APPLANIX PRODUCTS AND SOLUTIONS FOR MOBILE MAPPING AND POSITIONING CAPTURE EVERYTHING. POSPac MMS HYDRO 08 November 2008
|
|
|
- Evelyn Heath
- 6 years ago
- Views:
Transcription

1 APPLANIX CAPTURE EVERYTHING POSPac MMS HYDRO 08 November 2008
2 Accurate Post Processed Position & Orientation For Modern Port Survey Operations. Increasing use of sonar & laser survey equipment with sub-centimetre accuracies. Focussed attention on the georeferencing and motion compensation. Robust marine mobile mapping requires tightly integrated Global Positioning System (GPS) and Inertial Navigation System (INS) sensors. Inertial data aids in reducing GPS noise as well as providing high bandwidth, un-interrupted position and orientation in spite of GPS outages. This presentation describes the Post Processed Virtual Reference Station (PPVRS) for aided Inertial Navigation which makes use of a network of GPS reference stations to determine atmospheric biases and other errors at the rover position. The result is a continuous, high-precision position and orientation solution despite distant reference stations.



3 Survey Vessel and Equipment


4 Equipment Details RESON SeaBat 8125 Ultra-high resolution, focussed, multibeam echosounder. Delivering 240 depths/ping, 05. x 1.0 degree beamwidth up to 50Hz, 120 degree opening angle, time synchronised. Riegl Q240i Pulsed time-of-flight range measurement principle and beam scanning by means of an opto-mechanical scan mechanism, providing fully linear, unidirectional and parallel scan lines. Delivering 20mm ranging accuracy, 10,000 samples/sec, 80 degree opening angle, time synchronised.

5 Ordnance Survey Network Within 200km


6 Survey Location, north docks Liverpool, UK
7 Bathymetry Data Flow Sonar PDS2000 PDS2000 data file PDS2000 EDIT module PDS2000 data file or ASCII XYZ POS MV POS MV data Applanix POSPac MMS SBET Base Stn data
8 Laser Data Flow Laser POS AV POS AV data Applanix POSPac MMS SBET Base Stn data LAS

9 Applanix POSPac Mobile Mapping Suite POSPac MMS is a user-friendly suite of tools used to create an accurate solution of position, orientation, and dynamics from the GNSS and INS data collected. POSPac MMS provides and displays all the information necessary to analyse the navigation solution, ensuring its quality.
10 POSPac MMS Data Flow Base Station data (2) Data Extraction and Quality Control (3) Applanix SmartBase Network check & VRS generation POS MV data (1) Data Extraction and Quality Control (4) Applanix IN-Fusion Processor and Smoother SBET

11 POSPac MMS Step 1, POS MV Data Drag and drop raw POS MV files into the Plan View, or use the Import function and select the first POS file to start data import. Review the real time solution by viewing: Message Logs POS data import IMU data continuity checking GNSS continuity checking Real Time plots Or, batch process


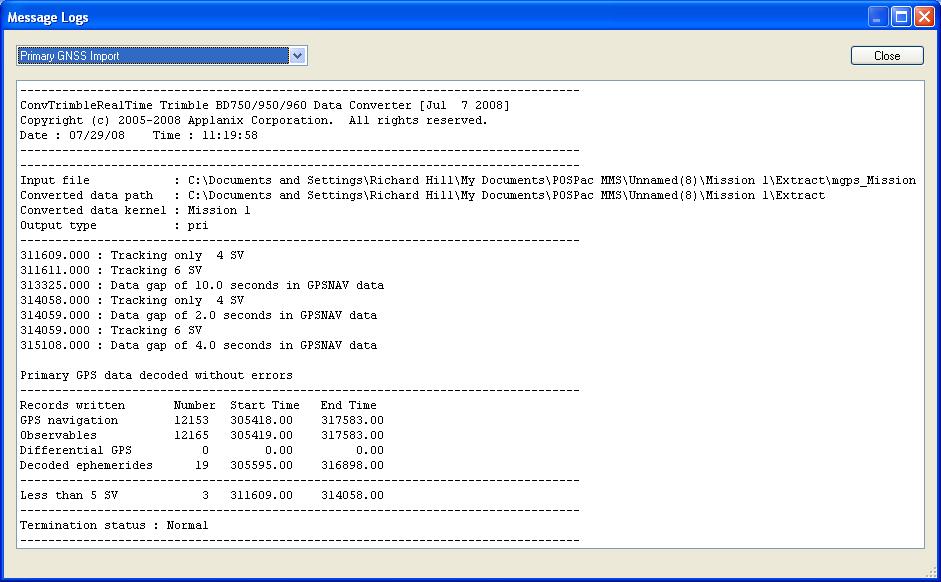
12 POSPac MMS Data Extract Results


13 POSPac MMS Step 2, Base Data Automatically search for, download, and import base station data publicly available on the internet. Or load data from your own base stations. Base station data automatically interpolated to 1 second interval. Automatically download precise and broadcast ephemeris data.

14 What Is It Post-Processed Virtual Reference Station (PPVRS) Trimble VRS technology Step 1: Network Adjustment, Step 2: VRS Generation How it works POSPac MMS Step 3, SmartBase TM Uses a network of reference stations, at least 4 required At least 18hrs of continuous data required Performs ambiguity fixed solution Spatially models ionospheric and geometric errors at base and rover locations Generates an optimal observation set for a VRS near the rover location

15 POSPac MMS SmartBase TM Results SMARTBASE Results

16 POSPac MMS Step 4, IN-Fusion TM IN-Fusion TM combines GNSS raw observables (pseudorange and phase values) with IMU data. Hence IN-Fusion TM continues to access aiding information even in the event of tracking only 1 or 2 satellites. Conversely, IMU data are continuously used to help resolve the initial ambiguities and minimise time to resolve integer ambiguities. GNSS Mode is automatically selected, based on the projects imports. Processing modes are: SmartBase TM Single Base Station Differential GNSS Precise Point Positioning Real-time GNSS Auxiliary GNSS

 with greater precision and")
17 POSPac MMS Applanix IN-Fusion TM Three, automated, processing steps: Forward Backward Combined Generates a Smoothed Best Estimate of Trajectory (SBET) with greater precision and reliability.
18 POSPac MMS Step 5, Review Results To ensure a quality solution, review: Message Logs GNSS-Inertial Forward Processing GNSS-Inertial Backward Processing GNSS-Inertial Combined Processing Plots Smoothed Performance Metrics Calibrated Installation Parameters Solution Status Forward Processed Estimated Errors Pass SBET file to post processing suite.. Replace realtime position and orientation solution with SBET data

19 POSPac MMS Step 6, Import SBET

20 POSPac MMS Results
21 POSPac Different Processing Methods Single base station, 30km VRS, distant. between 100 and Precise 130km Point distant. Positioning.

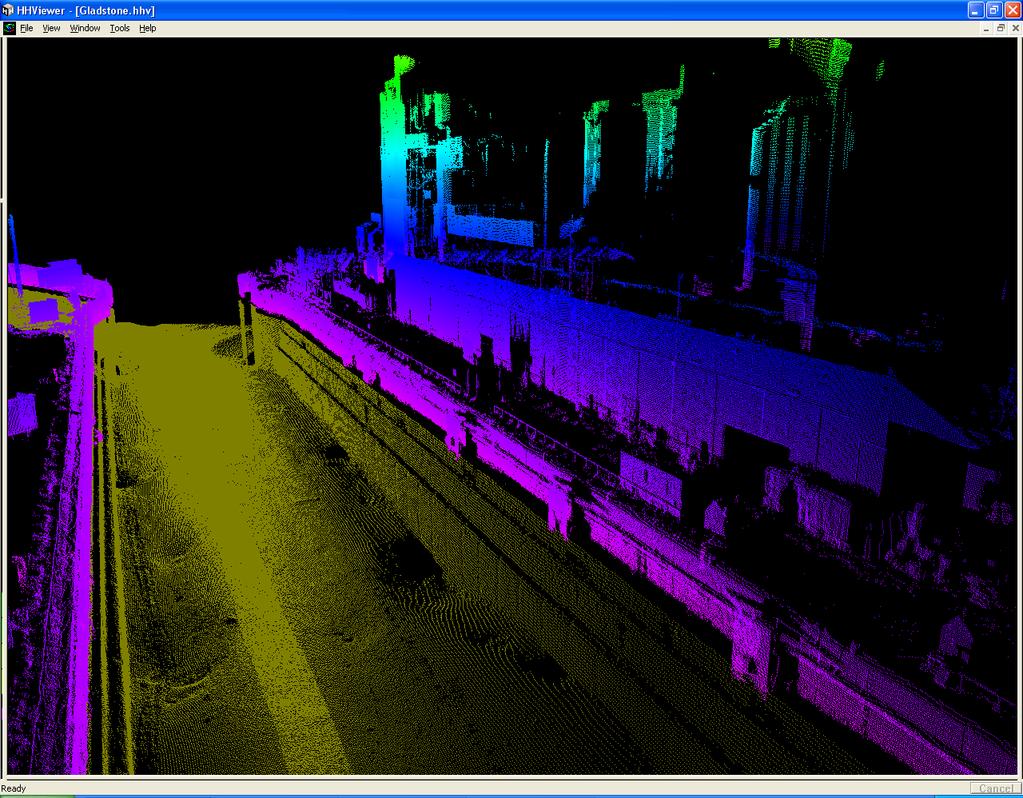
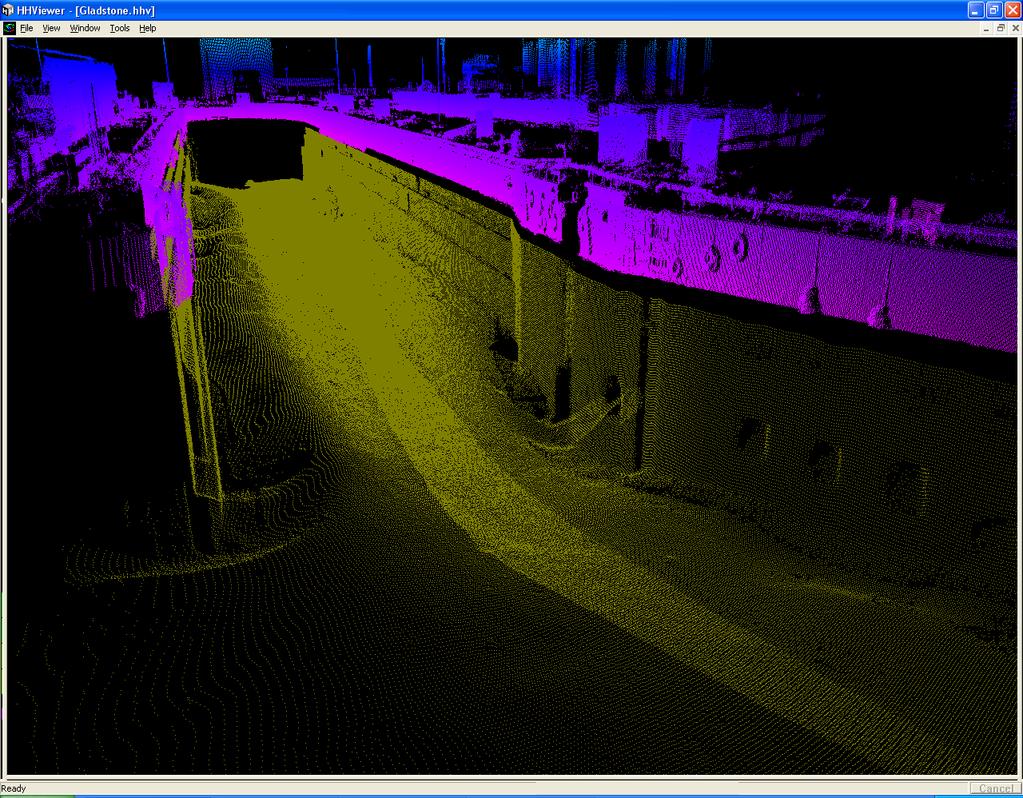
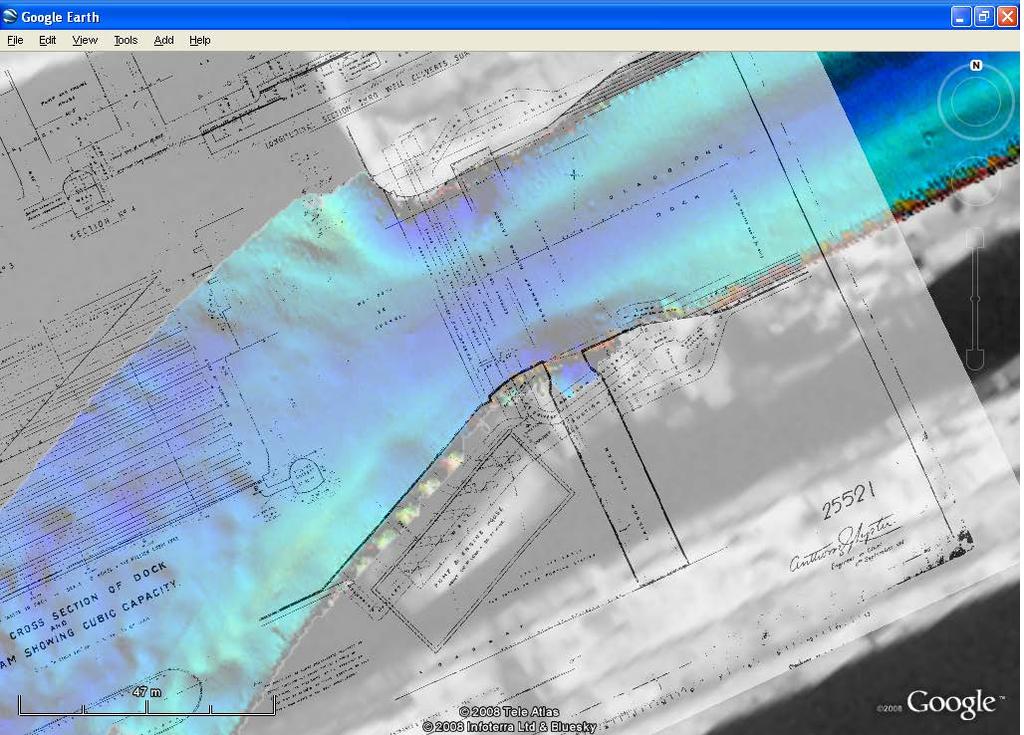
22 Multibeam And Laser Results
23 THANK YOU APPLANIX CAPTURE EVERYTHING
An Overview of Applanix.
 An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
APPLANIX DIRECT GEOREFERENCING FOR AIRBORNE MAPPING. and FLIGHT MANAGEMENT SYSTEMS. The Better Way to Reduce the Cost of Airborne Mapping
 APPLANIX DIRECT GEOREFERENCING and FLIGHT MANAGEMENT SYSTEMS FOR AIRBORNE MAPPING The Better Way to Reduce the Cost of Airborne Mapping capture everything. precisely. Applanix Direct Georeferencing and
APPLANIX DIRECT GEOREFERENCING and FLIGHT MANAGEMENT SYSTEMS FOR AIRBORNE MAPPING The Better Way to Reduce the Cost of Airborne Mapping capture everything. precisely. Applanix Direct Georeferencing and
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy
 Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Trends in Digital Aerial Acquisition Systems
 Trends in Digital Aerial Acquisition Systems Ernest Yap Regional Sales Manager, Airborne-Americas eyap@applanix.com 1 Medium Format Digital Cameras Medium Format Digital Cameras Where does the Medium
Trends in Digital Aerial Acquisition Systems Ernest Yap Regional Sales Manager, Airborne-Americas eyap@applanix.com 1 Medium Format Digital Cameras Medium Format Digital Cameras Where does the Medium
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER
 SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Mapping Project Report Table of Contents
 LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
LANDINS Georeferencing and Orientation System
 LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
Direct Georeferencing and Flight Management Solutions for Airborne Mapping
 CAPTURE EVERYTHING Direct Georeferencing and Flight Management Solutions for Airborne Mapping Because The World s Not Standing Still. Applanix Products and Solutions accurately and reliably, capture and
CAPTURE EVERYTHING Direct Georeferencing and Flight Management Solutions for Airborne Mapping Because The World s Not Standing Still. Applanix Products and Solutions accurately and reliably, capture and
novatel.com For comprehensive Waypoint information, visit:
 novatel.com For comprehensive Waypoint information, visit: www.novatel.com/waypoint novatel.com Waypoint EXCEPTIONAL POST-PROCESSING SOFTWARE Enhance your GNSS Position, Velocity and Attitude Accuracy
novatel.com For comprehensive Waypoint information, visit: www.novatel.com/waypoint novatel.com Waypoint EXCEPTIONAL POST-PROCESSING SOFTWARE Enhance your GNSS Position, Velocity and Attitude Accuracy
Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery
 A Pictometry International, Corp White Paper Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery Michael J. Zoltek VP, Surveying & Mapping Pictometry International, Corp
A Pictometry International, Corp White Paper Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery Michael J. Zoltek VP, Surveying & Mapping Pictometry International, Corp
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Software for Hydrographic Data Processing
 Software for Hydrographic Data Processing Data courtesy of Dr. T. Komatsu, Tokyo University Ocean Research Institute CleanSweep provides a fast, user friendly environment for processing hydrographic survey
Software for Hydrographic Data Processing Data courtesy of Dr. T. Komatsu, Tokyo University Ocean Research Institute CleanSweep provides a fast, user friendly environment for processing hydrographic survey
Airborne Kinematic Positioning and Attitude Determination Without Base Stations
 Airborne Kinematic Positioning and Attitude Determination Without Base Stations Mohamed M. R. Mostafa and Joseph Hutton Applanix Corporation 85 Leek Cr., Richmond Hill Ontario, Canada L4B 3B3 Phone: (905)
Airborne Kinematic Positioning and Attitude Determination Without Base Stations Mohamed M. R. Mostafa and Joseph Hutton Applanix Corporation 85 Leek Cr., Richmond Hill Ontario, Canada L4B 3B3 Phone: (905)
1. LiDAR System Description and Specifications
 High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Phone: Fax: Table of Contents
 Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
Applanix POS AV TM and POSTrack TM : Frequently Asked Questions
 Applanix POS AV TM and POSTrack TM : Frequently Asked Questions 1) What is a Direct Georeferencing System? A direct georeferencing (DG) system provides the ability to directly relate the data collected
Applanix POS AV TM and POSTrack TM : Frequently Asked Questions 1) What is a Direct Georeferencing System? A direct georeferencing (DG) system provides the ability to directly relate the data collected
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN
 OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Delph. Seabed Mapping Software Suite FEATURES ABOUT DELPH SOFTWARE SUITE BENEFITS APPLICATIONS
 Delph Seabed Mapping Software Suite Delph Seismic, Delph Sonar and Delph Mag are complete software packages with dedicated acquisition, processing and interpretation components. They operate with any sidescan
Delph Seabed Mapping Software Suite Delph Seismic, Delph Sonar and Delph Mag are complete software packages with dedicated acquisition, processing and interpretation components. They operate with any sidescan
W D-0049/004 EN
 September 21, 2011 Contact Ground Survey Report, Lidar Accuracy Report, & Project Report New Madrid Seismic Zone Northeast of Memphis, Tennessee Contract Number: W91278-09D-0049/004 EN Project: C-10-026
September 21, 2011 Contact Ground Survey Report, Lidar Accuracy Report, & Project Report New Madrid Seismic Zone Northeast of Memphis, Tennessee Contract Number: W91278-09D-0049/004 EN Project: C-10-026
Simulation of GNSS/IMU Measurements. M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide
 Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
Phone: (603) Fax: (603) Table of Contents
 Fax: (603) Table of Contents") Hydrologic and topographic controls on the distribution of organic carbon in forest Soils LIDAR Mapping Project Report Principal Investigator: Adam Finkelman Plumouth State University Plymouth State University,
Hydrologic and topographic controls on the distribution of organic carbon in forest Soils LIDAR Mapping Project Report Principal Investigator: Adam Finkelman Plumouth State University Plymouth State University,
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Error Simulation and Multi-Sensor Data Fusion
 Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018
 a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
Wide-area kinematic GNSS
 Wide-area, sub-decimetre positioning for airborne LiDAR surveys using CORSnet-NSW Oscar L. Colombo GEST/Goddard Space Flight Center Maryland, USA Shane Brunker, Glenn Jones, Volker Janssen NSW Land & Property
Wide-area, sub-decimetre positioning for airborne LiDAR surveys using CORSnet-NSW Oscar L. Colombo GEST/Goddard Space Flight Center Maryland, USA Shane Brunker, Glenn Jones, Volker Janssen NSW Land & Property
IMPROVING THE PERFORMANCE OF MEMS IMU/GPS POS SYSTEMS FOR LAND BASED MMS UTILIZING TIGHTLY COUPLED INTEGRATION AND ODOMETER
 IMPROVING THE PERFORMANCE OF MEMS IMU/GPS POS SYSTEMS FOR LAND BASED MMS UTILIZING TIGHTLY COUPLED INTEGRATION AND ODOMETER Y-W. Huang,a,K-W. Chiang b Department of Geomatics, National Cheng Kung University,
IMPROVING THE PERFORMANCE OF MEMS IMU/GPS POS SYSTEMS FOR LAND BASED MMS UTILIZING TIGHTLY COUPLED INTEGRATION AND ODOMETER Y-W. Huang,a,K-W. Chiang b Department of Geomatics, National Cheng Kung University,
Prepared for: CALIFORNIA COAST COMMISSION c/o Dr. Stephen Schroeter 45 Fremont Street, Suite 2000 San Francisco, CA
 REVIEW OF MULTIBEAM SONAR SURVEYS WHEELER REEF NORTH, SAN CLEMENTE, CALIFORNIA TO EVALUATE ACCURACY AND PRECISION OF REEF FOOTPRINT DETERMINATIONS AND CHANGES BETWEEN 2008 AND 2009 SURVEYS Prepared for:
REVIEW OF MULTIBEAM SONAR SURVEYS WHEELER REEF NORTH, SAN CLEMENTE, CALIFORNIA TO EVALUATE ACCURACY AND PRECISION OF REEF FOOTPRINT DETERMINATIONS AND CHANGES BETWEEN 2008 AND 2009 SURVEYS Prepared for:
William E. Dietrich Professor 313 McCone Phone Fax (fax)
") February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
APN-078: Configuring SPAN for Hydrographic Applications in OEM7
 APN-078: Configuring SPAN for Hydrographic Applications in OEM7 1 Table of Contents 1 Overview... 3 2 ALIGN Calibration... 4 2.1 ALIGN Calibration Procedure... 5 4. SPAN Configuration for Hydrographic
APN-078: Configuring SPAN for Hydrographic Applications in OEM7 1 Table of Contents 1 Overview... 3 2 ALIGN Calibration... 4 2.1 ALIGN Calibration Procedure... 5 4. SPAN Configuration for Hydrographic
TechnicalNotes. Trimble Total Control Software
 TechnicalNotes Trimble Total Control Software POWERFUL GEODETIC CONTROL FOR ALL SURVEY PROJECTS A survey is only as good as its control elements. Trimble Total Control software puts you in total control
TechnicalNotes Trimble Total Control Software POWERFUL GEODETIC CONTROL FOR ALL SURVEY PROJECTS A survey is only as good as its control elements. Trimble Total Control software puts you in total control
SPAR, ELMF 2013, Amsterdam. Laser Scanning on the UK Highways Agency Network. Hamish Grierson Blom Uk
 SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Kinematic Data Processing
 Kinematic Data Processing Program track Kinematic GPS The style of GPS data collection and processing suggests that one or more GPS stations is moving (e.g., car, aircraft) To obtain good results for positioning
Kinematic Data Processing Program track Kinematic GPS The style of GPS data collection and processing suggests that one or more GPS stations is moving (e.g., car, aircraft) To obtain good results for positioning
Working with airborne LIDAR system
 48 24 3 23 REPORT OF HYDROGRAPHIC AND OCEANOGRAPHIC RESEARCHES No.48 March, 2012 Working with airborne LIDAR system Tomozou ONO and Haruka SHIBATA Abstract Eight years have passed since introduction in
48 24 3 23 REPORT OF HYDROGRAPHIC AND OCEANOGRAPHIC RESEARCHES No.48 March, 2012 Working with airborne LIDAR system Tomozou ONO and Haruka SHIBATA Abstract Eight years have passed since introduction in
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
CODEVINTEC. Caris Hydrographic Survey. CARIS HIPS and SIPS CARIS Onboard. Bathy DataBASE 4.4. Bathy DataBASE Server 4.3. BASE Editor 4.
 45 27 39.384 N 9 07 30.145 E Caris Hydrographic Survey Photo: João Ventura da Cruz CARIS HIPS and SIPS 10.4 page 2 CARIS Onboard page 4 Bathy DataBASE 4.4 page 6 Bathy DataBASE Server 4.3 page 7 BASE Editor
45 27 39.384 N 9 07 30.145 E Caris Hydrographic Survey Photo: João Ventura da Cruz CARIS HIPS and SIPS 10.4 page 2 CARIS Onboard page 4 Bathy DataBASE 4.4 page 6 Bathy DataBASE Server 4.3 page 7 BASE Editor
Quantifying the Geomorphic and Sedimentological Responses to Dam Removal. Mapping Project Report
 Quantifying the Geomorphic and Sedimentological Responses to Dam Removal. Mapping Project Report January 21, 2011 Principal Investigator: John Gartner Dartmouth College Department of Earth Sciences Hanover,
Quantifying the Geomorphic and Sedimentological Responses to Dam Removal. Mapping Project Report January 21, 2011 Principal Investigator: John Gartner Dartmouth College Department of Earth Sciences Hanover,
Yosemite National Park LiDAR Mapping Project Report
 Yosemite National Park LiDAR Mapping Project Report Feb 1, 2011 Principal Investigator: Greg Stock, PhD, PG Resources Management and Science Yosemite National Park 5083 Foresta Road, PO Box 700 El Portal,
Yosemite National Park LiDAR Mapping Project Report Feb 1, 2011 Principal Investigator: Greg Stock, PhD, PG Resources Management and Science Yosemite National Park 5083 Foresta Road, PO Box 700 El Portal,
Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar
 Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar F. Jean IXSEA, 46, quai François Mitterrand, 13600 La Ciotat,
Several imaging algorithms for synthetic aperture sonar and forward looking gap-filler in real-time and post-processing on IXSEA s Shadows sonar F. Jean IXSEA, 46, quai François Mitterrand, 13600 La Ciotat,
Up to 4 range measurements per pulse, including last 4 Intensity readings with 12-bit dynamic range for each measurement
 Project PI: Hugo A. Gutierrez Jurado 1. ALTM Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Cessna Skymaster (Tail
Project PI: Hugo A. Gutierrez Jurado 1. ALTM Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Cessna Skymaster (Tail
Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150
 White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
Qimera 1.5 FAQ 30 October 2017
 30 October 2017 1. Qimera FAQ.......................................................................................... 3 1.1 Qimera General...................................................................................
30 October 2017 1. Qimera FAQ.......................................................................................... 3 1.1 Qimera General...................................................................................
TIMMS : FAST, ACCURATE & COST-EFFECTIVE INDOOR MAPPING
 TIMMS : FAST, ACCURATE & COST-EFFECTIVE INDOOR MAPPING Designed for ease-of-use and maneuverability, TIMMS is a high-productivity tool for accurately measuring, georeferencing and modeling interior spaces
TIMMS : FAST, ACCURATE & COST-EFFECTIVE INDOOR MAPPING Designed for ease-of-use and maneuverability, TIMMS is a high-productivity tool for accurately measuring, georeferencing and modeling interior spaces
Studies. Reno, NV USA
 Data Collection and Processing Report forr 2015 Mapping Project of the Walker Fault System in Nevadaa PI: Steven G. Wesnousky Steven G. Wesnousky Professor of Geology and Seismology Director Center for
Data Collection and Processing Report forr 2015 Mapping Project of the Walker Fault System in Nevadaa PI: Steven G. Wesnousky Steven G. Wesnousky Professor of Geology and Seismology Director Center for
Automating Data Accuracy from Multiple Collects
 Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
Automating Data Accuracy from Multiple Collects David JANSSEN, Canada Key words: lidar, data processing, data alignment, control point adjustment SUMMARY When surveyors perform a 3D survey over multiple
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann
 GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann Agenda Why LiDAR? The value of an end-to-end workflow The Trimble AX-Series Data processing & modelling Information
GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann Agenda Why LiDAR? The value of an end-to-end workflow The Trimble AX-Series Data processing & modelling Information
Getting Started for GIS data
 EZSurv Getting Started for GIS data Version 2.96 2012-2016 Effigis, All rights reserved. 1 Summary Information Why post-processing? Compatible data collection software Basic post-processing concepts 2
EZSurv Getting Started for GIS data Version 2.96 2012-2016 Effigis, All rights reserved. 1 Summary Information Why post-processing? Compatible data collection software Basic post-processing concepts 2
Aided-inertial for GPS-denied Navigation and Mapping
 Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
Bayesian Train Localization Method Extended By 3D Geometric Railway Track Observations From Inertial Sensors
 www.dlr.de Chart 1 Fusion 2012 > Oliver Heirich Extended Bayesian Train Localization > 10.7.2012 Bayesian Train Localization Method Extended By 3D Geometric Railway Track Observations From Inertial Sensors
www.dlr.de Chart 1 Fusion 2012 > Oliver Heirich Extended Bayesian Train Localization > 10.7.2012 Bayesian Train Localization Method Extended By 3D Geometric Railway Track Observations From Inertial Sensors
LiDAR Data Processing:
 LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments
 Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
Title: Understanding Hyporheic Zone Extent and Exchange in a Coastal New Hampshire Stream Using Heat as A Tracer
 Contact information Danna Truslow d.truslow@comcast.net Phone: 603-498-2916 Fax: 603-430-9102 Address: 1065 Washington Road Rye, NH 03970 Advisor: Jennifer Jacobs Advisor's email: jennifer.jacobs@unh.edu
Contact information Danna Truslow d.truslow@comcast.net Phone: 603-498-2916 Fax: 603-430-9102 Address: 1065 Washington Road Rye, NH 03970 Advisor: Jennifer Jacobs Advisor's email: jennifer.jacobs@unh.edu
USVs for Hydrographic Survey of Inland Waterways
 USVs for Hydrographic Survey of Inland Waterways John Tamplin President Seafloor Systems, Inc. MAY 9, 2017 USVs for Hydrographic Survey of Inland Waters Tools, Preparation, and Implementation of Unmanned
USVs for Hydrographic Survey of Inland Waterways John Tamplin President Seafloor Systems, Inc. MAY 9, 2017 USVs for Hydrographic Survey of Inland Waters Tools, Preparation, and Implementation of Unmanned
Getting Started for GIS data
 EZSurv Getting Started for GIS data Version 2.94 2012-2014 Effigis, All rights reserved. 1 Summary Information Why post-processing? Compatible data collection software Basic post-processing concepts 2
EZSurv Getting Started for GIS data Version 2.94 2012-2014 Effigis, All rights reserved. 1 Summary Information Why post-processing? Compatible data collection software Basic post-processing concepts 2
Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report
 Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report Principal Investigator: Wetherbee Dorshow University of New Mexico 15 Palacio Road Santa Fe, NM 87508 e-mail:
Simulating Dynamic Hydrological Processes in Archaeological Contexts Mapping Project Report Principal Investigator: Wetherbee Dorshow University of New Mexico 15 Palacio Road Santa Fe, NM 87508 e-mail:
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition
 LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition Submitted by: 4605 NE Fremont, Suite 211 Portland, Oregon 97213 April, 2006 Table of Contents LIGHT DETECTION
LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition Submitted by: 4605 NE Fremont, Suite 211 Portland, Oregon 97213 April, 2006 Table of Contents LIGHT DETECTION
Satellite and Inertial Navigation and Positioning System
 Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
The road data acquisition system MoSES determination and accuracy of trajectory data gained with the Applanix POS/LV
 The road data acquisition system MoSES determination and accuracy of trajectory data gained with the Applanix POS/LV Graefe, G. ; Caspary, W. ; Heister, H. ; Klemm, J. Institute of Geodesy University of
The road data acquisition system MoSES determination and accuracy of trajectory data gained with the Applanix POS/LV Graefe, G. ; Caspary, W. ; Heister, H. ; Klemm, J. Institute of Geodesy University of
The Most Comprehensive Solution for Indoor Mapping Applications
 The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
Mobile 3D laser scanning technology application in the surveying of urban underground rail transit
 IOP Conference Series: Earth and Environmental Science PAPER OPEN ACCESS Mobile 3D laser scanning technology application in the surveying of urban underground rail transit To cite this article: Youmei
IOP Conference Series: Earth and Environmental Science PAPER OPEN ACCESS Mobile 3D laser scanning technology application in the surveying of urban underground rail transit To cite this article: Youmei
TerraSystem LidarPod
 TerraSystem LidarPod a complete turnkey system New to the market, the TerraSystem UAV LidarPod is a complete turnkey system developed specifically for use on Unmanned Aerial Vehicles (UAVs). Survey industry
TerraSystem LidarPod a complete turnkey system New to the market, the TerraSystem UAV LidarPod is a complete turnkey system developed specifically for use on Unmanned Aerial Vehicles (UAVs). Survey industry
DYNAMIC POSITIONING CONFERENCE September 16-17, Sensors
 DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
GPS/INS Integration in Real-time and Postprocessing with NovAtel s SPAN System
 International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, Australia 4 6 December, 2007 GPS/INS Integration in Real-time and Postprocessing
International Global Navigation Satellite Systems Society IGNSS Symposium 2007 The University of New South Wales, Sydney, Australia 4 6 December, 2007 GPS/INS Integration in Real-time and Postprocessing
Gemini Profiler with Survey Software
 0695-SOM-00008, Issue: 02 1 Tritech International Ltd. QPS QINSy 0695-SOM-00008, Issue: 02 Tritech International Ltd The copyright in this document is the property of Tritech International Ltd. The document
0695-SOM-00008, Issue: 02 1 Tritech International Ltd. QPS QINSy 0695-SOM-00008, Issue: 02 Tritech International Ltd The copyright in this document is the property of Tritech International Ltd. The document
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
ICC experiences on Inertial / GPS sensor orientation. A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC
 ICC experiences on Inertial / GPS sensor orientation A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC Keywords: GPS/INS orientation, robustness Abstract In the last few years the photogrammetric
ICC experiences on Inertial / GPS sensor orientation A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC Keywords: GPS/INS orientation, robustness Abstract In the last few years the photogrammetric
> > Cut training costs: The low-maintenance Merlin. > > Add value: By expanding your product offering,
 45 27 39.384 N 9 07 30.145 E Merlin Vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew spend in hazardous
45 27 39.384 N 9 07 30.145 E Merlin Vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew spend in hazardous
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
GeoLas Consulting All rights reserved. LiDAR GeocodeWF Rev. 03/2012 Specifications subject to change without notice.
 GeocodeWF is the tool for converting the raw waveform data collected by Riegl LMS-Q560 and LMS-Q680 laserscanner-based lidar systems into geocoded points in a projected coordinate system. GeocodeWF is
GeocodeWF is the tool for converting the raw waveform data collected by Riegl LMS-Q560 and LMS-Q680 laserscanner-based lidar systems into geocoded points in a projected coordinate system. GeocodeWF is
Trimble Geospatial Division Integrated Solutions for Geomatics professions. Volker Zirn Regional Sales Representative
 Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
INS aided subsurface positioning for ROV surveys
 INS aided subsurface positioning for ROV surveys M. van de Munt, Allseas Engineering B.V., The Netherlands R van der Velden, Allseas Engineering B.V., The Netherlands K. Epke, Allseas Engineering B.V.,
INS aided subsurface positioning for ROV surveys M. van de Munt, Allseas Engineering B.V., The Netherlands R van der Velden, Allseas Engineering B.V., The Netherlands K. Epke, Allseas Engineering B.V.,
Geocoder: An Efficient Backscatter Map Constructor
 Geocoder: An Efficient Backscatter Map Constructor Luciano Fonseca, Brian Calder Center for Coastal and Ocean Mapping, University of New Hampshire Durham, NH 03824 ABSTRACT: The acoustic backscatter acquired
Geocoder: An Efficient Backscatter Map Constructor Luciano Fonseca, Brian Calder Center for Coastal and Ocean Mapping, University of New Hampshire Durham, NH 03824 ABSTRACT: The acoustic backscatter acquired
Lecture ID: WT
 GNSS Online Lecture # 1 Lecture ID: WT-103-401 Lecture Topic: GNSS Data Processing in RTKLIB Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
GNSS Online Lecture # 1 Lecture ID: WT-103-401 Lecture Topic: GNSS Data Processing in RTKLIB Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: dinesh@iis.u-tokyo.ac.jp
Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications
 Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications By Sameh Nassar and Naser El-Sheimy University of Calgary, Canada Contents Background INS/GPS Integration & Direct Georeferencing
Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications By Sameh Nassar and Naser El-Sheimy University of Calgary, Canada Contents Background INS/GPS Integration & Direct Georeferencing
Product Guide UPDATED. Look into NovAtel s Precise Positioning Engines and Enclosures
 Look into NovAtel s Precise Positioning Engines and Enclosures See why NovAtel s extensive product line, including L1 and L1/L2 positioning UPDATED engines and enclosures, is on the leading edge of positioning
Look into NovAtel s Precise Positioning Engines and Enclosures See why NovAtel s extensive product line, including L1 and L1/L2 positioning UPDATED engines and enclosures, is on the leading edge of positioning
The Performance Evaluation of the Integration of Inertial Navigation System and Global Navigation Satellite System with Analytic Constraints
 Journal of Environmental Science and Engineering A 6 (2017) 313-319 doi:10.17265/2162-5298/2017.06.005 D DAVID PUBLISHING The Performance Evaluation of the Integration of Inertial Navigation System and
Journal of Environmental Science and Engineering A 6 (2017) 313-319 doi:10.17265/2162-5298/2017.06.005 D DAVID PUBLISHING The Performance Evaluation of the Integration of Inertial Navigation System and
Merlin vessel-based lidar system
 Brochure: Merlin vessel-based lidar system Merlin vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew
Brochure: Merlin vessel-based lidar system Merlin vessel-based lidar system Map the full environment in one pass Scanning the full marine environment in a single operation reduces the amount of time crew
Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping
 Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping Erik Lithopoulos, Louis Lalumiere, Ron Beyeler Applanix Corporation Greg Spurlock, LTC Bruce Williams Defense Threat Reduction
Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping Erik Lithopoulos, Louis Lalumiere, Ron Beyeler Applanix Corporation Greg Spurlock, LTC Bruce Williams Defense Threat Reduction
Quinnipiac Post Flight Aerial Acquisition Report
 Quinnipiac Post Flight Aerial Acquisition Report August 2011 Post-Flight Aerial Acquisition and Calibration Report FEMA REGION 1 Quinnipiac Watershed, Connecticut, Massachusesetts FEDERAL EMERGENCY MANAGEMENT
Quinnipiac Post Flight Aerial Acquisition Report August 2011 Post-Flight Aerial Acquisition and Calibration Report FEMA REGION 1 Quinnipiac Watershed, Connecticut, Massachusesetts FEDERAL EMERGENCY MANAGEMENT
POS MV V5 Release Notes
 POS MV V5 Release Notes Document # PUBS-CINS-004279 Revision: 26 Date: May 31, 2018 THE INFORMATION CONTAINED HEREIN IS PROPRIETARY TO APPLANIX CORPORATION. RELEASE TO THIRD PARTIES OF THIS PUBLICATION
POS MV V5 Release Notes Document # PUBS-CINS-004279 Revision: 26 Date: May 31, 2018 THE INFORMATION CONTAINED HEREIN IS PROPRIETARY TO APPLANIX CORPORATION. RELEASE TO THIRD PARTIES OF THIS PUBLICATION
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
WADDENZEE SPRING SURVEY
 Report Lidar Survey WADDENZEE SPRING SURVEY 2016 Datum: 6th of June 2016 Client: Nederlandse Aardolie Maatschappij : Author: W. Velthoven Reviewer: F. de Boeck Project number: N605 Version: v1 page 1 van
Report Lidar Survey WADDENZEE SPRING SURVEY 2016 Datum: 6th of June 2016 Client: Nederlandse Aardolie Maatschappij : Author: W. Velthoven Reviewer: F. de Boeck Project number: N605 Version: v1 page 1 van
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
Observed Differential Carrier Phase Float Accuracies on three Kinematic Surveys using a u-blox Antaris GPS Receiver under Open Sky Conditions
 Observed Differential Carrier Phase Float Accuracies on three Kinematic Surveys using a u-blox Antaris GPS Receiver under Open Sky Conditions By David MacDonald Waypoint Consulting Inc. June 2005 Three
Observed Differential Carrier Phase Float Accuracies on three Kinematic Surveys using a u-blox Antaris GPS Receiver under Open Sky Conditions By David MacDonald Waypoint Consulting Inc. June 2005 Three
Lidar Technical Report
 Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Geometric validation of a mobile laser scanning system for urban applications
 Geometric validation of a mobile laser scanning system for urban applications Haiyan Guan 1, Jonathan Li 1,2, Yongtao Yu 2, Yan Liu 2 1 GeoSTARS Lab, Faculty of Environment, University of Waterloo, 200
Geometric validation of a mobile laser scanning system for urban applications Haiyan Guan 1, Jonathan Li 1,2, Yongtao Yu 2, Yan Liu 2 1 GeoSTARS Lab, Faculty of Environment, University of Waterloo, 200