Planning in Mobile Robotics
|
|
|
- Rudolph Evans
- 6 years ago
- Views:
Transcription
1 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011 laboratory Gerstner

2 syrotek.felk.cvut.cz Reminder Only 27 students have registered till now!

3 syrotek.felk.cvut.cz Enroll the course

4 syrotek.felk.cvut.cz Fill the quizes
5 Terminology: path vs. trajectory Often confused and used as synonyms informally. Path: ordered locus of points in the space (either joint or operational) which the manipulator should follow. Path is a pure geometric description of motion. Trajectory: a path on which timing law is specified, e.g., velocities and accelerations in its each point. hedgehog puzzle mars
6 Robot Motion Planning Path planning Geometric path. Issues: obstacle avoidance, shortest path. Trajectory generating Interpolate or approximate the desired path by a class of polynomial functions and Generate a sequence of time-based control set points for the control of manipulator from the initial configuration to its destination.
7 Lecture outline Few terms and definitions Configuration space Roadmaps Visibility graph Cell decomposition Voronoi diagrams Potential field Probabilistic methods Probabilistic roadmaps Rapidly Exploring Random Trees
8 Holonomicity in robotics Holonomicity refers to the relationship between the controllable and total degrees of freedom of a given robot (or part thereof). Holonomic: if the controllable degrees of freedom is equal to the total degrees of freedom. Non-holonomic: if the controllable degrees of freedom are less than the total degrees of freedom. Redundant robot: if it has more controllable degrees of freedom than degrees of freedom in its task space.
9 Example: A car = non-holonomic Three degrees of freedom: its position in two axes, and its orientation relative to a fixed heading. Only two controllable degrees of freedom: acceleration/braking and the angle of the steering wheel. A car s heading (the direction in which it is traveling) must remain aligned with the orientation of the car, or 180 from it if the car is in reverse. It has no other allowable direction, assuming there is no skidding or sliding. Thus, not every path in phase space is achievable.

10 Path for car-like robot
11 A human arm is holonomic A human arm is a holonomic. It is a redundant system because it has 7 degrees of freedom (3 in the shoulder - rotations about each axis, 2 in the elbow - bending and rotation about the lower arm axis, and 2 in the wrist, bending up and down (i.e. pitch), and left and right (i.e. yaw)). There are only 6 physical degrees of freedom in the task of placing the hand (x, y, z, roll, pitch and yaw), while fixing the seven degrees of freedom fixes the hand.
12 Basic problem Problem statement Compute a collision-free path for a rigid or articulated moving object among static obstacles. Input Geometry of a moving object (a robot, a digital actor, or a molecule) and obstacles. How does the robot move? Kinematics of the robot (degrees of freedom). Initial and goal robot configurations (positions & orientations). Output Continuous sequence of collision-free robot configurations connecting the initial and goal configurations.

13 Hardness results Several variants of the path planning problem have been proven to be PSPACE-hard. A complete algorithm may take exponential time. (A complete algorithm finds a path if one exists and reports no path exists otherwise).
14 Completeness in motion planning Exact Usually computationally expensive. May determine bounds of a problem s complexity. Heuristic Aimed at generating a solution in a short time. May fail to find solution or find poor one at difficult problems. Important in engineering applications. Resolution complete (discretization). Probabilistically complete (probabilistic completeness 1).
15 Scope of motion planning algorithms Global Take into account all environment information. Plan a motion from start to goal configuration. Local Avoid obstacles in the vicinity of the robot. Use information about nearby obstacles only. Used when start and goal are close together. Used as component in global planner, or Used as safety feature to avoid unexpected obstacles not present in environment model, but sensed during motion.
16 Configuration space A key concept for motion planning is a configuration: a complete specification of the position of every point in the system A simple example: a robot that translates but does not rotate in the plane: what is a sufficient representation of its configuration?
17 Notation The space of all possible configurations is the configuration space or C-space. The dimension of C-space = the number of parameters representing a configuration (degree of freedom). Workspace is either the ambient space, or the set of reachable points by an end-effector W (Euclidean 2D, 3D). Robot A: compact subset of R n. Region W taken by a robot in a configuration q: R(q). Examples: Rotating bar fixed at a point A rotating bar that translates along the rotation axis What is its C-space? What is its workspace?
18 Configuration space - manipulator Suppose and obstacle in the robot workspace. Where can we put q B?
19 Obstacles in C-space Let q denote a point in a configuration space Q. The path planning problem is to find a mapping c : [0, 1] Q so that no configuration along the path intersects an obstacle. Obstacle in a workspace: O A configuration space obstacle Q O is the set of configurations q at which the robot R(q) intersects O i : Q O = {q Q R(q) O i } The free configuration space (free space) Q free is Q free = Q (Q Oi ) The free space is generally an open set. A free path is a mapping c : [0, 1] Q free A semifree path is a mapping c : [0, 1] cl(q free ) (cl stands for closure)

20 Example - a circular robot
")
21 Example - configuration space (Accommodation of robot size)

22 Trace the boundary of the workspace A consistent reference point must be picked on the robot. What about non-circular robots?

23 When only translation is allowed For a fixed robot angle, we can build Q Oi Choice of the reference point makes a difference.
24 Star algorithm Complexity: O(m + n) If one polygon is non-convex then complexity is O(mn) If both polygons are non-convex then complexity is O((mn) 2 )
25 Obstacles for a manipulator arm Suppose and obstacle in the robot workspace. Where can we put q B?

26 Configuration space obstacle Suppose and obstacle in the robot workspace. Where can we put q B?


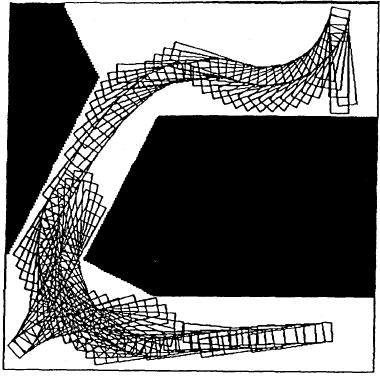
27 Two-link path

28 Additional dimensions If the robot can both translate and rotate. What woud the configuration of the red rectangular robot look like? Naïve solution: 2D
29 A serious problem?

30 A serious problem?

31 When the robot is at one orientation...

32 and the robot at another orientation...

33 Additional dimensions If the robot can both translate and rotate. What woud the configuration of the red rectangular robot look like? Configuration space is 3D.


34 Motion planning in C-space Simple workspace obstacle transformed into complicated C-obstacle! Plan is swept volume Path is 1D curve
35 Configuration space - conclusion Reduction of path planning problem for n-dimensional robot in Euclidean space to path finding for a point robot in C-space. Unified approach to solving a large family of planning problems. Almost everyone use it... Generally, the planning problem is hard: Exponential time w.r.t. the number of C-space dimensions. Polynomial time w.r.t. complexity of obstacles. Two theoretical methods: Exact decomposition based on cylindrical decomposition (Schwartz, Sharir). Roadmaps O(2 d ) (Canny) The complexities hold for,,common problems. Solution: simplification, approximation.
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Prof. Fanny Ficuciello Robotics for Bioengineering Trajectory planning
 Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
CS 763 F16. Moving objects in space with obstacles/constraints.
 Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Robotic Motion Planning: Configuration Space
 Robotic Motion Planning: Configuration Space Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not a point? The Scout should
Robotic Motion Planning: Configuration Space Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not a point? The Scout should
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
which is shown in Fig We can also show that the plain old Puma cannot reach the point we specified
 152 Fig. 7.8. Redundant manipulator P8 >> T = transl(0.5, 1.0, 0.7) * rpy2tr(0, 3*pi/4, 0); The required joint coordinates are >> qi = p8.ikine(t) qi = -0.3032 1.0168 0.1669-0.4908-0.6995-0.1276-1.1758
152 Fig. 7.8. Redundant manipulator P8 >> T = transl(0.5, 1.0, 0.7) * rpy2tr(0, 3*pi/4, 0); The required joint coordinates are >> qi = p8.ikine(t) qi = -0.3032 1.0168 0.1669-0.4908-0.6995-0.1276-1.1758
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Chapter 3. Geometric Representations and Transformations. Steven M. LaValle. University of Illinois. Copyright 2004
 Chapter 3 Geometric Representations and Transformations Steven M. LaValle University of Illinois Copyright 2004 62 S. M. LaValle: Planning Algorithms Chapter 3 Geometric Representations and Transformations
Chapter 3 Geometric Representations and Transformations Steven M. LaValle University of Illinois Copyright 2004 62 S. M. LaValle: Planning Algorithms Chapter 3 Geometric Representations and Transformations
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
On Multiple Moving Objects 1. Michael Erdmann 2 and Tomfis Lozano-P6rez 2
 Algorithmica (1987) 2:477-521 Algorithmica 9 1987 Springer-Verlag New York lnc. On Multiple Moving Objects 1 Michael Erdmann 2 and Tomfis Lozano-P6rez 2 Abstract. This paper explores the motion-planning
Algorithmica (1987) 2:477-521 Algorithmica 9 1987 Springer-Verlag New York lnc. On Multiple Moving Objects 1 Michael Erdmann 2 and Tomfis Lozano-P6rez 2 Abstract. This paper explores the motion-planning
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Trajectory Planning for Automatic Machines and Robots
 Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Robot Motion Planning Using Generalised Voronoi Diagrams
 Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Motion Planning. Chapter Motion Planning Concepts. by Lydia E. Kavraki and Steven M. LaValle Configuration Space
 Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots
 Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
Probabilistic roadmaps for efficient path planning
 Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Mobile Robot Kinematics
 Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
CHAPTER SIX. the RRM creates small covering roadmaps for all tested environments.
 CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
ON THE DUALITY OF ROBOT AND SENSOR PATH PLANNING. Ashleigh Swingler and Silvia Ferrari Mechanical Engineering and Materials Science Duke University
 ON THE DUALITY OF ROBOT AND SENSOR PATH PLANNING Ashleigh Swingler and Silvia Ferrari Mechanical Engineering and Materials Science Duke University Conference on Decision and Control - December 10, 2013
ON THE DUALITY OF ROBOT AND SENSOR PATH PLANNING Ashleigh Swingler and Silvia Ferrari Mechanical Engineering and Materials Science Duke University Conference on Decision and Control - December 10, 2013