The Internet of Things: Roadmap to a Connected World. IoT and Localization
|
|
|
- Tyler Sparks
- 6 years ago
- Views:
Transcription
1 IoT and Localization Daniela Rus Andrew (1956) and Erna Viterbi Prof., EECS Director, CSAIL Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology
2





3 4x 4x 4x 2x

4

5

6 Rico Shen 2008
7 OUTLINE Introduction to Localization Robust Localization Outdoors Localization Indoors Localization
8 LOCALIZATION PROBLEM STATEMENT Given some representation of the environment, to localize, device must, through sensing, determine its pose with respect to the specified representation Pose = (location, heading) wrt external frame Global coordinate frame E.g., GPS (Earth) coordinates Local coordinate frame Ceiling or floor tiles Mission starting pose Environment features E.g., nearby walls, corners, markings y x
9 OPEN LOOP POSE ESTIMATION Estimate pose from expected results of motion No sensing Dead reckoning: Use odometry to estimate pose w.r.t. initial coordinate frame Multiple error sources; Pose error accumulates with time and motion


10 OPEN LOOP POSE ESTIMATION
11 LOCALIZATION SCENARIOS Estimating location in 2D From measured ranges (distances) From measured bearings (directions) L L P L L L q L L
 bearing to object Radar return Laser range scanner return Vision (stereo camera")
12 SENSORS AND MEASUREMENTS Range to surface patch, corner Sonar, IR Bearing (absolute, relative, differential) Compass; vision (calibrated camera) Range to point RSS, TOF from RF/acoustic beacon TDoA of acoustic & RF pulse Range and (body-relative) bearing to object Radar return Laser range scanner return Vision (stereo camera rig)
 L q L L L Bearing q (relative to straight ahead in robot")
13 TRIANGULATION Natural geometry for 2D localization Simplest framework combining range, bearing Used by Egyptians, Romans for engineering L L L P Range d (distance from from P to L) L q L L L Bearing q (relative to straight ahead in robot frame)

14 TRIANGULATION FROM RANGE DATA Device at unknown position P measures distances d 1, d 2 to known landmarks L 1, L 2 Given d 1, d 2, what are possible values of P? L 1 d 1 y? P L 2 d 2 Robot measures d 1, d 2 x
15 TRIANGULATION FROM RANGE DATA Device must lie on circles of radius d 1, d 2 centered at L 1, L 2 respectively L 1 d 1 L 2 y d 2 P x
16 TRIANGULATION FROM RANGE DATA Change basis: put L 1 at origin, L 2 at (a,0) y L 1 = (0,0) x = (a 2 + d d 2 2 ) / 2a y = ± (d x 2 ) d 1 L 2 = (a, 0) P (Try e.g. setting d 1 = a, d 2 = 0) d 2 x
17 TRIANGULATION FROM RANGE DATA Change basis: put L 1 at origin, L 2 at (a,0) y L 1 = (0,0) x = (a 2 + d d 2 2 ) / 2a y = ± (d x 2 ) d 1 L 2 = (a, 0) P (Try e.g. setting d 1 = a, d 2 = 0) d 2 x Are we done?
18 TRIANGULATION FROM RANGE DATA Two solutions in general, P and P How to select the correct solution? L 1? P? d 1 P d 2 L 2
19 DISAMBIGUATING SOLUTIONS A priori information (richer map) L 1 P d 1 L 2 P d 2
20 DISAMBIGUATING SOLUTIONS Continuity (i.e., spatiotemporal information) L 1 P d 1 L 2 P d 2 Position now Position 10 minutes ago
 L 1 P L 3 d 1 d 3 L")
21 DISAMBIGUATING SOLUTIONS Additional landmarks (redundancy) L 1 P L 3 d 1 d 3 L 2 P d 2
22 TRIANGULATION FROM RANGE DATA Are we done yet, i.e., is pose fully determined? No: absolute heading is not determined L 1 P d 1 L 2 P d2?

23 TRIANGULATION FROM BEARING DATA Body-relative bearings to two landmarks Bearings measured relative to straight ahead Robot observes: L 1 at bearing q 1 L 2 at bearing q 2 L 2 q 2 a L 1 differential bearing a = q 2 q 1 q 1 q = 0 (radians)
24 TRIANGULATION FROM BEARING DATA Body-relative bearings to two landmarks Bearings measured relative to straight ahead Robot observes: L 1 at bearing q 1 L 2 at bearing q 2 L 2 q 2 a L 1 differential bearing a = q 2 q 1 q 1 q = 0 (radians) are two bearings enough for unique localization?
25 Triangulation from two bearings q 1 q 2 L 2 L 1 a a a a Device somewhere on black circular arc Can it be anywhere on circle? (No; ordering constraint)
26 TRIANGULATION FROM BEARING DATA Measure bearing to third landmark Yields robot position and orientation Also called robot pose (in this case, 3 DoFs) L 1 L 2 L 3
27 MEASUREMENT UNCERTAINTY: RAGES Ranges, bearings are typically imprecise Range case (estimated ranges ~d 1, ~d 2 ) L 1 ~d 1 ~d 2 L 2 P Locus of likely positions
 What is locus of recovered vehicle poses? Solve in closed form? Is there an alternative?")
28 MEASUREMENT UNCERTAINTY: BEARING L 1 L 2 Two-bearing case (estimated bearings ~q 1, ~q 2 ) What is locus of recovered vehicle poses? Solve in closed form? Is there an alternative?
29 MEASUREMENT UNCERTAINTY Bearing case (measurements ~q 1, ~q 2, ~q 3 ) L 1 L 2 L 3 {P, q} is this always a satisfactory Locus pose of bound? likely poses
30 LOCALIZATION SUMMARY Range based localization Bearing base localization Uncertainty
31 OUTLINE Introduction to Localization Robust Localization Outdoors Localization Indoors Localization
32 LOCALIZATION WITH NOISY RANGES (-1,12) Characteristics: Robust against noise No beacons Handles mobility (-4,7) (-7,1) cm (10,0) (-5,-5) (6,-5) D. Moore, J. Leonard, D. Rus, S. Teller, The Robust Internet distributed of Things: Roadmap network to a localization Connected World with noisy range measurements, Proceedings of the 2004 ACM International Conference on Embedded Networked Sensor Systems (Sensys 2004)
33 COMPLICATIONS OF NOISE Small measurement errors due to noise lead to large localization errors Example: flip ambiguity from noise A A D C OR C D B Small error in CD leads to large position error of D B D. Moore, J. Leonard, D. Rus, S. Teller, Robust distributed network localization with noisy range measurements, Proceedings of the 2004 ACM International Conference on Embedded Networked Sensor Systems (Sensys 2004)
34 THE ROBUST QUADRILATERAL Consider this graph: Robustness characteristics: Rigid (no continuous deformations) No discontinuous flex ambiguities (by Laman s Theorem) We probabilistically constrain it to minimize the likelihood of a flip ambiguity We call it a robust quadrilateral A graph constructed from overlapping robust quads will itself possess the robustness characteristics
35 TRILATERATION W/ ROBUST QUADS If three nodes of a quad have known position, fourth can be computed with trilateration Quads can be chained in this manner

36 COMPLETE ROBUSTNESS TEST Test for robust triangle: Let b = minimum edge length of the triangle Let θ = minimum angle of the triangle Then, in worst case: d err = b sin 2 θ If b sin 2 θ > 3σ then probability of a flip is less than 1% Test for robust quadrilateral: Quad is robust if all four sub-triangles are robust
37 ALGORITHM Starting cluster w/ distance measurements Choose two neighboring nodes for initial robust triangle (-5,-5) (0,0) (6,-5) (0,0) (0,12) x (10,0) y
38 ALGORITHM (CONT.) Cluster localization complete (-5,-5) (6,-5) (0,0) (-4,7) (10,0) (0,12)
39 Distance (cm) Localization error (cm) EXPERIMENTAL RESULTS Robot path over time Error in robot path over time Distance (cm) Time (seconds) (Ground truth derived from computer vision algorithm applied to captured video)
40 Distance (cm) SIMULATION RESULTS With robust quads Localized position versus ground truth Without robust quads Noise std. dev. σ = 5.0 cm Communication radius MSE = 16.2 cm MSE = 54.9 cm 75% of nodes localized 99% of nodes localized Distance (cm) Distance (cm)
41 Localizing the left-over nodes
42 Robot broadcasts locations
43 Robot broadcasts locations
44 OUTLINE Introduction to Localization Robust Localization Outdoors Localization Indoors Localization
45 No Landmarks But Map
46 GPS

47 Tilted-down LIDAR Planar LIDAR Webcam IMU+Odom 2016 Massachusetts Institute 53/56 of Technology
48 2016 Massachusetts Institute 54/56 of Technology
49 Curb Vertical features Surface 2016 Massachusetts Institute 55/56 of Technology
50 2016 Massachusetts Institute 56/56 of Technology
51 Curb features 2016 Massachusetts Institute 57/56 of Technology
52 Vertical Surface 2016 Massachusetts Institute 58/56 of Technology
53
54 MONTE CARLO LOCALIZATION FOR POSE 60/56

55 CURB-INTERSECTION FEATURE EXTRACTION 2D LIDAR 61/56
56 CURB-INTERSECTION FEATURE EXTRACTION Filter 62/56
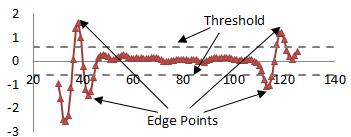

57 CURB-INTERSECTION FEATURE EXTRACTION Filter 63/56
58 VIRTUAL SENSORS FOR CURB AND INTERSECTION Virtual LIDAR of Curb features (accumulates and fuses points) Likelihood model Virtual LIDAR of intersection features (triggered when there are no curb points) Beam model 64/56


59 EXPERIMENTAL EVALUATION OF MCL Localization Results Curb Map Odometry GPS/INS Detected Curbs MCL Method Curb Outline 66/56



60 LOCALIZATION ACCURACY Odometry GPS/INS MCL Method Curb The Internet Outlineof Things: Roadmap to a Connected World 67/56

61 ZJ Chong, B. Qin, T, Bandyopadhyay, M. Ang, E. Frazzoli, D. Rus, Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment, Proceedings of the 2013 Int. Conf. on Robotics and Automation (ICRA), 2013 IEEE International Conference, pp Massachusetts Institute 68/56 of Technology
62 Curb-intersection features exist Uncertainty on straight segments 69/56
63 Curb-intersection features exist Uncertainty on straight segments Use Vertical Surfaces 70/56

64 2016 Massachusetts Institute 71/56 of Technology


65 3D ROLLING WINDOW FOR FEATURES 72/56
66 2016 Massachusetts Institute 73/56 of Technology

67 Surface normal For classification 2016 Massachusetts Institute 74/56 of Technology
68 2016 Massachusetts Institute 75/56 of Technology
69 2016 Massachusetts Institute 76/56 of Technology

70 2016 Massachusetts Institute 77/56 of Technology

71 Synthetic LIDAR based localization The Internet of Things: Roadmap to Lateral a Connected World 2016 Massachusetts Institute 78/56 of Technology

72 ZJ Chong, B. Qin, T, Bandyopadhyay, M. Ang, E. Frazzoli, D. Rus, Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment, Proceedings of The the Internet 2013 of Int. Things: Conf. Roadmap on Robotics to a Connected and Automation World (ICRA), 2013 IEEE International Conference, pp Massachusetts Institute 79/56 of Technology
73 OUTLINE Introduction to Localization Robust Localization Outdoors Localization Indoors Localization


![[Lease 04], [Horus](/docs-images/78/78643017/images/74-3.jpg "05], [PlaceLab")
![05], [Beepbeep](/docs-images/78/78643017/images/74-4.jpg "07], [SrndSense")
![09], [EZ 10],](/docs-images/78/78643017/images/74-5.jpg "[Compac")
![10],[BatPhone 11],](/docs-images/78/78643017/images/74-6.jpg "[Wigem 11], [Zee")
![12], [Will](/docs-images/78/78643017/images/74-7.jpg "12],[Centaur 12],")
![[Unloc 12],](/docs-images/78/78643017/images/74-8.jpg "[PinLoc 12],")
74 INDOOR GPS TODAY? Businesses Research [RADAR 00], [Cricket 04], [Lease 04], [Horus 05], [PlaceLab 05], [Beepbeep 07], [SrndSense 09], [EZ 10], [Compac 10],[BatPhone 11], [Wigem 11], [Zee 12], [Will 12],[Centaur 12], [Unloc 12], [PinLoc 12], [FootSlm 12], [ArrayTrack 13], [Guoguo 13], [PinPoint 13],...

75 S. Kumar, S. Gil, D. Katabi, D. Rus, Accurate Indoor Localization with Zero Startup Cost, Proceedings of Mobicom 2014.

76 S. Kumar, S. Gil, D. Katabi, D. Rus, Accurate Indoor Localization with Zero Startup Cost, Proceedings of Mobicom 2014.

77 Pos 1 Pos 2 Localization Software


78 WITH MANY ANTENNAS Such a device does not exist!
79 SYNTHETIC APERTURE RADAR (SAR) Move device to emulate antenna array

80 Users to rotate tablet Process signals as circular array

81 EVALUATION Large Library 5 Access Points Baseline: Angle-of-Arrival The Internet Things: using Roadmap 2-Antenna to a Connected World Array





82 LOCALIZING OBJECTS OF INTEREST AROUND YOU To: Bob Found interesting (21.39, 35.13)


83 OBJECT GEO-TAGGING To: Facilities Reporting Broken (30.56, 21.23)
84 EVALUATION OF OBJECT GEOTAGGING Integrate Ubicarse with VSFM toolkit Localize books in the library
85 SUMMARY Localization as pervasive, seamless, instantaneous service Localized machines will be smarter and more engaged with us Localized devices will help us know more about us & world
86 CDF ACCURACY IN GEO-TAGGING 17 cm Error in Dimension (m)
87 THANK YOU! Daniela Rus Andrew (1956) and Erna Viterbi Prof., EECS Director, CSAIL Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology
Robust Distributed Sensor Network Localization with Noisy Range Measurements. David Christopher Moore
 Robust Distributed Sensor Network Localization with Noisy Range Measurements by David Christopher Moore B.S., California Institute of Technology (2003) Submitted to the Department of Electrical Engineering
Robust Distributed Sensor Network Localization with Noisy Range Measurements by David Christopher Moore B.S., California Institute of Technology (2003) Submitted to the Department of Electrical Engineering
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Localization of Multiple Robots with Simple Sensors
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Jie Gao Computer Science Department Stony Brook University
 Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory studies whether you can move
Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory studies whether you can move
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Localization algorithm using a virtual label for a mobile robot in indoor and outdoor environments
 Artif Life Robotics (2011) 16:361 365 ISAROB 2011 DOI 10.1007/s10015-011-0951-7 ORIGINAL ARTICLE Ki Ho Yu Min Cheol Lee Jung Hun Heo Youn Geun Moon Localization algorithm using a virtual label for a mobile
Artif Life Robotics (2011) 16:361 365 ISAROB 2011 DOI 10.1007/s10015-011-0951-7 ORIGINAL ARTICLE Ki Ho Yu Min Cheol Lee Jung Hun Heo Youn Geun Moon Localization algorithm using a virtual label for a mobile
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Passive Mobile Robot Localization within a Fixed Beacon Field
 Passive Mobile Robot Localization within a Fixed Beacon Field Carrick Detweiler, John Leonard, Daniela Rus, and Seth Teller Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute
Passive Mobile Robot Localization within a Fixed Beacon Field Carrick Detweiler, John Leonard, Daniela Rus, and Seth Teller Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Localization of Sensor Networks II
 Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 2/3/09 Jie Gao CSE595-spring09 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory
Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 2/3/09 Jie Gao CSE595-spring09 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
 007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
007 IEEE International Conference on Robotics and Automation Roma, Italy, 0-4 April 007 FrE5. Accurate Motion Estimation and High-Precision D Reconstruction by Sensor Fusion Yunsu Bok, Youngbae Hwang,
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS. Josep Maria Font, Joaquim A. Batlle
 MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS Josep Maria Font, Joaquim A. Batlle Department of Mechanical Engineering Technical University of Catalonia (UC) Avda. Diagonal 647, 08028
MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS Josep Maria Font, Joaquim A. Batlle Department of Mechanical Engineering Technical University of Catalonia (UC) Avda. Diagonal 647, 08028
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER. Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda**
 DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda** * Department of Mechanical Engineering Technical University of Catalonia (UPC)
DYNAMIC POSITIONING OF A MOBILE ROBOT USING A LASER-BASED GONIOMETER Joaquim A. Batlle*, Josep Maria Font*, Josep Escoda** * Department of Mechanical Engineering Technical University of Catalonia (UPC)
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Encoder applications. I Most common use case: Combination with motors
 3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People
 A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita, and Hajime Asama Abstract
A Framework for Bearing-Only Sparse Semantic Self-Localization for Visually Impaired People Irem Uygur, Renato Miyagusuku, Sarthak Pathak, Alessandro Moro, Atsushi Yamashita, and Hajime Asama Abstract
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Topological Navigation and Path Planning
 Topological Navigation and Path Planning Topological Navigation and Path Planning Based upon points of interest E.g., landmarks Navigation is relational between points of interest E.g., Go past the corner
Topological Navigation and Path Planning Topological Navigation and Path Planning Based upon points of interest E.g., landmarks Navigation is relational between points of interest E.g., Go past the corner
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Matching Evaluation of 2D Laser Scan Points using Observed Probability in Unstable Measurement Environment
 Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Constraint-Based Landmark Localization
 Constraint-Based andmark ocalization Ashley W. Stroupe 1, Kevin Sikorski 2, and Tucker Balch 3 1 The Robotics Institute, Carnegie Mellon University, Pittsburgh, Pennsylvania, USA ashley@ri.cmu.edu 2 Computer
Constraint-Based andmark ocalization Ashley W. Stroupe 1, Kevin Sikorski 2, and Tucker Balch 3 1 The Robotics Institute, Carnegie Mellon University, Pittsburgh, Pennsylvania, USA ashley@ri.cmu.edu 2 Computer
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences
 Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Geometrical Feature Extraction Using 2D Range Scanner
 Geometrical Feature Extraction Using 2D Range Scanner Sen Zhang Lihua Xie Martin Adams Fan Tang BLK S2, School of Electrical and Electronic Engineering Nanyang Technological University, Singapore 639798
Geometrical Feature Extraction Using 2D Range Scanner Sen Zhang Lihua Xie Martin Adams Fan Tang BLK S2, School of Electrical and Electronic Engineering Nanyang Technological University, Singapore 639798
Davide Scaramuzza. University of Zurich
 Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras
 UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention
 Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS. by Aleksandr Elesev
 ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS by Aleksandr Elesev A mobile robot must know its position in order to operate autonomously. The process of determining the robot s position from
ABSTRACT ROBOT LOCALIZATION USING INERTIAL AND RF SENSORS by Aleksandr Elesev A mobile robot must know its position in order to operate autonomously. The process of determining the robot s position from
Odometry-based Online Extrinsic Sensor Calibration
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Toyo, Japan Odometry-based Online Extrinsic Sensor Calibration Sebastian Schneider, Thorsten Luettel and
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Toyo, Japan Odometry-based Online Extrinsic Sensor Calibration Sebastian Schneider, Thorsten Luettel and
POME A mobile camera system for accurate indoor pose
 POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Robotic Perception and Action: Vehicle SLAM Assignment
 Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Time-to-Contact from Image Intensity
 Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
MTRX4700: Experimental Robotics
 Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Summary Page Robust 6DOF Motion Estimation for Non-Overlapping, Multi-Camera Systems
 Summary Page Robust 6DOF Motion Estimation for Non-Overlapping, Multi-Camera Systems Is this a system paper or a regular paper? This is a regular paper. What is the main contribution in terms of theory,
Summary Page Robust 6DOF Motion Estimation for Non-Overlapping, Multi-Camera Systems Is this a system paper or a regular paper? This is a regular paper. What is the main contribution in terms of theory,
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Motion Estimation for Multi-Camera Systems using Global Optimization
 Motion Estimation for Multi-Camera Systems using Global Optimization Jae-Hak Kim, Hongdong Li, Richard Hartley The Australian National University and NICTA {Jae-Hak.Kim, Hongdong.Li, Richard.Hartley}@anu.edu.au
Motion Estimation for Multi-Camera Systems using Global Optimization Jae-Hak Kim, Hongdong Li, Richard Hartley The Australian National University and NICTA {Jae-Hak.Kim, Hongdong.Li, Richard.Hartley}@anu.edu.au
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception
 DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Ground Plane Motion Parameter Estimation For Non Circular Paths
 Ground Plane Motion Parameter Estimation For Non Circular Paths G.J.Ellwood Y.Zheng S.A.Billings Department of Automatic Control and Systems Engineering University of Sheffield, Sheffield, UK J.E.W.Mayhew
Ground Plane Motion Parameter Estimation For Non Circular Paths G.J.Ellwood Y.Zheng S.A.Billings Department of Automatic Control and Systems Engineering University of Sheffield, Sheffield, UK J.E.W.Mayhew
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
Robust Distributed Network Localization with Noisy Range Measurements
 Robust istributed Network Localization with Noisy Range Measurements avid Moore John Leonard aniela Rus Seth Teller MIT omputer Science and rtificial Intelligence Laboratory The Stata enter, 32 Vassar
Robust istributed Network Localization with Noisy Range Measurements avid Moore John Leonard aniela Rus Seth Teller MIT omputer Science and rtificial Intelligence Laboratory The Stata enter, 32 Vassar
L12. EKF-SLAM: PART II. NA568 Mobile Robotics: Methods & Algorithms
 L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
Practical Robotics (PRAC)
") Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment
 2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment Z. J. Chong 1, B. Qin
2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment Z. J. Chong 1, B. Qin
Distributed Vision-Aided Cooperative Navigation Based on Three-View Geometry
 Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Visual Odometry for Non-Overlapping Views Using Second-Order Cone Programming
 Visual Odometry for Non-Overlapping Views Using Second-Order Cone Programming Jae-Hak Kim 1, Richard Hartley 1, Jan-Michael Frahm 2 and Marc Pollefeys 2 1 Research School of Information Sciences and Engineering
Visual Odometry for Non-Overlapping Views Using Second-Order Cone Programming Jae-Hak Kim 1, Richard Hartley 1, Jan-Michael Frahm 2 and Marc Pollefeys 2 1 Research School of Information Sciences and Engineering
State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements
 State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements António Pedro Aguiar aguiar@ece.ucsb.edu João Pedro Hespanha hespanha@ece.ucsb.edu Dept.
State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements António Pedro Aguiar aguiar@ece.ucsb.edu João Pedro Hespanha hespanha@ece.ucsb.edu Dept.
Announcements. Recognition (Part 3) Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test
 Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test") Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER. A Thesis Presented to the Graduate School of Clemson University
 ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science
ODOMETRY CORRECTION OF A MOBILE ROBOT USING A RANGE-FINDING LASER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Collecting outdoor datasets for benchmarking vision based robot localization
 Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
An Active Tracking System Using IEEE Based Ultrasonic Sensor Devices
 An Active Tracking System Using IEEE 802.15.4-Based Ultrasonic Sensor Devices Shinyoung Yi and Hojung Cha Department of Computer Science, Yonsei University Seodaemun-gu, Shinchon-dong 134, Seoul 120-749,
An Active Tracking System Using IEEE 802.15.4-Based Ultrasonic Sensor Devices Shinyoung Yi and Hojung Cha Department of Computer Science, Yonsei University Seodaemun-gu, Shinchon-dong 134, Seoul 120-749,
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very