Advances in 3D data processing and 3D cameras
|
|
|
- Toby Chambers
- 6 years ago
- Views:
Transcription
1 Advances in 3D data processing and 3D cameras Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante
2 Contents Cameras and 3D images 3D data compression 3D registration 3D feature extraction Egomotion and reconstruction
3 Cameras and 3D images A sad story: Lot of work with stereo cameras. Stereo cameras are good enough for 3D, but they suffer from the lack of texture. Lot of work with 3D laser: long distance, but heavy and a bit slow and no color!. 2009: grant from Ministry for working with 3D data. 2010: search for a good 3D camera. SR4000 infrarred camera: November of 2010: Kinect is launched. We are still crying.


4 Different 3D sensors
5 Comparison Name Indoor/outdoor Range Resolution Pixel inf. 3D sweeping unit Both 20m-50m100m 360 x 360 Stereo camera Both 5m-10m- 640 x 480 Color/Gray SR4000 Indoor (Caution!) 5m-10m 176 x 144 Infrared Kinect Indoor 7m 640 x 480 Color No

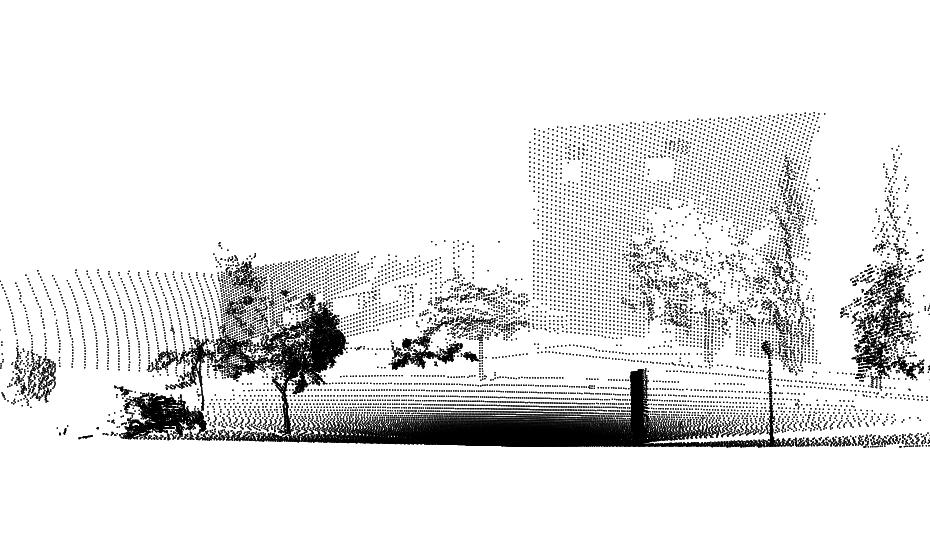
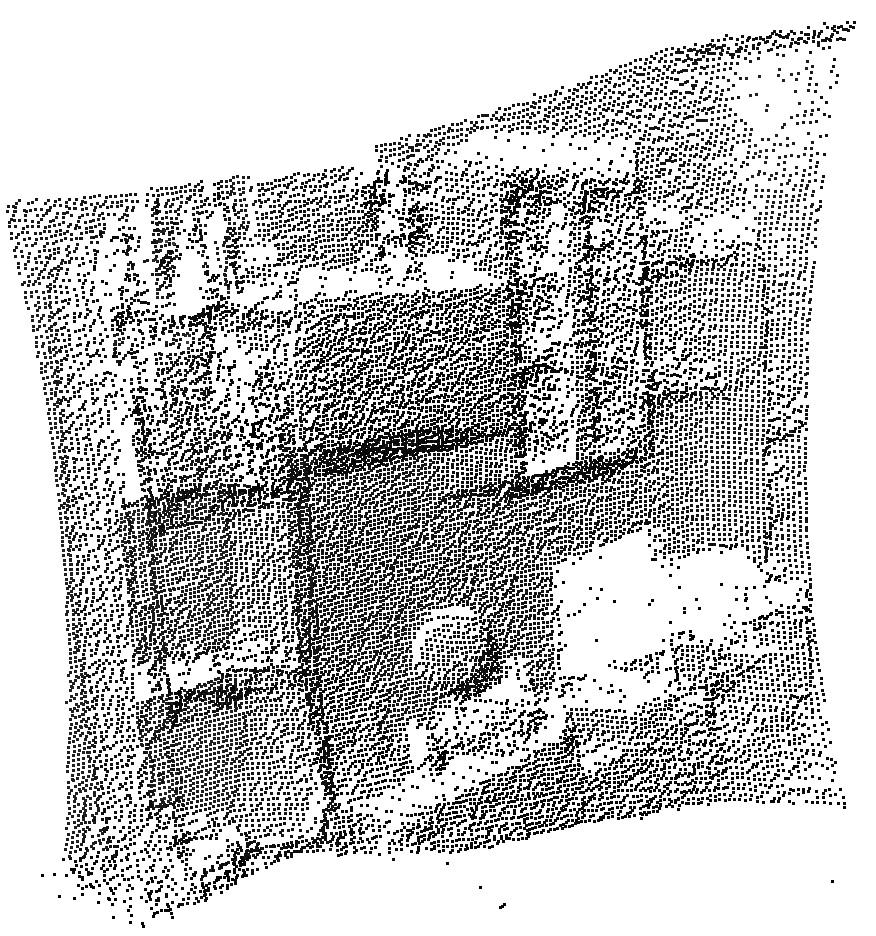

6 Data
7 3D data compression
8 3D data compression Kinect: resolution 640x480 ~ D points [X Y Z R G B] Kinect can provide 30fps HUGE AMOUNT OF DATA!!! Data compression is needed. There are several methods: Lossless/lossy methods (ussually using octrees) Progressive/non progressive methods
9 Proposed method Different from the ones in the literature Vicente Morell, Sergio Orts, Miguel Cazorla, Jose GarciaRodriguez Geometric 3D Point Cloud Compression. Pattern Recognition Letters (in review) Idea: if you know something about the environment, use it!!! Designed for man-made environments, mainly indoors It allows to define the level of compression
 Provides some set of 3D points with similar color (and in a plane) For each 3D point set: Calculate the concavehull Apply a Delaunay triangulation Store the plane")
10 Compression step Parameter: compression level Plane extraction using Ransac For each plane extracted: Color segmentation: Transform points from 3D to 2D (using the plane) Use your favorite segmentation method (we used Kmeans) Provides some set of 3D points with similar color (and in a plane) For each 3D point set: Calculate the concavehull Apply a Delaunay triangulation Store the plane and triangles (3 vertex, statistics) Store the rest of points
*npoints Randomly generate points inside t Add color information to")
11 Reconstruction Read the stored points For each plane P A is the area of P npoints is the points on P For each triangle t At is the area of t pointstogenerate=(at/a)*npoints Randomly generate points inside t Add color information to points

12 Results Compression obtained: 0.5 Distance error: Color error: 59.7
13 Experimentation

14 Experimentation With K=1 Compression level: 0.2, 0.5 and 0.8
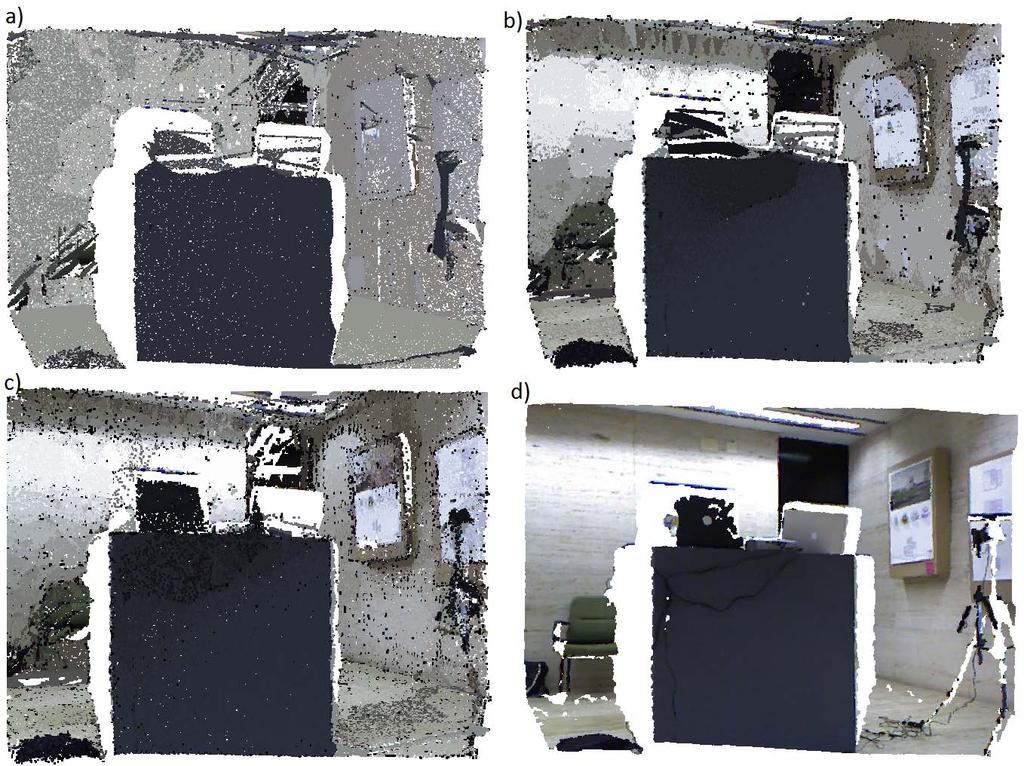
15 Experimentation
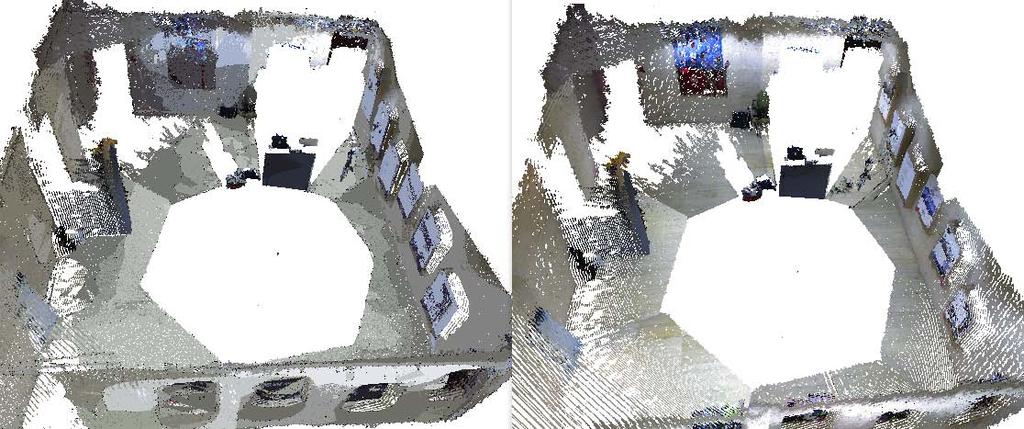
16 Results
17 3D feature extraction Extracting features directly from 3D data Application: egomotion and reconstruction
18 3D feature extraction Again, 3D data is huge. We need a method to extract/model data without losing information. We'll see two combined approaches: Method for reducing data, preserving their topology Method to extract features, like small planes Using the two approches combined will improve the whole process
19 3D registration Registration: process to find the transformation between two objects, mainly used in 3D matching With 3D point sets, you can follow two approaches Find the transformation using raw 3D data point Extract features and apply Ransac (or similar) Ransac is fast and eliminate outliers, but sometimes it does not provide best results Raw methods are slooooow and also suffers from outliers Some methods first apply Ransac then raw methods It is directly related with the egomotion of a robot
20 3D registration: Ransac Find features (2D, 3D or 2½D) Find correspondences between features at consecutive frames Some of those correspondences are incorrect
21 3D registration: ransac Ransac: Select a number of correspondences Find the transformation which best describe the selected correspondences Calculate the number of correspondences which are correct and their error Repeat a number of iterations and/or until an error is reached
22 3D registration: ICP Iterative Closest Point (ICP) 1982!! We have two point sets: model M and scene S An initial transformation T Apply T to M = Mt Find closest points between Mt and S (correspondences) Find newt from the correspondences Return to 1. Until a number of iterations or error are reached
23 Extracting planar patches from 3D data
24 Planar patches Our main goal is to process 3D data from any kind of 3D sensor Trying to reduce 3D points to chuncks of planar surfaces Using a seeding approach, several points are selected and checked if they belong to a plane
25 Planar patches extraction From one point, a certain neighbourhood is selected That neighbourhood will be different depending on The distance Z to points The error inside the plane Calculate the covarianze matrix M Robust estimator: Singular Value Decomposition of M SVD provides 3 singular values and 3 singular vectors If the minimum singular value is much less than the other two, the point set is a plane and the two singular vectors define the plane.


26 Planar patches extraction This process takes less than 1 second (it depends on the sensor)
27 Using planar patches to get registration Now we have normals instead of points!! We want to find the transformation: We apply an ICP-like method (find correspondences then find transformation) In order to find correspondences we have to define a distance planar patches
28 Distance between planar patches A normal is defined by a point and a vector. where da is an angular distance and ξ is a factor to convert euclidean distances to angular Now we are able to find the closest patch to one given. Applying an ICP algorithm was not satisfactory, so we decided to disconnect rotation and traslation
29 Registration using planar patches: rotation Finding the rotation to align both point sets. With the normals, find the cross covarianze where wi is the weight for a given correspondence. It is calculated using the angular distance This allows to reject outliers. Find the SVD decomposition of and from it, calculate R
30 Registration using planar patches: translation Apply R to the model Now, the correspondences between both set make a force system, with three main directions Each correspondence is changed by a vector Using again SVD we can obtain the main directions D1, D2, D3 ti are the translation components
31 Complete method
32 Planar patches registration in progress
33 Processing time
34 Comparison with ICP


35 Results
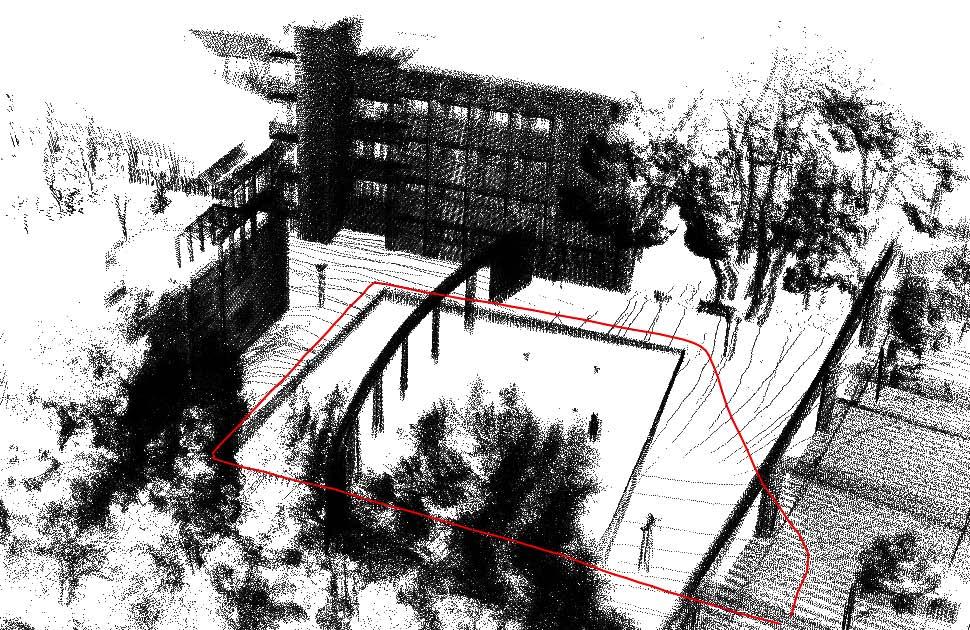
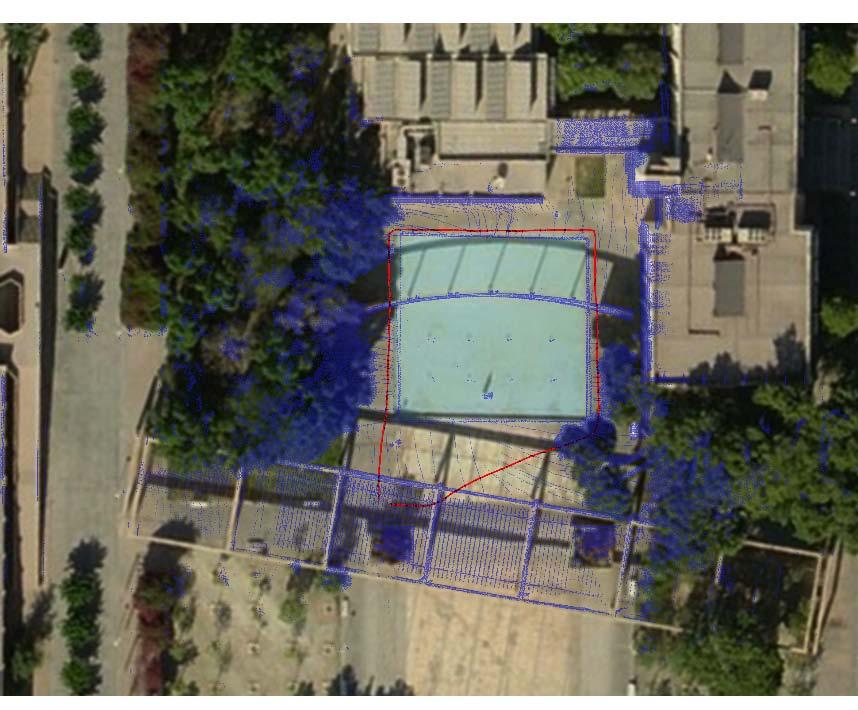
36 Results Data: Riegl VZ-400 and a Optris PI IR camera. 11 poses, separated 40 meters, more than 7 million points each Error obtained: 0.89ms, 1.27 degrees Processing time: 1.6s patch extraction, 54.8s registration
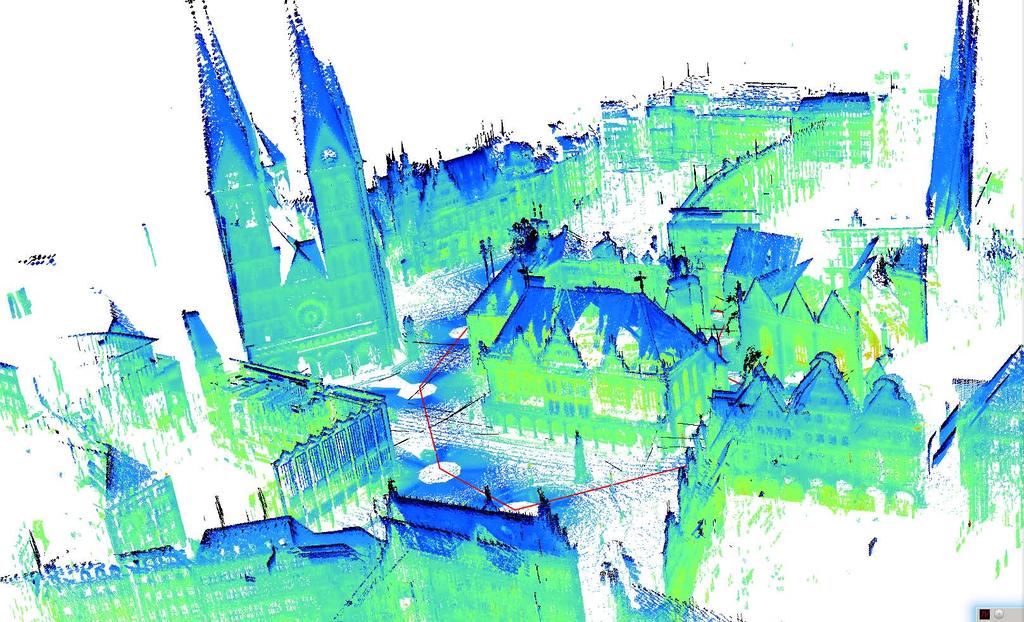
37 Results
38 Improving the results
39 Some errors With some data (mainly SR4000), our method was not good Remember: the greater the error the greater neighbourhood is
40 Improvement of the method using GNG The error can be smoothed using Bilateral filtering or similar But we decided to try a different approach: a Growing Neural Gas (GNG) GNG is a neural network forming a map (neurons and edges between them) which expands to map the complete input data and preserves the topology


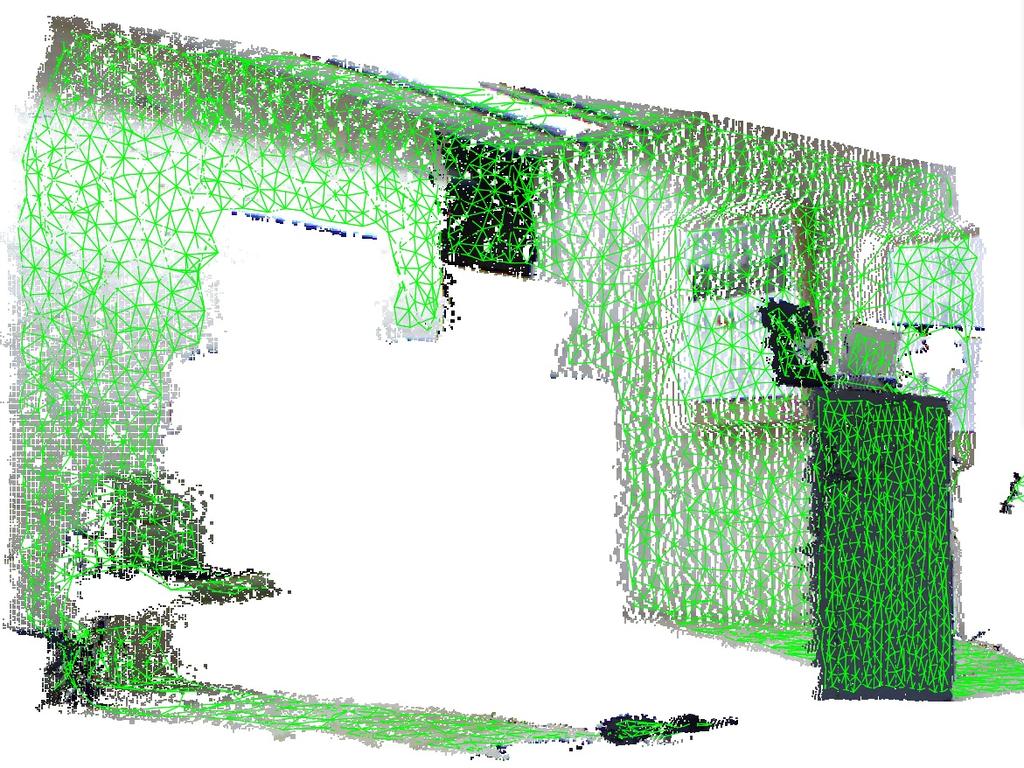
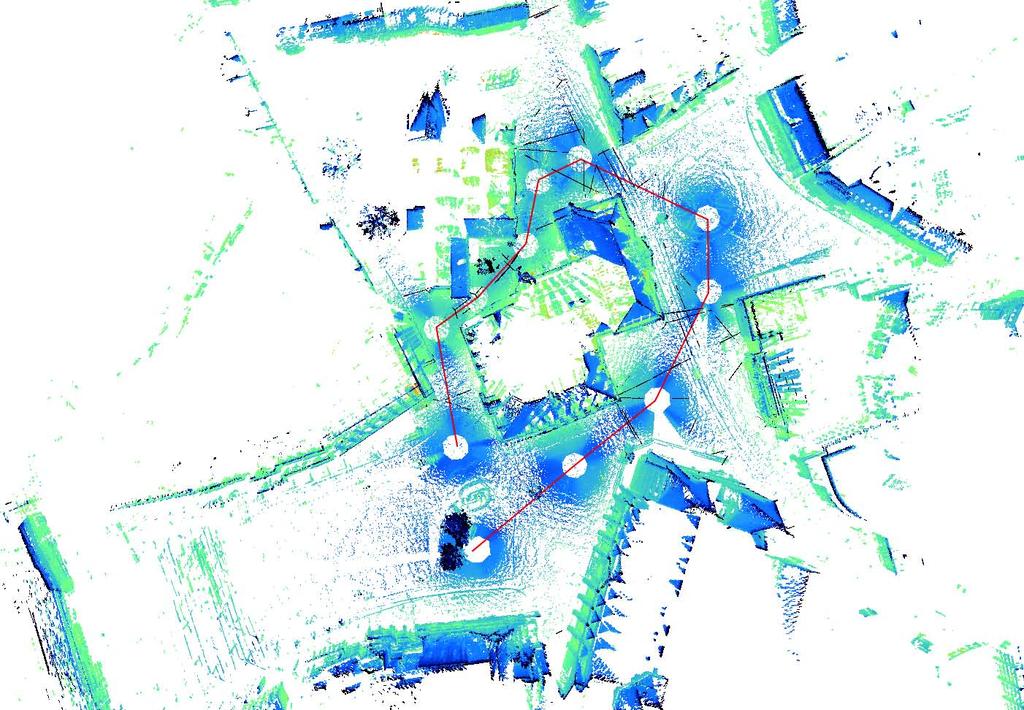
41 Results applying GNG to 3D data
42 Improvement when applying the planar patches algorithm
43 Results using GNG ICP Planar patches Planar patches plus GNG
44 Speeding up
45 Processing time FAIL!!!! Slooooooow GNG depends of the number of neurons used From seconds (5-20 s.) to minuts. Idea: apply GPU programming (CUDA) to speed up CUDA architecture reflects a SIMT model: Single Instruction, Multiple Threads Not all the method could be parallelize
46 Parallel algorithm
47 Results Trade-off
48 Conclusions Working with 3D data is amazing Always process the information in order to reduce data Sometimes, merging different technologies provides better results Do not buy SR4000!
49 Advances in 3D data processing and 3D cameras Thanks for your attention!!! Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
GPGPU Implementation of Growing Neural Gas: Application to 3D Scene Reconstruction
 GPGPU Implementation of Growing Neural Gas: Application to 3D Scene Reconstruction Sergio Orts, Jose Garcia-Rodriguez Department of Computing Technology at University of Alicante. Alicante (Spain) Diego
GPGPU Implementation of Growing Neural Gas: Application to 3D Scene Reconstruction Sergio Orts, Jose Garcia-Rodriguez Department of Computing Technology at University of Alicante. Alicante (Spain) Diego
A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data
 Autonomous Robots manuscript No. (will be inserted by the editor) A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data Diego Viejo Miguel Cazorla Received: date / Accepted: date
Autonomous Robots manuscript No. (will be inserted by the editor) A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data Diego Viejo Miguel Cazorla Received: date / Accepted: date
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
3D Model Reconstruction using Neural Gas Accelerated on GPU
 3D Model Reconstruction using Neural Gas Accelerated on GPU Sergio Orts-Escolano, Jose Garcia-Rodriguez, Antonio Jimeno-Morenilla, Jose Antonio Serra-Perez, Alberto Garcia Department of Computing Technology
3D Model Reconstruction using Neural Gas Accelerated on GPU Sergio Orts-Escolano, Jose Garcia-Rodriguez, Antonio Jimeno-Morenilla, Jose Antonio Serra-Perez, Alberto Garcia Department of Computing Technology
Combining Visual Features and Growing Neural Gas Networks for Robotic 3D SLAM
 Combining Visual Features and Growing Neural Gas Networks for Robotic 3D SLAM Diego Viejo, Jose Garcia-Rodriguez, Miguel Cazorla Instituto de Investigación en Informática. University of Alicante. Alicante
Combining Visual Features and Growing Neural Gas Networks for Robotic 3D SLAM Diego Viejo, Jose Garcia-Rodriguez, Miguel Cazorla Instituto de Investigación en Informática. University of Alicante. Alicante
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Real-time 3D semi-local surface patch extraction using GPGPU: Application to 3D object recognition
 Real-time 3D semi-local surface patch extraction using GPGPU: Application to 3D object recognition Sergio Orts-Escolano Vicente Morell Jose Garcia-Rodriguez Miguel Cazorla Robert B. Fisher Abstract Feature
Real-time 3D semi-local surface patch extraction using GPGPU: Application to 3D object recognition Sergio Orts-Escolano Vicente Morell Jose Garcia-Rodriguez Miguel Cazorla Robert B. Fisher Abstract Feature
HSM3D: Feature-Less Global 6DOF Scan-Matching in the Hough/Radon Domain
 HSM3D: Feature-Less Global 6DOF Scan-Matching in the Hough/Radon Domain Andrea Censi Stefano Carpin Caltech 3D data alignment how-to The data is 3D, but the sensor motion is 2D? (e.g., 3D scanner on a
HSM3D: Feature-Less Global 6DOF Scan-Matching in the Hough/Radon Domain Andrea Censi Stefano Carpin Caltech 3D data alignment how-to The data is 3D, but the sensor motion is 2D? (e.g., 3D scanner on a
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling
 Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
A Three-Dimensional Representation method for Noisy Point Clouds based on Growing Self-Organizing Maps accelerated on GPUs
 A Three-Dimensional Representation method for Noisy Point Clouds based on Growing Self-Organizing Maps accelerated on GPUs Author: Supervisors: Sergio Orts Escolano Dr. José García Rodríguez Dr. Miguel
A Three-Dimensional Representation method for Noisy Point Clouds based on Growing Self-Organizing Maps accelerated on GPUs Author: Supervisors: Sergio Orts Escolano Dr. José García Rodríguez Dr. Miguel
Real-time 3D semi-local surface patch extraction using GPGPU
 Real-time Image Processing manuscript No. (will be inserted by the editor) Sergio Orts-Escolano Vicente Morell Jose Garcia-Rodriguez Miguel Cazorla Robert B. Fisher Real-time 3D semi-local surface patch
Real-time Image Processing manuscript No. (will be inserted by the editor) Sergio Orts-Escolano Vicente Morell Jose Garcia-Rodriguez Miguel Cazorla Robert B. Fisher Real-time 3D semi-local surface patch
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS INTRODUCTION
 BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
Unconstrained 3D-Mesh Generation Applied to Map Building
 Unconstrained 3D-Mesh Generation Applied to Map Building Diego Viejo and Miguel Cazorla Robot Vision Group Departamento de Ciencia de la Computación e Inteligencia Artificial Universidad de Alicante E-03690,
Unconstrained 3D-Mesh Generation Applied to Map Building Diego Viejo and Miguel Cazorla Robot Vision Group Departamento de Ciencia de la Computación e Inteligencia Artificial Universidad de Alicante E-03690,
3D Hand Pose Estimation with Neural Networks
 3D Hand Pose Estimation with Neural Networks Jose Antonio Serra 1, Jose Garcia-Rodriguez 1, Sergios Orts 1, Juan Manuel Garcia- Chamizo 1, Anastassia Angelopoulou 2, Alexandra Psarou 2, Markos Mentzelopoulos
3D Hand Pose Estimation with Neural Networks Jose Antonio Serra 1, Jose Garcia-Rodriguez 1, Sergios Orts 1, Juan Manuel Garcia- Chamizo 1, Anastassia Angelopoulou 2, Alexandra Psarou 2, Markos Mentzelopoulos
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS
 A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
ABSTRACT. KinectFusion is a surface reconstruction method to allow a user to rapidly
 ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Pose Registration Model Improvement: Crease Detection. Diego Viejo Miguel Cazorla
 Pose Registration Model Improvement: Crease Detection Diego Viejo Miguel Cazorla Dpto. Ciencia de la Computación Dpto. Ciencia de la Computación e Inteligencia Artificial e Inteligencia Artificial Universidad
Pose Registration Model Improvement: Crease Detection Diego Viejo Miguel Cazorla Dpto. Ciencia de la Computación Dpto. Ciencia de la Computación e Inteligencia Artificial e Inteligencia Artificial Universidad
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES
 REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
From Structure-from-Motion Point Clouds to Fast Location Recognition
 From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Hand-eye calibration with a depth camera: 2D or 3D?
 Hand-eye calibration with a depth camera: 2D or 3D? Svenja Kahn 1, Dominik Haumann 2 and Volker Willert 2 1 Fraunhofer IGD, Darmstadt, Germany 2 Control theory and robotics lab, TU Darmstadt, Darmstadt,
Hand-eye calibration with a depth camera: 2D or 3D? Svenja Kahn 1, Dominik Haumann 2 and Volker Willert 2 1 Fraunhofer IGD, Darmstadt, Germany 2 Control theory and robotics lab, TU Darmstadt, Darmstadt,
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Modeling from Range Images
 1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
1 3D Modeling from Range Images A Comprehensive System for 3D Modeling from Range Images Acquired from a 3D ToF Sensor Dipl.-Inf. March 22th, 2007 Sensor and Motivation 2 3D sensor PMD 1k-S time-of-flight
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
WestminsterResearch
 WestminsterResearch http://www.westminster.ac.uk/research/westminsterresearch Real time motion estimation using a neural architecture implemented on GPUs Jose Garcia-Rodriguez 1 Sergio Orts-Escolano 1
WestminsterResearch http://www.westminster.ac.uk/research/westminsterresearch Real time motion estimation using a neural architecture implemented on GPUs Jose Garcia-Rodriguez 1 Sergio Orts-Escolano 1
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
Facial Expression Recognition using Principal Component Analysis with Singular Value Decomposition
 ISSN: 2321-7782 (Online) Volume 1, Issue 6, November 2013 International Journal of Advance Research in Computer Science and Management Studies Research Paper Available online at: www.ijarcsms.com Facial
ISSN: 2321-7782 (Online) Volume 1, Issue 6, November 2013 International Journal of Advance Research in Computer Science and Management Studies Research Paper Available online at: www.ijarcsms.com Facial
Using Augmented Measurements to Improve the Convergence of ICP. Jacopo Serafin and Giorgio Grisetti
 Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Real-Time Scene Reconstruction. Remington Gong Benjamin Harris Iuri Prilepov
 Real-Time Scene Reconstruction Remington Gong Benjamin Harris Iuri Prilepov June 10, 2010 Abstract This report discusses the implementation of a real-time system for scene reconstruction. Algorithms for
Real-Time Scene Reconstruction Remington Gong Benjamin Harris Iuri Prilepov June 10, 2010 Abstract This report discusses the implementation of a real-time system for scene reconstruction. Algorithms for
Grafica 3D per i beni culturali: Multiview stereo matching, making the model. Lezione 16: 5 maggio 2013
 Grafica 3D per i beni culturali: Multiview stereo matching, making the model Lezione 16: 5 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability
Grafica 3D per i beni culturali: Multiview stereo matching, making the model Lezione 16: 5 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Incremental Structured ICP Algorithm
 Incremental Structured ICP Algorithm Haokun Geng, Johnny Chien, Radu Nicolescu, and Reinhard Klette The.enpeda.. Project, Tamaki Campus The University of Auckland, New Zealand Abstract. Variants of the
Incremental Structured ICP Algorithm Haokun Geng, Johnny Chien, Radu Nicolescu, and Reinhard Klette The.enpeda.. Project, Tamaki Campus The University of Auckland, New Zealand Abstract. Variants of the
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 15, NO. 2, FEBRUARY
 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 15, NO. 2, FEBRUARY 2013 339 Real-Time, Full 3-D Reconstruction of Moving Foreground Objects From Multiple Consumer Depth Cameras Dimitrios S. Alexiadis, Dimitrios
IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 15, NO. 2, FEBRUARY 2013 339 Real-Time, Full 3-D Reconstruction of Moving Foreground Objects From Multiple Consumer Depth Cameras Dimitrios S. Alexiadis, Dimitrios
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
ICP and 3D-Reconstruction
 N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
Point Cloud Processing
 Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE
 LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE Roger Freitas,1 José Santos-Victor Mário Sarcinelli-Filho Teodiano Bastos-Filho Departamento de Engenharia Elétrica, Universidade Federal do Espírito Santo,
LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE Roger Freitas,1 José Santos-Victor Mário Sarcinelli-Filho Teodiano Bastos-Filho Departamento de Engenharia Elétrica, Universidade Federal do Espírito Santo,
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds
 1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
3D Visualization through Planar Pattern Based Augmented Reality
 NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images
 Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images Joydeep Biswas Robotics Institute Carnegie Mellon University Pittsburgh, PA 523, USA joydeepb@ri.cmu.edu Manuela Veloso
Fast Sampling Plane Filtering, Polygon Construction and Merging from Depth Images Joydeep Biswas Robotics Institute Carnegie Mellon University Pittsburgh, PA 523, USA joydeepb@ri.cmu.edu Manuela Veloso
Manhattan-World Assumption for As-built Modeling Industrial Plant
 Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
StereoScan: Dense 3D Reconstruction in Real-time
 STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Master Automática y Robótica. Técnicas Avanzadas de Vision: Visual Odometry. by Pascual Campoy Computer Vision Group
 Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
Master Automática y Robótica Técnicas Avanzadas de Vision: by Pascual Campoy Computer Vision Group www.vision4uav.eu Centro de Automá
Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013
 Lezione 14: 9 maggio 2013") Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively
Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Index C, D, E, F I, J
 Index A Ambient light, 12 B Blurring algorithm, 68 Brightness thresholding algorithm float testapp::blur, 70 kinect.update(), 69 void testapp::draw(), 70 void testapp::exit(), 70 void testapp::setup(),
Index A Ambient light, 12 B Blurring algorithm, 68 Brightness thresholding algorithm float testapp::blur, 70 kinect.update(), 69 void testapp::draw(), 70 void testapp::exit(), 70 void testapp::setup(),
Segmentation of point clouds
 Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission