venus warped + Monalisa 28

29 Image Morphing Source image Intermediate morphed image Destination image Morphing refers to a seamless transition from one image to another. This is called cross-dissolve in film industry. 29
30 Application: Image Morphing Combine shape and intensity with time parameter t = [0,1] Just blending with amounts t produces fade Use control points with interpolation in t Use {c1, c(t)} landmarks to define T1 that warps I1 to I, and {c2,c(t)} landmarks to define T2 that warps I2 to I. 30
31 Image Morphing Create from blend of two warped images I 1 I t I 2 T 1 T 2 Source image Intermediate morphed image Destination image 31
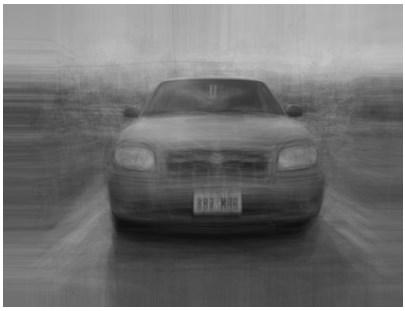
32 Application: Image Templates/Atlases Build image templates that capture statistics of class of images Accounts for shape and intensity Mean and variability Purpose Establish common coordinate system (for comparisons) Understand how a particular case compares to the general population 32
33 Templates Formulation N landmarks over M different subjects/samples Images Correspondences Mean of correspondences (template) Transformations from subjects to mean c i Ƹ = T j ( c i ҧ j ) 33



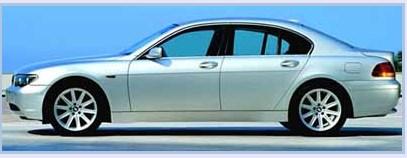

34 Cars 34

35 Car Landmarks and Warp 35


36 Car Landmarks and Warp 36

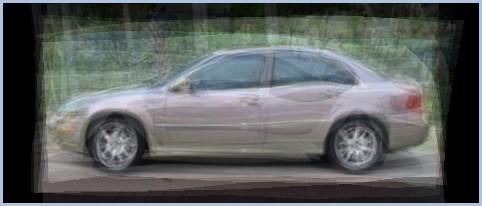
37 Car Mean 37

38 Cars 38
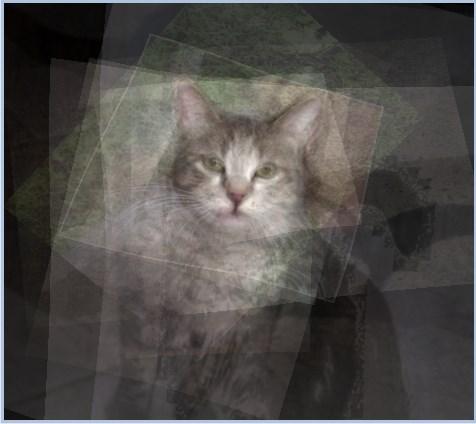





39 Cats 39
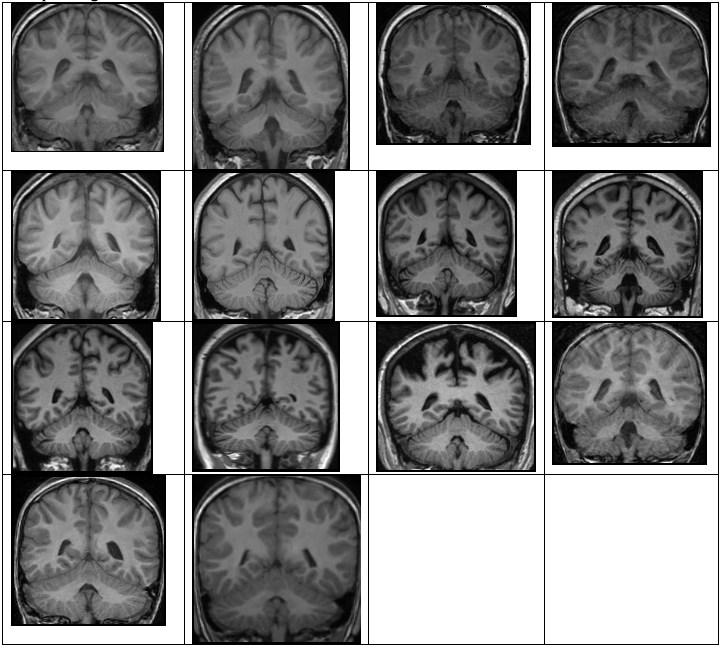
40 Brains 40

41 Brain Template 41
42 Automatic Registration of Images/Objects Within a (limited) class of transformations find the one that best matches the image E.g. find rotation, translation to optimize the correlation (or squared difference) between two images How to solve: Gradient descent Derivatives of energy with respect to transformation Includes derivatives of image Can get stuck in local minima Search E.g. brute force (all angles and translations), or be smart 42
43 Rigid Registration of Objects/Point Sets Optimize squared distance to nearest point in other set S 0 S 1 Algorithm (iterative closest point, Besl 1992) 1. For every point in S 0 find nearest point on S 1 2. Find best rigid alignment of these correspondences Closed form solution, Horn Repeat until converged 43
44 Corresponding Point Set Alignment Let M be a model point set and let S be a scene point set. Assume closest points correspond Objective function : argmin R,T N (S i RM i T i ) i=1 R rotation, T - translation
45 Aligning 2D Data Converges if starting position is close enough
Geometric Transformations and Image Warping
 Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric Transformations and Image Warping Chapter 2.6.5
 Geometric Transformations and Image Warping Chapter 2.6.5 Ross Whitaker (modified by Guido Gerig) SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2010 1 Geometric Transformations
Geometric Transformations and Image Warping Chapter 2.6.5 Ross Whitaker (modified by Guido Gerig) SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2010 1 Geometric Transformations
Geometric Transformations and Image Warping. Ross Whitaker modified by Guido Gerig SCI Institute, School of Computing University of Utah
 Geometric Transformations and Image Warping Ross Whitaker modified by Guido Gerig SCI Institute, School of Computing University of Utah 1 Geom Trans: Distortion From Optics Barrel Distortion Pincushion
Geometric Transformations and Image Warping Ross Whitaker modified by Guido Gerig SCI Institute, School of Computing University of Utah 1 Geom Trans: Distortion From Optics Barrel Distortion Pincushion
CSE 554 Lecture 7: Deformation II
 CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
Smart point landmark distribution for thin-plate splines
 Smart point landmark distribution for thin-plate splines John Lewis a, Hea-Juen Hwang a, Ulrich Neumann a, and Reyes Enciso b a Integrated Media Systems Center, University of Southern California, 3740
Smart point landmark distribution for thin-plate splines John Lewis a, Hea-Juen Hwang a, Ulrich Neumann a, and Reyes Enciso b a Integrated Media Systems Center, University of Southern California, 3740
Camera Calibration for Video See-Through Head-Mounted Display. Abstract. 1.0 Introduction. Mike Bajura July 7, 1993
 Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Camera Calibration for Video See-Through Head-Mounted Display Mike Bajura July 7, 1993 Abstract This report describes a method for computing the parameters needed to model a television camera for video
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Blacksburg, VA July 24 th 30 th, 2010 Georeferencing images and scanned maps Page 1. Georeference
 George McLeod Prepared by: With support from: NSF DUE-0903270 in partnership with: Geospatial Technician Education Through Virginia s Community Colleges (GTEVCC) Georeference The process of defining how
George McLeod Prepared by: With support from: NSF DUE-0903270 in partnership with: Geospatial Technician Education Through Virginia s Community Colleges (GTEVCC) Georeference The process of defining how
Image Registration Lecture 4: First Examples
 Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Specification and Computation of Warping and Morphing Transformations. Bruno Costa da Silva Microsoft Corp.
 Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Problem Set 4. Assigned: March 23, 2006 Due: April 17, (6.882) Belief Propagation for Segmentation
 Belief Propagation for Segmentation") 6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
Warps, Filters, and Morph Interpolation
 Warps, Filters, and Morph Interpolation Material in this presentation is largely based on/derived from slides originally by Szeliski, Seitz and Efros Brent M. Dingle, Ph.D. 2015 Game Design and Development
Warps, Filters, and Morph Interpolation Material in this presentation is largely based on/derived from slides originally by Szeliski, Seitz and Efros Brent M. Dingle, Ph.D. 2015 Game Design and Development
CPSC 340: Machine Learning and Data Mining. Regularization Fall 2016
 CPSC 340: Machine Learning and Data Mining Regularization Fall 2016 Assignment 2: Admin 2 late days to hand it in Friday, 3 for Monday. Assignment 3 is out. Due next Wednesday (so we can release solutions
CPSC 340: Machine Learning and Data Mining Regularization Fall 2016 Assignment 2: Admin 2 late days to hand it in Friday, 3 for Monday. Assignment 3 is out. Due next Wednesday (so we can release solutions
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Introduction to Computer Graphics. Modeling (3) April 27, 2017 Kenshi Takayama
 April 27, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
What will we learn? Geometric Operations. Mapping and Affine Transformations. Chapter 7 Geometric Operations
 What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 7 Geometric Operations What do geometric operations do to an image and what are they used for? What are the techniques
What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 7 Geometric Operations What do geometric operations do to an image and what are they used for? What are the techniques
Warping and Morphing. Ligang Liu Graphics&Geometric Computing Lab USTC
 Warping and Morphing Ligang Liu Graphics&Geometric Computing Lab USTC http://staff.ustc.edu.cn/~lgliu Metamorphosis "transformation of a shape and its visual attributes" Intrinsic in our environment Deformations
Warping and Morphing Ligang Liu Graphics&Geometric Computing Lab USTC http://staff.ustc.edu.cn/~lgliu Metamorphosis "transformation of a shape and its visual attributes" Intrinsic in our environment Deformations
Manual image registration in BrainVoyager QX Table of Contents
 Manual image registration in BrainVoyager QX Table of Contents Manual image registration in BrainVoyager QX......1 Performing manual alignment for functional to anatomical images......2 Step 1: preparation......2
Manual image registration in BrainVoyager QX Table of Contents Manual image registration in BrainVoyager QX......1 Performing manual alignment for functional to anatomical images......2 Step 1: preparation......2
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
fmri pre-processing Juergen Dukart
 fmri pre-processing Juergen Dukart Outline Why do we need pre-processing? fmri pre-processing Slice time correction Realignment Unwarping Coregistration Spatial normalisation Smoothing Overview fmri time-series
fmri pre-processing Juergen Dukart Outline Why do we need pre-processing? fmri pre-processing Slice time correction Realignment Unwarping Coregistration Spatial normalisation Smoothing Overview fmri time-series
Image Morphing. Application: Movie Special Effects. Application: Registration /Alignment. Image Cross-Dissolve
 Image Morphing Application: Movie Special Effects Morphing is turning one image into another (through a seamless transition) First movies with morphing Willow, 1988 Indiana Jones and the Last Crusade,
Image Morphing Application: Movie Special Effects Morphing is turning one image into another (through a seamless transition) First movies with morphing Willow, 1988 Indiana Jones and the Last Crusade,
Image Warping, mesh, and triangulation CSE399b, Spring 07 Computer Vision
 http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Non-rigid Image Registration
 Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
Image Morphing. CSC320: Introduction to Visual Computing Michael Guerzhoy. Many slides borrowed from Derek Hoeim, Alexei Efros
 Image Morphing Edvard Munch, The Scream Many slides borrowed from Derek Hoeim, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Morphing Examples Women in art http://youtube.com/watch?v=nudion-_hxs
Image Morphing Edvard Munch, The Scream Many slides borrowed from Derek Hoeim, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Morphing Examples Women in art http://youtube.com/watch?v=nudion-_hxs
Filtering Images in the Spatial Domain Chapter 3b G&W. Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah
 School of Computing University of Utah") Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Non-Rigid Image Registration III
 Non-Rigid Image Registration III CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS6240) Non-Rigid Image Registration
Non-Rigid Image Registration III CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS6240) Non-Rigid Image Registration
Model Fitting. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Model Fitting CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Model Fitting 1 / 34 Introduction Introduction Model
Model Fitting CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Model Fitting 1 / 34 Introduction Introduction Model
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Interactive Computer Graphics. Warping and morphing. Warping and Morphing. Warping and Morphing. Lecture 14+15: Warping and Morphing. What is.
 Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
COMPUTATIONAL INTELLIGENCE
 COMPUTATIONAL INTELLIGENCE Radial Basis Function Networks Adrian Horzyk Preface Radial Basis Function Networks (RBFN) are a kind of artificial neural networks that use radial basis functions (RBF) as activation
COMPUTATIONAL INTELLIGENCE Radial Basis Function Networks Adrian Horzyk Preface Radial Basis Function Networks (RBFN) are a kind of artificial neural networks that use radial basis functions (RBF) as activation
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Transformation Functions
 Transformation Functions A. Ardeshir Goshtasby 1 Introduction Transformation functions are used to describe geometric differences between two images that have the same or overlapping contents. Given the
Transformation Functions A. Ardeshir Goshtasby 1 Introduction Transformation functions are used to describe geometric differences between two images that have the same or overlapping contents. Given the
CPSC 340: Machine Learning and Data Mining. More Regularization Fall 2017
 CPSC 340: Machine Learning and Data Mining More Regularization Fall 2017 Assignment 3: Admin Out soon, due Friday of next week. Midterm: You can view your exam during instructor office hours or after class
CPSC 340: Machine Learning and Data Mining More Regularization Fall 2017 Assignment 3: Admin Out soon, due Friday of next week. Midterm: You can view your exam during instructor office hours or after class
Calibrating an Overhead Video Camera
 Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Shape Matching and Object Recognition using Low Distortion Correspondences
 Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Learning-based Neuroimage Registration
 Learning-based Neuroimage Registration Leonid Teverovskiy and Yanxi Liu 1 October 2004 CMU-CALD-04-108, CMU-RI-TR-04-59 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract
Learning-based Neuroimage Registration Leonid Teverovskiy and Yanxi Liu 1 October 2004 CMU-CALD-04-108, CMU-RI-TR-04-59 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
COMPUTATIONAL INTELLIGENCE (CS) (INTRODUCTION TO MACHINE LEARNING) SS16. Lecture 2: Linear Regression Gradient Descent Non-linear basis functions
 (INTRODUCTION TO MACHINE LEARNING) SS16. Lecture 2: Linear Regression Gradient Descent Non-linear basis functions") COMPUTATIONAL INTELLIGENCE (CS) (INTRODUCTION TO MACHINE LEARNING) SS16 Lecture 2: Linear Regression Gradient Descent Non-linear basis functions LINEAR REGRESSION MOTIVATION Why Linear Regression? Regression
COMPUTATIONAL INTELLIGENCE (CS) (INTRODUCTION TO MACHINE LEARNING) SS16 Lecture 2: Linear Regression Gradient Descent Non-linear basis functions LINEAR REGRESSION MOTIVATION Why Linear Regression? Regression
The Insight Toolkit. Image Registration Algorithms & Frameworks
 The Insight Toolkit Image Registration Algorithms & Frameworks Registration in ITK Image Registration Framework Multi Resolution Registration Framework Components PDE Based Registration FEM Based Registration
The Insight Toolkit Image Registration Algorithms & Frameworks Registration in ITK Image Registration Framework Multi Resolution Registration Framework Components PDE Based Registration FEM Based Registration
Image Registration. Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department
 Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Deformable Object Registration
 Aalto University Of Electrical Engineering AS-0.3200 Project in Automation and Systems Technology Deformable Object Registration Author: AnttiValkonen Instructor: Joni Pajarinen May 31, 2015 1 Introduction
Aalto University Of Electrical Engineering AS-0.3200 Project in Automation and Systems Technology Deformable Object Registration Author: AnttiValkonen Instructor: Joni Pajarinen May 31, 2015 1 Introduction
EECS 556 Image Processing W 09. Interpolation. Interpolation techniques B splines
 EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
EECS 556 Image Processing W 09 Interpolation Interpolation techniques B splines What is image processing? Image processing is the application of 2D signal processing methods to images Image representation
COMPUTATIONAL INTELLIGENCE (INTRODUCTION TO MACHINE LEARNING) SS18. Lecture 2: Linear Regression Gradient Descent Non-linear basis functions
 SS18. Lecture 2: Linear Regression Gradient Descent Non-linear basis functions") COMPUTATIONAL INTELLIGENCE (INTRODUCTION TO MACHINE LEARNING) SS18 Lecture 2: Linear Regression Gradient Descent Non-linear basis functions LINEAR REGRESSION MOTIVATION Why Linear Regression? Simplest
COMPUTATIONAL INTELLIGENCE (INTRODUCTION TO MACHINE LEARNING) SS18 Lecture 2: Linear Regression Gradient Descent Non-linear basis functions LINEAR REGRESSION MOTIVATION Why Linear Regression? Simplest
Image Warping and Morphing. Alexey Tikhonov : Computational Photography Alexei Efros, CMU, Fall 2007
 Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
The aim is to find an average between two objects Not an average of two images of objects but an image of the average object!
 The aim is to find an average between two objects Not an average of two images of objects but an image of the average object! How can we make a smooth transition in time? Do a weighted average over time
The aim is to find an average between two objects Not an average of two images of objects but an image of the average object! How can we make a smooth transition in time? Do a weighted average over time
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
Face Morphing. Introduction. Related Work. Alex (Yu) Li CS284: Professor Séquin December 11, 2009
 Li CS284: Professor Séquin December 11, 2009") Alex (Yu) Li CS284: Professor Séquin December 11, 2009 Face Morphing Introduction Face morphing, a specific case of geometry morphing, is a powerful tool for animation and graphics. It consists of the
Alex (Yu) Li CS284: Professor Séquin December 11, 2009 Face Morphing Introduction Face morphing, a specific case of geometry morphing, is a powerful tool for animation and graphics. It consists of the
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 7 Geometric operations What will we learn? What do geometric operations do to an image and what are they used for? What are the techniques used
Practical Image and Video Processing Using MATLAB Chapter 7 Geometric operations What will we learn? What do geometric operations do to an image and what are they used for? What are the techniques used
l ealgorithms for Image Registration
 FAIR: exib Image Registration l F l ealgorithms for Jan Modersitzki Computing And Software, McMaster University 1280 Main Street West, Hamilton On, L8S 4K1, Canada modersit@cas.mcmaster.ca August 13, 2008
FAIR: exib Image Registration l F l ealgorithms for Jan Modersitzki Computing And Software, McMaster University 1280 Main Street West, Hamilton On, L8S 4K1, Canada modersit@cas.mcmaster.ca August 13, 2008
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Image warping/morphing
 Image warping/morphing Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Tom Funkhouser and Alexei Efros Image warping Image formation B A Sampling and quantization What
Image warping/morphing Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Tom Funkhouser and Alexei Efros Image warping Image formation B A Sampling and quantization What
Image warping/morphing
 Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation
 Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Recent Developments in Model-based Derivative-free Optimization
 Recent Developments in Model-based Derivative-free Optimization Seppo Pulkkinen April 23, 2010 Introduction Problem definition The problem we are considering is a nonlinear optimization problem with constraints:
Recent Developments in Model-based Derivative-free Optimization Seppo Pulkkinen April 23, 2010 Introduction Problem definition The problem we are considering is a nonlinear optimization problem with constraints:
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Interpreter aided salt boundary segmentation using SVM regression shape deformation technique
 Interpreter aided salt boundary segmentation using SVM regression shape deformation technique Problem Introduction For the seismic imaging project in offshore oil and gas exploration, a good velocity model
Interpreter aided salt boundary segmentation using SVM regression shape deformation technique Problem Introduction For the seismic imaging project in offshore oil and gas exploration, a good velocity model
Images from 3D Creative Magazine. 3D Modelling Systems
 Images from 3D Creative Magazine 3D Modelling Systems Contents Reference & Accuracy 3D Primitives Transforms Move (Translate) Rotate Scale Mirror Align 3D Booleans Deforms Bend Taper Skew Twist Squash
Images from 3D Creative Magazine 3D Modelling Systems Contents Reference & Accuracy 3D Primitives Transforms Move (Translate) Rotate Scale Mirror Align 3D Booleans Deforms Bend Taper Skew Twist Squash
Spatial Interpolation & Geostatistics
 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 Tobler s Law All places are related, but nearby places are related more than distant places Corollary:
(Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Lag Mean Distance between pairs of points 1 Tobler s Law All places are related, but nearby places are related more than distant places Corollary:
Accurate Reconstruction by Interpolation
 Accurate Reconstruction by Interpolation Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore International Conference on Inverse Problems and Related Topics
Accurate Reconstruction by Interpolation Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore International Conference on Inverse Problems and Related Topics
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Feature-Driven Direct Non-Rigid Image Registration
 Feature-Driven Direct Non-Rigid Image Registration V. Gay-Bellile 1,2 A. Bartoli 1 P. Sayd 2 1 LASMEA, CNRS / UBP, Clermont-Ferrand, France 2 LCEI, CEA LIST, Saclay, France Vincent.Gay-Bellile@univ-bpclermont.fr
Feature-Driven Direct Non-Rigid Image Registration V. Gay-Bellile 1,2 A. Bartoli 1 P. Sayd 2 1 LASMEA, CNRS / UBP, Clermont-Ferrand, France 2 LCEI, CEA LIST, Saclay, France Vincent.Gay-Bellile@univ-bpclermont.fr
Computational Neuroanatomy
 Computational Neuroanatomy John Ashburner john@fil.ion.ucl.ac.uk Smoothing Motion Correction Between Modality Co-registration Spatial Normalisation Segmentation Morphometry Overview fmri time-series kernel
Computational Neuroanatomy John Ashburner john@fil.ion.ucl.ac.uk Smoothing Motion Correction Between Modality Co-registration Spatial Normalisation Segmentation Morphometry Overview fmri time-series kernel
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Spatial Interpolation - Geostatistics 4/3/2018
 Spatial Interpolation - Geostatistics 4/3/201 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Distance between pairs of points Lag Mean Tobler s Law All places are related, but nearby places
Spatial Interpolation - Geostatistics 4/3/201 (Z i Z j ) 2 / 2 Spatial Interpolation & Geostatistics Lag Distance between pairs of points Lag Mean Tobler s Law All places are related, but nearby places
SPM8 for Basic and Clinical Investigators. Preprocessing. fmri Preprocessing
 SPM8 for Basic and Clinical Investigators Preprocessing fmri Preprocessing Slice timing correction Geometric distortion correction Head motion correction Temporal filtering Intensity normalization Spatial
SPM8 for Basic and Clinical Investigators Preprocessing fmri Preprocessing Slice timing correction Geometric distortion correction Head motion correction Temporal filtering Intensity normalization Spatial
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
2D Image Morphing using Pixels based Color Transition Methods
 2D Image Morphing using Pixels based Color Transition Methods H.B. Kekre Senior Professor, Computer Engineering,MP STME, SVKM S NMIMS University, Mumbai,India Tanuja K. Sarode Asst.Professor, Thadomal
2D Image Morphing using Pixels based Color Transition Methods H.B. Kekre Senior Professor, Computer Engineering,MP STME, SVKM S NMIMS University, Mumbai,India Tanuja K. Sarode Asst.Professor, Thadomal
Revised Sheet Metal Simulation, J.E. Akin, Rice University
 Revised Sheet Metal Simulation, J.E. Akin, Rice University A SolidWorks simulation tutorial is just intended to illustrate where to find various icons that you would need in a real engineering analysis.
Revised Sheet Metal Simulation, J.E. Akin, Rice University A SolidWorks simulation tutorial is just intended to illustrate where to find various icons that you would need in a real engineering analysis.
Georeferencing & Spatial Adjustment
 Georeferencing & Spatial Adjustment Aligning Raster and Vector Data to the Real World Rotation Differential Scaling Distortion Skew Translation 1 The Problem How are geographically unregistered data, either
Georeferencing & Spatial Adjustment Aligning Raster and Vector Data to the Real World Rotation Differential Scaling Distortion Skew Translation 1 The Problem How are geographically unregistered data, either
Chemnitz Scientific Computing Preprints
 Roman Unger Obstacle Description with Radial Basis Functions for Contact Problems in Elasticity CSC/09-01 Chemnitz Scientific Computing Preprints Impressum: Chemnitz Scientific Computing Preprints ISSN
Roman Unger Obstacle Description with Radial Basis Functions for Contact Problems in Elasticity CSC/09-01 Chemnitz Scientific Computing Preprints Impressum: Chemnitz Scientific Computing Preprints ISSN
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Preprocessing II: Between Subjects John Ashburner
 Preprocessing II: Between Subjects John Ashburner Pre-processing Overview Statistics or whatever fmri time-series Anatomical MRI Template Smoothed Estimate Spatial Norm Motion Correct Smooth Coregister
Preprocessing II: Between Subjects John Ashburner Pre-processing Overview Statistics or whatever fmri time-series Anatomical MRI Template Smoothed Estimate Spatial Norm Motion Correct Smooth Coregister
Understanding Gridfit
 Understanding Gridfit John R. D Errico Email: woodchips@rochester.rr.com December 28, 2006 1 Introduction GRIDFIT is a surface modeling tool, fitting a surface of the form z(x, y) to scattered (or regular)
Understanding Gridfit John R. D Errico Email: woodchips@rochester.rr.com December 28, 2006 1 Introduction GRIDFIT is a surface modeling tool, fitting a surface of the form z(x, y) to scattered (or regular)
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Neue Möglichkeiten zur Visualisierung von Daten aus Optimierung, DOE-Studien und stochastischen Analysen
 Neue Möglichkeiten zur Visualisierung von Daten aus Optimierung, DOE-Studien und stochastischen Analysen Katharina Witowski kaw@dynamore.de DYNAmore GmbH Industriestraße 2 70565 Stuttgart http://www.dynamore.de
Neue Möglichkeiten zur Visualisierung von Daten aus Optimierung, DOE-Studien und stochastischen Analysen Katharina Witowski kaw@dynamore.de DYNAmore GmbH Industriestraße 2 70565 Stuttgart http://www.dynamore.de
Basic fmri Design and Analysis. Preprocessing
 Basic fmri Design and Analysis Preprocessing fmri Preprocessing Slice timing correction Geometric distortion correction Head motion correction Temporal filtering Intensity normalization Spatial filtering
Basic fmri Design and Analysis Preprocessing fmri Preprocessing Slice timing correction Geometric distortion correction Head motion correction Temporal filtering Intensity normalization Spatial filtering
CIS581: Computer Vision and Computational Photography Project 2: Face Morphing and Blending Due: Oct. 17, 2017 at 3:00 pm
 CIS581: Computer Vision and Computational Photography Project 2: Face Morphing and Blending Due: Oct. 17, 2017 at 3:00 pm Instructions This is an individual project. Individual means each student must
CIS581: Computer Vision and Computational Photography Project 2: Face Morphing and Blending Due: Oct. 17, 2017 at 3:00 pm Instructions This is an individual project. Individual means each student must
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Vectorization Using Stochastic Local Search
 Vectorization Using Stochastic Local Search Byron Knoll CPSC303, University of British Columbia March 29, 2009 Abstract: Stochastic local search can be used for the process of vectorization. In this project,
Vectorization Using Stochastic Local Search Byron Knoll CPSC303, University of British Columbia March 29, 2009 Abstract: Stochastic local search can be used for the process of vectorization. In this project,