Model Based Design and System Simulation with SimulationX and Tool Integration with optislang
|
|
|
- Chrystal Bates
- 6 years ago
- Views:
Transcription



1 Model Based Design and Sstem Simulation with SimulationX and Tool Integration with optislang Dr. Andreas Uhlig Uwe Grätz ITI GmbH


2 Introduction 2 Who we are Where we areout ITI Multi-faceted high-technolog Leader in virtual sstem engineering Headquarters located in Dresden downtown Frankfurt Berlin Dresden Munich



3 Introduction 3 Core Business Offering complete solutions for sstem modeling, simulation, analsis and testing development of simulation software engineering services product distribution product integration
4 Content 4 Content Model Based Design Equation Based Modeling Design of a Membrane Clinder an Eample for Sensitivit Analsis Interface to optislang Summar and Outlook


5 Model Based Design 5 Sstem Simulation / Model Based Design New challenges in sstems engineering Time, cost, Qualit, safet, Energ efficienc Dependenc of subsstems Earl assessment of designs Virtual prototping - of sstem! Use models and simulations Re-use models
6 Model Based Design 6 Requirements for Model Based Sstem Design Multidomain modeling Hierarchical modeling Replaceable models One model for multiple analses




7 Model Based Design Requirements Multidomain Modeling 7 Multidomain Modeling (SimulationX Libraries) Signal Blocks Mechanics Powertrain Electro- Mechanics Magnetics Pneumatics Hdraulics Thermo





8 Model Based Design Requirements Multidomain Modeling 8 Domain Specific Workspaces for the User Multi-bod Sstems Network Elements Statecharts Signal Blocks, Controls


9 Model Based Design Requirements Hierarchical Modeling 9 Level 1 Basic Model Simple rigid powertrain model including main components Analsis of feasibilit and general phsical relations Load Engine Flwheel Gearbo Gearbo Output Shaft Wheel Tire-Road Contact Car Driving Resistance 1D 2D 3D



10 Model Based Design Requirements Hierarchical Modeling 10 Level 2 Detailed Model Detailing of interesting elements Regard of elastic forces Simple engine model Merge elements in compounds Case studies Proof of concept simulations Engine Flwheel Gearbo Output Shaft Driving Resistance Gearbo Car 1D 2D 3D DoF: < 10 Parameter: Frequenc: < 100 Hz
11 Model Based Design Requirements Hierarchical Modeling 11 Level 3 Comple Model Multi-domain compounds Detailed engine & gearbo model StateCharts Flwheel Gearbo Output Shaft Driving Resistance Engine Car Turbocharger Gearbo 1D 2D 3D Clinders, Crank, PTOs DoF: > 10 Parameter: > 50 Frequenc: > 100 Hz


12 Model Based Design Requirements 12 Replaceable Models Easil switch to compatible tpe Efficient modeling
 Stationar")

13 Model Based Design Requirements 13 One model for multiple analses Transient in time domain Static equilibrium (DC analses) Stationar simulation (non-linear, frequenc domain) Linear sstem analsis of the entire sstem: Eigenfrequencies, Eigenmodes Energ analses Frequenc response Poles/Zeros
14 Equation Based Modeling 14 Equation Based Modeling Phsical laws are described in tet books in terms of formulas like F = m a Equation In programs this is implemented dependent on the goal of the simulation F := m a or a := F / m or m := F / a Assigments
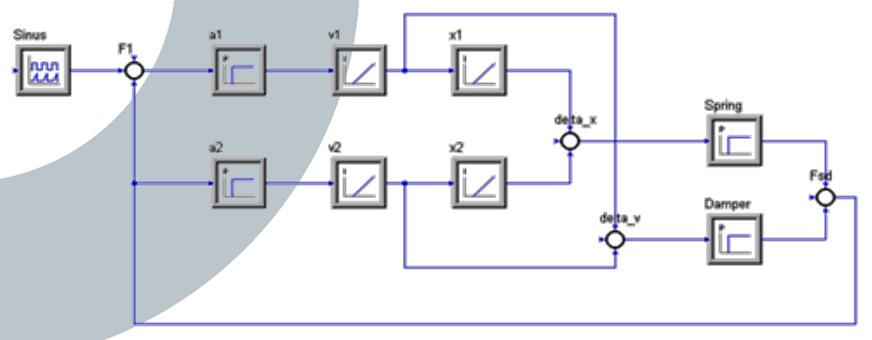
15 Equation Based Modeling 15 Modeling Concept Lumped (Network) Elements Definition of potential and flow quantities for each phsical domain Models consist of Elements and Connections Connections calculate potential quantities and define conservation equations (e.g. ΣF = 0 for mechanical nodes) F F F = 0 element F F,, &... F F element Elements define relations between flow- und potential variables within elements (e.g. F = k * in a mechanical spring model) Node element
16 Equation Based Modeling 16 Analogies in Phsical Domains SOURCES Potential Quantit Flow Quantit BASIC ELEMENT TYPES Capacitive Element Inductive Element Dissipative Element Electronics Voltage V Current I Capacitor I = C U & Inductor = 1 I U dt L Resistor U I = R Mechanics translational Velocit v Force F Mass F = m v & Spring F = c v dt Damper F = d v Mechanics rotational Angular Velocit ω Torque T Inertia T = J ω ω & Rotational Spring T = c ω dt Rotational Damper T = d ω ω Hdraulics Pressure p Volume Flow Q Volume Q = V p & Line (without loss) = 1 Q L pdt H Throttle p Q = R H Thermics Temperature T Heat Flow P Heat Capacit P = C T & - Heat Resistance R P = th T
17 Equation Based Modeling Modelica Language Allows Acausal and causal modeling Distinguishes Through and Across variables Multi-domain modeling Variables carr Attributes like units, documentation, min value, ma value and nominal value Modeling based on a modeling language Standard Modelica is a registered trademark of Modelica Association

18 Equation Based Modeling Who is Modelica? Standardized b Modelica Association Formed in September 1996 An independent, international, nonprofit modeling standards organization A clearing house for public domain Modelica libraries and documentation Organizer of Modelica design meetings and conferences SimulationX is based on Modelica Modelica is a registered trademark of Modelica Association
19 Equation Based Modeling 19 Mathematical Models represented b Modelica Differential Algebraic Equation (DAE) 0 = f (, &, p, d, r, t) DAE (semi-eplizit) & = f (,, p, d, r, t) 0 = f (,, p, d, r, t) continuous states algebraic variables p parameters d discrete variable R root functions t time
20 Equation Based Modeling 20 Start Equation sstem preparation Iterate discrete states Calc. consistent initial values Global smbolic analsis Event iteration Time step Time iteration Message No Success? Yes Prepare new Time step Message Yes Finished? No No Yes Event? STOP
21 Equation Based Modeling Smbolic Equation Handling No need for the user to decide which variables to solve for Reduces the number of different components in a librar Redundant states can be eliminated in models Parts of models can be solved smbolicall rather than numericall Smbolic initialization of model variables Increased performance of the simulation is gained at translation time Modelica is a registered trademark of Modelica Association

 Zahnimplantat Fiedler, M.")

22 Application Membrane Clinder 22 Pneumatic actuation of testing machines Stead state tests and oscillating loads with higher frequenc Membrane clinder: Low friction losses Low sticking forces Low tolerance required -> low cost Small stroke Application with membrane clinders Fatigue tests up to 50Hz and ±0,5 mm Testing machines (e.g. dental implants ) Zahnimplantat Fiedler, M.: Modellbildung und numerische Optimierung am Beispiel eines servopneumatischen Membranzlinderantriebs, TU Dresden, Dissertation 2010 Quelle: QZM e.v.



23 Application Membrane Clinder 23 Development Objectives Enlargement of amplitude of the membrane clinder wrt. the whole drive concept Modification of the clinder design especiall of the inner geometr Decreasing package dimensions, too Comple relation between stroke, pressure p, chamber volume V, force F F= f(p, A) A=f(p, )
24 Application Membrane Clinder 24 Workflow of optimization prozess Elasticit of membrane FEM Simulation of the membrane Membrane behavior (effective area, volume) Simulation modell of membrane clinder Geometr data Optimization of membrane clinder

25 Application Membrane Clinder 25 Simulation Model Definition of limits of considered design parameters Control of the clinder b a pneumatic valve Calculation of the influence of design parameters to the stead state membrane behavior
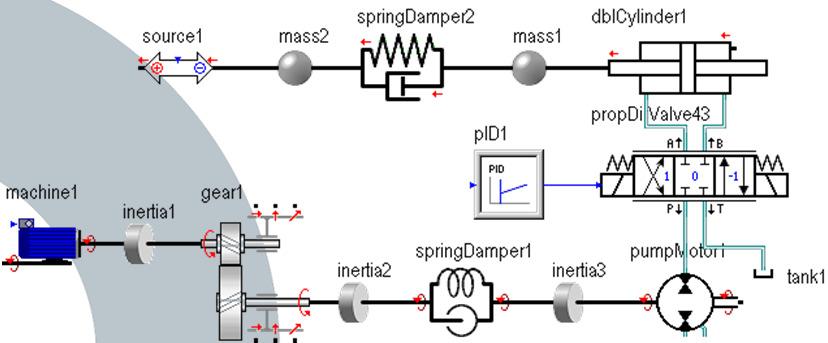
26 26 Simulation Model Membrane Clinder - Membrane behavoir dp_bar no friction and damping Implementation of maps for effective area and chamber F_Last volumes _k v_ab dp F_zl _k Membrane Clinder Mechanics pa_minus_pb 2 1 in1 ctr2 source1 3 ctr1 ctr1 ctr2 endstop1 Signal Processing ctr2 lever1 P-Controler (onl option, for valve control) _w 1 sum1 2 K ctr1 mass1 ctr1 ctr2 pb 3 s Application Membrane Clinder sensor1 ctr1 v singlepass1 maimum minimum 1 ampl 3 2 a p Ideal Valve Behavior no dnamics flow like VP l/min Ventil_soll_V Ventil_Signal pa p portp portb V_A spring1 ctr1 ctr2 ctr1 preset1 portp portb V_B Auslass_A dirvalve53 porta pinth in1 porta pinth p_0 in1 port port portr portp ports va Anschluss_A porta porta porta portb portbvb porta portb pinth portb porta Anschluss_B portb Auslass_B port pinth



27 27 Simulation Model for Optimization Membrane Clinder - Membrane behavoir dp_bar no friction and damping Implementation of maps for effective area and chamber F_Last volumes _k v_ab dp F_zl _k Membrane Clinder Mechanics pa_minus_pb 2 1 in1 ctr2 source1 3 ctr1 ctr1 ctr2 endstop1 Signal Processing ctr2 lever1 P-Controler (onl option, for valve control) _w 1 sum1 2 K ctr1 mass1 ctr1 ctr2 pb 3 s Application Membrane Clinder sensor1 ctr1 v singlepass1 maimum minimum 1 ampl 3 2 a p Ideal Valve Behavior no dnamics flow like VP l/min Ventil_soll_V Ventil_Signal pa p portp portb V_A spring1 ctr1 ctr2 ctr1 preset1 portp portb V_B Auslass_A dirvalve53 porta pinth in1 porta pinth p_0 in1 port port portr portp ports va Anschluss_A porta porta porta portb portbvb porta portb pinth portb porta Anschluss_B portb Auslass_B port pinth

28 Optimization with optislang 28 Optimization with optislang ang
29 Optimization with optislang 29 Optimization with optislang ang

30 Optimization with optislang 30 Sensitivit Analsis with optislang First Attempt: 4 Parameters included Sensitivit Analses eecuted CoP 1% results not usable Check model again Include more parameters


31 Optimization with optislang 31 Sensitivit Analsis with optislang 6 Parameters included Sensitivit Analses eecuted CoP 83% Continue with optimization.
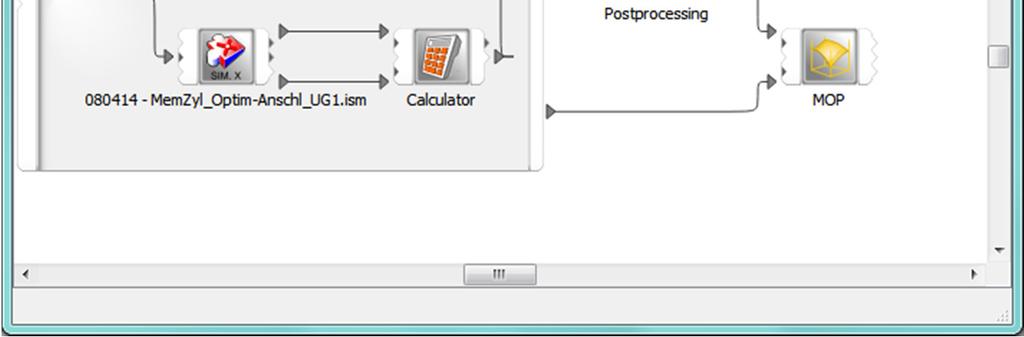
32 Interfaces to optislang 32 Benefit of Integration optislang 4 offers a range of direct integration nodes. In the case of SimulationX, the direct interface allows an eas and user-friendl parameter and response definition. In the optimization or calibration analsis, the specified properties are modified directl in the SimulationX model according to the defined ranges and the response values calculated for each design. Using the SimulationX API (COM based), the SimulationX model components, including their properties, can be directl accessed in the parametrization process of optislang.
33 API of SimulationX 33 (Component) Object Model Active Document Document SimObjects Parameters Parameter Objects & Collections SimObjects Results Results Application Simulation models Model components Parameters Result variables Element Tpes Result windows Selection Application Document Tpes Connections Connection Parameters Parameter Results Results Selection Entities Parameters Parameter Results Results SimObjects SimObjects Connections Connection Tpe Entit Result Window Result Window
34 Summar and Outlook 34 Summar Model based design is core of future sstems engineering Use noncausal models for different tasks (Modelica) SimulationX as powerful platform for sstems engineering A pneumatic application used as test case for sensitivit analsis Productiv optimization workflow with optislang 4 Net Steps Further increase efficienc Jump start guide (SimulationX + optislang)


 351.")
35 Supporting our vision ITI GmbH Headquarters Webergasse 1 Haus C Dresden German T + 49 (0)
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
From versatile analysis methods to interactive simulation with a motion platform based on SimulationX and FMI
 From versatile analysis methods to interactive simulation with a motion platform based on SimulationX and FMI SimulationX Tutorial, 8th Modelica Conference Dr. Ines Gubsch, IVMA, TUD Christian Schubert,
From versatile analysis methods to interactive simulation with a motion platform based on SimulationX and FMI SimulationX Tutorial, 8th Modelica Conference Dr. Ines Gubsch, IVMA, TUD Christian Schubert,
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Integrated modeling of jitter MTF due to random loads
 Integrated modeling of jitter MTF due to random loads Victor L. Genberg*, Gregor J. Michels Sigmadne, 803 West Ave, Rochester, NY 14611 *genberg@sigmadne.com (585)35-7460 Keith B. Dole** MIT Lincoln Laborator,
Integrated modeling of jitter MTF due to random loads Victor L. Genberg*, Gregor J. Michels Sigmadne, 803 West Ave, Rochester, NY 14611 *genberg@sigmadne.com (585)35-7460 Keith B. Dole** MIT Lincoln Laborator,
Proportional relief valves type RZMO-A* with Pmax 500 bar direct operated, without integral pressure transducer, ISO 4401 size 06
 able TF035-1/E Proportional relief valves tpe 110106 RZMO-A* with Pmax 500 bar direct operated, without integral pressure transducer, ISO 4401 size 06 9 10 Valve bod Proportional solenoid Spring Poppet
able TF035-1/E Proportional relief valves tpe 110106 RZMO-A* with Pmax 500 bar direct operated, without integral pressure transducer, ISO 4401 size 06 9 10 Valve bod Proportional solenoid Spring Poppet
Proportional directional valves type DPZO-T* two stage, with position transducer, ISO 4401 sizes 10, 16 and 25
 wwwatoscom Table F7-/E Proportional directional valves tpe DPZO-T* two stage, with position transducer, ISO 0 sizes 0, 6 and 5 DPZO-T* are two stage proportional valves with position transducer on the
wwwatoscom Table F7-/E Proportional directional valves tpe DPZO-T* two stage, with position transducer, ISO 0 sizes 0, 6 and 5 DPZO-T* are two stage proportional valves with position transducer on the
ESI ITI Academy. Courses and Contents
 ESI ITI Academy Courses and s SimulationX is a registered trademark of ESI ITI GmbH Dresden. ESI ITI GmbH, Dresden, Germany, 2017. All rights reserved. Doc. Vers. 07/2017 Preface ESI ITI Academy Dear Sir
ESI ITI Academy Courses and s SimulationX is a registered trademark of ESI ITI GmbH Dresden. ESI ITI GmbH, Dresden, Germany, 2017. All rights reserved. Doc. Vers. 07/2017 Preface ESI ITI Academy Dear Sir
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimulationX The Powerful Simulation Software Package for the Future
 ARLA Simulation in Cooperation with ITI (SimulationX - Page 1) SimulationX The Powerful Simulation Software Package for the Future Introduction SimulationX is a standard software for valuation of the interaction
ARLA Simulation in Cooperation with ITI (SimulationX - Page 1) SimulationX The Powerful Simulation Software Package for the Future Introduction SimulationX is a standard software for valuation of the interaction
Electric Actuators Type 5824 (without fail-safe action) Type 5825 (with fail-safe action)
 Type 5825 (with fail-safe action)") Electric Actuators Type 5824 (without fail-safe action) Type 5825 (with fail-safe action) Application Electric actuators designed for valves used in heating, ventilation and air-conditioning systems as
Electric Actuators Type 5824 (without fail-safe action) Type 5825 (with fail-safe action) Application Electric actuators designed for valves used in heating, ventilation and air-conditioning systems as
Proportional directional valves type DPZO-T* two stage, with position transducer, ISO 4401 sizes 10, 16 and 25
 wwwatoscom Table F7-5/E Proportional directional valves tpe DPZO-T* two stage, with position transducer, ISO 0 sizes 0, 6 and 5 DPZO-T* are two stage proportional valves with position transducer on the
wwwatoscom Table F7-5/E Proportional directional valves tpe DPZO-T* two stage, with position transducer, ISO 0 sizes 0, 6 and 5 DPZO-T* are two stage proportional valves with position transducer on the
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA
 Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Software-Entwicklungswerkzeuge
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge. Modelica Overview. Contents. 1. Modelica Introduction. 2. Modelica Users View. 3. Modelica Libraries
 Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Software-Entwicklungswerkzeuge Kapitel 41: Werkzeuge zur Simulation dynamischer Systeme Prof. Uwe Aßmann Softwaretechnologie TU Dresden Version 0.1, WS 09/10, 1/16/10 Modelica Overview by Martin Otter
Kinematics Support for Design and Simulation of Mechatronic Systems
 Kinematics Support for Design and Simulation of Mechatronic Sstems Rajarishi Sinha 1 Christiaan J.J. Paredis 12 and Pradeep K. Khosla 12 1 Institute for Complex Engineered Sstems Carnegie Mellon Universit
Kinematics Support for Design and Simulation of Mechatronic Sstems Rajarishi Sinha 1 Christiaan J.J. Paredis 12 and Pradeep K. Khosla 12 1 Institute for Complex Engineered Sstems Carnegie Mellon Universit
Study on the Dynamics Behaviour and MBS Modeling Method of a Subway Track Detecting Vehicle
 First International Conference on Rail Transportation Chengdu, China, Jul -1, 17 Stud on the Dnamics Behaviour and MBS Modeling Method of a Subwa Track Detecting Vehicle Zhuang QI 1, Wenlian ZHANG, Pengfei
First International Conference on Rail Transportation Chengdu, China, Jul -1, 17 Stud on the Dnamics Behaviour and MBS Modeling Method of a Subwa Track Detecting Vehicle Zhuang QI 1, Wenlian ZHANG, Pengfei
Estimation of Model Parameters Using Limited Data for the Simulation of Electric Power Systems
 Estimation of Model Parameters Using Limited Data for the Simulation of Electric Power Systems Robert Kerestes Emerson Process Management Presentation Roadmap Embedded Simulator Overview Mathematical Modeling
Estimation of Model Parameters Using Limited Data for the Simulation of Electric Power Systems Robert Kerestes Emerson Process Management Presentation Roadmap Embedded Simulator Overview Mathematical Modeling
Vehicle s Kinematics Measurement with IMU
 536441 Vehicle dnamics and control laborator Vehicle s Kinematics Measurement with IMU This laborator is design to introduce ou to understand and acquire the inertia properties for using in the vehicle
536441 Vehicle dnamics and control laborator Vehicle s Kinematics Measurement with IMU This laborator is design to introduce ou to understand and acquire the inertia properties for using in the vehicle
Real-Time Simulation of Modelica-based Models
 Real-Time Simulation of Modelica-based Models Torsten Blochwitz Thomas Beutlich ITI GmbH Webergasse 1, 01067 Dresden, Germany {blochwitz,beutlich}@iti.de Abstract This paper shows the various steps a simulation
Real-Time Simulation of Modelica-based Models Torsten Blochwitz Thomas Beutlich ITI GmbH Webergasse 1, 01067 Dresden, Germany {blochwitz,beutlich}@iti.de Abstract This paper shows the various steps a simulation
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Modeling with CMU Mini-FEA Program
 Modeling with CMU Mini-FEA Program Introduction Finite element analsis (FEA) allows ou analze the stresses and displacements in a bod when forces are applied. FEA determines the stresses and displacements
Modeling with CMU Mini-FEA Program Introduction Finite element analsis (FEA) allows ou analze the stresses and displacements in a bod when forces are applied. FEA determines the stresses and displacements
Global Optimization with MATLAB Products
 Global Optimization with MATLAB Products Account Manager 이장원차장 Application Engineer 엄준상 The MathWorks, Inc. Agenda Introduction to Global Optimization Peaks Surve of Solvers with Eamples 8 MultiStart 6
Global Optimization with MATLAB Products Account Manager 이장원차장 Application Engineer 엄준상 The MathWorks, Inc. Agenda Introduction to Global Optimization Peaks Surve of Solvers with Eamples 8 MultiStart 6
DYNAMICS MODELING OF A POWER TRANSMISSION MECHANISM WITH LINKAGE AND INERTIAL MASS
 FACULTY OF MCHANICS AND TCHNOLOGY SCINTIFIC BULLTIN AUTOMOTIV series, ear XIX, no. B DYNAMICS MODLING OF A POWR TRANSMISSION MCHANISM WITH LINKAG AND INRTIAL MASS Ion ION-GUTA Universit of Pitesti, Romania,
FACULTY OF MCHANICS AND TCHNOLOGY SCINTIFIC BULLTIN AUTOMOTIV series, ear XIX, no. B DYNAMICS MODLING OF A POWR TRANSMISSION MCHANISM WITH LINKAG AND INRTIAL MASS Ion ION-GUTA Universit of Pitesti, Romania,
AC : AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS
 AC 2009-575: AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS George Sutherland, Rochester Institute of Technology DR. GEORGE H. SUTHERLAND is a professor in the Manufacturing & Mechanical Engineering
AC 2009-575: AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS George Sutherland, Rochester Institute of Technology DR. GEORGE H. SUTHERLAND is a professor in the Manufacturing & Mechanical Engineering
Proportional throttle cartridges type LIQZO-L*, 2-way high dynamics, with two position transducers, ISO 7368 sizes from 16 to 100
 www.atos.com Table F00/E Proportional throttle cartridges tpe LIQZOL*, wa high dnamics, with two position transducers, ISO 768 sizes from 6 to 00 Poppet Sleeve Main stage position transducer Pilot valve
www.atos.com Table F00/E Proportional throttle cartridges tpe LIQZOL*, wa high dnamics, with two position transducers, ISO 768 sizes from 6 to 00 Poppet Sleeve Main stage position transducer Pilot valve
A New Concept on Automatic Parking of an Electric Vehicle
 A New Concept on Automatic Parking of an Electric Vehicle C. CAMUS P. COELHO J.C. QUADRADO Instituto Superior de Engenharia de Lisboa Rua Conselheiro Emídio Navarro PORTUGAL Abstract: - A solution to perform
A New Concept on Automatic Parking of an Electric Vehicle C. CAMUS P. COELHO J.C. QUADRADO Instituto Superior de Engenharia de Lisboa Rua Conselheiro Emídio Navarro PORTUGAL Abstract: - A solution to perform
Tutorials Tutorial 5 - TypeDesigner
 Tutorials Tutorial 5 - TypeDesigner Objective The software includes a helpful tool for creating, or extending element types - the TypeDesigner. In this tutorial we guide you step by step into the work
Tutorials Tutorial 5 - TypeDesigner Objective The software includes a helpful tool for creating, or extending element types - the TypeDesigner. In this tutorial we guide you step by step into the work
Tutorial 1 Getting Started
 by Tutorial 1 Getting Started Objective The following tutorial is a step-by-step introduction to the basics of SimulationX. You will first get an overview of the graphical user interface (GUI) with the
by Tutorial 1 Getting Started Objective The following tutorial is a step-by-step introduction to the basics of SimulationX. You will first get an overview of the graphical user interface (GUI) with the
Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017
![Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017](/thumbs/93/112845817.jpg "Modeling Technical Systems [ ] Mag MA MA Schweiger Gerald TU Graz Spring 2017") 1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
1 Modeling Technical Systems [716.055] Mag MA MA Schweiger Gerald TU Graz Spring 2017 Outline Scope of the course Introduction Modelica Basics Introduction to Dymola Scope of the course Introduction to
Proportional throttle cartridges type LIQZO-T*, 2-way with position transducer, ISO 7368 sizes from 16 to 50
 www.atos.com Table F0-7/E Proportional throttle cartridges tpe LIQZO-T*, -wa with position transducer, ISO 768 sizes from 6 to 50 Poppet Sleeve Main stage position transducer Pilot valve Integral electronics
www.atos.com Table F0-7/E Proportional throttle cartridges tpe LIQZO-T*, -wa with position transducer, ISO 768 sizes from 6 to 50 Poppet Sleeve Main stage position transducer Pilot valve Integral electronics
NUMERICAL PERFORMANCE OF COMPACT FOURTH ORDER FORMULATION OF THE NAVIER-STOKES EQUATIONS
 Published in : Communications in Numerical Methods in Engineering (008 Commun.Numer.Meth.Engng. 008; Vol : pp 003-019 NUMERICAL PERFORMANCE OF COMPACT FOURTH ORDER FORMULATION OF THE NAVIER-STOKES EQUATIONS
Published in : Communications in Numerical Methods in Engineering (008 Commun.Numer.Meth.Engng. 008; Vol : pp 003-019 NUMERICAL PERFORMANCE OF COMPACT FOURTH ORDER FORMULATION OF THE NAVIER-STOKES EQUATIONS
PRT simulation research
 THE ARCHIVES OF TRANSPORT VOL. XXVII-XXVIII NO 3-4 13 PRT simulation research Maciej Kozłowski Włodzimierz Choromański ** Received November 13 Abstract The paper presents analses results of PRT vehicle
THE ARCHIVES OF TRANSPORT VOL. XXVII-XXVIII NO 3-4 13 PRT simulation research Maciej Kozłowski Włodzimierz Choromański ** Received November 13 Abstract The paper presents analses results of PRT vehicle
Proportional throttle cartridges type LIQZO-L*, 2-way high dynamics, with two position transducers, ISO 7368 sizes from 16 to 100
 www.atos.com Table F00/E Proportional throttle cartridges tpe LIQZOL*, wa high dnamics, with two position transducers, ISO 768 sizes from 6 to Poppet Sleeve Main stage position transducer Pilot valve Integral
www.atos.com Table F00/E Proportional throttle cartridges tpe LIQZOL*, wa high dnamics, with two position transducers, ISO 768 sizes from 6 to Poppet Sleeve Main stage position transducer Pilot valve Integral
Thermal Deformation Analysis Using Modelica
 Thermal Deformation Analsis Using Modelica Eunkeong Kim 1 Tatsurou Yashiki 1 Fumiuki Suzuki 2 Yukinori Katagiri 1 Takua Yoshida 1 1 Hitachi, Ltd., Research & Development Group, Japan, {eunkeong.kim.mn,
Thermal Deformation Analsis Using Modelica Eunkeong Kim 1 Tatsurou Yashiki 1 Fumiuki Suzuki 2 Yukinori Katagiri 1 Takua Yoshida 1 1 Hitachi, Ltd., Research & Development Group, Japan, {eunkeong.kim.mn,
Display and Monitoing Units
 Display and Monitoing Units DISPLAY AND MONITOrING UNITS 13 The universal display unit HDA 5500 provides the means of visualizing and further processing the signals from our sensors. The unit is designed
Display and Monitoing Units DISPLAY AND MONITOrING UNITS 13 The universal display unit HDA 5500 provides the means of visualizing and further processing the signals from our sensors. The unit is designed
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Modeling and Simulation Exam
 Modeling and Simulation am Facult of Computers & Information Department: Computer Science Grade: Fourth Course code: CSC Total Mark: 75 Date: Time: hours Answer the following questions: - a Define the
Modeling and Simulation am Facult of Computers & Information Department: Computer Science Grade: Fourth Course code: CSC Total Mark: 75 Date: Time: hours Answer the following questions: - a Define the
NATIONAL UNIVERSITY OF SINGAPORE. (Semester I: 1999/2000) EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours
 EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours") NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
A. Hammer, H. Götsch, K. Käfer
 CREATING A HYDRAULIC SIMULATION PROGRAMM FOR HYDRO POWER PLANTS IN MATLAB/SIMULINK WITH SPECIAL INTEREST ON THE SURGE TANK BEHAVIOUR AND THE HYDRAULIC INSTABILITY OF PUMP TURBINES A. Hammer, H. Götsch,
CREATING A HYDRAULIC SIMULATION PROGRAMM FOR HYDRO POWER PLANTS IN MATLAB/SIMULINK WITH SPECIAL INTEREST ON THE SURGE TANK BEHAVIOUR AND THE HYDRAULIC INSTABILITY OF PUMP TURBINES A. Hammer, H. Götsch,
Series 430 Pneumatic Indicating Controllers. Equipment for Pressure Temperature Standardized signals
 eries 40 Pneumatic Indicating Controllers Equipment for Pressure emperature tandardized signals Associated Data heets 70 EN to 7045 EN Edition October 00 Information heet 700 EN eries 40 Pneumatic Indicating
eries 40 Pneumatic Indicating Controllers Equipment for Pressure emperature tandardized signals Associated Data heets 70 EN to 7045 EN Edition October 00 Information heet 700 EN eries 40 Pneumatic Indicating
Application of a Coordinate Transformation and Discretization Method for Computational Fluid Dynamics
 Application of a Coordinate Transformation and Discretization Method for Computational Fluid Dnamics 1 Douglas F. Hunsaker Utah State Universit An overview of the computational methods implemented in a
Application of a Coordinate Transformation and Discretization Method for Computational Fluid Dnamics 1 Douglas F. Hunsaker Utah State Universit An overview of the computational methods implemented in a
Wolfram SystemModeler. Getting Started
 Wolfram SystemModeler Getting Started i Contents 1 Introduction 1 2 Hello World 5 2.1 Hello World Model.................................... 5 2.1.1 Exercise...................................... 11 3 Multidomain
Wolfram SystemModeler Getting Started i Contents 1 Introduction 1 2 Hello World 5 2.1 Hello World Model.................................... 5 2.1.1 Exercise...................................... 11 3 Multidomain
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Subsystem- and full-vehicle-simulation of mobile machines using SimulationX
 Subsystem- and full-vehicle-simulation of mobile machines using SimulationX Dipl.-Ing. Manuel Bös Vorentwicklung Radlader /Advanced Development Wheelloader Liebherr-Werk-Bischofshofen GmbH, Bischofshofen,
Subsystem- and full-vehicle-simulation of mobile machines using SimulationX Dipl.-Ing. Manuel Bös Vorentwicklung Radlader /Advanced Development Wheelloader Liebherr-Werk-Bischofshofen GmbH, Bischofshofen,
THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004
 THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004 KENNETH S. KUNDERT Cadence Design Systems OLAF ZINKE Cadence Design Systems k4 Kluwer Academic Publishers Boston/Dordrecht/London Chapter 1 Introduction
THE DESIGNER'S GUIDE TO VERILOG-AMS First Edition June 2004 KENNETH S. KUNDERT Cadence Design Systems OLAF ZINKE Cadence Design Systems k4 Kluwer Academic Publishers Boston/Dordrecht/London Chapter 1 Introduction
Developing a Tracking Algorithm for Underwater ROV Using Fuzzy Logic Controller
 5 th Iranian Conference on Fuzz Sstems Sept. 7-9, 2004, Tehran Developing a Tracking Algorithm for Underwater Using Fuzz Logic Controller M.H. Saghafi 1, H. Kashani 2, N. Mozaani 3, G. R. Vossoughi 4 mh_saghafi@ahoo.com
5 th Iranian Conference on Fuzz Sstems Sept. 7-9, 2004, Tehran Developing a Tracking Algorithm for Underwater Using Fuzz Logic Controller M.H. Saghafi 1, H. Kashani 2, N. Mozaani 3, G. R. Vossoughi 4 mh_saghafi@ahoo.com
Chapter 9: Rational Equations and Functions
 Chapter 9: Rational Equations and Functions Chapter 9: Rational Equations and Functions Assignment Sheet Date Topic Assignment Completed 9.: Inverse and Joint Variation pg. 57 # - 4 odd, 54 9..: Graphing
Chapter 9: Rational Equations and Functions Chapter 9: Rational Equations and Functions Assignment Sheet Date Topic Assignment Completed 9.: Inverse and Joint Variation pg. 57 # - 4 odd, 54 9..: Graphing
Contents. How You May Use This Resource Guide
 Contents How You Ma Use This Resource Guide ii 0 Trigonometric Formulas, Identities, and Equations Worksheet 0.: Graphical Analsis of Trig Identities.............. Worksheet 0.: Verifing Trigonometric
Contents How You Ma Use This Resource Guide ii 0 Trigonometric Formulas, Identities, and Equations Worksheet 0.: Graphical Analsis of Trig Identities.............. Worksheet 0.: Verifing Trigonometric
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems
 Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Automating the Process for Modeling and Simulation of Mechatronics Systems
 Chapter Automating the Process for Modeling and Simulation of Mechatronics Systems Jose J. Granda Abstract Automating the modeling process of Mechatronics Systems can be achieved by the use of a two step
Chapter Automating the Process for Modeling and Simulation of Mechatronics Systems Jose J. Granda Abstract Automating the modeling process of Mechatronics Systems can be achieved by the use of a two step
Series 430 Type 3430 Pneumatic Indicating Controllers. Equipment for Pressure Temperature Standard Signals
 Series 430 pe 3430 Pneumatic Indicating Controllers Equipment for Pressure emperature Standard Signals Associated Data Sheets 703 EN to 7045 EN Edition October 00 Information Sheet 7030 EN Series 430 Pneumatic
Series 430 pe 3430 Pneumatic Indicating Controllers Equipment for Pressure emperature Standard Signals Associated Data Sheets 703 EN to 7045 EN Edition October 00 Information Sheet 7030 EN Series 430 Pneumatic
New paradigm for MEMS+IC Co-development
 New paradigm for MEMS+IC Co-development MEMS 진보된스마트세상을만듭니다. Worldwide First MEMS+IC Co-development Solution New paradigm for MEMS+IC Co-development A New Paradigm for MEMS+IC Development MEMS design
New paradigm for MEMS+IC Co-development MEMS 진보된스마트세상을만듭니다. Worldwide First MEMS+IC Co-development Solution New paradigm for MEMS+IC Co-development A New Paradigm for MEMS+IC Development MEMS design
XML-Based Hierarchical Description of 3D Systems and SIP
 XML-Based Hierarchical Description of 3D Sstems and SIP Susann Wolf, And Heinig, Uwe Knöchel Fraunhofer Institute for Integrated Circuits, Design Automation Division (IIS/EAS), Dresden, German (Susann.Wolf
XML-Based Hierarchical Description of 3D Sstems and SIP Susann Wolf, And Heinig, Uwe Knöchel Fraunhofer Institute for Integrated Circuits, Design Automation Division (IIS/EAS), Dresden, German (Susann.Wolf
Probabilistic Optimization of Polarized Magnetic Actuators by Coupling of Network and Finite Element Models
 Faculty of Electrical Engineering and Information Technology Institute of Electromechanical and Electronic Design Probabilistic Optimization of Polarized Magnetic Actuators by Coupling of Network and Finite
Faculty of Electrical Engineering and Information Technology Institute of Electromechanical and Electronic Design Probabilistic Optimization of Polarized Magnetic Actuators by Coupling of Network and Finite
KINEMATICS STUDY AND WORKING SIMULATION OF THE SELF- ERECTION MECHANISM OF A SELF-ERECTING TOWER CRANE, USING NUMERICAL AND ANALYTICAL METHODS
 The rd International Conference on Computational Mechanics and Virtual Engineering COMEC 9 9 OCTOBER 9, Brasov, Romania KINEMATICS STUY AN WORKING SIMULATION OF THE SELF- ERECTION MECHANISM OF A SELF-ERECTING
The rd International Conference on Computational Mechanics and Virtual Engineering COMEC 9 9 OCTOBER 9, Brasov, Romania KINEMATICS STUY AN WORKING SIMULATION OF THE SELF- ERECTION MECHANISM OF A SELF-ERECTING
Electrically tunable large aperture lens EL TC-VIS-20D
 Datasheet: EL-16-4-TC-VIS-2D Electrically tunable large aperture lens EL-16-4-TC-VIS-2D By applying an electric current to this shape changing polymer lens, its optical power is controlled within milliseconds
Datasheet: EL-16-4-TC-VIS-2D Electrically tunable large aperture lens EL-16-4-TC-VIS-2D By applying an electric current to this shape changing polymer lens, its optical power is controlled within milliseconds
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Data Sheet T 6493 EN. TROVIS 6400 Automation System TROVIS 6493 Compact Controller. For panel mounting (front frame 48 x 96 mm/1.89 x 3.
 Data Sheet T 6493 EN TROVIS 6400 Automation System TROVIS 6493 Compact Controller For panel mounting (front frame 48 x 96 mm/1.89 x 3.78 inch) Application Digital controller to automate industrial and
Data Sheet T 6493 EN TROVIS 6400 Automation System TROVIS 6493 Compact Controller For panel mounting (front frame 48 x 96 mm/1.89 x 3.78 inch) Application Digital controller to automate industrial and
Electrically tunable large aperture lens EL TC
 Datasheet: EL-16-4-TC Electrically tunable large aperture lens EL-16-4-TC By applying an electric current to this shape changing polymer lens, its optical power is controlled within milliseconds over a
Datasheet: EL-16-4-TC Electrically tunable large aperture lens EL-16-4-TC By applying an electric current to this shape changing polymer lens, its optical power is controlled within milliseconds over a
Simulation-based design of measurement systems
 Simulation-based design of measurement systems Peter Schneider, Andreas Wilde Fraunhofer IIS Design Automation Division Dresden (EAS) Zeunerstr. 38, 01069 Dresden Edgar Schäfer Lippok & Wolf GmbH Hutt-Keller-Str.
Simulation-based design of measurement systems Peter Schneider, Andreas Wilde Fraunhofer IIS Design Automation Division Dresden (EAS) Zeunerstr. 38, 01069 Dresden Edgar Schäfer Lippok & Wolf GmbH Hutt-Keller-Str.
Inductive angle sensor with analog output Ri360P1-DSU35TC-ELi-Exi
 ATEX category II 2 G, Ex Zone 1 ATEX category II 2 D, Ex Zone 21 Rectangular, housing DSU35 Plastic, PP-GF30-VO Detection of angular range 0 to 360 P1-Ri-QR14 positioning element included in delivery Measuring
ATEX category II 2 G, Ex Zone 1 ATEX category II 2 D, Ex Zone 21 Rectangular, housing DSU35 Plastic, PP-GF30-VO Detection of angular range 0 to 360 P1-Ri-QR14 positioning element included in delivery Measuring
Table of Contents 1. Overview Installation...6
 (2003-01-31) Table of Contents 1. Overview...1 1.1. Introduction... 1 1.2. Product Description... 1 1.2.1. Mechanical Actuator Assembly with M2CP Electrical Enclosure... 1 1.2.2. Variable Frequency Controller
(2003-01-31) Table of Contents 1. Overview...1 1.1. Introduction... 1 1.2. Product Description... 1 1.2.1. Mechanical Actuator Assembly with M2CP Electrical Enclosure... 1 1.2.2. Variable Frequency Controller
2.3. Horizontal and Vertical Translations of Functions. Investigate
 .3 Horizontal and Vertical Translations of Functions When a video game developer is designing a game, she might have several objects displaed on the computer screen that move from one place to another
.3 Horizontal and Vertical Translations of Functions When a video game developer is designing a game, she might have several objects displaed on the computer screen that move from one place to another
The Infinity TCX 865 programmable Infinet terminal controller is a unique, low-cost VAV box
 Infinity TCX 865,866 VAV Controller with Built-in Actuator The Infinity TCX 865 programmable Infinet terminal controller is a unique, low-cost VAV box controller that comes equipped with a built-in damper
Infinity TCX 865,866 VAV Controller with Built-in Actuator The Infinity TCX 865 programmable Infinet terminal controller is a unique, low-cost VAV box controller that comes equipped with a built-in damper
Fast running actuators for air dampers
 4 608 OpenAir TM Fast running actuators for air dampers Fast runner rotary version, GAP19 Electronic actuator for 2-position, 3-position, or modulating control, nominal torque 6 Nm, at 2 s running time,
4 608 OpenAir TM Fast running actuators for air dampers Fast runner rotary version, GAP19 Electronic actuator for 2-position, 3-position, or modulating control, nominal torque 6 Nm, at 2 s running time,
Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example.
 Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example. Pascal Bayrasy 1, Michael Burger 2, Carsten Dehning 1, Ilja Kalmykov 1 und Michael Speckert 2 1 Fraunhofer-Institute
Applications for MBS-FEM-coupling with MpCCI using automotive simulation as example. Pascal Bayrasy 1, Michael Burger 2, Carsten Dehning 1, Ilja Kalmykov 1 und Michael Speckert 2 1 Fraunhofer-Institute
Analog electric proportional joysticks JEP
 Analog electric proportional joysticks JEP 2.01.09 Index: Description: Page 3 Technical features: Page 4 Metering curve: Page 5 Overall dimensions: Pages 6 9 Control handles: Page 10 Rubber boot: Page
Analog electric proportional joysticks JEP 2.01.09 Index: Description: Page 3 Technical features: Page 4 Metering curve: Page 5 Overall dimensions: Pages 6 9 Control handles: Page 10 Rubber boot: Page
Finite Element Analysis on Sound Wave Propagation into Human Head
 Finite Element Analsis on Sound Wave Propagation into Human Head The overall goal of this project is to develop an acoustic propagation model using wellunderstood and documented computational techniques
Finite Element Analsis on Sound Wave Propagation into Human Head The overall goal of this project is to develop an acoustic propagation model using wellunderstood and documented computational techniques
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
3.9 Differentials. Tangent Line Approximations. Exploration. Using a Tangent Line Approximation
 3.9 Differentials 3 3.9 Differentials Understand the concept of a tangent line approimation. Compare the value of the differential, d, with the actual change in,. Estimate a propagated error using a differential.
3.9 Differentials 3 3.9 Differentials Understand the concept of a tangent line approimation. Compare the value of the differential, d, with the actual change in,. Estimate a propagated error using a differential.
DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML
 DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML 11.20 DMA 40 P 230/02 3 L DMA 30 P 230/03 0 L DMA 30 Q 230/ 0 L DMA 30 A 230/ 0 L Printed in Germany Edition 02. Nr. 229
DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML 11.20 DMA 40 P 230/02 3 L DMA 30 P 230/03 0 L DMA 30 Q 230/ 0 L DMA 30 A 230/ 0 L Printed in Germany Edition 02. Nr. 229
ARI-PREMIO Plus 2G Electric thrust actuator with fail-safe function
 ARI-PREMIO Plus 2G Electric thrust actuator with fail-safe function Electric thrust actuator with fail-safe function ARI-PREMIO Plus 2G Electric thrust actuator with fail-safe function ARI-PREMIO Plus
ARI-PREMIO Plus 2G Electric thrust actuator with fail-safe function Electric thrust actuator with fail-safe function ARI-PREMIO Plus 2G Electric thrust actuator with fail-safe function ARI-PREMIO Plus
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Alternative approach for teaching multibody dynamics
 Rochester Institute of Technology RIT Scholar Works Articles 2009 Alternative approach for teaching multibody dynamics George Sutherland Follow this and additional works at: http://scholarworks.rit.edu/article
Rochester Institute of Technology RIT Scholar Works Articles 2009 Alternative approach for teaching multibody dynamics George Sutherland Follow this and additional works at: http://scholarworks.rit.edu/article
DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML
 DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML 11.20 DMA 40 P 230/02 3 L DMA 30 P 230/03 0 L DMA 30 Q 230/10 0 L DMA 30 A 230/10 0 L Printed in Germany Edition 08.14 Nr.
DMA Actuator drives for - Motorised Butterfly Valve DMK - Motorised throttle DML 11.20 DMA 40 P 230/02 3 L DMA 30 P 230/03 0 L DMA 30 Q 230/10 0 L DMA 30 A 230/10 0 L Printed in Germany Edition 08.14 Nr.
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
DUAL-RANGE DIGITAL TORQUEMETERS
 Best Performance Under Real-World Conditions 1:1 and 1:5 NIST Traceable * Ranges 1,000% and 200% Overload Capacities Three Simultaneous ±5/±10V Analog Outputs With 150% Overrange Speed & Power ±5/±10V
Best Performance Under Real-World Conditions 1:1 and 1:5 NIST Traceable * Ranges 1,000% and 200% Overload Capacities Three Simultaneous ±5/±10V Analog Outputs With 150% Overrange Speed & Power ±5/±10V
SM9000. Made in Germany
 Made in Germany Product characteristics Magnetic-inductive flow meter Connector Process connection: G2 flat seal connection to pipe by means of an adapter Function programmable Totaliser function Empty
Made in Germany Product characteristics Magnetic-inductive flow meter Connector Process connection: G2 flat seal connection to pipe by means of an adapter Function programmable Totaliser function Empty
19 Assessment of the Soil-Structure- Interaction based on Dynamic Measurements
 9 Assessment of the Soil-Structure- Interaction based on Dnamic Measurements Chapter 9- Authors: Fritz Kopf Adrian Bekő David Schäfer Johannes Pistrol Michael Pietsch Ludwig Rossbacher Motivation Man monitoring
9 Assessment of the Soil-Structure- Interaction based on Dnamic Measurements Chapter 9- Authors: Fritz Kopf Adrian Bekő David Schäfer Johannes Pistrol Michael Pietsch Ludwig Rossbacher Motivation Man monitoring
Two Dimensional Viewing
 Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
ILBPB24DO32. Inline Block IO Module for PROFIBUS With 32 Digital Outputs. AUTOMATIONWORX Data Sheet 6889_en_04. Description
 Inline Block IO Module for PROFIBUS With 32 Digital Outputs AUTOMATIONWORX Data Sheet 6889_en_04 Description PHOENIX CONTACT - 03/2007 & & ' ) The ILB PB 24 DO32 module is designed for use within a PROFIBUS
Inline Block IO Module for PROFIBUS With 32 Digital Outputs AUTOMATIONWORX Data Sheet 6889_en_04 Description PHOENIX CONTACT - 03/2007 & & ' ) The ILB PB 24 DO32 module is designed for use within a PROFIBUS
Pearson Education Limited Edinburgh Gate Harlow Essex CM20 2JE England and Associated Companies throughout the world
 Pearson Education Limited Edinburgh Gate Harlow Esse CM0 JE England and Associated Companies throughout the world Visit us on the World Wide Web at: www.pearsoned.co.uk Pearson Education Limited 04 All
Pearson Education Limited Edinburgh Gate Harlow Esse CM0 JE England and Associated Companies throughout the world Visit us on the World Wide Web at: www.pearsoned.co.uk Pearson Education Limited 04 All
Strain gauge Measuring Amplifier GSV-1A8. Instruction manual GSV-1A8, GSV-1A8USB, GSV-1A16USB
 Strain gauge Measuring Amplifier GSV-A8 Instruction manual GSV-A8, GSV-A8USB, GSV-A6USB GSV-A8USB SubD5 (front side) GSV-A8USB M2 (front side) GSV-A6USB (rear side) GSV-A8USB K6D (front side) Version:
Strain gauge Measuring Amplifier GSV-A8 Instruction manual GSV-A8, GSV-A8USB, GSV-A6USB GSV-A8USB SubD5 (front side) GSV-A8USB M2 (front side) GSV-A6USB (rear side) GSV-A8USB K6D (front side) Version:
Product Information. ECN 1023 EQN 1035 Rotary Encoders with EnDat 2.2 for Safety-Related Applications
 Product Information ECN 1023 EQN 1035 Rotary Encoders with EnDat 2.2 for Safety-Related Applications January 2009 ECN 1023/EQN 1035 Series Rotary encoders for safety-related applications With integral
Product Information ECN 1023 EQN 1035 Rotary Encoders with EnDat 2.2 for Safety-Related Applications January 2009 ECN 1023/EQN 1035 Series Rotary encoders for safety-related applications With integral
A rigid body free to move in a reference frame will, in the general case, have complex motion, which is simultaneously a combination of rotation and
 050389 - Analtical Elements of Mechanisms Introduction. Degrees of Freedom he number of degrees of freedom (DOF) of a sstem is equal to the number of independent parameters (measurements) that are needed
050389 - Analtical Elements of Mechanisms Introduction. Degrees of Freedom he number of degrees of freedom (DOF) of a sstem is equal to the number of independent parameters (measurements) that are needed
STRAND G: Relations, Functions and Graphs
 UNIT G Using Graphs to Solve Equations: Tet STRAND G: Relations, Functions and Graphs G Using Graphs to Solve Equations Tet Contents * * Section G. Solution of Simultaneous Equations b Graphs G. Graphs
UNIT G Using Graphs to Solve Equations: Tet STRAND G: Relations, Functions and Graphs G Using Graphs to Solve Equations Tet Contents * * Section G. Solution of Simultaneous Equations b Graphs G. Graphs
Introduction to Shape and Pointer Analysis
 Introduction to Shape and Pointer Analsis CS 502 Lecture 11 10/30/08 Some slides adapted from Nielson, Nielson, Hankin Principles of Program Analsis Analsis of the Heap Thus far, we have focussed on control
Introduction to Shape and Pointer Analsis CS 502 Lecture 11 10/30/08 Some slides adapted from Nielson, Nielson, Hankin Principles of Program Analsis Analsis of the Heap Thus far, we have focussed on control
Co-Simulation von Flownex und ANSYS CFX am Beispiel einer Verdrängermaschine
 Co-Simulation von Flownex und ANSYS CFX am Beispiel einer Verdrängermaschine Benoit Bosc-Bierne, Dr. Andreas Spille-Kohoff, Farai Hetze CFX Berlin Software GmbH, Berlin Contents Positive displacement compressors
Co-Simulation von Flownex und ANSYS CFX am Beispiel einer Verdrängermaschine Benoit Bosc-Bierne, Dr. Andreas Spille-Kohoff, Farai Hetze CFX Berlin Software GmbH, Berlin Contents Positive displacement compressors
Series 3793 TROVIS SAFE 3793 Electropneumatic Positioner with HART communication
 Series 3793 TROVIS SAFE 3793 Electropneumatic Positioner with HART communication Application Single-acting or double-acting positioner for attachment to pneumatic on/off valves in safety-instrumented systems.
Series 3793 TROVIS SAFE 3793 Electropneumatic Positioner with HART communication Application Single-acting or double-acting positioner for attachment to pneumatic on/off valves in safety-instrumented systems.
Strain gauge Measuring Amplifier GSV-1A8. Instruction manual GSV-1A8, GSV-1A8USB, GSV-1A16USB
 Strain gauge Measuring Amplifier GSV-1A8 Instruction manual GSV-1A8, GSV-1A8USB, GSV-1A16USB GSV-1A8USB SubD1 (front side) GSV-1A8USB M12 (front side) GSV-1A16USB (rear side) GSV-1A8USB K6D (front side)
Strain gauge Measuring Amplifier GSV-1A8 Instruction manual GSV-1A8, GSV-1A8USB, GSV-1A16USB GSV-1A8USB SubD1 (front side) GSV-1A8USB M12 (front side) GSV-1A16USB (rear side) GSV-1A8USB K6D (front side)
Electrical Rotary Drive
 Stellantriebe Electrical Rotary Drive www.arisactuators.com Synchronous motor technology (AC) or direct current motor () The permanent magnets built into the synchronous motor ensure a high holding torque
Stellantriebe Electrical Rotary Drive www.arisactuators.com Synchronous motor technology (AC) or direct current motor () The permanent magnets built into the synchronous motor ensure a high holding torque
Digital Positioner 8049
 Compact digital positioner for pneumatic control valves. Positioner can be integrated into valve actuator (no external moving parts for stroke feedback) Wide range of strokes - 8 mm No steady-state air
Compact digital positioner for pneumatic control valves. Positioner can be integrated into valve actuator (no external moving parts for stroke feedback) Wide range of strokes - 8 mm No steady-state air
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών
 Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Inductive Angle Sensor With Analog Output RI360P1-DSU35TC-ELI-EXI
 ATEX category II 2 G, Ex Zone 1 ATEX category II 2 D, Ex Zone 21 Rectangular, housing DSU35 Plastic, PP-GF30-VO Detecting angular positions of 0 to 360 P1-Ri-DSU35 positioning element included in delivery
ATEX category II 2 G, Ex Zone 1 ATEX category II 2 D, Ex Zone 21 Rectangular, housing DSU35 Plastic, PP-GF30-VO Detecting angular positions of 0 to 360 P1-Ri-DSU35 positioning element included in delivery
n Measuring range 0... ± 0,02 Nm to 0... ± 1000 Nm n Low linearity deviation of ± 0.05 % F.S. n Intelligent operating state indicator
 Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Optional: USB interface Dual
Precision Torque Sensor Non-contact transmission for rotating applications Optional measurement of angle and speed Model 8661 Code: Delivery: Warranty: 2-3 weeks 24 months Optional: USB interface Dual
N0524/N1024, N POS/N POS
 N0/N0, N00-POS/N00-POS NON-SPRING RETURN DIRECT-COUPLED DAMPER ACTUATORS FOR FLOATING / -POSITION CONTROL PRODUCT DATA SPECIFICATIONS Supply voltage N0/N0 Vac/dc -%/+0%, 0/60 Hz N00-POS/N00-POS 0 Vac -%/+0%,
N0/N0, N00-POS/N00-POS NON-SPRING RETURN DIRECT-COUPLED DAMPER ACTUATORS FOR FLOATING / -POSITION CONTROL PRODUCT DATA SPECIFICATIONS Supply voltage N0/N0 Vac/dc -%/+0%, 0/60 Hz N00-POS/N00-POS 0 Vac -%/+0%,