Processing 3D Surface Data
|
|
|
- Vincent Higgins
- 6 years ago
- Views:
Transcription
1 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1





2 3D surface data... where from? Iso-surfacing from scalar volumes 3D environment & object captures Marching Cubes stereo vision & laser range scanners Today : Algorithms for processing 3D meshes 3D Surfaces 2
3 Processing 3D data 1) Capture the data (by stereo vision, range scanner) 2) Registration (if the data was captured by multiple attempts) 3) Adding the topology : converting to mesh data 4) Smoothing 5) Decimation 6) Remeshing 3D Surfaces 3
 Feature Identification")
 Correspondence")

 3) Triangulation")

4 Stereo Vision : 3 key stages 1) Feature Identification identify image features in each image 2) Correspondence Matching: find a set of consistent feature correspondences (left image right image) 3) Triangulation triangulate from known camera positions recover 3D depth information 3D Surfaces 4

![representation) [Matthies, Szeliski, Kanade 88] Result :](/docs-images/78/78641877/images/5-1.jpg "depth map (2D structured grid) knowledge of 3D depth and")

5 Result : Dense Stereo Matching Input : Image x 2 Result : depth map representation Result : novel view (point cloud representation) [Matthies, Szeliski, Kanade 88] Result : depth map (2D structured grid) knowledge of 3D depth and colour (from input) in each cell Problems : poor matches = poor 3D information e.g. right hand side of example 3D Surfaces 5



 Results :")

6 Dense Stereo Matching : Face 2 x 6 mega-pixel digital SLR cameras Commercial 3D stereo software ( Results : 6 mega-pixel depth map / VRML 3D surface mesh model 3D Surfaces 6
7 Dense Stereo Matching Advantages passive technique uses only image cameras : no expensive sensors Limitations accurate prior calibration of cameras required fails on textureless surfaces noise: effects matching, produces errors lighting affects images (e.g. specular highlights) results : often sparse incomplete surfaces Another solution Active techniques 3D Surfaces 7
 Software fits a skeleton character into the point cloud data http://www.youtube.com/watch?")
8 Microsoft KINECT Estimating the depth from projected structured infra-red light Practical ranging limit of m ( ft) Software fits a skeleton character into the point cloud data 3D Surfaces 8
9 3D capture : laser range scanning Active depth sensing using laser beam signal Direct, accurate 3D scene information unambiguous measurement (unlike stereo) Limitations hidden surfaces (2½D) dark/shiny objects do not scan well expensive hardware dense 3D models for rendering Environment Laser Scanner 3D Surfaces 9




10 Great Buddha Project in Japan Capturing took 3 weeks x 2 trips x 10 students/staff 3D Surfaces 10
11 Processing 3D data 1) Capture the data (by stereo vision, range scanner) 2) Registration (if the data was captured by multiple attempts) 3) Adding the topology : converting to mesh data 4) Smoothing 5) Decimation 6) Remeshing 3D Surfaces 11


12 3D Registration Producing larger 3D models by combining multiple range scans from different viewpoints 3D Surfaces 12

 A")

 &")

