3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
|
|
|
- Chester Bond
- 6 years ago
- Views:
Transcription
1 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1






2 Acknowledgements I would like to thank the following researchers for joint work and inspiration in the past years: Joachim Hertzberg Kai Lingemann Stefan Stiene Hartmut Surmann Oliver Wulf Bernardo Wagner Simone Frintrop Dietrich Paulus Sara Mitri Dorit Borrmann Jan Elseberg Sebastian Thrun Thomas Christaller 2
3 About this talk (video) 3

4 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 4
5 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 5

 6")
6 3D Laser Scanning 2D Laser range finder are standard tools in automation and robotics 3D laser scanner for mobile robots based on SICK LMS 200 Based on a laser scanner Relatively cheap sensor Controlled pitch motion (120 v) Various resolutions and modi, e.g., intensity measurement {181, 361, 721} [h] x {128,, 500} [v] pts Fast measurement, e.g., 3.4 sec (181x256 points) 6




 FOV: 57 (h) 43")
7 Kinecting Microsoft Kinect Video 30 Hz RGB video: 8-bit VGA resolution ( Pixel) Monochrome Video Stream (depth information): 11-bit VGA 2048 depth values Depth: 1,2 3,5 m, (enhanced: 0,7 6 m) FOV: 57 (h) 43 (vert) Tilt unit 27 Cost effective 7





8 Professional 3D Scanners Structured light (close range, triangulation) Time-of-flight (pulsed laser vs. continuous wave) 8


")
9 Background Robotic Mapping If one knows the pose of a mobile robot precisely, then the sensor readings can be used to build a map. The pose of a robot is easy to compute from sensor readings, given a map. Simultaneous Localization and Mapping (SLAM) The chicken and egg dilemma 9
10 Background Robotic Mapping If one knows the pose of a mobile robot precisely, then the sensor readings can be used to build a map. The pose of a robot is easy to compute from sensor readings, given a map. Simultaneous Localization and Mapping (SLAM) (Fig. Burgard et al.) 10
 Here: 3D Data, 6D Poses (Fig.")
11 Background Robotic Mapping If one knows the pose of a mobile robot precisely, then the sensor readings can be used to build a map. The pose of a robot is easy to compute from sensor readings, given a map. Simultaneous Localization and Mapping (SLAM) Here: 3D Data, 6D Poses (Fig. Burgard et al.) 11

")
12 The Ariadne Robot (2002/2003) First, we used the 3D information for obstacle avoidance. Later of we did initial 3D mapping experiments. The motion of the robot 3 DoF (Video Crash) (Video NoCrash) 12

13 13
 Two 90W (200W)")


14 The Mobile Robot Kurt3D ( ) Kurt3D is a lightweight (25 kg) Two 90W (200W) motors, 48 NiMH a 4500mAh, C167 Microcontroller, CAN Controller, Centrino Notebook Indoor/Outdoor versions available main Sensor: 3D scanner 3D data, 6D poses (Video Osaka) 14

15 The Mobile Robot Irma3D (2010, ongoing) Technical Data: Base: volksbot 2D-Laserscanner: SICK LMS-100 3D-Scanner: Riegl VZ-400 IMU: XSens Up to 3 color cameras Optris Imager PI Canon 1000D 12 Notebook for control RTLinux + ROS Battery capacity 4 7.2Ah@12V (video) 15
16 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 16
17 The ICP Algorithm Scan registration Put two independent scans into one frame of reference Iterative Closest Point algorithm [Besl/McKay 1992] For prior point set M ( model set ) and data set D 1. Select point correspondences w i,j in {0,1} 2. Minimize for rotation R, translation t 3. Iterate 1. and 2. Four closed form solution for the minimization works in 3 translation plus 3 rotation dimensions 17




18 3D Mapping Examples CMU 3D mapping of abandoned mines RoboCup Rescue 3D reconstruction in the context of medical imaging 18
![The ICP global Algorithm ICP Algorithm Scan registration Put two independent scans into one frame of reference Iterative Closest Point algorithm [Besl/McKay 1992] For prior point set M ( model set )](/docs-images/78/78642273/images/19-3.jpg "and data set D 1. Select point correspondences w i,j in {0,1} 2. Minimize for rotation R, translation t 3. Iterate 1. and 2.")
19 The ICP global Algorithm ICP Algorithm Scan registration Put two independent scans into one frame of reference Iterative Closest Point algorithm [Besl/McKay 1992] For prior point set M ( model set ) and data set D 1. Select point correspondences w i,j in {0,1} 2. Minimize for rotation R, translation t 3. Iterate 1. and 2. Four closed form solution for the minimization Global consistent registration Minimize for all rotations R and translations t at the same time 19
20 Parameterizations for the Rigid Body Transformations Helix transformation solving a system of linear equations 20
21 Parameterizations for the Rigid Body Transformations Small angle approximation solving a system of linear equations 21
22 Parameterizations for the Rigid Body Transformations Explicit modeling of uncertainties Assumptions: The unknown error is normally distributed 22

 (Video 1)")
23 Comparisons of the Parametrizations Global ICP Gaussian noise in the 3D Point Cloud space Classical Pose GraphSLAM Gaussian noise in the space of poses Locally optimal Gradient descent needed ICP-like iterations using new point correspondences ICP-like iterations using new point correspondences needed as well Riegl Laser Measurement GmbH (Video courtesy of Riegl) (Video 1) (Video 2) (Video 3) 23

24 Closed Loop Detection and Global Relaxation 24
 25")
25 6D SLAM Full Example Leibniz University Hannover (RTS) 25

26 3D Point Cloud Processing Emerging Trends 26
27 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 27

28 Scene Interpretation Plane extraction using a novel RANSAC+ICP combination Semantic net for assigning meaningful labels to the planes 28


29 Detecting Shapes with RANSAC Improve selection of sample points Choose points with higher likelihood if in close proximity Lower number of draws required Speed up validation of hypothesis R. Schnabel, R. Wahl, and R. Klein. Efficient RANSAC for Point-Cloud Shape Detection. Computer Graphics Forum,
 y 23 19 17 16 1 3 5 11 z drivable points Flat angle in scanning order i, j")
30 Semantics by Point Labeling Classification of 3D points p i,j = ( i, z i,j, y i,j ) is in the i-th vertical scan the j-th 3D laser scan point (start counting from the bottom) y z drivable points Flat angle in scanning order i, j 30







31 Drivable Surface Classification Matched Scans, floor blue All drivable points Unfortunately not all robots are equipped with a 3D scanner Classification based on camera images and 2D laser scans for path planning in natural environments (Video 1) (Video 2) (Video 3) (Video 4) 31

32 Finding Objects in 3D Point Clouds 32

33 Feature Detection Using Integral Images Efficient representation of images using integral images Calculate features in integral images using Rotated features can be calculated with rotated integral images 33

34 Learning a Classifier (1) Learn objects from 3D-Scans Create a classification window that contains all possible features Learn combination of features using Ada-Boost [Viola und Jones 01, Freund und Schapire 96] Objects of different sizes are detected by rescaling the classifier window. 34
35 Learning a Classifier (2) Last but not least use a cascade to lower the false detection rate. Improvement: Use Classification and Regression Trees! 35





36 Object Detection Use the cascade for detection in the depth and reflectance image Logical AND yields reliable detection (false detection ~ 0%) 36

 Get")


37 Localize the Objects (1) Get object points via ray tracing 37



38 Localize the Objects (2) Fit objects in point cloud using an ICP variant For prior point set M ( model set ) and data set D 1. Select point correspondences w i,j in {0,1} 2. Minimize for rotation R, translation t 3. Iterate 1. and 2. 38


39 Point Semantic for Object Detection Task: Detect Objects in depth images Point labeling removes the ground Extract contour features Learning Detect objects Map building with labeled objects 39
 Task:")


40 Identifying 3D Google Warehouse Models (1) Task: Recognize Audi A4 in laser scan data Input: String Audi A4, 3D laser scan Output: Pose of the object with 6 DoF 40

41 Identifying 3D Google Warehouse Models (2) Algorithm: Query Google s data base and download all models Convert the models in point cloud data Segment your 3D scan and remove obvious objects Match the models into the segmented scan with a modified version of ICP (scale of the models is unknown!) Design an evaluation function to find the best match (video) 41

42 Full Wave Analysis 42

43 Multiple Echos 43


44 Vegetation Detection 1. Extract inner echos 2. Extract ROI 3. Classify regions 44

45 Vegetation Detection 45

46 Vegetation Detection 46
47 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 47

48 Definition / Discussion A semantic 3D map is a metrical map that contains in addition to geometrical information semantic label of the data points. Map presentation as video (Video) 48
 Inference methods Knowledge base Example robot: Knowledge Engineer creates knowledge base off-line Input of KBS comes from sensors Output drives the")
49 Where does knowledge come from? Where does it go? I/O Knowledge based software system (generic) Inference methods Knowledge base Example robot: Knowledge Engineer creates knowledge base off-line Input of KBS comes from sensors Output drives the robot (abstract) commands (generic) Inference methods Example expert system: Knowledge Engineer sets up knowledge base (off-line) User causes input and edit the output Sensor data Knowledge based robotic system Knowledge base Robots in natural environments must translate sensor data into symbols and inferences eventually into control data! 49
50 Symbol Grounding S. Harnad: The Symbol Grounding Problem Physica D 42: , 1990 cogprints.org/3106/01/sgproblem1.html How is meaning of a symbol to be grounded in something other than just more meaningless symbols? Is that an important question? Some (AI) say: No, at the best that s a technical problem! Some (Philosophy, Cog. Sci.) say: That s the point, at which artificial intelligence systems are doomed to fail! Some (AI, Cog. Sci., Robotics people, Nüchter) say: That s currently the most interesting point in fundamental research in AI 50
51 Specialization: Object anchoring Anchoring (object anchoring): the process of creating and maintaining the correspondence between symbols and sensor data that refer to the same physical objects Anchoring problem: the problem of how to perform anchoring in an artificial system S. Coradeschi, A. Saffiotti: An Introduction to the Anchoring Problem Robotics & Autonomous Systems 43(2 3):85 96, 2003 Specialization with symbol anchoring in general: Is related only to physical objects, e.g., no abstract objects like weather or no attributes ( red ) 51
52 Outline Introduction 3D Robotic Mapping Interpretation of Point Clouds Semantic Maps Conclusion 52
53 Conclusions Practical (on-line, on-board) variant of ICP for high-resolution point sets Generating overall consistent 3D maps with global relaxation Tested on various data sets (including borrowed ones, e.g., CMU mine mapping) Interpretation of 3D maps resulting in 3D object maps Integrated into robot controller for 3D environment mapping RoboCup Rescue as evaluation for our mapping approach 2004 second place, SSRR 2005 best paper award, th place However, there is still no theory about Semantic Maps in Robotics 53

 conclude additional semantic information (that extrapolates the sensor values,")
54 Conclusion Semantic Maps context Sensor data Semantic Maps Background knowledge in symbolical form For constructing semantic maps a robot uses sensor and semantic information to interpret the sensor data (e.g., for disambiguation) conclude additional semantic information (that extrapolates the sensor values, contradicts the sensors values) acquire goal-directed new sensor information (e.g., attention based control, active vision) 54

55 Recent Work (video) 55



56 Recent Work 56
57 References Please visit my Please visit our youtube Please check out our Open Source project 3DTK The 3D Toolkit 57
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF
 The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
6D SLAM with Kurt3D. Andreas Nüchter, Kai Lingemann, Joachim Hertzberg
 6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
Automatic Classification of Objects in 3D Laser Range Scans
 Automatic Classification of Objects in 3D Laser Range Scans Andreas Nüchter, Hartmut Surmann, Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Automatic Classification of Objects in 3D Laser Range Scans Andreas Nüchter, Hartmut Surmann, Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
RoboCupRescue - Robot League Team KURT3D, Germany
 RoboCup2004 Rescue Robot League Competition Lisbon, Portugal June 27 July 5, 2004 www.robocup2004.pt RoboCupRescue - Robot League Team KURT3D, Germany Hartmut Surmann 1, Rainer Worst 1, Matthias Hennig
RoboCup2004 Rescue Robot League Competition Lisbon, Portugal June 27 July 5, 2004 www.robocup2004.pt RoboCupRescue - Robot League Team KURT3D, Germany Hartmut Surmann 1, Rainer Worst 1, Matthias Hennig
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS
 6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
RoboCupRescue - Robot League Team KURT3D, Germany
 RoboCup2004 Rescue Robot League Competition Lisbon, Portugal June 27 July 5, 2004 www.robocup2004.pt RoboCupRescue - Robot League Team KURT3D, Germany Hartmut Surmann 1, Rainer Worst 1, Matthias Hennig
RoboCup2004 Rescue Robot League Competition Lisbon, Portugal June 27 July 5, 2004 www.robocup2004.pt RoboCupRescue - Robot League Team KURT3D, Germany Hartmut Surmann 1, Rainer Worst 1, Matthias Hennig
Fast Color-Independent Ball Detection for Mobile Robots
 Fast Color-Independent Ball Detection for Mobile Robots Sara Mitri, Kai Pervölz, Hartmut Surmann, Andreas Nüchter Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Fast Color-Independent Ball Detection for Mobile Robots Sara Mitri, Kai Pervölz, Hartmut Surmann, Andreas Nüchter Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Automatic Reconstruction of Colored 3D Models
 Automatic Reconstruction of Colored 3D Models Kai Pervölz, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Automatic Reconstruction of Colored 3D Models Kai Pervölz, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
RoboCupRescue 2006 Robot League, Deutschland1 (Germany)
") RoboCupRescue 2006 Robot League, Deutschland1 (Germany) Kai Lingemann 1, Andreas Nüchter 1, Joachim Hertzberg 1, Oliver Wulf 2, Bernardo Wagner 2, Kai Pervölz 3, Hartmut Surmann 3, and T. Christaller 3
RoboCupRescue 2006 Robot League, Deutschland1 (Germany) Kai Lingemann 1, Andreas Nüchter 1, Joachim Hertzberg 1, Oliver Wulf 2, Bernardo Wagner 2, Kai Pervölz 3, Hartmut Surmann 3, and T. Christaller 3
3D Laser Scanner for Tele-exploration Robotic Systems
 3D Laser Scanner for Tele-exploration Robotic Systems Kai Pervölz, Hartmut Surmann and Stefan May Fraunhofer Institute for Intelligent Analysis and Information Systems (IAIS) Schloss Birlinghoven D-53754
3D Laser Scanner for Tele-exploration Robotic Systems Kai Pervölz, Hartmut Surmann and Stefan May Fraunhofer Institute for Intelligent Analysis and Information Systems (IAIS) Schloss Birlinghoven D-53754
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Towards Mobile Mapping of Underground Mines. Andreas Nüchter, Jan Elseberg, Peter Janotta
 Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
3D Laserscanner App for Indoor Measurements
 3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Automatic Construction of Polygonal Maps From Point Cloud Data
 Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Saliency-based Object Recognition in 3D Data
 Saliency-based Object Recognition in 3D Data Simone Frintrop, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven,
Saliency-based Object Recognition in 3D Data Simone Frintrop, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven,
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform. Project Proposal. Cognitive Robotics, Spring 2005
 Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]
![If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]](/thumbs/80/81472349.jpg "If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]") The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
6DOF Semi-Rigid SLAM for Mobile Scanning
 6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
Ground Truth Evaluation of Large Urban 6D SLAM
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuC1.4 Ground Truth Evaluation of Large Urban 6D SLAM Oliver Wulf, Andreas
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuC1.4 Ground Truth Evaluation of Large Urban 6D SLAM Oliver Wulf, Andreas
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Planning Robot Motion for 3D Digitalization of Indoor Environments
 Planning Robot Motion for 3D Digitalization of Indoor Environments Andreas Nüchter Hartmut Surmann Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven D-53754
Planning Robot Motion for 3D Digitalization of Indoor Environments Andreas Nüchter Hartmut Surmann Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven D-53754
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS
 MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
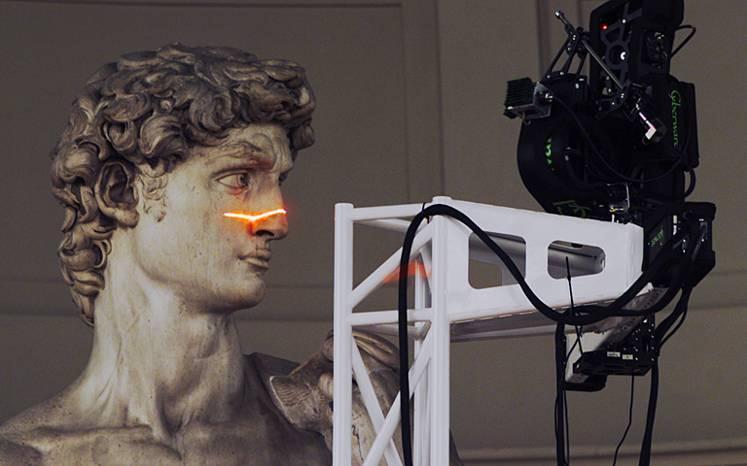
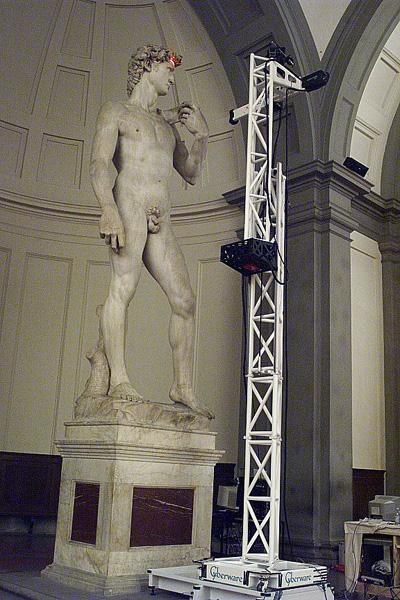
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites
 Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
Salient Visual Features to Help Close the Loop in 6D SLAM
 Visual Features to Help Close the Loop in 6D SLAM Lars Kunze, Kai Lingemann, Andreas Nüchter, and Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research
Visual Features to Help Close the Loop in 6D SLAM Lars Kunze, Kai Lingemann, Andreas Nüchter, and Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
3D Sensing and Mapping for a Tracked Mobile Robot with a Movable Laser Ranger Finder
 3D Sensing and Mapping for a Tracked Mobile Robot with a Movable Laser Ranger Finder Toyomi Fujita Abstract This paper presents a sensing system for 3D sensing and mapping by a tracked mobile robot with
3D Sensing and Mapping for a Tracked Mobile Robot with a Movable Laser Ranger Finder Toyomi Fujita Abstract This paper presents a sensing system for 3D sensing and mapping by a tracked mobile robot with
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Thermal 3D Mapping of Building
 Thermal 3D Mapping of Building Façades Dorit Borrmann, Jan Elseberg, and Andreas Nüchter Abstract Never before in history were humans as dependant on energy as we are today. But the natural ressources
Thermal 3D Mapping of Building Façades Dorit Borrmann, Jan Elseberg, and Andreas Nüchter Abstract Never before in history were humans as dependant on energy as we are today. But the natural ressources
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Extraction of 3D Images Using Pitch-Actuated 2D Laser Range Finder for Robotic Vision
 ROSE 2 - IEEE International Workshop on Robotic and Sensors Environments Phoenix - Arizona, 5-6 October 2 Extraction of 3D Images Using Pitch-Actuated 2D Laser Range Finder for Robotic Vision Pinhas Ben-Tzvi
ROSE 2 - IEEE International Workshop on Robotic and Sensors Environments Phoenix - Arizona, 5-6 October 2 Extraction of 3D Images Using Pitch-Actuated 2D Laser Range Finder for Robotic Vision Pinhas Ben-Tzvi
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
arxiv: v1 [cs.ro] 26 Nov 2018
![arxiv: v1 [cs.ro] 26 Nov 2018](/thumbs/91/105470008.jpg "arxiv: v1 [cs.ro] 26 Nov 2018") Fast Gaussian Process Occupancy Maps Yijun Yuan, Haofei Kuang and Sören Schwertfeger arxiv:1811.10156v1 [cs.ro] 26 Nov 2018 Abstract In this paper, we demonstrate our work on Gaussian Process Occupancy
Fast Gaussian Process Occupancy Maps Yijun Yuan, Haofei Kuang and Sören Schwertfeger arxiv:1811.10156v1 [cs.ro] 26 Nov 2018 Abstract In this paper, we demonstrate our work on Gaussian Process Occupancy
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images
 Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images Joydeep Biswas Robotics Institute Carnegie Mellon University Pittsburgh, PA 523, USA joydeepb@ri.cmu.edu Manuela Veloso
Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images Joydeep Biswas Robotics Institute Carnegie Mellon University Pittsburgh, PA 523, USA joydeepb@ri.cmu.edu Manuela Veloso
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM
 DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
Advances in 3D data processing and 3D cameras
 Advances in 3D data processing and 3D cameras Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante Contents Cameras and 3D images 3D data compression 3D registration 3D feature
Advances in 3D data processing and 3D cameras Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante Contents Cameras and 3D images 3D data compression 3D registration 3D feature
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Transform
 School of Engineering and Science Bachelor s Thesis Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Remus-Claudiu Dumitru May 2012 First supervisor: Prof. Dr. Andreas Nüchter
School of Engineering and Science Bachelor s Thesis Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Remus-Claudiu Dumitru May 2012 First supervisor: Prof. Dr. Andreas Nüchter
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines
 Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks
 1 Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks Chad Jenkins Assistant Professor Computer Science Department Brown University Women in Computer Science
1 Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks Chad Jenkins Assistant Professor Computer Science Department Brown University Women in Computer Science
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment
 Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
Probabilistic Matching for 3D Scan Registration
 Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using a Continuously Rotating 2D Laser Scanner
 In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
Automatic Model Refinement for 3D Reconstruction with Mobile Robots
 Automatic Model Refinement for D Reconstruction with Mobile Robots Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven,
Automatic Model Refinement for D Reconstruction with Mobile Robots Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven,
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Consistent 3D Model Construction with Autonomous Mobile Robots
 Consistent 3D Model Construction with Autonomous Mobile Robots Andreas Nüchter, Hartmut Surmann, Kai Lingemann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss
Consistent 3D Model Construction with Autonomous Mobile Robots Andreas Nüchter, Hartmut Surmann, Kai Lingemann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Vision Aided 3D Laser Scanner Based Registration
 1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011
 Ryan Hamor CPRE 583 September 2011") Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder
 HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder Masashi Awai, Takahito Shimizu and Toru Kaneko Department of Mechanical
HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder Masashi Awai, Takahito Shimizu and Toru Kaneko Department of Mechanical
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Computer Vision/Graphics -- Dr. Chandra Kambhamettu for SIGNEWGRAD 11/24/04
 Computer Vision/Graphics -- Dr. Chandra Kambhamettu for SIGNEWGRAD 11/24/04 Computer Vision : Understanding of images Computer Graphics : Creation of images Courses offered: CISC4/640, CISC4/689, CISC849,
Computer Vision/Graphics -- Dr. Chandra Kambhamettu for SIGNEWGRAD 11/24/04 Computer Vision : Understanding of images Computer Graphics : Creation of images Courses offered: CISC4/640, CISC4/689, CISC849,
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT
 Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic