CITS 4402 Computer Vision
|
|
|
- Arron Lawson
- 6 years ago
- Views:
Transcription
1 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching
2 Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques on 3D data ICP Algorithm Keypoint detection in 3D data 3D feature extraction and matching The University of Western Australia 2


3 Laser stripe scanner A laser stripe is moved over the object The stripe is orthogonal to the epipolar lines and helps resolve correspondence Can use one camera and one laser stripe projector 3D model Real object The University of Western Australia 3


4 Minolta Vivid 3D scanner uses laser stripe Available in CSSE Fine scan resolution is 640x480 with 1mm resolution Fast scan is 320x240 but scans in less than a second The University of Western Australia 4

5 Structured light Multiple stripes or other 2D patterns are simultaneously projected Stripes are coded through Time coding Colour coding Other spatial patters Random pattern Kinect 1 projects spatial infra-red random pattern The University of Western Australia 5


6 Sample 3D data from Kinect 1 Comparing with other scanners The University of Western Australia 6


7 Full 3D reconstruction with Kinect 1 Rotate object Get 30 fps Integrate Kinect SDK is available OpenCV + Matlab The University of Western Australia 7
 after reflection from an object Measure distance in that directions")

8 Laser time of flight scanner Fire laser and measure its time delay (phase shift) after reflection from an object Measure distance in that directions Kinect 2 is an example Has better spatial resolution (number of points) Has better depth resolution than Kinect 1 The University of Western Australia 8
9 Representing 3D data Raw 3D data is basically a collection of points called pointcloud Pointcloud is an 3xN matrix of the X, Y, Z coordinates of the N scene points that were scanned A pointcloud can be visualized using rendering softwares based on OpenGL Pointclouds are converted to mesh by connecting nearest points to form triangles (or polygons) Polygons are filled and shaded to render surfaces The University of Western Australia 9

10 Pointcloud of UWA Winthrop Hall Scanned with laser time of flight scanner The University of Western Australia 10

11 Basic representation of 3D data The University of Western Australia 11
12 Pointcloud example Matlab: plot3.m mesh = readplyfile( c:\chef.ply ); X = mesh.vertices(:,1); Y = mesh.vertices(:,2); Z = mesh.vertices(:,3); plot3(x,y,z,. ); axis equal; rotate3d; The University of Western Australia 12
13 Mesh example mesh = readplyfile( c:\chef.ply ); X = mesh.vertices(:,1); Y = mesh.vertices(:,2); Z = mesh.vertices(:,3); trimesh(mesh.triangles,x,y,z); axis equal; rotate3d; The University of Western Australia 13
; trisurf(mesh.")
14 Surface mesh = readplyfile( c:\chef.ply ); X = mesh.vertices(:,1); Y = mesh.vertices(:,2); Z = mesh.vertices(:,3); trisurf(mesh.triangles,x,y,z); axis equal; rotate3d; The University of Western Australia 14
15 Rendering as a shaded surface M = calcmeshnormals(mesh); N = M.vertexNormals; [~,p,~]=cart2sph(n(:,1),n(:,2),n(:,3)); trisurf(mesh.triangles,x,y,z,p); axis equal; shading interp; colormap gray; rotate3d; The University of Western Australia 15
16 How to make full 3D models? Problem: A scanner can only see part of the object s surface A single view scan is also referred to as 2.5D Strictly speaking, a single Kinect frame is 2.5D Solution: Scan the object multiple times from different angles and integrate Before we can integrate scans, we need to register/align them The University of Western Australia 16
17 Iterative Closest Point (ICP) algorithm Given two pointclouds P 1 and P 2, we want to rotate and translate P 2 so that it aligns with P 1 For each point in P 2, find its nearest point in P 1 (Correspondences) Remove incompatible points based on Distance, colour, normals, curvatures, boundary points Let Y P 2 and X P 1 be the remaining set of corresponding points Minimize RY + t X 2 where R is the rotation matrix and t is the translation vector The University of Western Australia 17
18 ICP algorithm Computationally demanding Find correspondences X and Y Subtract mean: Y = Y m, and X = X n Perform SVD: USV T = Y X T R = VU T (Ensure that det R = 1) t = n Rm Repeat until RY + t X 2 < ε Need minimum of 3 points to solve for R The University of Western Australia 18
19 ICP algorithm limitations The two pointclouds should be close, otherwise ICP will fail If they are not close, the first set of correspondences must be provided Manually Or by automatic feature matching Can still fail when The surface is rotationally symmetric The surface has repetitive structure The University of Western Australia 19


20 ICP registration example Corresponding points Three corresponding points marked to find initial coarse registration After ICP registration The University of Western Australia 20

 The University of Western")
21 Full 3D model construction Register multiple scans Integrate them to form a single smooth surface (outside the scope of this lecture) The University of Western Australia 21

22 ICP applications 1. Surface alignment/registration 2. Surface matching The final value of error ϵ is used to decide how well the two surfaces match Advantages Partial surface matching Inbuilt correction of alignment Drawbacks Computationally expensive The University of Western Australia 22
23 Mesh representation Many scanners output pointclouds as 4 matrices of the same size X matrix containing the x-coordinates at each pixel location Y matrix containing the y-coordinates at each pixel location Z matrix containing the z-coordinates at each pixel location M matrix of binary values with 1 at valid and 0 at invalid pixel Kinect 2 gives XYZ RGB pointcloud Since the pointcloud is arranged on a planar grid, a simple 2D delaunay triangulation of the XY coordinates will give you the mesh Delaunay triangulation connects nearest three points validpixels = find(m(:)); triangles = delaunay(x(validpixels), Y(validPixels)); Vertices = [X(validPixels) Y(validPixels) Z(validPixels)]; Remember to remove elongated triangles The University of Western Australia 23
 that make a triangle The University of Western Australia")
24 Example: Pointcloud to mesh conversion The triangles variable will contain sets of 3 points (their index numbers) that make a triangle The University of Western Australia 24
25 2D-grid based representations of pointclouds Depth image: Depth of every point from a plane The Z matrix can be regarded as the depth image For actual depth image, need to resample on a uniform XY grid We can display/visualize it using image visualization (imshow, imagesc) Need to scale Z values so that they are Range image: Range of every point from the camera center The difference is small and they are used interchangeably in the literature Kinect 2 can also give depth images The University of Western Australia 25

26 Example depth images Bright pixels mean close points The University of Western Australia 26

27 Principal curvatures Surface normal at a point Maximum curvature κ 1 Minimum curvature κ 2 Principal directions Gaussian curvature κ 1 κ 2 Average curvature κ 1 + κ 2 /2 The University of Western Australia 27

28 More 2D-grid based representations of pointclouds We can derive many other 2D-grid based representations from the X, Y, Z matrices The normal vector n x, n y, n z T gives 3 images. The normal vector θ, φ, r T gives another 2 images. Minimum and maximum curvatures give another 2 images The University of Western Australia 28

29 Applying 2D Gaussian on the Z-image 7x7 window and σ = 4 Elongated triangles after delaunay triangulation The University of Western Australia 29

30 Need to remove spikes and fill holes before smoothing Smoothing with a median filter The University of Western Australia 30




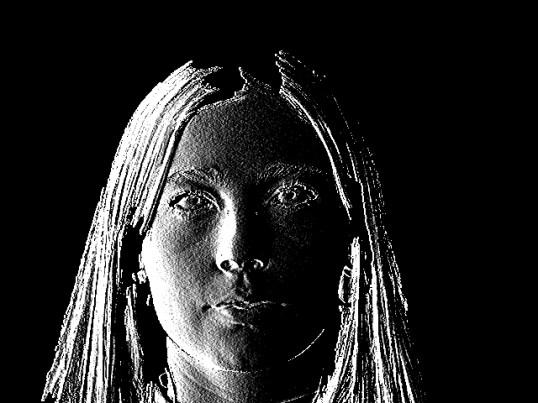
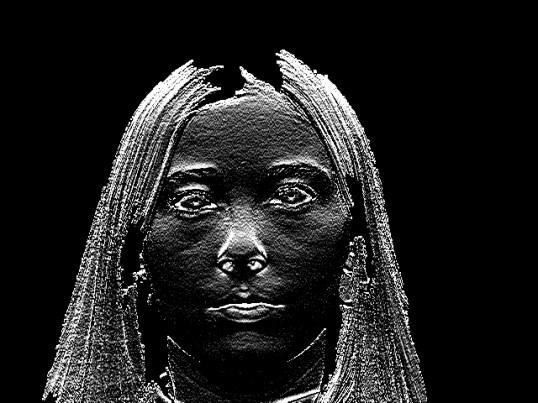
31 Gradient images from Z-image Range image X gradient Y gradient The University of Western Australia 31





32 Detecting features in 3D data Train Haar classifier on gradient images Detect features in real-time The University of Western Australia 32

33 Spherical feature Sum the number of points inside spheres of increasing radii Easily implemented by histogramming only the radii values in spherical coordinates 1-D feature The University of Western Australia 33

34 Spin images (Johnson & Hebert, PAMI 99) Two steps 1. Use a point and its normal to define an image plane 2. Spin the image plane and sum the points passing through each bin/pixel Easily implemented by histogramming in cylindrical coordinates. Download code from The University of Western Australia 34
35 Tensor feature Define a 3D grid over the mesh Need three non-coplanar points OR two points and their normals Find the area of intersection with each cubelet 3D feature Mian et al, 3D object recognition and segmentation in cluttered scenes, PAMI 2005 The University of Western Australia 35
36 Feature comparison Spherical feature does not need any reference vector or coordinate basis Most robust Less descriptive Spin image needs a reference normal vector Medium robust Medium descriptive Tensor feature needs a complete 3D reference frame Least robust Most descriptive The University of Western Australia 36
37 Shape index SI = 2 π arctan κ 2 + κ 1 κ 2 + κ 1 cup rut saddle ridge cap SI cup trough rut saddle rut saddle ridge dome cap J. Koenderink and A. van Doorn, ``The internal representation of solid shape with respect to vision,'' Biological Cybernetics, The University of Western Australia 37
38 Shape Index image Can organize SI values into an image And use standard image matching P Szeptycki et al., "A coarse-to-fine curvature analysis-based rotation invariant 3D face landmarking" BTAS The University of Western Australia 38

39 Keypoint detection in 3D images Similar to corner detection and LoG/DoG blob detection Need to detect interesting points To avoid feature extraction at every point Save computation All locations are not discriminative Does this give you an idea to find keypoints? The University of Western Australia 39
40 Keypoint detection in 3D images Can apply image based techniques on Z-image Problems Does not fully exploit the potential of 3D data 3D surfaces are smooth (corners and edges are subtle) Corners and edges are at boundary or at noisy locations (e.g. spikes) With rotation, the pixel values change in depth images move in conventional 2D images The University of Western Australia 40
41 Keypoint Quality (KPQ) : Feature detection in 3D pointclouds Given a point p, crop out a spherical region with radius r around it Let P be the 3xN matrix of N points inside the sphere Find its covariance matrix C = P m P m T Perform PCA: CV = DV Align the points on their principal axes: P = V(P m) Use the X, Y coordinates of the aligned points to find the ratio δ = If δ > threshold, accept the point as a keypoint max X min X max Y min Y OR λ 1 λ 2 > threshold The University of Western Australia 41
42 KPQ Intuition KPQ selects keypoints where the surface curvature is different in the two directions Unlike edge detection or Lucas Kanade where λ 1 λ 2 is preferred, in KPQ such points are not preferred as they lie on spherical or flat surfaces A unique coordinate basis cannot be defined at a point where λ 1 λ 2 because the principal directions are not unique or sensitive to noise The University of Western Australia 42

43 KPQ: Number of keypoints vs threshold The University of Western Australia 43

44 KPQ feature extraction A smooth surface is fitted to the points in P Depth values w.r.t. the center are vectorized and used as a feature We can align the corresponding texture to extract invariant features The University of Western Australia 44
45 KPQ: Automatic scale selection What should be the radius r i.e. the scale for keypoint detection and feature extraction? Perform scale space search Use different values and select the scale/radius r at which λ 1 /λ 2 is max Discard point where a max cannot be found The University of Western Australia 45


46 KPQ face recognition Similar faces will have more and spatially coherent matches Different faces will have fewer and spatially incoherent matches Correct match Incorrect match The University of Western Australia 46

47 KPQ scale invariant object recognition Match KPQ features to find objects in cluttered scenes at unknown scales Prune geometrically inconsistent matches The University of Western Australia 47

48 Scene completion and match verification Align the database model with the scene Verify the match ICP error Free space violation Occupied space violation ICP error should be small The aligned model should not block visible surfaces The aligned models should not cross over into other objects The University of Western Australia 48
49 Summarizing the 3D shape matching pipeline 1. Detect keypoints and their scale 2. Extract features at the keypoints (KPQ feature, spherical, spin image, tensor, SI, curvatures..) 3. Match features (l 2 norm, dot product,.) 4. Prune matches (remove geometrically impossible matches) 5. Verify matches (ICP, free/occupied space violation,..) 6. Output best match The University of Western Australia 49
50 Can we recognize actions? We know how to match objects in images We know how to match objects in 3D data What about video? Can we recognize an action rather than the object/person performing that action? Space-time matching or spatiotemporal matching Space-time SIFT has been proposed but we will focus on 3D data The University of Western Australia 50
51 3D spatiotemporal matching Sometimes referred to as 4D in the literature Motivations 3D data is preferred for action recognition because it can capture all 6 degrees of freedom (3 rotations and 3 translations) 3D avoids texture which can cause errors in action recognition Kinect 1 and Kinect 2 are available at a very low cost The University of Western Australia 51

52 Human action recognition from Kinect skeleton data Kinect gives depth image and skeleton data at 30 frames/second Can be used for action recognition Microsoft research dataset The University of Western Australia 52

53 Histogram of Depth Gradients Recall Histogram of Oriented Gradients (HOG) HOG features can be extracted from gradient of depth images HOG Z x Z y Z t Skeleton displacement feature The University of Western Australia 53

54 Generating novels views from 3D models Can generate novel views by rotating the object and re-rendering it Can generate novel illuminations The University of Western Australia 54
55 Demos See recording of lecture 13 for the following demos SIFT matching Single image based height measurement Microsoft Kinect 2 sensor 3D Shape capture Body skeleton tracking Infra-red capture The University of Western Australia 55
56 Summary Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques on 3D data ICP Algorithm Keypoint detection in 3D data 3D feature extraction and matching The University of Western Australia 56
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Keypoints Detection for Objects Recognition
 3D Keypoints Detection for Objects Recognition Ayet Shaiek 1, and Fabien Moutarde 1 1 Robotics laboratory (CAOR) Mines ParisTech 60 Bd St Michel, F-75006 Paris, France Abstract - In this paper, we propose
3D Keypoints Detection for Objects Recognition Ayet Shaiek 1, and Fabien Moutarde 1 1 Robotics laboratory (CAOR) Mines ParisTech 60 Bd St Michel, F-75006 Paris, France Abstract - In this paper, we propose
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
On the Repeatability and Quality of Keypoints for Local Feature-based 3D Object Retrieval from Cluttered Scenes
 International Journal of Computer Vision manuscript No. (will be inserted by the editor) On the Repeatability and Quality of Keypoints for Local Feature-based 3D Object Retrieval from Cluttered Scenes
International Journal of Computer Vision manuscript No. (will be inserted by the editor) On the Repeatability and Quality of Keypoints for Local Feature-based 3D Object Retrieval from Cluttered Scenes
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Data Representation in Visualisation
 Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method
 The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
CPSC / Texture Mapping
 CPSC 599.64 / 601.64 Introduction and Motivation so far: detail through polygons & materials example: brick wall problem: many polygons & materials needed for detailed structures inefficient for memory
CPSC 599.64 / 601.64 Introduction and Motivation so far: detail through polygons & materials example: brick wall problem: many polygons & materials needed for detailed structures inefficient for memory
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Technical Report No D Object Recognition using Local Shape Descriptors. Mustafa Mohamad
 Technical Report No. 2013-614 3D Object Recognition using Local Shape Descriptors Mustafa Mohamad School of Computing Queen s University Kingston, Ontario, Canada mustafa@cs.queensu.ca November 7, 2013
Technical Report No. 2013-614 3D Object Recognition using Local Shape Descriptors Mustafa Mohamad School of Computing Queen s University Kingston, Ontario, Canada mustafa@cs.queensu.ca November 7, 2013
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Automatic 3D Face Detection, Normalization and Recognition
 Automatic 3D Face Detection, Normalization and Recognition Ajmal Mian, Mohammed Bennamoun and Robyn Owens School of Computer Science and Software Engineering The University of Western Australia 35 Stirling
Automatic 3D Face Detection, Normalization and Recognition Ajmal Mian, Mohammed Bennamoun and Robyn Owens School of Computer Science and Software Engineering The University of Western Australia 35 Stirling
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Texture. Texture Mapping. Texture Mapping. CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering
 AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
Geometric Modeling Summer Semester 2012 Point-Based Modeling
 Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
CSL 859: Advanced Computer Graphics. Dept of Computer Sc. & Engg. IIT Delhi
 CSL 859: Advanced Computer Graphics Dept of Computer Sc. & Engg. IIT Delhi Point Based Representation Point sampling of Surface Mesh construction, or Mesh-less Often come from laser scanning Or even natural
CSL 859: Advanced Computer Graphics Dept of Computer Sc. & Engg. IIT Delhi Point Based Representation Point sampling of Surface Mesh construction, or Mesh-less Often come from laser scanning Or even natural
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list