13 Registration ICP algorithm Example : registration of 3D model parts (toy cow) A Input: point clouds acquired viewpoints from non-aligned (from 3D range scanner) & initial estimation of registration Output: Transformation B 3D Surfaces 13
14 Registration ICP algorithm Problem : merging of 3D point clouds from different, unaligned orientations common in large scale range scanning (e.g. Mosque) Solution : iterative estimation of rigid 3D transform between point clouds [ Iterative Closest Point (ICP) Besl / Mckay '92] ICP algorithm: for point clouds A & B align A & B using initial estimate of 3D transform until distance between matched points < threshold matched points = N closest point pairs between A & B estimate transformation B A between matched pairs apply transformation to B 3D Surfaces 14
15 Processing 3D data 1) Capture the data (by stereo vision, range scanner) 2) Registration (if the data was captured by multiple attempts) 3) Adding the topology : converting to mesh data 4) Smoothing 5) Decimation 6) Remeshing 3D Surfaces 15
 Delaunay Triangulation For surface result: 2½D data sets only The data needs")
 to build surface 3D")
16 Point Clouds Surface Meshes Input : unstructured 3D points (point cloud) Output : polygonal data set Multiple techniques available (surface mesh) Delaunay Triangulation For surface result: 2½D data sets only The data needs to be projected onto a plane Iso-surface based Techniques define pseudo-implicit functional 3D space f(x,y,z) = c where c is distance to nearest 3D input point use iso-surface technique (Marching Cubes) to build surface 3D Surfaces 16
17 Delaunay Triangulation Given the point cloud, compute the triangulation such that none of the other points come into the circumcircle of each triangles Can avoid skinny triangles 3D Surfaces 17
18 Delaunay Triangulation: Flip Algorithm Looking at two triangles ABD and BCD with the common edge BD, if the sum of the angles α and γ is less than or equal to 180, the triangles meet the Delaunay condition. 3D Surfaces 18
19 Incremental Delaunay Triangulation Repeatedly add one vertex at a time (p) Find the triangle T that contains p Split T in three For each edge of T, apply the flip algorithm. Repeat 3D Surfaces 19

20 Surface Detail : very fine 0.25mm scan resolution. How can we visualise this fine detail? 3D Surfaces 20
. Chisel marks can be seen but can this be improved 3D Surfaces 21")
21 Rendering : Lighting Surface Detail Surface detail illuminated using diffuse (left) and specular (right) lighting 3D Model of Michaelangelo's Unfinished Statue of St. Matthew (Stanford). Chisel marks can be seen but can this be improved 3D Surfaces 21
22 Rendering : Lighting Surface Detail Requirement: visualise fine surface detail here : interested in how work was carved, possibly what kind of chisel was used need to visualise fine detail of chisel marks on surface Conventional Lighting Choices : Not Good enough to see the details Diffuse : lighting has smooth curve with surface normal Specular : steeper lighting gradient but only locally only see brightness change at steep angles to light source need to catch the light to effectively see changes 3D Surfaces 22
23 Alternative : Accessibility Shading Shade the surface according to the size of the largest sphere that can touch the surface (i.e. how accessible it is). - Darkens inaccessible parts of model. Gives an objective view of the surface independent of choice of illumination angle (objective shading). - Light source shading Lights surface in proportion to local granularity of detail ideal for visualisation of fine surface scans 3D Surfaces 23



24 Example : chisel analysis Accessibility shading clear detail Specular shading less clear detail From effective visualisation further historical conclusions on chisel type can be made by bringing information out of data 3D Surfaces 24
25 Processing 3D data 1) Capture the data (by stereo vision, range scanner) 2) Registration (if the data was captured by multiple attempts) 3) Adding the topology : converting to mesh data 4) Smoothing 5) Decimation 6) Remeshing 3D Surfaces 25
26 Mesh Smoothing - 1 Surface Noise : surfaces from stereo vision and (large scale) laser scanning often contain noise removes noise, improves uniform curvature helps decimation surface Solution: Laplacian mesh smoothing modifies geometry of mesh topology unchanged reduces surface curvature and removes noise 3D Surfaces 26
27 Mesh Smoothing - 2 Iterative smoothing approach At each iteration i move each vertex Vi,j towards mean position of neighbouring vertices, N(Vi,j), by λ Vi+1,j = Vi,j + λn(vi,j) λ N(V)i Vi λ = iterations 100 iterations 3D Surfaces 27


28 Mesh Smoothing - 3 Reduces high-frequency mesh information Decimate.tcl removes noise but also mesh detail! Iterations = 100; λ = 0.1 Limitations : loss of detail, mesh shrinkage enhancements : feature-preserving smoothing & non-shrinking iterative smoothing feature points can be anchored to prevent movement in mesh smoothing (detail preservation) 3D Surfaces 28
29 Handling Large Polygonal Datasets Large Surface Meshes Marching Cubes : voxel dataset of 5123 produces a typical iso-surface of 1-3 million triangles Laser Scanning : datasets in 10s millions of triangles Problem : lots to render! Solution : polygon reduction sub-sampling : simple sub-sampling is bad! decimation : intelligent sub-sampling by optimising mesh 3D Surfaces 29

 sub-sampling level = 5 3D Surfaces")
30 Basic Sub-sampling Basic uniform sub-sampling loss of detail / holes / poor surface quality Marching Cubes surface example : sub-sampling level = 3 (take every nth sample) sub-sampling level = 5 3D Surfaces 30


31 Mesh Decimation Triangles = Mesh Decimation : intelligent mesh pruning Triangles = Triangles = 3303 remove redundancy in surface mesh representation 3D Surfaces 31

32 Decimation of a skeleton 3D Surfaces 32

33 Decimation : removing redundancy Original terrain data of crater (point cloud) 90% Decimated mesh Original triangulation of point cloud very dense Many triangles approximate same planar area merge co-planar triangles Triangles in areas of high-curvature maintained 3D Surfaces 33
34 Decimation : Schroeder's Method Operates on triangular meshes 3D grid of regular triangular topology triangles are simplex : reduce other topologies to triangular Schroeder's Decimation Algorithm: [Schroeder et al. '92] until stopping criteria reached for each mesh vertex classify vertex if classification suitable for decimation estimate error resulting from removal if error < threshold remove vertex triangulate over resulting mesh hole 3D Surfaces 34
35 Schroeder's Method : vertex classification Vertex classified into 5 categories: Simple Complex Boundary Simple : surrounded by complete cycle of triangles, each edge used by exactly 2 triangles. Complex : if edges not used by only 2 triangles in cycle Boundary : lying on mesh boundary(i.e. external surface edge) 3D Surfaces 35
36 Schroeder's Method : vertex classification simple vertices are further classified {simple interior edge corner} vertex based on local mesh geometry feature edge : where surface normal between adjacent triangles is greater than specified feature angle Simple Interior Edge interior edge : a simple vertex used by 2 feature edges corner point : vertex used by 1, 3 or more feature edges Corne r θ 3D Surfaces 36
37 Schroeder's Method : decimation criterion Remove : simple vertices that are not corner points i.e. leave important or complex mesh features Simple vertex mesh considered locally flat : as no feature edges estimate error from removing this vertex error = distance d of vertex to average plane through neighbours d Represents the error that removal of the vertex would introduce into the mesh. Average plane through surrounding vertices. 3D Surfaces 37
38 Schroeder's Method : decimation criterion When the vertex is close to the edge vertex point considered to lie on edge error = distance d from vertex to edge resulting from removal d d Boundary Decimation Criterion : vertex removal if error d < threshold then remove Interior vertex & all associated triangles removed hole 3D Surfaces 38
39 Schroeder's Method: re-triangulation Hole must be re-triangulated use less triangles resulting boundary is in 3D space 3D triangulation Recursive Division Triangulation Strategy choose a split plane (in 3D), split into two sub-loops check it is valid all points in each sub-loop lie on opposite sides of the plane. 1st plane If failure, do not remove the vertex Form triangle 2nd plane choose new split plane and recursively until all sub-loops contain 3 points This is helpful for dividing concave polygons form triangles 3D Surfaces 39
40 Decimation : stopping criteria Option 1 : maximum error max. error that can be suffered in mesh due to removal Option 2 : target number of triangles number of triangles required in resulting decimation explicitly specifying the representational complexity of the resulting mesh Combination : combine 1 & 2 stop when either is reached measure of maintaining mesh quality (as a representation of original surface form) aims for target reduction in triangles but keeps a bound on loss of quality 3D Surfaces 40

