Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
|
|
|
- Bryce Elliott
- 6 years ago
- Views:
Transcription
1 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References:
2 Course Description 6-week course to introduce path planning and related algorithms Course consists of lectures with practical implementations using Matlab and the NXT Tribot Robot Course will culminate with a path planning challenge using a robot to navigate a course with obstacles
3 Syllabus Week 1 BFS and DFS Week 2 A* and Dijkstra s Algorithm Week 3 Potential Fields Week 4 Randomized Path Planning Week 5 SLAM Week 6 Path Planning Challenge
4 Homework One assignment per week Matlab implementation of planning technique or algorithm Should require ~2 hours to complete
5 Student Introductions Name Major, School, Year Hometown Hobbies Something interesting about you What you hope to get out of the course
6 Instructor Christopher Korpela 1 st year PhD Student in EE Bel Air, MD Soccer and running

7 What is Path (Motion) Planning? Process of detailing a task into discrete motions Example: navigating a mobile robot from a start point to a distant end point


8 Basic Path Planning Problem Statement: Compute a continuous sequence of collision-free robot configurations connecting the initial and goal configurations
9 Live Motion Planning Experiments Person 1 walks through some obstacles Person 1, looking at Person 2, directs Person 2 through obstacles Person 1, looking at Person 2 with eyes closed, directs Person 2 through obstacles Person 1, looking at a map and not Person 2, whose eyes are still closed, directs Person 2 through obstacles Person 1, looking at an object and Person 2, whose eyes are closed, directs Person 2 to grab an obstacle How do we do the last experiment with a map?
10 What did we assume? Perfect sensors? What information Uncertainty Perfect control? What controls? Uncertainty Perfect thinking? Knowledge of the world? Complete? Processing the world? Everything?
11 Path Planning Considerations Planning tasks Navigation Coverage Localization Mapping Properties of the robot degrees of freedom holonomic or not kinematic vs. dynamic Properties of Algorithms Optimality Computational complexity Completeness Resolution completeness Probabilistic completeness Online vs. offline Sensor-based vs. not Feedback or not
12 Basics: Metrics There are many different ways to measure a path: Time Distance traveled Expense Distance from obstacles Etc
13 Mathematical Rigor
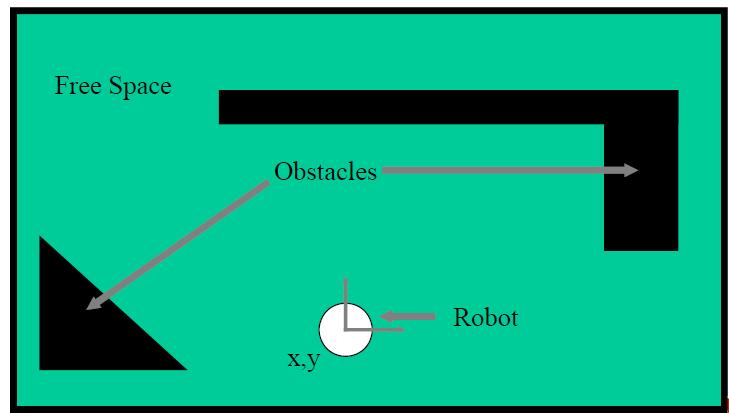
14 The World consists of Obstacles Already occupied spaces of the world In other words, robots can t go there Free Space Unoccupied space within the world Robots might be able to go here To determine where a robot can go, we need to discuss what a Configuration Space is




15 Robots
16 Robot and Environment
17 The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world How to create it First abstract the robot as a point object. Then, enlarge the obstacles to account for the robot s footprint and degrees of freedom In our example, the robot was circular, so we simply enlarged our obstacles by the robot s radius (note the curved vertices)

18 Configuration Space: Accommodate Robot Size

19 Trace Boundary of Workspace
20 Motion Planning Statement If W denotes the robot s workspace, And C i denotes the i th obstacle, Then the robot s free space, FS, is defined as: And a path where c(0) is q start and c(1) is q goal
21 Motion Planning as Graph Searches Abstract representation of a collection of items A collection of vertices & edges Terminology Adjacency Paths and Cycles Degree of a vertex Fully connected graphs
22 Types of Graphs Directed vs. Undirected Weighted vs. Unweighted
23 Types of Graphs Cyclic vs. Acyclic Trees
24 Grids
25 Stacks and Queues Stack: First in, Last out (FILO) Queue: First in, First out (FIFO)

26 Graph Representation: Example Objective: We want to represent all possible ways to get from configuration A to B using a graph HOW?
27 Graph Representation: Example
28 Search in Path Planning Find a path between two locations in an unknown, partially known, or known environment Search Performance Completeness Optimality Operating Costs Space Complexity Time Complexity
29 Search Uninformed Search Use no information obtained from the environment Blind search: BFS (Wavefront), DFS Informed Search Use evaluation function More efficient Heuristic Searchers: A*, D*, etc.

30 Uniformed Search: BFS
31 Breadth First Search 1. Enqueue the root node. 2. Dequeue a node and examine it. If the element sought is found in this node, quit the search and return a result. Otherwise enqueue any successors (the direct child nodes) that have not yet been discovered. 3. If the queue is empty, every node on the graph has been examined quit the search and return "not found". 4. If the queue is not empty, repeat from Step 2.

32 Uninformed Search: DFS
 is an edge IF y was not visited yet THEN")
33 Depth First Search algorithm dft(x) visit(x) FOR each y such that (x,y) is an edge IF y was not visited yet THEN dft(y)
34 Depth First and Breadth First Searches
35 DASL BFS-DFS Tutorial utorial.htm Download m-files Change obstacle configuration
36 The Wavefront Planner A common algorithm used to determine the shortest paths between two points In essence, a breadth first search of a graph For simplification, we ll present the world as a two-dimensional grid Setup: Label free space with 0 Label start as START Label the destination as 2
37 Representations World Representation You could always use a large region and distances However, a grid can be used for simplicity
38 Representations: A Grid Distance is reduced to discrete steps For simplicity, we ll assume distance is uniform Direction is now limited from one adjacent cell to another Time to revisit Connectivity
39 Representations: Connectivity 8-Point Connectivity 4-Point Connectivity

40 The Wavefront Planner: Setup
41 The Wavefront in Action (Part 1) Starting with the goal, set all adjacent cells with 0 to the current cell Point Connectivity or 8-Point Connectivity? Your Choice. We ll use 8-Point Connectivity in our example
42 The Wavefront in Action (Part 2) Now repeat with the modified cells This will be repeated until no 0 s are adjacent to cells with values >= 2 0 s will only remain when regions are unreachable
43 The Wavefront in Action (Part 3) Repeat again
 And")
44 The Wavefront in Action (Part 4) And again
45 The Wavefront in Action (Part 5) And again until
46 The Wavefront in Action (Done) You re done Remember, 0 s should only remain if unreachable regions exist
47 The Wavefront, Now What? To find the shortest path, according to your metric, simply always move toward a cell with a lower number The numbers generated by the Wavefront planner are roughly proportional to their distance from the goal Two possible shortest paths shown
48 Wavefront (Overview) Divide the space into a grid. Number the squares starting at the start in either 4 or 8 point connectivity starting at the goal, increasing till you reach the start. Your path is defined by any uninterrupted sequence of decreasing numbers that lead to the goal.

49 Wavefront Slide
50 Wavefront References ng_wavefront.shtml
51 Final Notes Introduction to path planning challenge Motion capture, grid based, obstacles, map vs. no map
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
MEM380 Applied Autonomous Robots Fall Depth First Search A* and Dijkstra s Algorithm
 MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
ME/CS 132: Advanced Robotics: Navigation and Vision
 ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
CSC263 Week 8. Larry Zhang.
 CSC263 Week 8 Larry Zhang http://goo.gl/forms/s9yie3597b Announcements (strike related) Lectures go as normal Tutorial this week everyone go to BA32 (T8, F2, F2, F3) Problem sets / Assignments are submitted
CSC263 Week 8 Larry Zhang http://goo.gl/forms/s9yie3597b Announcements (strike related) Lectures go as normal Tutorial this week everyone go to BA32 (T8, F2, F2, F3) Problem sets / Assignments are submitted
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Announcements Problem Set 4 is out!
 CSC263 Week 8 Announcements Problem Set 4 is out! Due Tuesday (Nov 17) Other Announcements Drop date Nov 8 Final exam schedule is posted CSC263 exam Dec 11, 2-5pm This week s outline Graphs BFS Graph A
CSC263 Week 8 Announcements Problem Set 4 is out! Due Tuesday (Nov 17) Other Announcements Drop date Nov 8 Final exam schedule is posted CSC263 exam Dec 11, 2-5pm This week s outline Graphs BFS Graph A
Lecture 9 Graph Traversal
 Lecture 9 Graph Traversal Euiseong Seo (euiseong@skku.edu) SWE00: Principles in Programming Spring 0 Euiseong Seo (euiseong@skku.edu) Need for Graphs One of unifying themes of computer science Closely
Lecture 9 Graph Traversal Euiseong Seo (euiseong@skku.edu) SWE00: Principles in Programming Spring 0 Euiseong Seo (euiseong@skku.edu) Need for Graphs One of unifying themes of computer science Closely
CS 310 Advanced Data Structures and Algorithms
 CS 31 Advanced Data Structures and Algorithms Graphs July 18, 17 Tong Wang UMass Boston CS 31 July 18, 17 1 / 4 Graph Definitions Graph a mathematical construction that describes objects and relations
CS 31 Advanced Data Structures and Algorithms Graphs July 18, 17 Tong Wang UMass Boston CS 31 July 18, 17 1 / 4 Graph Definitions Graph a mathematical construction that describes objects and relations
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Graphs & Digraphs Tuesday, November 06, 2007
 Graphs & Digraphs Tuesday, November 06, 2007 10:34 PM 16.1 Directed Graphs (digraphs) like a tree but w/ no root node & no guarantee of paths between nodes consists of: nodes/vertices - a set of elements
Graphs & Digraphs Tuesday, November 06, 2007 10:34 PM 16.1 Directed Graphs (digraphs) like a tree but w/ no root node & no guarantee of paths between nodes consists of: nodes/vertices - a set of elements
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
CSE 373: Data Structures and Algorithms
 CSE 373: Data Structures and Algorithms Lecture 15: Graph Data Structures, Topological Sort, and Traversals (DFS, BFS) Instructor: Lilian de Greef Quarter: Summer 2017 Today: Announcements Graph data structures
CSE 373: Data Structures and Algorithms Lecture 15: Graph Data Structures, Topological Sort, and Traversals (DFS, BFS) Instructor: Lilian de Greef Quarter: Summer 2017 Today: Announcements Graph data structures
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
CS 206 Introduction to Computer Science II
 CS 206 Introduction to Computer Science II 04 / 06 / 2018 Instructor: Michael Eckmann Today s Topics Questions? Comments? Graphs Definition Terminology two ways to represent edges in implementation traversals
CS 206 Introduction to Computer Science II 04 / 06 / 2018 Instructor: Michael Eckmann Today s Topics Questions? Comments? Graphs Definition Terminology two ways to represent edges in implementation traversals
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT
 CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT PROJECT 3 500 Internal Error problems Hopefully all resolved (or close to) P3P1 grades are up (but muted) Leave canvas comment Emails tomorrow End of quarter GRAPHS
CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT PROJECT 3 500 Internal Error problems Hopefully all resolved (or close to) P3P1 grades are up (but muted) Leave canvas comment Emails tomorrow End of quarter GRAPHS
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
ME512: Mobile Robotics Path Planning Algorithms. Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna
 ME512: Mobile Robotics Path Planning Algorithms Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna Path Planning Problem Given Robot state Obstacle positions Robot capabilities
ME512: Mobile Robotics Path Planning Algorithms Atul Thakur, Assistant Professor Mechanical Engineering Department IIT Patna Path Planning Problem Given Robot state Obstacle positions Robot capabilities
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
The goal of this assignment is to implement and test Breadth-first search (BFS) on a simple navigation problem (path-finding).
 on a simple navigation problem (path-finding).") CSCE 420 Programing Assignment #1 due: Thurs, Sept 18 (by start of class) Objective The goal of this assignment is to implement and test Breadth-first search (BFS) on a simple navigation problem (path-finding).
CSCE 420 Programing Assignment #1 due: Thurs, Sept 18 (by start of class) Objective The goal of this assignment is to implement and test Breadth-first search (BFS) on a simple navigation problem (path-finding).
UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE
 UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE Department of Electrical and Computer Engineering ECGR 4161/5196 Introduction to Robotics Experiment No. 5 A* Path Planning Overview: The purpose of this experiment
UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE Department of Electrical and Computer Engineering ECGR 4161/5196 Introduction to Robotics Experiment No. 5 A* Path Planning Overview: The purpose of this experiment
Homework No. 4 Answers
 Homework No. 4 Answers CSCI 4470/6470 Algorithms, CS@UGA, Spring 2018 Due Thursday March 29, 2018 There are 100 points in total. 1. (20 points) Consider algorithm DFS (or algorithm To-Start-DFS in Lecture
Homework No. 4 Answers CSCI 4470/6470 Algorithms, CS@UGA, Spring 2018 Due Thursday March 29, 2018 There are 100 points in total. 1. (20 points) Consider algorithm DFS (or algorithm To-Start-DFS in Lecture
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
Module 11: Additional Topics Graph Theory and Applications
 Module 11: Additional Topics Graph Theory and Applications Topics: Introduction to Graph Theory Representing (undirected) graphs Basic graph algorithms 1 Consider the following: Traveling Salesman Problem
Module 11: Additional Topics Graph Theory and Applications Topics: Introduction to Graph Theory Representing (undirected) graphs Basic graph algorithms 1 Consider the following: Traveling Salesman Problem
9/17/2015 7:56 AM. CSCE 625 Programing Assignment #1 due: Tues, Sep 22 (by start of class) Objective
 Objective") CSCE 625 Programing Assignment #1 due: Tues, Sep 22 (by start of class) Objective The goal of this assignment is to implement and compare the performance of Breadth-first search (BFS), Depth-First Search
CSCE 625 Programing Assignment #1 due: Tues, Sep 22 (by start of class) Objective The goal of this assignment is to implement and compare the performance of Breadth-first search (BFS), Depth-First Search
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
TIE Graph algorithms
 TIE-20106 239 11 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
TIE-20106 239 11 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
TIE Graph algorithms
 TIE-20106 1 1 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
TIE-20106 1 1 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
CS 220: Discrete Structures and their Applications. graphs zybooks chapter 10
 CS 220: Discrete Structures and their Applications graphs zybooks chapter 10 directed graphs A collection of vertices and directed edges What can this represent? undirected graphs A collection of vertices
CS 220: Discrete Structures and their Applications graphs zybooks chapter 10 directed graphs A collection of vertices and directed edges What can this represent? undirected graphs A collection of vertices
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Outlines: Graphs Part-2
 Elementary Graph Algorithms PART-2 1 Outlines: Graphs Part-2 Graph Search Methods Breadth-First Search (BFS): BFS Algorithm BFS Example BFS Time Complexity Output of BFS: Shortest Path Breath-First Tree
Elementary Graph Algorithms PART-2 1 Outlines: Graphs Part-2 Graph Search Methods Breadth-First Search (BFS): BFS Algorithm BFS Example BFS Time Complexity Output of BFS: Shortest Path Breath-First Tree
Graph Algorithms. Chapter 22. CPTR 430 Algorithms Graph Algorithms 1
 Graph Algorithms Chapter 22 CPTR 430 Algorithms Graph Algorithms Why Study Graph Algorithms? Mathematical graphs seem to be relatively specialized and abstract Why spend so much time and effort on algorithms
Graph Algorithms Chapter 22 CPTR 430 Algorithms Graph Algorithms Why Study Graph Algorithms? Mathematical graphs seem to be relatively specialized and abstract Why spend so much time and effort on algorithms
Lecture 26: Graphs: Traversal (Part 1)
") CS8 Integrated Introduction to Computer Science Fisler, Nelson Lecture 6: Graphs: Traversal (Part ) 0:00 AM, Apr, 08 Contents Introduction. Definitions........................................... Representations.......................................
CS8 Integrated Introduction to Computer Science Fisler, Nelson Lecture 6: Graphs: Traversal (Part ) 0:00 AM, Apr, 08 Contents Introduction. Definitions........................................... Representations.......................................
Discrete search algorithms
 Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Robot Autonomy (16-662, S13) Lecture#08 (Monday February 11) Discrete search algorithms Lecturer: Siddhartha Srinivasa Scribes: Kavya Suresh & David Matten I. INTRODUCTION These notes contain a detailed
Graph Search Methods. Graph Search Methods
 Graph Search Methods A vertex u is reachable from vertex v iff there is a path from v to u. 0 Graph Search Methods A search method starts at a given vertex v and visits/labels/marks every vertex that is
Graph Search Methods A vertex u is reachable from vertex v iff there is a path from v to u. 0 Graph Search Methods A search method starts at a given vertex v and visits/labels/marks every vertex that is
Lecture 8: PATHS, CYCLES AND CONNECTEDNESS
 Discrete Mathematics August 20, 2014 Lecture 8: PATHS, CYCLES AND CONNECTEDNESS Instructor: Sushmita Ruj Scribe: Ishan Sahu & Arnab Biswas 1 Paths, Cycles and Connectedness 1.1 Paths and Cycles 1. Paths
Discrete Mathematics August 20, 2014 Lecture 8: PATHS, CYCLES AND CONNECTEDNESS Instructor: Sushmita Ruj Scribe: Ishan Sahu & Arnab Biswas 1 Paths, Cycles and Connectedness 1.1 Paths and Cycles 1. Paths
An Appropriate Search Algorithm for Finding Grid Resources
 An Appropriate Search Algorithm for Finding Grid Resources Olusegun O. A. 1, Babatunde A. N. 2, Omotehinwa T. O. 3,Aremu D. R. 4, Balogun B. F. 5 1,4 Department of Computer Science University of Ilorin,
An Appropriate Search Algorithm for Finding Grid Resources Olusegun O. A. 1, Babatunde A. N. 2, Omotehinwa T. O. 3,Aremu D. R. 4, Balogun B. F. 5 1,4 Department of Computer Science University of Ilorin,
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
CSC 2114: Artificial Intelligence Search
 CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
CSC 2114: Artificial Intelligence Search Ernest Mwebaze emwebaze@cit.ac.ug Office: Block A : 3 rd Floor [Slide Credit Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. Reference materials
CS 4100 // artificial intelligence
 CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
CS 4100 // artificial intelligence instructor: byron wallace Search I Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks to John DeNero
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
CSE 100: GRAPH SEARCH
 CSE 100: GRAPH SEARCH Announcements PA3 released Checkpoint due Tuesday, May 5 @10:00pm Final submission due Thursday, May 14 @10:00PM Start early! Start early! Start early! Start early! Start early! I
CSE 100: GRAPH SEARCH Announcements PA3 released Checkpoint due Tuesday, May 5 @10:00pm Final submission due Thursday, May 14 @10:00PM Start early! Start early! Start early! Start early! Start early! I
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Chapter 3: Solving Problems by Searching
 Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
CS24 Week 8 Lecture 1
 CS24 Week 8 Lecture 1 Kyle Dewey Overview Tree terminology Tree traversals Implementation (if time) Terminology Node The most basic component of a tree - the squares Edge The connections between nodes
CS24 Week 8 Lecture 1 Kyle Dewey Overview Tree terminology Tree traversals Implementation (if time) Terminology Node The most basic component of a tree - the squares Edge The connections between nodes
CSE 100: GRAPH ALGORITHMS
 CSE 100: GRAPH ALGORITHMS 2 Graphs: Example A directed graph V5 V = { V = E = { E Path: 3 Graphs: Definitions A directed graph V5 V6 A graph G = (V,E) consists of a set of vertices V and a set of edges
CSE 100: GRAPH ALGORITHMS 2 Graphs: Example A directed graph V5 V = { V = E = { E Path: 3 Graphs: Definitions A directed graph V5 V6 A graph G = (V,E) consists of a set of vertices V and a set of edges
Dijkstra s Algorithm and Priority Queue Implementations. CSE 101: Design and Analysis of Algorithms Lecture 5
 Dijkstra s Algorithm and Priority Queue Implementations CSE 101: Design and Analysis of Algorithms Lecture 5 CSE 101: Design and analysis of algorithms Dijkstra s algorithm and priority queue implementations
Dijkstra s Algorithm and Priority Queue Implementations CSE 101: Design and Analysis of Algorithms Lecture 5 CSE 101: Design and analysis of algorithms Dijkstra s algorithm and priority queue implementations
Algorithms for Data Structures: Uninformed Search. Phillip Smith 19/11/2013
 lgorithms for Data Structures: Uninformed Search Phillip Smith 19/11/2013 Representations for Reasoning We know (at least) two models of a world: model of the static states of the world model of the effects
lgorithms for Data Structures: Uninformed Search Phillip Smith 19/11/2013 Representations for Reasoning We know (at least) two models of a world: model of the static states of the world model of the effects
Graphs. Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale Room - Faner 3131
 Graphs Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale tessema.mengistu@siu.edu Room - Faner 3131 1 Outline Introduction to Graphs Graph Traversals Finding a
Graphs Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale tessema.mengistu@siu.edu Room - Faner 3131 1 Outline Introduction to Graphs Graph Traversals Finding a
Assignment 1 is out! Due: 9 Sep 23:59! Can work in a group of 2-3 students.! NO cheating!!!! Submit in turnitin! Code + report!
 Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Hi everyone. I hope everyone had a good Fourth of July. Today we're going to be covering graph search. Now, whenever we bring up graph algorithms, we
 Hi everyone. I hope everyone had a good Fourth of July. Today we're going to be covering graph search. Now, whenever we bring up graph algorithms, we have to talk about the way in which we represent the
Hi everyone. I hope everyone had a good Fourth of July. Today we're going to be covering graph search. Now, whenever we bring up graph algorithms, we have to talk about the way in which we represent the
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Breadth First Search. cse2011 section 13.3 of textbook
 Breadth irst Search cse section. of textbook Graph raversal (.) Application example Given a graph representation and a vertex s in the graph, find all paths from s to the other vertices. wo common graph
Breadth irst Search cse section. of textbook Graph raversal (.) Application example Given a graph representation and a vertex s in the graph, find all paths from s to the other vertices. wo common graph
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Announcements. HW3 is graded. Average is 81%
 CSC263 Week 9 Announcements HW3 is graded. Average is 81% Announcements Problem Set 4 is due this Tuesday! Due Tuesday (Nov 17) Recap The Graph ADT definition and data structures BFS gives us single-source
CSC263 Week 9 Announcements HW3 is graded. Average is 81% Announcements Problem Set 4 is due this Tuesday! Due Tuesday (Nov 17) Recap The Graph ADT definition and data structures BFS gives us single-source
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Robotic Motion Planning: A* and D* Search
 Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Announcements. Project 0: Python Tutorial Due last night
 Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
Announcements Project 0: Python Tutorial Due last night HW1 officially released today, but a few people have already started on it Due Monday 2/6 at 11:59 pm P1: Search not officially out, but some have
Notes. Video Game AI: Lecture 5 Planning for Pathfinding. Lecture Overview. Knowledge vs Search. Jonathan Schaeffer this Friday
 Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Uniformed Search (cont.)
") Uniformed Search (cont.) Computer Science cpsc322, Lecture 6 (Textbook finish 3.5) Sept, 16, 2013 CPSC 322, Lecture 6 Slide 1 Lecture Overview Recap DFS vs BFS Uninformed Iterative Deepening (IDS) Search
Uniformed Search (cont.) Computer Science cpsc322, Lecture 6 (Textbook finish 3.5) Sept, 16, 2013 CPSC 322, Lecture 6 Slide 1 Lecture Overview Recap DFS vs BFS Uninformed Iterative Deepening (IDS) Search
Homework Assignment #3 Graph
 CISC 4080 Computer Algorithms Spring, 2019 Homework Assignment #3 Graph Some of the problems are adapted from problems in the book Introduction to Algorithms by Cormen, Leiserson and Rivest, and some are
CISC 4080 Computer Algorithms Spring, 2019 Homework Assignment #3 Graph Some of the problems are adapted from problems in the book Introduction to Algorithms by Cormen, Leiserson and Rivest, and some are
Computer Science and Software Engineering University of Wisconsin - Platteville. 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville
 CS 3030 Lecture Notes Yan Shi UW-Platteville") Computer Science and Software Engineering University of Wisconsin - Platteville 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville Read: Textbook Chapter 3.7-3.9,3.12, 4. Problem Solving as
Computer Science and Software Engineering University of Wisconsin - Platteville 3. Search (Part 1) CS 3030 Lecture Notes Yan Shi UW-Platteville Read: Textbook Chapter 3.7-3.9,3.12, 4. Problem Solving as
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Chapter 22 Elementary Graph Algorithms
 Chapter 22 Elementary Graph Algorithms Graph Representations Graph G = (V,E) Directed Undirected Adjacency Lists Adjacency Matrix Graph Representations Adjacency List: Undirected Memory: Adjacency: Graph
Chapter 22 Elementary Graph Algorithms Graph Representations Graph G = (V,E) Directed Undirected Adjacency Lists Adjacency Matrix Graph Representations Adjacency List: Undirected Memory: Adjacency: Graph
CAP 4630 Artificial Intelligence
 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
This course is intended for 3rd and/or 4th year undergraduate majors in Computer Science.
 Lecture 9 Graphs This course is intended for 3rd and/or 4th year undergraduate majors in Computer Science. You need to be familiar with the design and use of basic data structures such as Lists, Stacks,
Lecture 9 Graphs This course is intended for 3rd and/or 4th year undergraduate majors in Computer Science. You need to be familiar with the design and use of basic data structures such as Lists, Stacks,
Graph definitions. There are two kinds of graphs: directed graphs (sometimes called digraphs) and undirected graphs. An undirected graph
 and undirected graphs. An undirected graph") Graphs Graph definitions There are two kinds of graphs: directed graphs (sometimes called digraphs) and undirected graphs start Birmingham 60 Rugby fill pan with water add salt to water take egg from fridge
Graphs Graph definitions There are two kinds of graphs: directed graphs (sometimes called digraphs) and undirected graphs start Birmingham 60 Rugby fill pan with water add salt to water take egg from fridge
The big picture: from Perception to Planning to Control
 The big picture: from Perception to Planning to Control Perception Location, Map Signals: video, inertial, range Sensors Real World 1 Planning vs Control 0. In control we go from to A to B in free space
The big picture: from Perception to Planning to Control Perception Location, Map Signals: video, inertial, range Sensors Real World 1 Planning vs Control 0. In control we go from to A to B in free space
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
- Logic and Algorithms - Graph Algorithms
 Fundamentals of Computer Sience and Digital Communications - Logic and Algorithms - Graph Algorithms Johan Larsson Marco Loh 22..24 Overview What is a Graph? Representations of Graphs Breadth-first Search
Fundamentals of Computer Sience and Digital Communications - Logic and Algorithms - Graph Algorithms Johan Larsson Marco Loh 22..24 Overview What is a Graph? Representations of Graphs Breadth-first Search
Trees Algorhyme by Radia Perlman
 Algorhyme by Radia Perlman I think that I shall never see A graph more lovely than a tree. A tree whose crucial property Is loop-free connectivity. A tree which must be sure to span. So packets can reach
Algorhyme by Radia Perlman I think that I shall never see A graph more lovely than a tree. A tree whose crucial property Is loop-free connectivity. A tree which must be sure to span. So packets can reach
Graph Search Methods. Graph Search Methods
 Graph Search Methods A vertex u is reachable from vertex v iff there is a path from v to u. 0 Graph Search Methods A search method starts at a given vertex v and visits/labels/marks every vertex that is
Graph Search Methods A vertex u is reachable from vertex v iff there is a path from v to u. 0 Graph Search Methods A search method starts at a given vertex v and visits/labels/marks every vertex that is
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
CSE 373: Data Structures and Algorithms
 CSE 373: Data Structures and Algorithms Lecture 6: Dijkstra s Algorithm (Graphs) Instructor: Lilian de Greef Quarter: Summer 207 Today Announcements Graph Traversals Continued Remarks on DFS & BFS Shortest
CSE 373: Data Structures and Algorithms Lecture 6: Dijkstra s Algorithm (Graphs) Instructor: Lilian de Greef Quarter: Summer 207 Today Announcements Graph Traversals Continued Remarks on DFS & BFS Shortest
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Chapter 12. Path Planning. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012,
 Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Chapter 9 STACK, QUEUE
 Chapter 9 STACK, QUEUE 1 LIFO: Last In, First Out. Stacks Restricted form of list: Insert and remove only at front of list. Notation: Insert: PUSH Remove: POP The accessible element is called TOP. Stack
Chapter 9 STACK, QUEUE 1 LIFO: Last In, First Out. Stacks Restricted form of list: Insert and remove only at front of list. Notation: Insert: PUSH Remove: POP The accessible element is called TOP. Stack
Problem Solving as Search. CMPSCI 383 September 15, 2011
 Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
UNINFORMED SEARCH. Announcements Reading Section 3.4, especially 3.4.1, 3.4.2, 3.4.3, 3.4.5
 UNINFORMED SEARCH Announcements Reading Section 3.4, especially 3.4.1, 3.4.2, 3.4.3, 3.4.5 Robbie has no idea where room X is, and may have little choice but to try going down this corridor and that. On
UNINFORMED SEARCH Announcements Reading Section 3.4, especially 3.4.1, 3.4.2, 3.4.3, 3.4.5 Robbie has no idea where room X is, and may have little choice but to try going down this corridor and that. On
CS 106X, Lecture 23 Dijkstra and A* Search
 CS 106X, Lecture 23 Dijkstra and A* Search reading: Programming Abstractions in C++, Chapter 18 This document is copyright (C) Stanford Computer Science and Nick Troccoli, licensed under Creative Commons
CS 106X, Lecture 23 Dijkstra and A* Search reading: Programming Abstractions in C++, Chapter 18 This document is copyright (C) Stanford Computer Science and Nick Troccoli, licensed under Creative Commons
(Re)Introduction to Graphs and Some Algorithms
Introduction to Graphs and Some Algorithms") (Re)Introduction to Graphs and Some Algorithms Graph Terminology (I) A graph is defined by a set of vertices V and a set of edges E. The edge set must work over the defined vertices in the vertex set.
(Re)Introduction to Graphs and Some Algorithms Graph Terminology (I) A graph is defined by a set of vertices V and a set of edges E. The edge set must work over the defined vertices in the vertex set.