Multiple Model Estimation : The EM Algorithm & Applications
|
|
|
- Lynn Poole
- 5 years ago
- Views:
Transcription


1 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com
2 Recapitulation Problem of motion estimation Parametric models of motion Direct methods for image motion estimation Camera models & parametric motion Image & video mosaicing as an application Quasi-parametric model-based motion & structure estimation : Depth and Pose Image-based Rendering Hi-res stereo sequence synthesis as an IBMR application
3 Plan Motivate Image-based Modeling & Rendering (IBMR) Change in viewpoint, IMAX app Parameterize motion & structure for video Euclidean case Direct Estimation Plane+Parallax Formulation Direct Estimation IMAX app. Tweening app. Model-to-video pose estimation Video Flashlights
4 Real-World Apps of IBR The Matrix What Dreams May Come Titanic
5 Application : Dynamic New View Rendering The Matrix
6 Flow-based New View Rendering Original 8 frames Tweened 71 frames

7 Enhanced Visualization
8 3D Model-based Direct Camera Pose Estimation and Video Visualization [Hsu et al. 00]
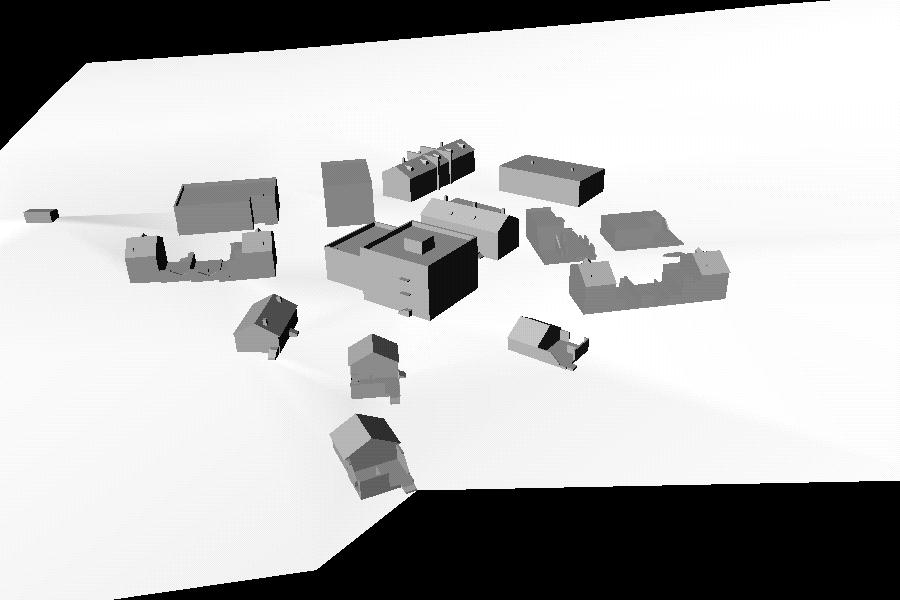


9 Pose Estimation when only shape of 3D scene is known...???????



10 Video to Site Model Alignment Model to frame alignment REFINE Correspondence-less exterior orientation from 3D-2D line pairs
11 The REGSITE Algorithm aligning site model edges to image edges... Inputs: Predicted pose of camera Un-textured (Open Inventor) site model Video frame Output: Estimated pose of camera Premise Discontinuities in 3D depth are correlated with brightness edges in the video frame (most of the time) Approach Oriented energy image pyramids highlight image edges Extract edges (depth discontinuities) from 3D site model Adjust camera pose to maximize overlap of model and image edges refinement is done using coarse to fine strategy over image pyramid


12 Oriented Energy Pyramid Oriented Energy Pyramid: 4 Orientation Bands 0 deg., 45 deg., 90 deg., 135 deg.
13 Pose Refinement Procedure Projected model lines x,y,z x,y,z Perspective projection u,v u,v E,dE/du,dE/dv 3D edges extracted from site model ^ pose θ Edge energy near orientation θ at level L Steepest descent de/dpose Projection model