 Advantages : less to store & less to render Dis-advantages : less detail 3D Surfaces 41")
41 Decimation Discussion Improve Efficiency of Representation remove redundancy within some measure of error Decimation : Mesh Compression / Polygon Reduction generate smaller mesh representation information is permanently removed lossy compression same concept as lossy image compression (e.g. JPEG) Advantages : less to store & less to render Dis-advantages : less detail 3D Surfaces 41
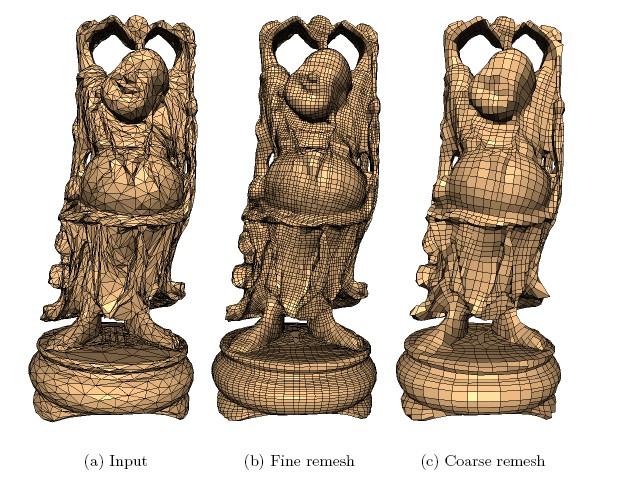
42 Remeshing & Simplification After the decimation, the triangle shapes can be very skewed. We may prefer a more uniform point distribution Also sometimes we prefer quadmeshes for FEM simulation 3D Surfaces 42

43 Harmonic Scalar Fields 2 u= 0 s. t. u i =c i Laplace equation boundary conditions A u that satisfies this equation is called harmonic function u produces a smooth transition between ui s. When heat diffuses over some material, it follows the Laplace equation 3D Surfaces 43
44 Using Harmonic fields for computer graphics By defining a harmonic function over the surface of a 3D object, we can produce a scalar field The gradient line always guides from the lowest value to the highest value No local minima This can be used for various purposes, such as Re-meshing Simplification 3D Surfaces 44

45 Quadrangulation process 3D Surfaces 45

46 Remeshing & Simplification by Harmonic Scalar Field Using the harmonic scalar field and the isoparametric lines, we can re-mesh the object By reducing the sampling rate, we can conduct simplification 3D Surfaces 46


47 More results 3D Surfaces 47

48 Other applications: Path-planning 3D Surfaces 48
49 Summary Modelling Algorithms for 3D surface data Triangulation : Delaunay & iso-surfacing Decimation : Schroeder's Method Registration : Iterative Closest Point (ICP) Smoothing : Laplacian mesh smoothing Remeshing : Using the Laplace equation Readings Shroeder et al. Decimation of Triangle Meshes, SIGGRAPH 92 Miller, Efficient algorithms for local and global accessibility shading, SIGGRAPH 94 Harmonic functions for quadrilateral remeshing of arbitrary manifolds Dong et al. '2004 3D Surfaces 49
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Volume Illumination, Contouring
 Volume Illumination, Contouring Computer Animation and Visualisation Lecture 0 tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Overview -
Volume Illumination, Contouring Computer Animation and Visualisation Lecture 0 tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Overview -
Scalar Algorithms: Contouring
 Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
Volume Illumination and Segmentation
 Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Mesh Decimation Using VTK
 Mesh Decimation Using VTK Michael Knapp knapp@cg.tuwien.ac.at Institute of Computer Graphics and Algorithms Vienna University of Technology Abstract This paper describes general mesh decimation methods
Mesh Decimation Using VTK Michael Knapp knapp@cg.tuwien.ac.at Institute of Computer Graphics and Algorithms Vienna University of Technology Abstract This paper describes general mesh decimation methods
Contours & Implicit Modelling 1
 Contouring & Implicit Modelling Visualisation Lecture 8 Institute for Perception, Action & Behaviour School of Informatics Contours & Implicit Modelling 1 Brief Recap Contouring Implicit Functions lecture
Contouring & Implicit Modelling Visualisation Lecture 8 Institute for Perception, Action & Behaviour School of Informatics Contours & Implicit Modelling 1 Brief Recap Contouring Implicit Functions lecture
Contours & Implicit Modelling 4
 Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
Applications. Oversampled 3D scan data. ~150k triangles ~80k triangles
 Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Data Representation in Visualisation
 Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Mesh Decimation. Mark Pauly
 Mesh Decimation Mark Pauly Applications Oversampled 3D scan data ~150k triangles ~80k triangles Mark Pauly - ETH Zurich 280 Applications Overtessellation: E.g. iso-surface extraction Mark Pauly - ETH Zurich
Mesh Decimation Mark Pauly Applications Oversampled 3D scan data ~150k triangles ~80k triangles Mark Pauly - ETH Zurich 280 Applications Overtessellation: E.g. iso-surface extraction Mark Pauly - ETH Zurich
A Developer s Survey of Polygonal Simplification algorithms. CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005
 A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
Volume Illumination & Vector Field Visualisation
 Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Geometry Processing & Geometric Queries. Computer Graphics CMU /15-662
 Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Mesh Repairing and Simplification. Gianpaolo Palma
 Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Geometric Modeling. Mesh Decimation. Mesh Decimation. Applications. Copyright 2010 Gotsman, Pauly Page 1. Oversampled 3D scan data
 Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Copyright 2010 Gotsman, Pauly Page 1 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies
Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Copyright 2010 Gotsman, Pauly Page 1 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies
Volume Illumination. Visualisation Lecture 11. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3/1/2010. Acceleration Techniques V1.2. Goals. Overview. Based on slides from Celine Loscos (v1.0)
") Acceleration Techniques V1.2 Anthony Steed Based on slides from Celine Loscos (v1.0) Goals Although processor can now deal with many polygons (millions), the size of the models for application keeps on
Acceleration Techniques V1.2 Anthony Steed Based on slides from Celine Loscos (v1.0) Goals Although processor can now deal with many polygons (millions), the size of the models for application keeps on
Orthogonal Projection Matrices. Angel and Shreiner: Interactive Computer Graphics 7E Addison-Wesley 2015
 Orthogonal Projection Matrices 1 Objectives Derive the projection matrices used for standard orthogonal projections Introduce oblique projections Introduce projection normalization 2 Normalization Rather
Orthogonal Projection Matrices 1 Objectives Derive the projection matrices used for standard orthogonal projections Introduce oblique projections Introduce projection normalization 2 Normalization Rather
Mesh Processing Pipeline
 Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
CGAL. Mesh Simplification. (Slides from Tom Funkhouser, Adam Finkelstein)
") CGAL Mesh Simplification (Slides from Tom Funkhouser, Adam Finkelstein) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 In a nutshell Problem: Meshes have too many polygons for storage, rendering,
CGAL Mesh Simplification (Slides from Tom Funkhouser, Adam Finkelstein) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 In a nutshell Problem: Meshes have too many polygons for storage, rendering,
Isosurface Rendering. CSC 7443: Scientific Information Visualization
 Isosurface Rendering What is Isosurfacing? An isosurface is the 3D surface representing the locations of a constant scalar value within a volume A surface with the same scalar field value Isosurfaces form
Isosurface Rendering What is Isosurfacing? An isosurface is the 3D surface representing the locations of a constant scalar value within a volume A surface with the same scalar field value Isosurfaces form
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Final Project, Digital Geometry Processing
 Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Shape and Appearance from Images and Range Data
 SIGGRAPH 2000 Course on 3D Photography Shape and Appearance from Images and Range Data Brian Curless University of Washington Overview Range images vs. point clouds Registration Reconstruction from point
SIGGRAPH 2000 Course on 3D Photography Shape and Appearance from Images and Range Data Brian Curless University of Washington Overview Range images vs. point clouds Registration Reconstruction from point
Mesh Simplification. Mesh Simplification. Mesh Simplification Goals. Mesh Simplification Motivation. Vertex Clustering. Mesh Simplification Overview
 Mesh Simplification Mesh Simplification Adam Finkelstein Princeton University COS 56, Fall 008 Slides from: Funkhouser Division, Viewpoint, Cohen Mesh Simplification Motivation Interactive visualization
Mesh Simplification Mesh Simplification Adam Finkelstein Princeton University COS 56, Fall 008 Slides from: Funkhouser Division, Viewpoint, Cohen Mesh Simplification Motivation Interactive visualization
Design Intent of Geometric Models
 School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Auckland University 15th September 2004; Version 1.1 Design Intent
School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Auckland University 15th September 2004; Version 1.1 Design Intent
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Department of Computer Engineering, Middle East Technical University, Ankara, Turkey, TR-06531
 INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
Manipulating the Boundary Mesh
 Chapter 7. Manipulating the Boundary Mesh The first step in producing an unstructured grid is to define the shape of the domain boundaries. Using a preprocessor (GAMBIT or a third-party CAD package) you
Chapter 7. Manipulating the Boundary Mesh The first step in producing an unstructured grid is to define the shape of the domain boundaries. Using a preprocessor (GAMBIT or a third-party CAD package) you
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Previously... contour or image rendering in 2D
 Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Surface Simplification Using Quadric Error Metrics
 Surface Simplification Using Quadric Error Metrics Authors: Michael Garland & Paul Heckbert Presented by: Niu Xiaozhen Disclaimer: Some slides are modified from original slides, which were designed by
Surface Simplification Using Quadric Error Metrics Authors: Michael Garland & Paul Heckbert Presented by: Niu Xiaozhen Disclaimer: Some slides are modified from original slides, which were designed by
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Modeling: Surfaces
 CS 430/536 Computer Graphics I 3D Modeling: Surfaces Week 8, Lecture 16 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/536 Computer Graphics I 3D Modeling: Surfaces Week 8, Lecture 16 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
Interpolation using scanline algorithm
 Interpolation using scanline algorithm Idea: Exploit knowledge about already computed color values. Traverse projected triangle top-down using scanline. Compute start and end color value of each pixel
Interpolation using scanline algorithm Idea: Exploit knowledge about already computed color values. Traverse projected triangle top-down using scanline. Compute start and end color value of each pixel
MULTI-PEAK RANGE IMAGING FOR ACCURATE 3D RECONSTRUCTION OF SPECULAR OBJECTS. John Park and Avinash C. Kak
 MULTI-PEAK RANGE IMAGING FOR ACCURATE 3D RECONSTRUCTION OF SPECULAR OBJECTS John Park and Avinash C. Kak Robot Vision Laboratory, Purdue University 185 EE Building, West Lafayette, IN. 47907-185 {jpark,kak}@purdue.edu
MULTI-PEAK RANGE IMAGING FOR ACCURATE 3D RECONSTRUCTION OF SPECULAR OBJECTS John Park and Avinash C. Kak Robot Vision Laboratory, Purdue University 185 EE Building, West Lafayette, IN. 47907-185 {jpark,kak}@purdue.edu
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment
 3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment Özgür ULUCAY Sarp ERTÜRK University of Kocaeli Electronics & Communication Engineering Department 41040 Izmit, Kocaeli
3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment Özgür ULUCAY Sarp ERTÜRK University of Kocaeli Electronics & Communication Engineering Department 41040 Izmit, Kocaeli
Level of Details in Computer Rendering
 Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary
 Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary Master s Project Tanja Munz Master of Science Computer Animation and Visual Effects 24th August, 2015 Abstract
Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary Master s Project Tanja Munz Master of Science Computer Animation and Visual Effects 24th August, 2015 Abstract
Acquisition and Visualization of Colored 3D Objects
 Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Volume visualization. Volume visualization. Volume visualization methods. Sources of volume visualization. Sources of volume visualization
 Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Computing 3D Geometry Directly From Range Images
 Computing 3D Geometry Directly From Range Images Sarah F. Frisken and Ronald N. Perry Mitsubishi Electric Research Laboratories Geometry from Range Data A Classic Approach Subject Range images Range surfaces
Computing 3D Geometry Directly From Range Images Sarah F. Frisken and Ronald N. Perry Mitsubishi Electric Research Laboratories Geometry from Range Data A Classic Approach Subject Range images Range surfaces
Volume Rendering. Computer Animation and Visualisation Lecture 9. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Rendering Computer Animation and Visualisation Lecture 9 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Volume Data Usually, a data uniformly distributed
Volume Rendering Computer Animation and Visualisation Lecture 9 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Volume Data Usually, a data uniformly distributed
Polygon Meshes and Implicit Surfaces
 CSCI 420 Computer Graphics Lecture 9 Polygon Meshes and Implicit Surfaces Polygon Meshes Implicit Surfaces Constructive Solid Geometry [Angel Ch. 10] Jernej Barbic University of Southern California 1 Modeling
CSCI 420 Computer Graphics Lecture 9 Polygon Meshes and Implicit Surfaces Polygon Meshes Implicit Surfaces Constructive Solid Geometry [Angel Ch. 10] Jernej Barbic University of Southern California 1 Modeling
11/1/13. Polygon Meshes and Implicit Surfaces. Shape Representations. Polygon Models in OpenGL. Modeling Complex Shapes
 CSCI 420 Computer Graphics Lecture 7 and Constructive Solid Geometry [Angel Ch. 12.1-12.3] Jernej Barbic University of Southern California Modeling Complex Shapes An equation for a sphere is possible,
CSCI 420 Computer Graphics Lecture 7 and Constructive Solid Geometry [Angel Ch. 12.1-12.3] Jernej Barbic University of Southern California Modeling Complex Shapes An equation for a sphere is possible,
Polygon Meshes and Implicit Surfaces
 CSCI 420 Computer Graphics Lecture 9 and Constructive Solid Geometry [Angel Ch. 10] Jernej Barbic University of Southern California Modeling Complex Shapes An equation for a sphere is possible, but how
CSCI 420 Computer Graphics Lecture 9 and Constructive Solid Geometry [Angel Ch. 10] Jernej Barbic University of Southern California Modeling Complex Shapes An equation for a sphere is possible, but how
Mach band effect. The Mach band effect increases the visual unpleasant representation of curved surface using flat shading.
 Mach band effect The Mach band effect increases the visual unpleasant representation of curved surface using flat shading. A B 320322: Graphics and Visualization 456 Mach band effect The Mach band effect
Mach band effect The Mach band effect increases the visual unpleasant representation of curved surface using flat shading. A B 320322: Graphics and Visualization 456 Mach band effect The Mach band effect
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
What is visualization? Why is it important?
 What is visualization? Why is it important? What does visualization do? What is the difference between scientific data and information data Cycle of Visualization Storage De noising/filtering Down sampling
What is visualization? Why is it important? What does visualization do? What is the difference between scientific data and information data Cycle of Visualization Storage De noising/filtering Down sampling
Physically-Based Modeling and Animation. University of Missouri at Columbia
 Overview of Geometric Modeling Overview 3D Shape Primitives: Points Vertices. Curves Lines, polylines, curves. Surfaces Triangle meshes, splines, subdivision surfaces, implicit surfaces, particles. Solids
Overview of Geometric Modeling Overview 3D Shape Primitives: Points Vertices. Curves Lines, polylines, curves. Surfaces Triangle meshes, splines, subdivision surfaces, implicit surfaces, particles. Solids
Delaunay Triangulations
 Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo Surface Simplification Motivation Basic Idea of LOD Discrete LOD Continuous LOD Simplification Problem Characteristics
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo Surface Simplification Motivation Basic Idea of LOD Discrete LOD Continuous LOD Simplification Problem Characteristics
A Method of Automated Landmark Generation for Automated 3D PDM Construction
 A Method of Automated Landmark Generation for Automated 3D PDM Construction A. D. Brett and C. J. Taylor Department of Medical Biophysics University of Manchester Manchester M13 9PT, Uk adb@sv1.smb.man.ac.uk
A Method of Automated Landmark Generation for Automated 3D PDM Construction A. D. Brett and C. J. Taylor Department of Medical Biophysics University of Manchester Manchester M13 9PT, Uk adb@sv1.smb.man.ac.uk
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY
 13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Mesh and Mesh Simplification
 Slide Credit: Mirela Ben-Chen Mesh and Mesh Simplification Qixing Huang Mar. 21 st 2018 Mesh DataStructures Data Structures What should bestored? Geometry: 3D coordinates Attributes e.g. normal, color,
Slide Credit: Mirela Ben-Chen Mesh and Mesh Simplification Qixing Huang Mar. 21 st 2018 Mesh DataStructures Data Structures What should bestored? Geometry: 3D coordinates Attributes e.g. normal, color,
So far, we have considered only local models of illumination; they only account for incident light coming directly from the light sources.
 11 11.1 Basics So far, we have considered only local models of illumination; they only account for incident light coming directly from the light sources. Global models include incident light that arrives
11 11.1 Basics So far, we have considered only local models of illumination; they only account for incident light coming directly from the light sources. Global models include incident light that arrives
AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER
 AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER INTRODUCTION The DIGIBOT 3D Laser Digitizer is a high performance 3D input device which combines laser ranging technology, personal
AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER INTRODUCTION The DIGIBOT 3D Laser Digitizer is a high performance 3D input device which combines laser ranging technology, personal
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Alex Li 11/20/2009. Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk
 Alex Li 11/20/2009 Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk duction Overview of Lagrangian of Topological s Altering the Topology 2 Presents a method for accurately tracking the moving surface
Alex Li 11/20/2009 Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk duction Overview of Lagrangian of Topological s Altering the Topology 2 Presents a method for accurately tracking the moving surface
Watertight Planar Surface Reconstruction of Voxel Data
 Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION
 THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
10.1 Overview. Section 10.1: Overview. Section 10.2: Procedure for Generating Prisms. Section 10.3: Prism Meshing Options
 Chapter 10. Generating Prisms This chapter describes the automatic and manual procedure for creating prisms in TGrid. It also discusses the solution to some common problems that you may face while creating
Chapter 10. Generating Prisms This chapter describes the automatic and manual procedure for creating prisms in TGrid. It also discusses the solution to some common problems that you may face while creating
Parameterization. Michael S. Floater. November 10, 2011
 Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Computer Graphics Ray Casting. Matthias Teschner
 Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
CS 563 Advanced Topics in Computer Graphics QSplat. by Matt Maziarz
 CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
Extraction of Concise and Realistic 3-D Models from Real Data *
 Extraction of Concise and Realistic 3-D Models from Real Data * Andrew E. Johnson 1 Sing Bing Kang 2 Richard Szeliski 3 1 The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 aej@ri.cmu.edu
Extraction of Concise and Realistic 3-D Models from Real Data * Andrew E. Johnson 1 Sing Bing Kang 2 Richard Szeliski 3 1 The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 aej@ri.cmu.edu
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Parallel Physically Based Path-tracing and Shading Part 3 of 2. CIS565 Fall 2012 University of Pennsylvania by Yining Karl Li
 Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
Triangular Mesh Segmentation Based On Surface Normal
 ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
A Volumetric Method for Building Complex Models from Range Images
 A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
Delaunay Triangulations. Presented by Glenn Eguchi Computational Geometry October 11, 2001
 Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Graphics and Interaction Rendering pipeline & object modelling
 433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Geometric Representations. Stelian Coros
 Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Segmentation of point clouds
 Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Lecture notes: Object modeling
 Lecture notes: Object modeling One of the classic problems in computer vision is to construct a model of an object from an image of the object. An object model has the following general principles: Compact
Lecture notes: Object modeling One of the classic problems in computer vision is to construct a model of an object from an image of the object. An object model has the following general principles: Compact
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational