Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
|
|
|
- Clarence Little
- 6 years ago
- Views:
Transcription
1 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N

2 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf Isermann

3 Mechanical and Information Processing [Ref.] Prof. Rolf Isermann
4 Conventional vs. Mechatronic Design [Ref.] Prof. Rolf Isermann

5 Mechatronic System Integration [Ref.] Prof. Rolf Isermann
6 Multi-Level Control Architecture Level 1 low level control (feedforward, feedback for damping, stabilization, linearization) Level 2 high level control (advanced feedback control strategies) Level 3 supervision, including fault diagnosis Level 4 optimization, coordination (of processes) Level 5 general process management [Ref.] Prof. Rolf Isermann
7 [Ref.] Prof. Rolf Isermann
8 Design Steps [Ref.] Prof. Rolf Isermann
9 Mathematical Models Mathematical process models for static and dynamic behavior are required for various steps in the design of mechatronic systems, such as simulation, control design, and reconstruction of variables. There are two ways to obtain these models: Theoretical modeling based on first (physical) principles Experimental modeling (identification) with measured input and output variables [Ref.] Prof. Rolf Isermann
10 Simulation Methods [Ref.] Prof. Rolf Isermann
11 Real-Time Simulation [Ref.] Prof. Rolf Isermann
12 Hardware-In-the-Loop (HIL) The hardware-in-the-loop simulation (HIL) is characterized by operating real components in connection with real-time simulated components. Usually, the control system hardware and software is the real system, as used for series production. The controlled process (consisting of actuators, physical processes, and sensors) can either comprise simulated components or real components,
13 PC-Based Hardware-in-the-Loop Simulation
14 Control Prototyping For the design and testing of complex control systems and their algorithms under real-time constraints, a real-time controller simulation (emulation) with hardware (e.g., off-the-shelf signal processor) other than the final series production hardware (e.g., special ASICS) may be performed. The process, the actuators, and sensors can then be real. This is called control prototyping
15 Real-Time Simulation [Ref.] Prof. Rolf Isermann
16 Integrated Design Issues Concurrent engineering of the mechatronics approach relies heavily on the use of system modeling and simulation throughout the design and prototyping stages. It is especially important that it be programmed in a visually intuitive environment. block diagrams, flow charts, state transition diagrams, and bond graphs.
17 Integrated Design Issues Mechatronics is a design philosophy: an integrating approach to engineering design. Mechatronics makes the combination of actuators, sensors, control systems, and computers in the design process possible. Starting with basic design and progressing through the manufacturing phase, mechatronic design optimizes the parameters at each phase to produce a quality product in a short-cycle time
18 Modeling vs. Experimental Validation [Ref.] Craig and Stolfi
19 Hardware and Software Integration [Ref.] Prof. Divdas Shetty
20 Concurrent Engineering Concurrent engineering is a design approach in which the design and manufacture of a product are merged in a special way. It is necessary that the knowledge and necessary information be coordinated amongst different expert groups. The characteristics of concurrent engineering are Better definition of the product without late changes. Design for manufacturing and assembly undertaken in the early design stage. Process on how the product development is well defined. Better cost estimates. Decrease in the barriers between design and manufacturing.
21 Concurrent Engineering [Ref.] Bradley
22 Mechatronic Design Process [Ref.] Prof. Divdas Shetty
23 Computer-Aided Systems: Important Features Modeling: Block diagrams for working with understandable multi-disciplinary models that represent a physical phenomenon. Simulation: Numerical methods for solving models containing differential, discrete, linear, and nonlinear equations. Project Management: Database for maintaining project information and subsystem models for eventual reuse. Design: Numerical methods for constrained optimization of performance functions based on model parameters and signals.
24 Computer-Aided Systems: Important Features Analysis: Frequency-domain and time-domain tools Real-Time Interface: A plug-in card is used to replace part of the model with actual hardware by interfacing to it with actuators and sensors. Code Generator: Produces efficient high-level source code (such as C/C++) from the block diagram. The control code will be compiled and used on the embedded processor. Embedded Processor Interface: Communication between the process and the computer-aided prototyping environment.
25 Mechatronic Key Elements Information Systems Modeling and Simulation Optimization Mechanical Systems Electrical Systems DC and AC Analysis Power Sensors and actuators Real-Time Interfacing
26 Information Systems Information systems include all aspects for information exchange Signal processing, control systems, and analysis techniques The following are essential for mechatronics applications Modeling and Simulation Automatic control Numerical methods for optimization.
27 Information Systems: Modeling Modeling is the process of representing the behavior of a real system by a collection of mathematical equations and logic. Models can be static or dynamic Static models produce no motion, heat transfer, fluid flow, traveling waves, or any other changes. Dynamic models have energy transfer which results in power flow. This causes motion, heat transfer, and other phenomena that change in time. Models are cause-and-effect structures they accept external information and process it with their logic and equations to produce one or more outputs. Parameter is a fixed-value unit of information Signal is a changing-unit of information Models can be text-based programming or block diagrams
28 Information Systems: Simulation Simulation is the process of solving the model and is performed on a computer. Simulation process can be divided into three sections: Initialization Iteration, Termination.
29 Information Systems: Optimization Optimization solves the problem of distributing limited resources throughout a system so that pre-specified aspects of its behavior are satisfied. Resources are referred to as design variables, aspects of system behavior as objectives, and system governing relationships (equations and logic) as constraints. Example: Objective: Maximize V (volume) V (L, W, H) Constraints: System relationship: V = LHW 0 < L < 40, 0 < W < 30, 0 < H < 20
30 Mechanical Systems Mechanical systems are concerned with the behavior of matter under the action of forces. Such systems are categorized as rigid, deformable, or fluid in nature. Rigid-bodies assume all bodies and connections in the system to be perfectly rigid. (i.e. do not deform) Fluid mechanics consists of compressible and incompressible fluids. Newtonian mechanics provides the basis for most mechanical systems and consists of three independent and absolute concepts: Space, Time, and Mass. Force, is also present but is not independent of the other three
31 Mechanics: Six Fundamental Laws 1. Newton s First Law 2. Newton s Second Law 3. Newton s Third Law 4. Newton s Law of Gravitation 5. Parallelogram Law for the Addition of Forces 6. Principle of Transmissibility
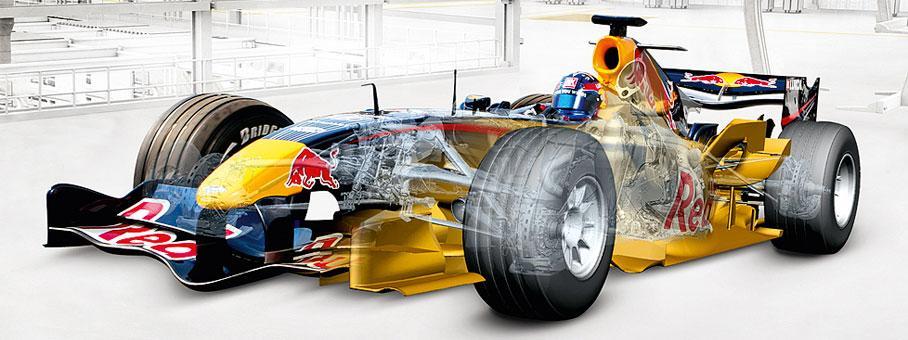
32 Electrical Systems Electrical systems are concerned with the behavior of three fundamental quantities: Charge, current, and voltage Electrical systems consist of two categories: Power systems and Communication systems An electric circuit is a closed network of paths through which current flows. Circuit analysis is the process of calculating all voltages and currents in a circuit given as is based on two fundamental laws : Kirchhoff s current law: The sum of all currents entering a node is zero. Kirchhoff s voltage law: The sum of all voltage drops around a closed loop is zero.
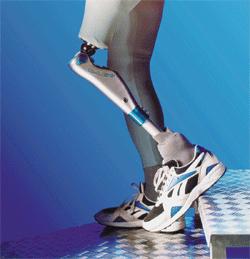
33 Electrical Systems For time-independent circuits (DC circuits), the following techniques are frequently used. Parallel and series branch reductions Node and loop analysis Voltage and current divider reductions Equivalent circuits (Thevenin and Norton equivalents) Additional techniques for time-dependent circuits, which include periodic (AC) as well as non-periodic or transient, are Phasors Natural and forced response
34 Electrical Systems: Power Energy is the capacity to do work various Potential, kinetic, electrical, heat, chemical, nuclear, and radiant. Power is the rate of energy transfer, and in the SI unit system, the unit of energy is the joule and the unit of power is the watt (1 watt 1 joule per second).
35 Sensors Sensors are required to monitor the performance of machines and processes Common variables in mechatronic systems are temperature, speed, position, force, torque, and acceleration. Important characteristics: the dynamics of the sensor, stability, resolution, precision, robustness, size, and signal processing. Intelligent sensors are available that not only sense information but process it well Progress in semiconductor manufacturing technology has made it possible to integrate sensor and the signal processing on one chip Sensors are able to ascertain conditions instantaneously and accurately These sensors facilitate operations normally performed by the control algorithm, which include automatic noise filtering, linearization sensitivity, and selfcalibration.
36 Actuators Actuation involves a physical action on a machine or process. They can transform electrical inputs into mechanical outputs such as force, angle, and position. Actuators can be classified into three general groups. 1. Electromagnetic actuators, (e.g., AC and DC electrical motors, stepper motors, electromagnets) 2. Fluid power actuators, (e.g., hydraulics, pneumatics) 3. Unconventional actuators (e.g., piezoelectric, magnetostrictive, memory metal)
37 Real-Time Interfacing Real-time interface provides data acquisition and control functions for the computer. Reconstruct a sensor waveform as a digital sequence and make it available to the computer software for processing. The control function produces an analog approximation as a series of small steps. Real-time interfacing includes: A/D and D/A conversions Analog signal conditioning circuits Sampling theory.
38 MECHATRONIC APPLICATIONS
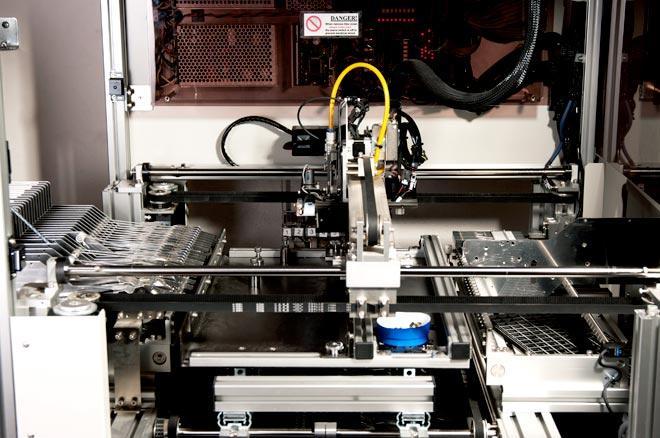
39 Automotive Industry Vehicle diagnostics and monitoring. Sensors to detect the environment; monitor engine coolant, temperature and quality; Engine oil pressure, level, and quality; tire pressure; brake pressure. Pressure, temperature sensing in various engine and power locations; exhaust gas analysis and control; Crankshaft positioning; Fuel pump pressure and fuel injection control; Transmission force and pressure control. Airbag safety deployment system. Micro-accelerometers and inertia sensors mounted on the chassis of the car measures car deceleration in x or y directions can assist in airbag deployment. Antilock brake system, cruise control. Position sensors to facilitate antilock braking system; Displacement and position sensors in suspension systems. Seat control for comfort and convenience. Displacement sensors and micro actuators for seat control; Sensors for air quality, temperature and humidity, Sensors for defogging of windshields.
40 Health Care Industry Medical diagnostic systems, non-invasive probes such as ultrasonic probe. Disposable blood pressure transducer; Pressure sensors in several diagnostic probes. Systems to control the intravenous fluids and drug flow; Endoscopic and orthopedic surgery. Angioplasty pressure sensor; Respirators; Lung capacity meters. Other products such as Kidney dialysis equipment; MRI equipment.


41 Robots
42 Aerospace Industry Landing gear systems; Cockpit instrumentation; Pressure sensors for oil, fuel, transmission; Air speed monitor; Altitude determination and control systems. Fuel efficiency and safety systems; Propulsion control with pressure sensors; Chemical leak detectors; Thermal monitoring and control systems. Inertial guidance systems; Accelerometers; Fiber-optic gyroscopes for guidance and monitoring. Automatic guided vehicles, space application; Use of automated navigation system for NASA projects; Use of automated systems in under water monitoring and control




43 Consumer Products
44 Consumer Industry Consumer products such as auto focus camera, video, and CD players; Consumer electronic products such as washing machines and dish washers. Video game entertainment systems; Virtual instrumentation in home entertainment. Home support systems; Garage door opener; Sensors with heating, ventilation, and air-conditioning system; Home security systems.


45 Production Machines
46 Industrial Systems and Products Monitoring and control of the manufacturing process; CNC machine tools; Advanced high speed machining and quality monitoring. Rapid prototyping; Manufacturing cost saving by rapid creation of models done by CAD/CAM integration and rapid prototyping equipment. Specialized manufacturing process such as the use of welding robots; Procedure for automatically programming and controlling a robot from CAD data.

47 3D Printing

48 Mechatronic System Example: DC Motor [Ref.] Prof. Divdas Shetty
49 Conclusion Mechatronics design can lead to high quality and cost effective products Traditional sequential manner do not possess optimum design capabilities. Concurrent design results in the development of intelligent and flexible mechatronic system Increasing demands on the productivity of machine tools and their growing technological complexity call for improved methods in future product development processes.
What is Mechatronics
 Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
College of Computing, Engineering & Construction Electrical Engineering Course Descriptions
 CATALOG 2010-2011 Undergraduate Information College of Computing, Engineering & Construction Electrical Engineering Course Descriptions EEE3308: Electronic Circuits I 3 Prerequisite: EEL 3111. This course
CATALOG 2010-2011 Undergraduate Information College of Computing, Engineering & Construction Electrical Engineering Course Descriptions EEE3308: Electronic Circuits I 3 Prerequisite: EEL 3111. This course
27/05/2016 Friday AN5102: Advanced Digital System Design 06/06/2016 Monday MA5131: Applied Mathematics for Electronics Engineers
 04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
CHAPTER 1: REAL TIME COMPUTER CONTROL
 CHAPTER 1 Page 1 ENGG4420 LECTURE 2 September 08 10 12:49 PM CHAPTER 1: REAL TIME COMPUTER CONTROL REFERENCES: G. F. Franklin et al., ``Feedback Control of Dynamic Systems,`` 5th Edition, Pearson, 2006.
CHAPTER 1 Page 1 ENGG4420 LECTURE 2 September 08 10 12:49 PM CHAPTER 1: REAL TIME COMPUTER CONTROL REFERENCES: G. F. Franklin et al., ``Feedback Control of Dynamic Systems,`` 5th Edition, Pearson, 2006.
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
ELEC 5260/6260/6266 Embedded Computing Systems
 ELEC 5260/6260/6266 Embedded Computing Systems Spring 2019 Victor P. Nelson Text: Computers as Components, 4 th Edition Prof. Marilyn Wolf (Georgia Tech) Course Web Page: http://www.eng.auburn.edu/~nelsovp/courses/elec5260_6260/
ELEC 5260/6260/6266 Embedded Computing Systems Spring 2019 Victor P. Nelson Text: Computers as Components, 4 th Edition Prof. Marilyn Wolf (Georgia Tech) Course Web Page: http://www.eng.auburn.edu/~nelsovp/courses/elec5260_6260/
Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears
 Application Note Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears Location/Country: Lindenberg, Deutschland GOM system: ARAMIS GOM software: ARAMIS Professional
Application Note Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears Location/Country: Lindenberg, Deutschland GOM system: ARAMIS GOM software: ARAMIS Professional
ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER
 SIMULATION TOOL: GT-POWER") CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
Actuator Power Systems for MEA
 Power Matters. TM Actuator Power Systems for MEA 1 Introduction to More Electric Aircrafts WHY? Reduce maintenance costs Reduce fuel burn and environmental impact Improve safety and reliability HOW are
Power Matters. TM Actuator Power Systems for MEA 1 Introduction to More Electric Aircrafts WHY? Reduce maintenance costs Reduce fuel burn and environmental impact Improve safety and reliability HOW are
BIOMEDICAL ELECTRONICS. Date & Day II - SEMESTER ADVANCED MEDICAL IMAGING DIAGNOSTIC AND THERAPEUTIC EQUIPMENT MEDICAL PRODUCT DESIGN
 OSMANIA UNIVERSITY, HYDERABAD - 7 M. E. (BME) (Main) Examination, September 2013 Time : 2.00 PM to 5.00 PM Department of BME Date & Day BIOMEDICAL ELECTRONICS II - SEMESTER ADVANCED MEDICAL IMAGING DIAGNOSTIC
OSMANIA UNIVERSITY, HYDERABAD - 7 M. E. (BME) (Main) Examination, September 2013 Time : 2.00 PM to 5.00 PM Department of BME Date & Day BIOMEDICAL ELECTRONICS II - SEMESTER ADVANCED MEDICAL IMAGING DIAGNOSTIC
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT. Test Code: 5936 Version: 01
 CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
MECHATRONICS. William Bolton. Sixth Edition ELECTRONIC CONTROL SYSTEMS ENGINEERING IN MECHANICAL AND ELECTRICAL PEARSON
 MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
Massachusetts Institute of Technology Department of Mechanical Engineering Modeling and Simulation of Dynamic Systems
 INTRODUCTION GOAL OF THE SUBJECT Massachusetts Institute of Technology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems Methods for mathematical modeling of engineering
INTRODUCTION GOAL OF THE SUBJECT Massachusetts Institute of Technology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems Methods for mathematical modeling of engineering
0.1 Slow Monitoring and Recording System
 0.1 Slow Monitoring and Recording System A slow monitoring and control system is required to control systematic effects that could impact the experiment, to allow automated scans of parameters such as
0.1 Slow Monitoring and Recording System A slow monitoring and control system is required to control systematic effects that could impact the experiment, to allow automated scans of parameters such as
Computer Hardware Requirements for Real-Time Applications
 Lecture (4) Computer Hardware Requirements for Real-Time Applications Prof. Kasim M. Al-Aubidy Computer Engineering Department Philadelphia University Real-Time Systems, Prof. Kasim Al-Aubidy 1 Lecture
Lecture (4) Computer Hardware Requirements for Real-Time Applications Prof. Kasim M. Al-Aubidy Computer Engineering Department Philadelphia University Real-Time Systems, Prof. Kasim Al-Aubidy 1 Lecture
Plant modeling: A First Step to Early Verification of Control Systems
 Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Principles of Engineering PLTW Scope and Sequence Year at a Glance First Semester
 PLTW Scope and Sequence Year at a Glance First Semester Three Weeks 1 st 3 weeks 2 nd 3 weeks 3 rd 3 weeks 4 th 3 weeks 5 th 3 weeks 6 th 3 weeks Topics/ Concepts 1.1 Energy Forms 1.2 Energy, Work, & Power
PLTW Scope and Sequence Year at a Glance First Semester Three Weeks 1 st 3 weeks 2 nd 3 weeks 3 rd 3 weeks 4 th 3 weeks 5 th 3 weeks 6 th 3 weeks Topics/ Concepts 1.1 Energy Forms 1.2 Energy, Work, & Power
LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications
 LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications Publish Date: Dec 29, 2008 38 Ratings 4.16 out of 5 Overview Hardware-in-the-loop (HIL) simulation is achieving a highly realistic simulation
LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications Publish Date: Dec 29, 2008 38 Ratings 4.16 out of 5 Overview Hardware-in-the-loop (HIL) simulation is achieving a highly realistic simulation
Dynamics and Vibrations (3C, 3H) Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics
 Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics") Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS
 Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS 1.1 INTRODUCTION Analysis of physical problems in any area of engineering and science involves a multipronged approach:
Lecture 1 GENERAL INTRODUCTION: HISTORICAL BACKGROUND AND SPECTRUM OF APPLICATIONS 1.1 INTRODUCTION Analysis of physical problems in any area of engineering and science involves a multipronged approach:
HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual
 Installation and Interface Manual") HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual HG4930 Installation and Interface Manual aerospace.honeywell.com/hg4930 2 Table of Contents 4 5 6 10 11 13 13 Honeywell Industrial
HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual HG4930 Installation and Interface Manual aerospace.honeywell.com/hg4930 2 Table of Contents 4 5 6 10 11 13 13 Honeywell Industrial
ELEC Sensors and Actuators
 ELEC 483-001 Sensors and Actuators Text Book: SENSORS AND ACTUATORS: System Instrumentation, C. W. d e Silva, CRC Press, ISBN: 1420044834, 2007 Kalyana C. Veluvolu #IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr
ELEC 483-001 Sensors and Actuators Text Book: SENSORS AND ACTUATORS: System Instrumentation, C. W. d e Silva, CRC Press, ISBN: 1420044834, 2007 Kalyana C. Veluvolu #IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr
Mixed-Signal Analog. C.S. Lee. Senior Vice President High-Volume Analog & Logic
 Mixed-Signal Analog C.S. Lee Senior Vice President High-Volume Analog & Logic Mixed-Signal Analog Market Total Analog TAM 2004 $31.4 Billion Standard $11.9B Vertical Applications $19.5B Market Characteristics
Mixed-Signal Analog C.S. Lee Senior Vice President High-Volume Analog & Logic Mixed-Signal Analog Market Total Analog TAM 2004 $31.4 Billion Standard $11.9B Vertical Applications $19.5B Market Characteristics
PLC Fundamentals. Module 2: Hardware and Terminology. Academic Services Unit PREPARED BY. August 2011
 PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
08/06/ /06/ /06/ /06/ /06/ /06/ /06/ /06/2018
 M.TECH. DEGREE EXAMINATIONS APR / MAY-2018 - TIME TABLE (NEW REGULATION) SEMESTER : 1 08/06/2018 09/06/2018 11/06/2018 12/06/2018 13/06/2018 14/06/2018 16/06/2018 18/06/2018 1 MECH(CAD) MT711NR - Computational
M.TECH. DEGREE EXAMINATIONS APR / MAY-2018 - TIME TABLE (NEW REGULATION) SEMESTER : 1 08/06/2018 09/06/2018 11/06/2018 12/06/2018 13/06/2018 14/06/2018 16/06/2018 18/06/2018 1 MECH(CAD) MT711NR - Computational
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
State Technical College of Missouri
 (Associate of Applied Science Degree) Experts predict that the 21 st century will continue to be dominated by unprecedented advancements in knowledge and science, largely attributable to the accelerated
(Associate of Applied Science Degree) Experts predict that the 21 st century will continue to be dominated by unprecedented advancements in knowledge and science, largely attributable to the accelerated
ID 020C: Hardware-in-Loop: System Testing Without the System
 ID 020C: Hardware-in-Loop: System Testing Without the System Applied Dynamics International Marcella Haghgooie Sr. Field Applications Engineer 13 October 2010 Version: 1.2 Marcella Haghgooie Sr. Field
ID 020C: Hardware-in-Loop: System Testing Without the System Applied Dynamics International Marcella Haghgooie Sr. Field Applications Engineer 13 October 2010 Version: 1.2 Marcella Haghgooie Sr. Field
Plant Modeling for Powertrain Control Design
 Plant Modeling for Powertrain Control Design Modelica Automotive Workshop Dearborn, MI November 19, 2002 Dr. Larry Michaels GM Powertrain Controls Engineering Challenges in PT Control Design Control System
Plant Modeling for Powertrain Control Design Modelica Automotive Workshop Dearborn, MI November 19, 2002 Dr. Larry Michaels GM Powertrain Controls Engineering Challenges in PT Control Design Control System
 VALLIAMMAI ENGINERING COLLEGE DEPARTMENT OF MECHANICAL ENGINEERING SUBJECT CODE / NAME: ME6702 / MECHATRONICS YEAR/SEM: IV /VII UNIT 1: INTRODUCTION 1. List out the types of systems. BT-1 2. Describe the
VALLIAMMAI ENGINERING COLLEGE DEPARTMENT OF MECHANICAL ENGINEERING SUBJECT CODE / NAME: ME6702 / MECHATRONICS YEAR/SEM: IV /VII UNIT 1: INTRODUCTION 1. List out the types of systems. BT-1 2. Describe the
PLC Fundamentals. Module 1: Introduction to PLC. Academic Services Unit PREPARED BY. August 2011
 PLC Fundamentals PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module Objectives Upon successful completion of this module, students will
PLC Fundamentals PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module Objectives Upon successful completion of this module, students will
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Overvoltage protection with PROTEK TVS diodes in automotive electronics
 Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
New paradigm for MEMS+IC Co-development
 New paradigm for MEMS+IC Co-development MEMS 진보된스마트세상을만듭니다. Worldwide First MEMS+IC Co-development Solution New paradigm for MEMS+IC Co-development A New Paradigm for MEMS+IC Development MEMS design
New paradigm for MEMS+IC Co-development MEMS 진보된스마트세상을만듭니다. Worldwide First MEMS+IC Co-development Solution New paradigm for MEMS+IC Co-development A New Paradigm for MEMS+IC Development MEMS design
ROBOT SENSORS. 1. Proprioceptors
 ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
PART 1: GENERAL PART 2: PRODUCT. Effective: 12/29/10 Page 1 of 6 FECA-TE-104D
 Specification Number: 23 09 33 Product Name: FRENIC-Eco AC Drives for Variable Torque Fan & Pump Applications (1-125Hp at 208/230V and 1-900Hp at 460V) PART 1: GENERAL 1.01 SUMMARY A. This specification
Specification Number: 23 09 33 Product Name: FRENIC-Eco AC Drives for Variable Torque Fan & Pump Applications (1-125Hp at 208/230V and 1-900Hp at 460V) PART 1: GENERAL 1.01 SUMMARY A. This specification
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS
 A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Simcenter Motion 3D. Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation
 Simcenter Motion 3D Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation Iurie TERNA Email: iurie.terna@siemens.com Tuesday 16:00-17:00
Simcenter Motion 3D Mechatronics - Improve Design Dynamics Performance: Combine 3D Multi-Body Simulation with 1D Actuation & Controls Simulation Iurie TERNA Email: iurie.terna@siemens.com Tuesday 16:00-17:00
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
INTEGRATED TECH FOR INDUSTRIAL POSITIONING
 INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
ACTUATING SYSTEMS BASED ON TWO BELLOWS
 ACTUATING SYSTEMS BASED ON TWO BELLOWS PhD Stud. Eng. Vasile Sergiu JIŞA, Technical University of Cluj-Napoca, e-mail: vasile_sergiu_jisa@yahoo.com Assist. PhD Eng. Beniamin CHETRAN, Technical University
ACTUATING SYSTEMS BASED ON TWO BELLOWS PhD Stud. Eng. Vasile Sergiu JIŞA, Technical University of Cluj-Napoca, e-mail: vasile_sergiu_jisa@yahoo.com Assist. PhD Eng. Beniamin CHETRAN, Technical University
FUNCTIONAL OPTIMIZATION OF WINDSHIELD WIPER MECHANISMS IN MBS (MULTI-BODY SYSTEM) CONCEPT
 CONCEPT") FUNCTIONAL OPTIMIZATION OF WINDSHIELD WIPER MECHANISMS IN MBS (MULTI-BODY SYSTEM) CONCEPT Cătălin ALEXANDRU 1 Abstract: In this paper, the functional optimization of windshield wiper mechanisms is performed,
FUNCTIONAL OPTIMIZATION OF WINDSHIELD WIPER MECHANISMS IN MBS (MULTI-BODY SYSTEM) CONCEPT Cătălin ALEXANDRU 1 Abstract: In this paper, the functional optimization of windshield wiper mechanisms is performed,
Using Cost Effective Distributed HIL for Rapid Prototyping
 Using Cost Effective Distributed HIL for Rapid Prototyping Renesas Electronics America Inc. Enabling Smart Solutions Embedded Control Systems need Hardware-in-Loop Simulation 2 Innovation using HIL Simulation
Using Cost Effective Distributed HIL for Rapid Prototyping Renesas Electronics America Inc. Enabling Smart Solutions Embedded Control Systems need Hardware-in-Loop Simulation 2 Innovation using HIL Simulation
Automotive Test Equipment
 Automotive Test Equipment Automotive Test Equipment measurement example Pedal Force Transducers LPR-C Easy to install and use on a variety of pedals Light weight design reduces effect of transducer on
Automotive Test Equipment Automotive Test Equipment measurement example Pedal Force Transducers LPR-C Easy to install and use on a variety of pedals Light weight design reduces effect of transducer on
MEMS & Advanced Analog
 MEMS & Advanced Analog Benedetto Vigna General Manager, MEMS, Sensors and High-Performance Analog Division MicroElectroMechanical Systems (MEMS) MEMS take advantage of the electrical and mechanical properties
MEMS & Advanced Analog Benedetto Vigna General Manager, MEMS, Sensors and High-Performance Analog Division MicroElectroMechanical Systems (MEMS) MEMS take advantage of the electrical and mechanical properties
SDI-5510 Vertical Flat Through Transmission Inspection System. Technical Specification
 sdi Structural Diagnostics, Inc. Technical Specification Rev E 11-11-09 SDI-5510 Vertical Flat Through Transmission Inspection System Technical Specification INTRODUCTION This specification details the
sdi Structural Diagnostics, Inc. Technical Specification Rev E 11-11-09 SDI-5510 Vertical Flat Through Transmission Inspection System Technical Specification INTRODUCTION This specification details the
CS244-Introduction to Embedded Systems and Ubiquitous Computing. Instructor: Eli Bozorgzadeh Computer Science Department UC Irvine Winter 2010
 CS244-Introduction to Embedded Systems and Ubiquitous Computing Instructor: Eli Bozorgzadeh Computer Science Department UC Irvine Winter 2010 CS244 Lecture 2 Embedded Applications Winter 2010- CS 244 2
CS244-Introduction to Embedded Systems and Ubiquitous Computing Instructor: Eli Bozorgzadeh Computer Science Department UC Irvine Winter 2010 CS244 Lecture 2 Embedded Applications Winter 2010- CS 244 2
What are Embedded Systems? Lecture 1 Introduction to Embedded Systems & Software
 What are Embedded Systems? 1 Lecture 1 Introduction to Embedded Systems & Software Roopa Rangaswami October 9, 2002 Embedded systems are computer systems that monitor, respond to, or control an external
What are Embedded Systems? 1 Lecture 1 Introduction to Embedded Systems & Software Roopa Rangaswami October 9, 2002 Embedded systems are computer systems that monitor, respond to, or control an external
INTEGRATED STEPPER DRIVES/MOTORS WITH ADVANCED FEATURES AND CONTROL OPTIONS. ADVANCED FEATURES Auto Set-Up:
 STEPPER DRIVES INTEGRATED STEPPER DRIVES/MOTORS WITH ADVANCED FEATURES AND CONTROL OPTIONS STM Series Starts at $ 417 Configuration Included! Current Output 0.5 to 5.0 A Configurator TM configuration Configurable
STEPPER DRIVES INTEGRATED STEPPER DRIVES/MOTORS WITH ADVANCED FEATURES AND CONTROL OPTIONS STM Series Starts at $ 417 Configuration Included! Current Output 0.5 to 5.0 A Configurator TM configuration Configurable
Ch 5 Industrial Control Systems
 Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
SOLIDWORKS SIMULATION
 SOLIDWORKS SIMULATION Innovation is about taking chances, not taking risks Scootchi by Curventa Designworks LTD What if? is the question that fuels innovation. SolidWorks Simulation software takes the
SOLIDWORKS SIMULATION Innovation is about taking chances, not taking risks Scootchi by Curventa Designworks LTD What if? is the question that fuels innovation. SolidWorks Simulation software takes the
Mohammad Jafar Navabi Medtronic Microelectronics Center, Tempe, Arizona, USA
 MICROCONTROLLERS Mohammad Jafar Navabi Medtronic Microelectronics Center, Tempe, Arizona, USA Keywords: Microprocessor, peripheral devices, CPU, I/O, analog to digital converter, digital to analog converter,
MICROCONTROLLERS Mohammad Jafar Navabi Medtronic Microelectronics Center, Tempe, Arizona, USA Keywords: Microprocessor, peripheral devices, CPU, I/O, analog to digital converter, digital to analog converter,
Application. Diagnosing the dashboard by the CANcheck software. Introduction
 Diagnosing the dashboard by the CANcheck software Introduction In recent years, vehicle electronics technology improved and advances day by day. A great of advanced electronic technology has been applied
Diagnosing the dashboard by the CANcheck software Introduction In recent years, vehicle electronics technology improved and advances day by day. A great of advanced electronic technology has been applied
Overview of Embedded Systems in Medical Applications
 of Embedded Systems in Medical Applications 1 Embedded Systems Simplistic definition Embedded System Shorthand for Embedded Processor System Embed microprocessor + fixed program in non-computer system
of Embedded Systems in Medical Applications 1 Embedded Systems Simplistic definition Embedded System Shorthand for Embedded Processor System Embed microprocessor + fixed program in non-computer system
Module 1. Introduction to Mechatronics. Fundamentals of Mechatronics (MH501)
") Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
LMS Virtual.Lab Noise and Vibration
 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration From component to system-level noise and vibration prediction 2 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration
LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration From component to system-level noise and vibration prediction 2 LMS Virtual.Lab Noise and Vibration LMS Virtual.Lab Noise and Vibration
Mechanical and Automation Engineering Programme (3-year Curriculum)
") Course List Mechanical and Automation Engineering Programme (3-year Curriculum) ENGG2014 Advanced Engineering Mathematics (Syllabus D) LINEAR ALGEBRA: vector spaces and subspaces; linear transformations
Course List Mechanical and Automation Engineering Programme (3-year Curriculum) ENGG2014 Advanced Engineering Mathematics (Syllabus D) LINEAR ALGEBRA: vector spaces and subspaces; linear transformations
FMS-200 Flexible integrated assembly systems
 FMS-200 Flexible integrated assembly systems Integrated training in industrial automation In the following TECHNOLOGIES... Hydraulics Electrical panel Pneumatics Vacuum Electric Motors SENSORS Identification
FMS-200 Flexible integrated assembly systems Integrated training in industrial automation In the following TECHNOLOGIES... Hydraulics Electrical panel Pneumatics Vacuum Electric Motors SENSORS Identification
VLT 2800 DRIVE SPECIFICATIONS
 VLT 2800 DRIVE SPECIFICATIONS Drive Input Power Input voltage 3 phase... 200 through 240, or 380 through 460; 3-phase all ratings 200 through 240, 1-phase through 2 HP Input voltage range for full output...
VLT 2800 DRIVE SPECIFICATIONS Drive Input Power Input voltage 3 phase... 200 through 240, or 380 through 460; 3-phase all ratings 200 through 240, 1-phase through 2 HP Input voltage range for full output...
Mechatronics Resources. for high school. Mechatronics Resources. Preparing your students for success. 21st century learning. Aligned to standards
 Preparing your students for success Mechatronics Resources 21st century learning Aligned to standards Knowledge and skills lessons Mechatronics Resources for high school Welcome We re LJ Create, Education
Preparing your students for success Mechatronics Resources 21st century learning Aligned to standards Knowledge and skills lessons Mechatronics Resources for high school Welcome We re LJ Create, Education
INSTRUMENT CLUSTER 2.0
 INSTRUMENT CLUSTER 2.0 Summary THE CONTEXT Electronic Content Timeline The Challenge MAGNETI MARELLI TARGET Digital Cluster Advantages The Requirements THE SOLUTION Project Definition System PROJECT DEVELOPEMENT
INSTRUMENT CLUSTER 2.0 Summary THE CONTEXT Electronic Content Timeline The Challenge MAGNETI MARELLI TARGET Digital Cluster Advantages The Requirements THE SOLUTION Project Definition System PROJECT DEVELOPEMENT
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM
 Chapter 3 HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM Dr. H.K. VERMA Distinguished Professor Department of Electrical and Electronics Engineering School of Engineering and Technology SHARDA
Chapter 3 HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM Dr. H.K. VERMA Distinguished Professor Department of Electrical and Electronics Engineering School of Engineering and Technology SHARDA
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
SWIFT OUTSTANDING PROPER
 SWIFT OUTSTANDING PROPER SUPPLIES & SERVICES OFFERED: WELDING & IRON WORKS DUCTING MOTORS GENERATORS LIFTERS ELECTRIC CONTROLS & EQUIPMENTS AUTOMATION MECHATRONICS PNEUMATICS SAFETY HVAC Company Profile
SWIFT OUTSTANDING PROPER SUPPLIES & SERVICES OFFERED: WELDING & IRON WORKS DUCTING MOTORS GENERATORS LIFTERS ELECTRIC CONTROLS & EQUIPMENTS AUTOMATION MECHATRONICS PNEUMATICS SAFETY HVAC Company Profile
Manipulation and Fluid Power. October 07, 2008
 2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
SECTION 1 INTRODUCTION. Walt Kester
 SECTION 1 INTRODUCTION Walt Kester This book deals with sensors and associated signal conditioning circuits. The topic is broad, but the focus of this book is to concentrate on circuit and signal processing
SECTION 1 INTRODUCTION Walt Kester This book deals with sensors and associated signal conditioning circuits. The topic is broad, but the focus of this book is to concentrate on circuit and signal processing
MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS
 Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
(Formerly University of Pune) INSTRUCTIONS FOR CANDIDATES
 INSTRUCTIONS FOR CANDIDATES") SAVITRIBAI PHULE PUNE UNIVERSITY (Formerly University of Pune) 254 /- 2016 Examination Circular No. 254 of 2016 Programme of B.E. (All Branches) In Sem Examinations, AUGUST, 2016 INSTRUCTIONS FOR CANDIDATES
SAVITRIBAI PHULE PUNE UNIVERSITY (Formerly University of Pune) 254 /- 2016 Examination Circular No. 254 of 2016 Programme of B.E. (All Branches) In Sem Examinations, AUGUST, 2016 INSTRUCTIONS FOR CANDIDATES
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
SECTION SOLID-STATE REDUCED VOLTAGE STARTERS
 SECTION 26 29 13.16 PART 1 - GENERAL 1.1 THE REQUIREMENT A. General: The CONTRACTOR shall provide solid-state reduced voltage motor starters, complete and operable, in accordance with the Contract Documents.
SECTION 26 29 13.16 PART 1 - GENERAL 1.1 THE REQUIREMENT A. General: The CONTRACTOR shall provide solid-state reduced voltage motor starters, complete and operable, in accordance with the Contract Documents.
Sumitomo (SHI) Demag Plastics Machinery GmbH
 Demag Plastics Machinery GmbH") Sumitomo (SHI) Demag Plastics Machinery GmbH info-dpde@dpg.com www.sumitomo-shi-demag.eu IntElect THE PRECISION MACHINE A brilliant idea stands at the beginning of every successful business deal. Committed
Sumitomo (SHI) Demag Plastics Machinery GmbH info-dpde@dpg.com www.sumitomo-shi-demag.eu IntElect THE PRECISION MACHINE A brilliant idea stands at the beginning of every successful business deal. Committed
Wireless Data Acquisition System (WiDAS)
") Wireless Data Acquisition System (WiDAS) Project Proposal By: Justin Peters Advisor: Mr. Steven Gutschlag December 1, 2009 Introduction Modern racing has become an extremely competitive sport. The theoretical
Wireless Data Acquisition System (WiDAS) Project Proposal By: Justin Peters Advisor: Mr. Steven Gutschlag December 1, 2009 Introduction Modern racing has become an extremely competitive sport. The theoretical
Automotive Testing: Optical 3D Metrology Improves Safety and Comfort
 Automotive Testing: Optical 3D Metrology Improves Safety and Comfort GOM Measuring System: ARAMIS, TRITOP, GOM Touch Probe Keywords: Automotive, Crash Testing, Static and Dynamic Deformation, Simulation
Automotive Testing: Optical 3D Metrology Improves Safety and Comfort GOM Measuring System: ARAMIS, TRITOP, GOM Touch Probe Keywords: Automotive, Crash Testing, Static and Dynamic Deformation, Simulation
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments
 A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SMART Position Sensor, 100 and 180 Arc Configurations
 SMART Position Sensor, 1 and 18 Arc Configurations DESCRIPTION The SMART Position Sensor is one of the most durable, adaptable, and lightweight position sensors available in the industry, enabling highly
SMART Position Sensor, 1 and 18 Arc Configurations DESCRIPTION The SMART Position Sensor is one of the most durable, adaptable, and lightweight position sensors available in the industry, enabling highly
Attitude Control for Small Satellites using Control Moment Gyros
 Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
High Performance Vibration Systems
 High Performance Vibration Systems With many years experience in the vibration and shock testing field, Servotest are able to supply a range of vibration testing equipment, developed to exceed other manufacturers
High Performance Vibration Systems With many years experience in the vibration and shock testing field, Servotest are able to supply a range of vibration testing equipment, developed to exceed other manufacturers
HIGH PERFORMANCE STEPPER DRIVES
 HIGH PERFORMANCE STEPPER DRIVES WITH AC POWER SUPPLY STAC6 Series Starts at 535 AC Power Supply Configuration Software and Programming Cables Included! Current Output.5 to 6. A 9 to 135 Vac Input Configurator
HIGH PERFORMANCE STEPPER DRIVES WITH AC POWER SUPPLY STAC6 Series Starts at 535 AC Power Supply Configuration Software and Programming Cables Included! Current Output.5 to 6. A 9 to 135 Vac Input Configurator
Operation of machine vision system
 ROBOT VISION Introduction The process of extracting, characterizing and interpreting information from images. Potential application in many industrial operation. Selection from a bin or conveyer, parts
ROBOT VISION Introduction The process of extracting, characterizing and interpreting information from images. Potential application in many industrial operation. Selection from a bin or conveyer, parts
2019 AUTOMOTIVE WEIGHT REDUCTION TECHNOLOGY FAIR
 www.autoexpo.co.kr www.autotecexpo.co.kr 2019 AUTOMOTIVE WEIGHT REDUCTION TECHNOLOGY FAIR [Concurrent Event] 2019 AUTOMOTIVE TECHNOLOGY EXPO Date: Venue : April 23(Tue) 25(Thu), 2019 Suwon Convention Center
www.autoexpo.co.kr www.autotecexpo.co.kr 2019 AUTOMOTIVE WEIGHT REDUCTION TECHNOLOGY FAIR [Concurrent Event] 2019 AUTOMOTIVE TECHNOLOGY EXPO Date: Venue : April 23(Tue) 25(Thu), 2019 Suwon Convention Center
BE/EE189 Design and Construction of Biodevices Lecture 5. BE/EE189 Design and Construction of Biodevices - Caltech
 BE/EE189 Design and Construction of Biodevices Lecture 5 LabVIEW Programming Data acquisition DAQ system Signals and signal conditioning Nyquist frequency NI ELVIS II NI-DAQmx and DAQ assistant LabVIEW
BE/EE189 Design and Construction of Biodevices Lecture 5 LabVIEW Programming Data acquisition DAQ system Signals and signal conditioning Nyquist frequency NI ELVIS II NI-DAQmx and DAQ assistant LabVIEW
IntElect THE PRECISION MACHINE. Sumitomo (SHI) Demag Plastics Machinery GmbH
 Demag Plastics Machinery GmbH") IntElect THE PRECISION MACHINE Sumitomo (SHI) Demag Plastics Machinery GmbH info-dpde@dpg.com www.sumitomo-shi-demag.eu All data and information in this prospectus have been complied with great care. However,
IntElect THE PRECISION MACHINE Sumitomo (SHI) Demag Plastics Machinery GmbH info-dpde@dpg.com www.sumitomo-shi-demag.eu All data and information in this prospectus have been complied with great care. However,
Automating Best Practices to Improve Design Quality
 Automating Best Practices to Improve Design Quality Adam Whitmill, Senior Application Engineer 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice
Automating Best Practices to Improve Design Quality Adam Whitmill, Senior Application Engineer 2015 The MathWorks, Inc. 1 Growing Complexity of Embedded Systems Emergency Braking Body Control Module Voice
Robert G. Landers. Manufacturing Automation and Control Laboratory (130 Toomey)
") Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
Lunar / Mars Rover Suspension
 Lunar / Mars Rover Suspension HW1: A Plan for a Simulation-Based Study ME 6105 Modeling and Simulation in Design January 30, 2007 Nathan Young Stephanie Thompson Robert Thiets 1. The Decision Situation
Lunar / Mars Rover Suspension HW1: A Plan for a Simulation-Based Study ME 6105 Modeling and Simulation in Design January 30, 2007 Nathan Young Stephanie Thompson Robert Thiets 1. The Decision Situation
Powered to Perform. Everyday Reliability. Exceptional Value. Expertise and Support
 A decentralized solution. Many drive applications utilize control panels with complex wiring taking up large amounts of space. These control panels are often mounted away from the application requiring
A decentralized solution. Many drive applications utilize control panels with complex wiring taking up large amounts of space. These control panels are often mounted away from the application requiring
Industrial Training Zone (ITZ) eseries Courses
 eseries Courses") Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
SICON Smart Sensors Role in Integrated System Health Management
 SICON 2005 Smart Sensors Role in Integrated System Health Management Jose M Perotti, Instrumentation Group Lead Command, Monitoring and Control Branch Spaceport Engineering &Technology Directorate, Kennedy
SICON 2005 Smart Sensors Role in Integrated System Health Management Jose M Perotti, Instrumentation Group Lead Command, Monitoring and Control Branch Spaceport Engineering &Technology Directorate, Kennedy
Optimization to Reduce Automobile Cabin Noise
 EngOpt 2008 - International Conference on Engineering Optimization Rio de Janeiro, Brazil, 01-05 June 2008. Optimization to Reduce Automobile Cabin Noise Harold Thomas, Dilip Mandal, and Narayanan Pagaldipti
EngOpt 2008 - International Conference on Engineering Optimization Rio de Janeiro, Brazil, 01-05 June 2008. Optimization to Reduce Automobile Cabin Noise Harold Thomas, Dilip Mandal, and Narayanan Pagaldipti
VEHICLE DYNAMICS AND DESIGN Spring Semester 2010
 EIDGENOSSISCHE TECHNISCHE HOCHSCHULE (ETH) SWISS FEDERAL INTITUTE OF TECHNOLOGY, ZURICH INSTITUTE FOR DYNAMC SYSTEMS AND CONTROL Department of Mechanical and Process Engineering VEHICLE DYNAMICS AND DESIGN
EIDGENOSSISCHE TECHNISCHE HOCHSCHULE (ETH) SWISS FEDERAL INTITUTE OF TECHNOLOGY, ZURICH INSTITUTE FOR DYNAMC SYSTEMS AND CONTROL Department of Mechanical and Process Engineering VEHICLE DYNAMICS AND DESIGN
Preliminary Datasheet MX Axis Stepper Drive with Breakout Board & I/O s. Preliminary V1.0
 Preliminary Datasheet MX4660 4-Axis Stepper Drive with Breakout Board & I/O s Preliminary V1.0 Features Power up to 4 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based
Preliminary Datasheet MX4660 4-Axis Stepper Drive with Breakout Board & I/O s Preliminary V1.0 Features Power up to 4 stepper motors of NEMA 17, 23, 24, or 34 Sophisticated stepper motor control based
Control of a quadrotor manipulating a beam (2 projects available)
") Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
NPTEL
 NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
SATHYABAMA INSTITUTE OF SCIENCE AND TECHNOLOGY (DEEMED TO BE UNIVERSITY)
") SCHOOL OF COMPUTING Exam Course Date Code 24.09.2018 SMT1203 Discrete Mathematics and Numerical Methods B.E. CSE 2017-2021 3 25.09.2018 SCS1201 Advanced Data Structures B.E. CSE 2017-2021 3 26.09.2018
SCHOOL OF COMPUTING Exam Course Date Code 24.09.2018 SMT1203 Discrete Mathematics and Numerical Methods B.E. CSE 2017-2021 3 25.09.2018 SCS1201 Advanced Data Structures B.E. CSE 2017-2021 3 26.09.2018