14 Pose Refinement Results Iterative coarse-to-fine adjustment of pose over oriented energy pyramid


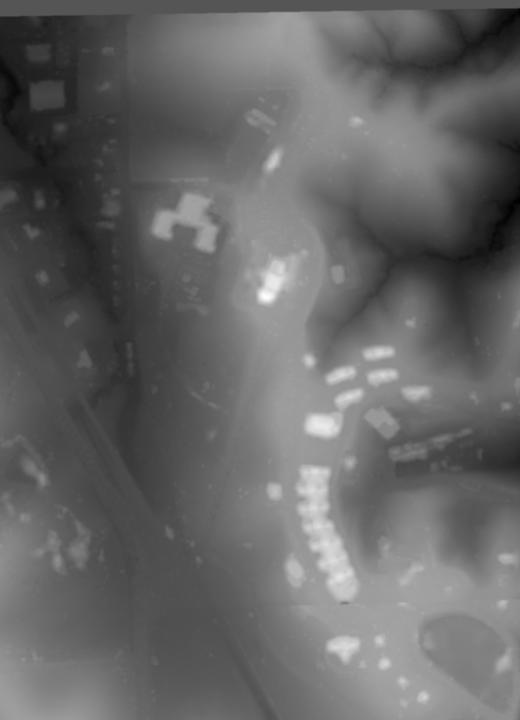
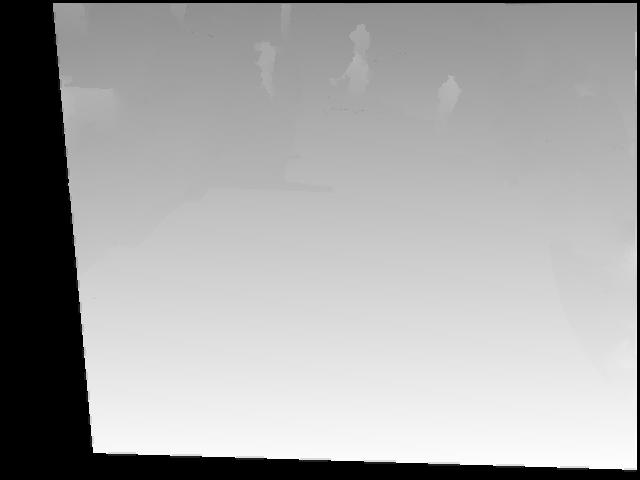
15 Geo-registration of Video Sequence from Draper Helicopter to 3D Site Models Original Video Model rendered from the pose of the helicopter sensor. Pose recovered after georegistration process Overlay of site model on video World as seen from the view-point of the runner


16 Re-projection & Enhanced Visualization of Video Geo-registration of video to site models Original Video Site model Georegistration of video to site model Re-projection of video after merging with model.
17 Application : Model-based Video Visualization
18 Immersive and Interactive Telepresence Total Facilities Visualization Multiple cameras are merged to form a unified 3D scene representation. Each observer views the scene with his own virtual camera.






19 Distributed 2D Cameras It is difficult to interpret activities viewed by multiple cameras
20 Video Flashlights Concept [EGWR 02] A tool for Global Visualization of Dynamic Environments 2D Video Flashlights: Project multiple 2D videos on a site model. Moving Object Cued Video Flashlights: Project multiple 2D videos with automatically detected moving objects on a site model. 3D Video Flashlights: Project automatically extracted dynamic object models from multiple videos on a site model.
 [VIDEO]")
21 Video Flashlights: Moving Target Cueing Moving objects (humans & vehicles) are detected and segmented from live camera videos Shown as color coded dynamic visual cues from a bird s eye view Accurate dynamic positioning w.r.t. the model provides a global context for the action Moving Target Indication (MTI) [VIDEO]

22 Video Flashlights Live video streams are draped over a site model in real-time Live videos are being viewed in the context of the model from a bird s eye view Accurate Projection of multiple video streams onto the site model Enables interpretation of visual action in the global context of the model Provides photo-realistic sky-to-street views at arbitrary scales and viewpoints

23 Video Flashlights Close up view of multiple video streams draped over the site model Close up view allows zooming onto action that is happening over multiple video cameras (video)





24 Depth Computation for continuous video streams

25 2D and 3D MTI : Results 3D method can separate shadows from moving objects 3D method provides better delineation of moving objects 3D MTI 2D MTI Camera 1 Camera 2
26 Where are we headed? From Pixels to Intermediate Representations for Immersive Visualization Immersive Communications Object / Activity Recognition Pattern Discovery Perception Cognition
27 AN IMMERSIVE IBMR GRAND CHALLENGE
28 AND IF WE DO IT RIGHT
29 Handling Moving Objects in 2D Parametric Alignment & Mosaicing
30 Multiple Motions : Robust Regression Find the dominant motion while rejecting outliers
31 r i = d - i μ Estimating the Mean i min ( ρ(r ) = μ 2 i ri ) μ = 1 N Mean is the least squares estimate But each measurement is given the same weight Influence of an outlier: δ N Can be arbitrarily large Influence is given by : ρ(r) r i d i
32 Θ i Generalized M-Estimation min ρ(r ;σ), r I p ) I ( p u( p ; )) i i = 2( i 1 i i Θ Given a solution (m) Θ at the mth iteration, find δθ by solving : &( ρ r ) r r & ρ( r ) θ = r i i i i l i r θ θ r ri θ l i i k l i i k k wi Choices of the ρ( r; i σ ) ρ& w i is a weight associated with each measurement. Can be varied to provide robustness to outliers. (r) r SS = function: 1 σ 2 ρ = SS ρ& 2 r 2σ (r) r GM 2 = ρ GM 2 2 r σ = 2 1+ r σ 2 2σ 2 (σ + r 2 ) 2 2
33 Optimization Functions & their Corresponding Weight Plots Geman-Mclure Sum-of-squares
34 Continuation Method: Coarse-to-fine


35 With Robust Functions Direct Alignment Works for Non-dominant Moving Objects Too Original two frames Background Alignment
36 Object Deletion with Layers Original Video Video Stream with deleted moving object

37 DYNAMIC MOSAICS Original Video Video Stream with deleted moving object Dynamic Mosaic Video

38 SYNOPISIS MOSAICS
39 Assumption: Problem Constraints that do not fit the dominant motion are treated as outliers : Extreme noise Problem: But they are not noise There indeed are multiple motions present in the scene
40 Motivate Simultaneous Multiple Model Estimation
41 Motivating Multiple Models Line Fitting
42
43 The expected values of the deltas at the maximum (notice the one value close to zero).
44 Closeup of the fit
45 Local maximum
46 which is an excellent fit to some points
47 and the deltas for this maximum
48 A dataset that is well fitted by four lines
49 Result of EM fitting, with one line (or at least, one available local maximum).
50 Result of EM fitting, with two lines (or at least, one available local maximum).
51 Seven lines can produce a rather logical answer
52 Motivating Multiple Models Multiple Motions

53 Independent Object Motion Objects are the Focus Camera is more or less steady
54 Independent Object Motion with Camera Pan Most common scenario for capturing performances
55 Multiple Motions may not be due only to independent object motions but due to different surfaces Or Motion Layers
56 Multiple Motions as a Segmentation & Estimation Problem If we know which pixels go with what motion, can apply the now well-known methods of motion estimation to compute the motions Alternatively, given the motion parameters, potentially can label pixels corresponding to each of the motions.
57 Represent Multiple Motions as Layers Layers Input Sequence
58 Compact Video Representation...motion and scene structure analysis... Separate coherent & significant motion & structure components Coherence : Align images using 2D/3D models of motion and structure Separate backgrounds and moving objects with layers Significance : Regions of support for various motion & structure components
59 MULTIPLE 2D PARAMETRIC MODEL ESTIMATION layered scene representation THREE ISSUES How many models? What are the model parameters? What is the spatial support layer for each model?
60 Competitive Multiple Model Estimation [Ayer,Sawhney 95 96] Model image motion in terms of a mixture of Gaussian models Layers of support represented as ownership probabilities Robust Maximum-Likelihood estimation of mixture and layer parameters using the Expectation-Maximization algorithm Minimum Description Length (MDL) encoding to select adequate number of models
61 Automatic Layer Extraction : Intuition Input Sequence Layer Motion Assume that the segmentation of pixels into layers is known, then estimating the motion is easy. E i δ T 2 SSD (u;a ) = w i(p)( I1u(p;A i) + I(p)) p R
62 Where do we get the weights from? Input Sequence Layer Motion Model each pixel as potentially belonging to N layers each with its own motion model. Assume that we know the motion model, but not the pixel ownership to the model E i δ T 2 SSD (u;a ) = w i(p)( I1u(p;A i) + I(p)) p R
63 Where do we get the weights from? Input Sequence Layer Motion Each pixel has a likelihood associated with a motion model and the two images T 1 - ( I1u(p;A i) + δi(p)) L(I2 (p) I1(p), A i) = exp( 2 2π σ 2σ w (p) = i i L(I 2 L(I (p) I 2 1 (p) I (p), A ) 1 i (p), A ) i 2 )
64 Multiple Models : Mixture Models Model an image as a density function created using a mixture of Gaussian models conditioned on the adjacent images : g f ( I(x, t) I(x, t 1), Φ) = π p( I(x, t) I(x u(x, Θ ), t 1), σ ) i i i i = 1 The mixture model is parameterized by Θ [ Π Σ Θ] Φ =,, No. of models : Ensemble of motion parameters for the g models Σ Π : Ensemble of the Gaussian distribution parameters for the models : Ensemble of the ownership layers for the models
65 Mixture Models represent layer ownerships as binary hidden variables... Z = { z (p ),i = 1..g, j 1..N} i j = is a set of binary indicator variables representing the model labels. The stochastic model for the complete data, measurements and hidden variables is: f (I,Z Φ) = f(i Z,Φ)p(Z Φ) Observation Likelihood Prior on the labels
66 Mixture Model Estimation The Expectation-Maximization (EM) Algorithm Maximize the negative log-likelihood of the parameters given the observations : L( Φ I, Z ) = log( f ( I, Z Φ)) Define the expectation of the likelihood : Q( Φ Φˆ ) = E [ (, ), ( ) ] k L Φ I Z I Φ ( k ) ˆ Mixing Proportions Ownership g ( ) ( ( ( k ) i p i x, Φˆ )+ i= 1 x Data Likelihood g ( ) ( ) ( k ) ( k ) log pl ( I( x) Φˆ p i x, Φˆ i= 1 x k ) Q( Φ Φˆ ) = log π
67 The EM Algorithm iterate between layer and motion estimation... (0) Starting with an initial estimate repeat : (k) E-step : Compute the function Q(Φ ) Φˆ Given the current estimate of the alignment parameters, compute the layer ownerships. Φˆ M-step : Compute (k + 1) (k ) Φˆ = arg max Q (Φ Φˆ ) Given the layer ownerships compute the alignment parameters. Φ
68 Model Selection We wish to choose a model to fit to data e.g. is it a line or a circle? e.g is this a perspective or orthographic camera? e.g. is there an aeroplane there or is it noise? Issue In general, models with more parameters will fit a dataset better, but are poorer at prediction This means we can t simply look at the negative log-likelihood (or fitting error)
69 Top is not necessarily a better fit than bottom (actually, almost always worse)
70
71 We can discount the fitting error with some term in the number of parameters in the model.
72 How Many Models Are Adequate? Minimum Description Length (MDL) encoding for Optimizing Modeling Complexity Define model complexity as the total number of bits needed to encode the data and the models: { I( p } { } j ), Φ ) = LM ( Φ) + L ( ( ) D I p 42 j 4 L( Φ) 4 3 Model Encoding Length (including pixel ownerships) Data Encoding Length (residuals after alignment) Find the optimum number of models and the model parameters that minimize the total encoding complexity.
73 The Complete Algorithm INITIALIZATION EM-step Scale and motion parameters initial estimates E-step: computation of ownership probabilitities M-step: computation of motion and scale parameters MAP-step: motion labeling using a MAP criterion MDL-step: selection of the number of models and outlier detection MAP segmentation MDL-step



74 Automatic Extraction of 2D Layers Layers Input Sequence

75 Automatic Extraction of 2D Layers Layers Input Sequence
76
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Applications of Image Motion Estimation I
 Applications of Image Motion Estimation I Mosaicing Princeton University COS 429 Lecture Oct. 16, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Visual Motion Estimation : Recapitulation Plan Explain optical
Applications of Image Motion Estimation I Mosaicing Princeton University COS 429 Lecture Oct. 16, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Visual Motion Estimation : Recapitulation Plan Explain optical
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Missing variable problems
 Missing variable problems In many vision problems, if some variables were known the maximum likelihood inference problem would be easy fitting; if we knew which line each token came from, it would be easy
Missing variable problems In many vision problems, if some variables were known the maximum likelihood inference problem would be easy fitting; if we knew which line each token came from, it would be easy
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Marcel Worring Intelligent Sensory Information Systems
 Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Segmentation: Clustering, Graph Cut and EM
 Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
IMAGE SEGMENTATION. Václav Hlaváč
 IMAGE SEGMENTATION Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/ hlavac, hlavac@fel.cvut.cz
IMAGE SEGMENTATION Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/ hlavac, hlavac@fel.cvut.cz
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Pattern Recognition. Kjell Elenius. Speech, Music and Hearing KTH. March 29, 2007 Speech recognition
 Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
FMA901F: Machine Learning Lecture 3: Linear Models for Regression. Cristian Sminchisescu
 FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Preprocessing II: Between Subjects John Ashburner
 Preprocessing II: Between Subjects John Ashburner Pre-processing Overview Statistics or whatever fmri time-series Anatomical MRI Template Smoothed Estimate Spatial Norm Motion Correct Smooth Coregister
Preprocessing II: Between Subjects John Ashburner Pre-processing Overview Statistics or whatever fmri time-series Anatomical MRI Template Smoothed Estimate Spatial Norm Motion Correct Smooth Coregister
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Clustering Lecture 5: Mixture Model
 Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Spatio-Temporal Stereo Disparity Integration
 Spatio-Temporal Stereo Disparity Integration Sandino Morales and Reinhard Klette The.enpeda.. Project, The University of Auckland Tamaki Innovation Campus, Auckland, New Zealand pmor085@aucklanduni.ac.nz
Spatio-Temporal Stereo Disparity Integration Sandino Morales and Reinhard Klette The.enpeda.. Project, The University of Auckland Tamaki Innovation Campus, Auckland, New Zealand pmor085@aucklanduni.ac.nz
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Announcements. Computer Vision I. Motion Field Equation. Revisiting the small motion assumption. Visual Tracking. CSE252A Lecture 19.
 Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2017
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2017 Assignment 3: 2 late days to hand in tonight. Admin Assignment 4: Due Friday of next week. Last Time: MAP Estimation MAP
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2017 Assignment 3: 2 late days to hand in tonight. Admin Assignment 4: Due Friday of next week. Last Time: MAP Estimation MAP
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2016
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Representing Moving Images with Layers. J. Y. Wang and E. H. Adelson MIT Media Lab
 Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Spatial Outlier Detection
 Spatial Outlier Detection Chang-Tien Lu Department of Computer Science Northern Virginia Center Virginia Tech Joint work with Dechang Chen, Yufeng Kou, Jiang Zhao 1 Spatial Outlier A spatial data point
Spatial Outlier Detection Chang-Tien Lu Department of Computer Science Northern Virginia Center Virginia Tech Joint work with Dechang Chen, Yufeng Kou, Jiang Zhao 1 Spatial Outlier A spatial data point
K-Means Clustering. Sargur Srihari
 K-Means Clustering Sargur srihari@cedar.buffalo.edu 1 Topics in Mixture Models and EM Mixture models K-means Clustering Mixtures of Gaussians Maximum Likelihood EM for Gaussian mistures EM Algorithm Gaussian
K-Means Clustering Sargur srihari@cedar.buffalo.edu 1 Topics in Mixture Models and EM Mixture models K-means Clustering Mixtures of Gaussians Maximum Likelihood EM for Gaussian mistures EM Algorithm Gaussian
CS 2750 Machine Learning. Lecture 19. Clustering. CS 2750 Machine Learning. Clustering. Groups together similar instances in the data sample
 Lecture 9 Clustering Milos Hauskrecht milos@cs.pitt.edu 539 Sennott Square Clustering Groups together similar instances in the data sample Basic clustering problem: distribute data into k different groups
Lecture 9 Clustering Milos Hauskrecht milos@cs.pitt.edu 539 Sennott Square Clustering Groups together similar instances in the data sample Basic clustering problem: distribute data into k different groups
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
MultiDimensional Signal Processing Master Degree in Ingegneria delle Telecomunicazioni A.A
 MultiDimensional Signal Processing Master Degree in Ingegneria delle Telecomunicazioni A.A. 205-206 Pietro Guccione, PhD DEI - DIPARTIMENTO DI INGEGNERIA ELETTRICA E DELL INFORMAZIONE POLITECNICO DI BARI
MultiDimensional Signal Processing Master Degree in Ingegneria delle Telecomunicazioni A.A. 205-206 Pietro Guccione, PhD DEI - DIPARTIMENTO DI INGEGNERIA ELETTRICA E DELL INFORMAZIONE POLITECNICO DI BARI
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007.
 CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007. Many image features, such as image lines, curves, local image velocity, and local stereo disparity, can be
CS787: Assignment 3, Robust and Mixture Models for Optic Flow Due: 3:30pm, Mon. Mar. 12, 2007. Many image features, such as image lines, curves, local image velocity, and local stereo disparity, can be
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Optical Flow Estimation
 Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Introduction to Image Super-resolution. Presenter: Kevin Su
 Introduction to Image Super-resolution Presenter: Kevin Su References 1. S.C. Park, M.K. Park, and M.G. KANG, Super-Resolution Image Reconstruction: A Technical Overview, IEEE Signal Processing Magazine,
Introduction to Image Super-resolution Presenter: Kevin Su References 1. S.C. Park, M.K. Park, and M.G. KANG, Super-Resolution Image Reconstruction: A Technical Overview, IEEE Signal Processing Magazine,
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Video Alignment. Literature Survey. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013
 Your Name: Your student id: Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013 Problem 1 [5+?]: Hypothesis Classes Problem 2 [8]: Losses and Risks Problem 3 [11]: Model Generation
Your Name: Your student id: Solution Sketches Midterm Exam COSC 6342 Machine Learning March 20, 2013 Problem 1 [5+?]: Hypothesis Classes Problem 2 [8]: Losses and Risks Problem 3 [11]: Model Generation
Computer Vision Group Prof. Daniel Cremers. 8. Boosting and Bagging
 Prof. Daniel Cremers 8. Boosting and Bagging Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T
Prof. Daniel Cremers 8. Boosting and Bagging Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Mixture Models and the EM Algorithm
 Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Normalized Texture Motifs and Their Application to Statistical Object Modeling
 Normalized Texture Motifs and Their Application to Statistical Obect Modeling S. D. Newsam B. S. Manunath Center for Applied Scientific Computing Electrical and Computer Engineering Lawrence Livermore
Normalized Texture Motifs and Their Application to Statistical Obect Modeling S. D. Newsam B. S. Manunath Center for Applied Scientific Computing Electrical and Computer Engineering Lawrence Livermore
CS Introduction to Data Mining Instructor: Abdullah Mueen
 CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
Clustering. CE-717: Machine Learning Sharif University of Technology Spring Soleymani
 Clustering CE-717: Machine Learning Sharif University of Technology Spring 2016 Soleymani Outline Clustering Definition Clustering main approaches Partitional (flat) Hierarchical Clustering validation
Clustering CE-717: Machine Learning Sharif University of Technology Spring 2016 Soleymani Outline Clustering Definition Clustering main approaches Partitional (flat) Hierarchical Clustering validation
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Machine Learning. B. Unsupervised Learning B.1 Cluster Analysis. Lars Schmidt-Thieme, Nicolas Schilling
 Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Image segmentation. Václav Hlaváč. Czech Technical University in Prague
 Image segmentation Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics and Faculty of Electrical
Image segmentation Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics and Faculty of Electrical
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
An Efficient Model Selection for Gaussian Mixture Model in a Bayesian Framework
 IEEE SIGNAL PROCESSING LETTERS, VOL. XX, NO. XX, XXX 23 An Efficient Model Selection for Gaussian Mixture Model in a Bayesian Framework Ji Won Yoon arxiv:37.99v [cs.lg] 3 Jul 23 Abstract In order to cluster
IEEE SIGNAL PROCESSING LETTERS, VOL. XX, NO. XX, XXX 23 An Efficient Model Selection for Gaussian Mixture Model in a Bayesian Framework Ji Won Yoon arxiv:37.99v [cs.lg] 3 Jul 23 Abstract In order to cluster
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Data Mining. Clustering. Hamid Beigy. Sharif University of Technology. Fall 1394
 Data Mining Clustering Hamid Beigy Sharif University of Technology Fall 1394 Hamid Beigy (Sharif University of Technology) Data Mining Fall 1394 1 / 31 Table of contents 1 Introduction 2 Data matrix and
Data Mining Clustering Hamid Beigy Sharif University of Technology Fall 1394 Hamid Beigy (Sharif University of Technology) Data Mining Fall 1394 1 / 31 Table of contents 1 Introduction 2 Data matrix and