Multiview Reconstruction
|
|
|
- David Potter
- 5 years ago
- Views:
Transcription
1 Multiview Reconstruction

2 Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard

3 Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3

4 Trinocular Stereo Straightforward approach to eliminate bad correspondences Pick 2 views, find correspondences For each matching pair, reconstruct 3D point Project point into 3 rd image If can t find correspondence near predicted location, reject
5 Trinocular Stereo Trifocal geometry: relations between points in three camera views Trifocal tensor: analogue of essential matrix 3x3x3 trilinear tensor (3D cube of numbers) Given lines in 2 views, predict lines in the 3 rd
6 Multibaseline Stereo Slightly different algorithm for n cameras: Pick one reference view For each candidate depth Compute sum of squared differences to all other views, assuming correct disparity for view Resolves ambiguities: only correct depths will constructively interfere
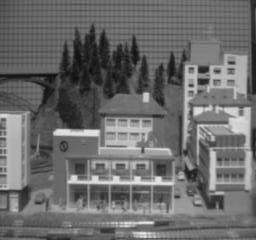
7 Multibaseline Stereo
8 Multibaseline Stereo [Okutami & Kanade]

9 Multibaseline Stereo Reconstruction
10 Multibaseline Stereo

11 Problems with Multibaseline Stereo Have to pick a reference view Occlusion With many cameras / large baseline, occlusion becomes likely Contributes incorrect values to error function
 Typically use discretized volume (voxel grid) For each voxel, compute occupied / free (for some")
12 Volumetric Multiview Approaches Goal: find a model consistent with images Model-centric (vs. image-centric) Typically use discretized volume (voxel grid) For each voxel, compute occupied / free (for some algorithms, also color, etc.)
13 Photo Consistency Result: not necessarily correct scene Many scenes produce the same images True scene Reconstructed scene All scenes Photo-consistent scenes

14 Silhouette Carving Find silhouettes in all images Exact version: Back-project all silhouettes, find intersection Binary Images
15 Silhouette Carving Find silhouettes in all images Exact version: Back-project all silhouettes, find intersection


16 Silhouette Carving Limit of silhouette carving is visual hull or line hull Complement of lines that don t intersect object In general not the same as object Can t recover pits in object Not the same as convex hull
17 Silhouette Carving Discrete version: Loop over all voxels in some volume If projection into images lies inside all silhouettes, mark as occupied Else mark as free
18 Silhouette Carving

19 Voxel Coloring Seitz and Dyer, 1997 In addition to free / occupied, store color at each voxel Explicitly accounts for occlusion
20 Voxel Coloring Basic idea: sweep through a voxel grid Project each voxel into each image in which it is visible If colors in images agree, mark voxel with color Else, mark voxel as empty Agreement of colors based on comparing standard deviation of colors to threshold
21 Voxel Coloring and Occlusion Problem: which voxels are visible? Solution, part 1: constrain camera views When a voxel is considered, necessary occlusion information must be available Sweep occluders before occludees Constrain camera positions to allow this sweep


22 Voxel Coloring Sweep Order Layers Scene Traversal Seitz


23 Voxel Coloring Camera Positions Inward-looking Cameras above scene Outward-looking Cameras inside scene Seitz
24 Panoramic Depth Ordering Cameras oriented in many different directions Planar depth ordering does not apply Seitz

25 Panoramic Depth Ordering Layers radiate outwards from cameras Seitz
26 Panoramic Depth Ordering Layers radiate outwards from cameras Seitz


27 Panoramic Depth Ordering Layers radiate outwards from cameras Seitz
28 Voxel Coloring and Occlusion Solution, part 2: per-image mask of which pixels have been used Each pixel only used once Mask filled in as sweep progresses





29 Image Acquisition Selected Dinosaur Images Calibrated Turntable 360 rotation (21 images) Selected Flower Images Seitz



30 Voxel Coloring Results Dinosaur Reconstruction 72 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI Flower Reconstruction 70 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI Seitz
31 Voxel Coloring Results With texture: good results Without texture: regions tend to bulge out Voxels colored at earliest time at which projection into images is consistent Model good for re-rendering: image will look correct for viewpoints near the original ones

32 Limitations of Voxel Coloring p q A view-independent depth order may not exist Need more powerful general-case algorithms Unconstrained camera positions Unconstrained scene geometry/topology
33 Space Carving Image 1... Image N Initialize to a volume V containing the true scene Choose a voxel on the current surface Project to visible input images Carve if not photo-consistent Repeat until convergence Kutulakos & Seitz
34 Multi-Pass Plane Sweep Faster alternative: Sweep plane in each of 6 principal directions Consider cameras on only one side of plane Repeat until convergence
35 Multi-Pass Plane Sweep True Scene Reconstruction
36 Multi-Pass Plane Sweep
37 Multi-Pass Plane Sweep
38 Multi-Pass Plane Sweep
39 Multi-Pass Plane Sweep
40 Multi-Pass Plane Sweep



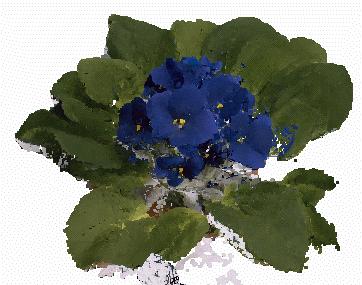
41 Space Carving Results: African Violet Input Image (1 of 45) Reconstruction Reconstruction Reconstruction


 Views")
42 Space Carving Results: Hand Input Image (1 of 100) Views of Reconstruction
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Calibrated Image Acquisition for Multi-view 3D Reconstruction
 Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
A Probabilistic Framework for Surface Reconstruction from Multiple Images
 A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
 COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS INTRODUCTION
 PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING
 VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
Modeling, Combining, and Rendering Dynamic Real-World Events From Image Sequences
 Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Photorealistic Scene Reconstruction by Voxel Coloring
 In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Ray casting for incremental voxel colouring
 Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
CS 260 Computer Graphics
 Craig M. Wittenbrink Lecture 6: Image Based Rendering Techniques cont.: Seitz and Dyer (Shade et al., Wittenbrink et al., finish from last time) CS 260 Computer Graphics &6Ã:LQWHUÃ:LWWHQEULQNÃOHFWÃ Overview
Craig M. Wittenbrink Lecture 6: Image Based Rendering Techniques cont.: Seitz and Dyer (Shade et al., Wittenbrink et al., finish from last time) CS 260 Computer Graphics &6Ã:LQWHUÃ:LWWHQEULQNÃOHFWÃ Overview
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving
 Boston University Computer Science Tech. Report BUCS-TR-23-25, December 5, 23 Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving John Isidoro and Stan
Boston University Computer Science Tech. Report BUCS-TR-23-25, December 5, 23 Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving John Isidoro and Stan
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Shape and Motion Carving in 6D
 To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
A Probabilistic Framework for Space Carving
 A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Solid Modeling. Thomas Funkhouser Princeton University C0S 426, Fall Represent solid interiors of objects
 Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Co
 Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Comp. Engineering Client and Media Systems Lab Georgia
Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Comp. Engineering Client and Media Systems Lab Georgia
Plenoptic Image Editing
 Plenoptic Image Editing Steven M. Seitz Computer Sciences Department University of Wisconsin Madison Madison, WI53706 Kiriakos N. Kutulakos Department of Computer Science University of Rochester Rochester,
Plenoptic Image Editing Steven M. Seitz Computer Sciences Department University of Wisconsin Madison Madison, WI53706 Kiriakos N. Kutulakos Department of Computer Science University of Rochester Rochester,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
3D Reconstruction of Dynamic Textures with Crowd Sourced Data. Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm
 3D Reconstruction of Dynamic Textures with Crowd Sourced Data Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm 1 Background Large scale scene reconstruction Internet imagery 3D point cloud Dense geometry
3D Reconstruction of Dynamic Textures with Crowd Sourced Data Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm 1 Background Large scale scene reconstruction Internet imagery 3D point cloud Dense geometry
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007
 Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static
Shape from Silhouettes II
 Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
3D Object Model Acquisition from Silhouettes
 4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
What Do N Photographs Tell Us About 3D Shape?
 What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Augmented and Mixed Reality
 Augmented and Mixed Reality Uma Mudenagudi Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi Outline Introduction to Augmented Reality(AR) and Mixed Reality(MR) A Typical
Augmented and Mixed Reality Uma Mudenagudi Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi Outline Introduction to Augmented Reality(AR) and Mixed Reality(MR) A Typical
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University of Rochester Rochester, NY USA
 To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
Virtual Worlds using Computer Vision
 Virtual Worlds using Computer Vision P. J. Narayanan Centre for Artificial Intelligence & Robotics Raj Bhavan Circle, High Grounds Bangalore, INDIA 560 001. E-mail: pjn@cair.res.in Takeo Kanade Robotics
Virtual Worlds using Computer Vision P. J. Narayanan Centre for Artificial Intelligence & Robotics Raj Bhavan Circle, High Grounds Bangalore, INDIA 560 001. E-mail: pjn@cair.res.in Takeo Kanade Robotics
Omni-directional Multi-baseline Stereo without Similarity Measures
 Omni-directional Multi-baseline Stereo without Similarity Measures Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science and Technology 8916-5 Takayama, Ikoma,
Omni-directional Multi-baseline Stereo without Similarity Measures Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science and Technology 8916-5 Takayama, Ikoma,
Toward Interactive Scene Walkthroughs from Images
 Toward Interactive Scene Walkthroughs from Images Steven M. Seitz Microsoft Research One Microsoft Way Redmond, WA 98052 sseitz@microsoft.com Abstract Interactive walkthrough applications require rendering
Toward Interactive Scene Walkthroughs from Images Steven M. Seitz Microsoft Research One Microsoft Way Redmond, WA 98052 sseitz@microsoft.com Abstract Interactive walkthrough applications require rendering
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp
 Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Appearance-Based Virtual View Generation From Multicamera Videos Captured in the 3-D Room
 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 5, NO. 3, SEPTEMBER 2003 303 Appearance-Based Virtual View Generation From Multicamera Videos Captured in the 3-D Room Hideo Saito, Member, IEEE, Shigeyuki Baba, and
IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 5, NO. 3, SEPTEMBER 2003 303 Appearance-Based Virtual View Generation From Multicamera Videos Captured in the 3-D Room Hideo Saito, Member, IEEE, Shigeyuki Baba, and
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Project Ideas. Guido Gerig CS 6643, Computer Vision Spring 2016
 Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Silhouette-based Multiple-View Camera Calibration
 Silhouette-based Multiple-View Camera Calibration Prashant Ramanathan, Eckehard Steinbach, and Bernd Girod Information Systems Laboratory, Electrical Engineering Department, Stanford University Stanford,
Silhouette-based Multiple-View Camera Calibration Prashant Ramanathan, Eckehard Steinbach, and Bernd Girod Information Systems Laboratory, Electrical Engineering Department, Stanford University Stanford,
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
View Synthesis using Convex and Visual Hulls. Abstract
 View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Reconstructing Reflective and Transparent Surfaces from Epipolar Plane Images
 Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a
Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a