Tracking Computer Vision Spring 2018, Lecture 24
|
|
|
- Coleen Candice Day
- 6 years ago
- Views:
Transcription

1 Tracking Computer Vision Spring 2018, Lecture 24
2 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How many of you have looked at/started/finished homework 6? This week Yannis office hours will be on Wednesday 3-6 pm. - Added an extra hour to make up for change.
3 Overview of today s lecture KLT tracker. Mean-shift algorithm. Kernel density estimation. Mean-shift tracker. Modern trackers.
4 Slide credits Most of these slides were adapted from: Kris Kitani (16-385, Spring 2017).
5
6

7
8 All lectures and talks are free for CMU students! (You only need to pay for registration to attend the free food events.)
9 All lectures and talks are free for CMU students! (You only need to pay for registration to attend the free food events.) Everything in blue is free!






10 15-463/15-663/ Computational Photography Learn about this and other unconventional cameras and build some on your own! cameras that take video at the speed of light cameras that measure depth in real time cameras that capture entire focal stacks cameras that see around corners ICCP covers all of these
11 Kanade-Lucas-Tomasi (KLT) tracker

12
13 Feature-based tracking Up to now, we ve been aligning entire images but we can also track just small image regions too! (sometimes called sparse tracking or sparse alignment) How should we select the small images (features)? How should we track them from frame to frame?


14 History of the Kanade-Lucas-Tomasi Lucas Kanade (KLT) Tracker An Iterative Image Registration Technique with an Application to Stereo Vision Kanade Tomasi Detection and Tracking of Feature Points The original KLT algorithm Tomasi Shi Good Features to Track. 1994
15 Kanade-Lucas-Tomasi How should we track them from frame to frame? Lucas-Kanade Method for aligning (tracking) an image patch How should we select features? Tomasi-Kanade Method for choosing the best feature (image patch) for tracking
16 What are good features for tracking?
17 What are good features for tracking? Intuitively, we want to avoid smooth regions and edges. But is there a more is principled way to define good features?
18 What are good features for tracking? Can be derived from the tracking algorithm
19 What are good features for tracking? Can be derived from the tracking algorithm A feature is good if it can be tracked well
20 Recall the Lucas-Kanade image alignment method: error function (SSD) incremental update
21 Recall the Lucas-Kanade image alignment method: error function (SSD) incremental update linearize
22 Recall the Lucas-Kanade image alignment method: error function (SSD) incremental update linearize Gradient update
23 Recall the Lucas-Kanade image alignment method: error function (SSD) incremental update linearize Gradient update Update
24 Stability of gradient decent iterations depends on
25 Stability of gradient decent iterations depends on Inverting the Hessian When does the inversion fail?
26 Stability of gradient decent iterations depends on Inverting the Hessian When does the inversion fail? H is singular. But what does that mean?
27 Above the noise level both Eigenvalues are large Well-conditioned both Eigenvalues have similar magnitude

28 Concrete example: Consider translation model Hessian when is this singular? How are the eigenvalues related to image content?
29 interpreting eigenvalues l 2 l 2 >> l 1 What kind of image patch does each region represent? l 1 >> l 2 l 1
30 interpreting eigenvalues l 2 horizontal edge l 2 >> l 1 corner l 1 ~ l 2 flat vertical edge l 1 >> l 2 l 1

31 interpreting eigenvalues l 2 horizontal edge l 2 >> l 1 corner l 1 ~ l 2 flat vertical edge l 1 >> l 2 l 1
32 What are good features for tracking?
33 What are good features for tracking? big Eigenvalues means good for tracking
34 KLT algorithm 1. Find corners satisfying 2. For each corner compute displacement to next frame using the Lucas-Kanade method 3. Store displacement of each corner, update corner position 4. (optional) Add more corner points every M frames using 1 5. Repeat 2 to 3 (4) 6. Returns long trajectories for each corner point
35 Mean-shift algorithm

36
37 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975)
 Find the region of")
38 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Find the region of highest density
39 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Pick a point
40 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Draw a window
41 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the (weighted) mean
42 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
43 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
44 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
45 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
46 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
47 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
48 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
49 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
50 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
51 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
52 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
53 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
54 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window
55 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Compute the mean
56 Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Shift the window To understand the theory behind this we need to understand
57 Kernel density estimation
58 To understand the mean shift algorithm Kernel Density Estimation A method to approximate an underlying PDF from samples sum of bumps bumps samples (+) Put bump on every sample to approximate the PDF
59 Say we have some hidden PDF p(x) probability density function cumulative density function
60 randomly sample 1 We can draw samples, using the CDF 0
61 randomly sample 1 0
62 randomly sample 1 0 samples
63 Now to estimate the hidden PDF place Gaussian bumps on the samples samples
64 samples discretized bump
65 samples
66 samples

67 Kernel Density Estimate approximates the original PDF samples
68 Kernel Density Estimation Approximate the underlying PDF from samples from it For example Gaussian bump aka kernel but there are many types of kernels! Put bump on every sample to approximate the PDF
69 Kernel Function returns the distance between two points



70 Epanechnikov kernel Uniform kernel Normal kernel These are all radially symmetric kernels
71 Radially symmetric kernels can be written in terms of its profile profile
72 Connecting KDE and the Mean Shift Algorithm
73 Mean-Shift Tracking Given a set of points: and a kernel: Find the mean sample point:
74 Mean-Shift Algorithm Initialize While place we start shift values becomes really small 1. Compute mean-shift compute the mean compute the shift 2. Update update the point Where does this algorithm come from?
75 Mean-Shift Algorithm Initialize While 1. Compute mean-shift Where does this come from? 2. Update Where does this algorithm come from?

76 How is the KDE related to the mean shift algorithm? Recall: Kernel density estimate (radially symmetric kernels) can compute probability for any point using the KDE! We can show that: Gradient of the PDF is related to the mean shift vector The mean shift vector is a step in the direction of the gradient of the KDE mean-shift algorithm is maximizing the objective function
77 In mean-shift tracking, we are trying to find this which means we are trying to
78 We are trying to optimize this: find the solution that has the highest probability usually non-linear non-parametric How do we optimize this non-linear function?
79 We are trying to optimize this: usually non-linear non-parametric How do we optimize this non-linear function? compute partial derivatives gradient descent!
80 Compute the gradient
81 Gradient Expand the gradient (algebra)
82 Gradient Expand gradient
83 Gradient Expand gradient Call the gradient of the kernel function g
84 Gradient Expand gradient change of notation (kernel-shadow pairs) keep this in memory:
85 multiply it out too long! (use short hand notation)
86 multiply by one! collecting like terms What s happening here?

87 mean shift constant mean shift! The mean shift is a step in the direction of the gradient of the KDE Let Can interpret this to be gradient ascent with data dependent step size
88 Mean-Shift Algorithm Initialize While 1. Compute mean-shift gradient with adaptive step size 2. Update Just 5 lines of code!
89 Everything up to now has been about distributions over samples
90 Mean-shift tracker
91 Dealing with images Pixels for a lattice, spatial density is the same everywhere! What can we do?
92 Consider a set of points: Associated weights: Sample mean: Mean shift:
93 Initialize While Mean-Shift Algorithm (for images) 1. Compute mean-shift 2. Update
94 For images, each pixel is point with a weight
95 For images, each pixel is point with a weight
96 For images, each pixel is point with a weight
97 For images, each pixel is point with a weight
98 For images, each pixel is point with a weight
99 For images, each pixel is point with a weight
100 For images, each pixel is point with a weight
101 For images, each pixel is point with a weight
102 For images, each pixel is point with a weight
103 For images, each pixel is point with a weight
104 For images, each pixel is point with a weight
105 For images, each pixel is point with a weight
106 For images, each pixel is point with a weight
107 For images, each pixel is point with a weight
108 Finally mean shift tracking in video!

109 Goal: find the best candidate location in frame 2 center coordinate of target center coordinate of candidate target candidate there are many candidates but only one target Frame 1 Frame 2 Use the mean shift algorithm to find the best candidate location
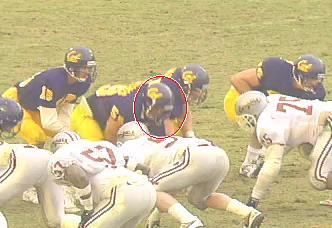
110 Non-rigid object tracking hand tracking
111 Compute a descriptor for the target Target
112 Search for similar descriptor in neighborhood in next frame Target Candidate
113 Compute a descriptor for the new target Target
114 Search for similar descriptor in neighborhood in next frame Target Candidate
115 How do we model the target and candidate regions?
116 Modeling the target M-dimensional target descriptor (centered at target center) a fancy (confusing) way to write a weighted histogram Normalization factor function of inverse distance (weight) quantization function bin ID A normalized color histogram (weighted by distance) sum over all pixels Kronecker delta function
 a weighted histogram at y")
117 Modeling the candidate M-dimensional candidate descriptor (centered at location y) a weighted histogram at y bandwidth
118 Similarity between the target and candidate Distance function Bhattacharyya Coefficient Just the Cosine distance between two unit vectors
119 Now we can compute the similarity between a target and multiple candidate regions
120 target image similarity over image
121 target we want to find this peak image similarity over image
122 Objective function same as Assuming a good initial guess Linearize around the initial guess (Taylor series expansion) function at specified value derivative
123 Linearized objective Remember definition of this? Fully expanded


124 Fully expanded linearized objective Moving terms around Does not depend on unknown y Weighted kernel density estimate where Weight is bigger when
125 OK, why are we doing all this math?
126 We want to maximize this
127 We want to maximize this Fully expanded linearized objective where
128 We want to maximize this Fully expanded linearized objective doesn t depend on unknown y where
129 We want to maximize this Fully expanded linearized objective only need to maximize this! doesn t depend on unknown y where
130 We want to maximize this Fully expanded linearized objective doesn t depend on unknown y where Mean Shift Algorithm! what can we use to solve this weighted KDE?


131 the new sample of mean of this KDE is (new candidate location) (this was derived earlier)
132 Mean-Shift Object Tracking For each frame: 1. Initialize location Compute Compute 2. Derive weights 3. Shift to new candidate location (mean shift) 4. Compute 5. If return Otherwise and go back to 2
133 Compute a descriptor for the target Target
134 Search for similar descriptor in neighborhood in next frame Target Candidate
135 Compute a descriptor for the new target Target
136 Search for similar descriptor in neighborhood in next frame Target Candidate



137
138 Modern trackers
139
140
141 Basic reading: Szeliski, Sections 4.1.4, 5.3. References
Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Visual Tracking. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Computer Vision II Lecture 4
 Computer Vision II Lecture 4 Color based Tracking 29.04.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Single-Object Tracking Background modeling
Computer Vision II Lecture 4 Color based Tracking 29.04.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Single-Object Tracking Background modeling
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Visual Tracking (1) Pixel-intensity-based methods
 Pixel-intensity-based methods") Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Computer Vision II Lecture 4
 Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Motion Tracking. CS4243 Motion Tracking 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Nonparametric Clustering of High Dimensional Data
 Nonparametric Clustering of High Dimensional Data Peter Meer Electrical and Computer Engineering Department Rutgers University Joint work with Bogdan Georgescu and Ilan Shimshoni Robust Parameter Estimation:
Nonparametric Clustering of High Dimensional Data Peter Meer Electrical and Computer Engineering Department Rutgers University Joint work with Bogdan Georgescu and Ilan Shimshoni Robust Parameter Estimation:
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Mean Shift Tracking. CS4243 Computer Vision and Pattern Recognition. Leow Wee Kheng
 CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS4243) Mean Shift Tracking 1 / 28 Mean Shift Mean Shift
CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS4243) Mean Shift Tracking 1 / 28 Mean Shift Mean Shift
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
CS201: Computer Vision Introduction to Tracking
 CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
Kanade Lucas Tomasi Tracking (KLT tracker)
") Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Robert Collins CSE598G. Robert Collins CSE598G
 Recall: Kernel Density Estimation Given a set of data samples x i ; i=1...n Convolve with a kernel function H to generate a smooth function f(x) Equivalent to superposition of multiple kernels centered
Recall: Kernel Density Estimation Given a set of data samples x i ; i=1...n Convolve with a kernel function H to generate a smooth function f(x) Equivalent to superposition of multiple kernels centered
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm
 Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm Dirk W. Wagener, Ben Herbst Department of Applied Mathematics, University of Stellenbosch, Private Bag X1, Matieland 762,
Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm Dirk W. Wagener, Ben Herbst Department of Applied Mathematics, University of Stellenbosch, Private Bag X1, Matieland 762,
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
OPPA European Social Fund Prague & EU: We invest in your future.
 OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
Tracking in image sequences
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
Displacement estimation
 Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Kanade Lucas Tomasi Tracking (KLT tracker)
") Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Comparison between Motion Analysis and Stereo
 MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Towards the completion of assignment 1
 Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
SE 263 R. Venkatesh Babu. Object Tracking. R. Venkatesh Babu
 Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Light transport matrices
 Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Dr. Ulas Bagci
 CAP5415-Computer Vision Lecture 11-Image Segmentation (BASICS): Thresholding, Region Growing, Clustering Dr. Ulas Bagci bagci@ucf.edu 1 Image Segmentation Aim: to partition an image into a collection of
CAP5415-Computer Vision Lecture 11-Image Segmentation (BASICS): Thresholding, Region Growing, Clustering Dr. Ulas Bagci bagci@ucf.edu 1 Image Segmentation Aim: to partition an image into a collection of
Lecture 11: E-M and MeanShift. CAP 5415 Fall 2007
 Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS4495 Fall 2014 Computer Vision Problem Set 5: Optic Flow
 CS4495 Fall 2014 Computer Vision Problem Set 5: Optic Flow DUE: Wednesday November 12-11:55pm In class we discussed optic flow as the problem of computing a dense flow field where a flow field is a vector
CS4495 Fall 2014 Computer Vision Problem Set 5: Optic Flow DUE: Wednesday November 12-11:55pm In class we discussed optic flow as the problem of computing a dense flow field where a flow field is a vector
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
An Introduction to PDF Estimation and Clustering
 Sigmedia, Electronic Engineering Dept., Trinity College, Dublin. 1 An Introduction to PDF Estimation and Clustering David Corrigan corrigad@tcd.ie Electrical and Electronic Engineering Dept., University
Sigmedia, Electronic Engineering Dept., Trinity College, Dublin. 1 An Introduction to PDF Estimation and Clustering David Corrigan corrigad@tcd.ie Electrical and Electronic Engineering Dept., University
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
All images are degraded
 Lecture 7 Image Relaxation: Restoration and Feature Extraction ch. 6 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Lecture 7 Image Relaxation: Restoration and Feature Extraction ch. 6 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Clustering. Discover groups such that samples within a group are more similar to each other than samples across groups.
 Clustering 1 Clustering Discover groups such that samples within a group are more similar to each other than samples across groups. 2 Clustering Discover groups such that samples within a group are more
Clustering 1 Clustering Discover groups such that samples within a group are more similar to each other than samples across groups. 2 Clustering Discover groups such that samples within a group are more
VC 11/12 T11 Optical Flow
 VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture