Robotics Configuration of Robot Manipulators
|
|
|
- Reynard McDonald
- 5 years ago
- Views:
Transcription
1 Robotics Configuration of Robot Manipulators
2 Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics
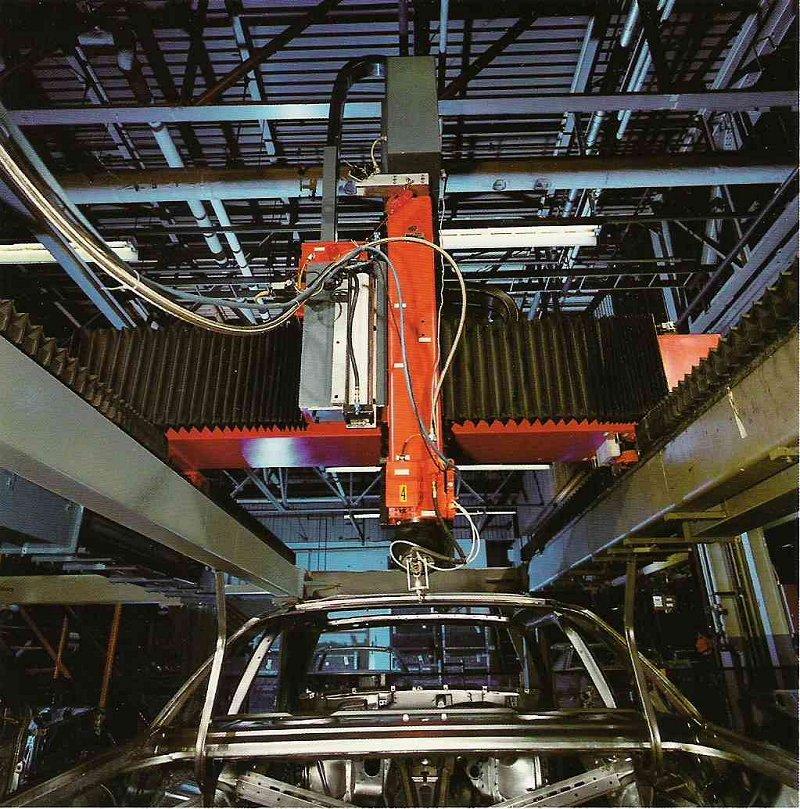
3 I. Cartesian Geometry Also called rectangular, rectilinear, gantry Robot has the ability to move its gripper to any position within the cube or rectangle defined as its work envelope (3L) Three linear movements

4 Cartesian/Gantry Robot
5 Cartesian Applications Materials handling Parts handling related to machine loading/unloading supply bins Assembly of small systems Example: Electronic printed circuit board assembly

6 Cartesian/Gantry Robot
7 Cartesian Advantages Very large work envelopes are made possible Overhead mounting leaves floor space for other uses Simpler control systems

8 Cartesian/Gantry Robot
9 Cartesian Disadvantages Access to the work envelope by overhead crane or other materialhandling equipment may be impaired Maintenance may be difficult
10 II. Cylindrical Geometry Robot can move its gripper within a volume that is described by a cylinder (2L1R) Two linear movements, one rotational

11 Cylindrical Robot
12 Cylindrical Advantages Horizontal reach into production machines is possible Vertical structure of the machine conserves floor space Rigid structure, allows large payloads and good repeatability
13 Cylindrical Disadvantages Most cannot rotate a full 360 degrees because of mechanical design limitations
14 Cylindrical Robot
15 III. Spherical Geometry Also called Polar Spherical shaped work envelope (2R1L) Two rotations, one linear extension


16 Spherical Robot
17 Spherical Applications Mounted on machinery to load/unload parts Spherical robots have lost practicality in the workplace due to articulated (4 & 6 axes) robots
18 Spherical Advantages Fully capable of 360 degree rotations. Long horizontal reach
19 Spherical Disadvantages Lower profile, no linear actuator for the Z-axis Small work envelope
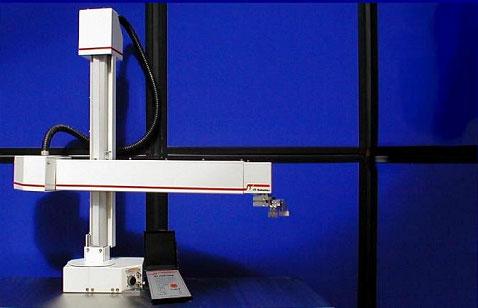
20 IV. Articulated Geometry (3R) Three rotational movements Two variants: vertically or horizontally articulated (SCARA-selective compliant articulated robotic arm) Vertically- additional rotary axis or linear axis for the forearm link - Also called Jointed-Arm, Revolute, or Anthropomorphic Horizontally- two angular positioning movements and one linear movement

21 Vertically Articulated Robot

22 Vertically Articulated Robot

23 Horizontally Articulated Robot
24 Articulated Advantages Occupies a minimum of floor space A good size-to-reach ratio, achieves more reach High positioning mobility of the end-of-arm tooling allows the arm to reach into enclosures and around obstructions
25 Articulated Disadvantages Has the need for more sophisticated control requirements Higher associated costs Despite any disadvantages, articulated robots dominate the automated world today. They are known for their speed and agility.
26 V. Parallel Kinematics A parallel manipulator is designed so that each chain is usually short, simple and can thus be rigid against unwanted movement, compared to a serial manipulator. Errors in one chain's positioning are averaged in conjunction with the others, rather than being cumulative. Each actuator must still move within its own degree of freedom, as for a serial robot; however in the parallel robot the off-axis flexibility of a joint is also constrained by the effect of the other chains. It is this closed-loop stiffness that makes the overall parallel manipulator stiff relative to its components, unlike the serial chain that becomes progressively less rigid with more components.
27 V. Parallel Kinematics

28 V. Parallel Kinematics

29 V. Parallel Kinematics
30 Advantages of Parallel Kinematics The result of the parallel design is a robot that has increased stability and arm rigidity, Faster cycle times than serial technology.
31 Disadvantages of Parallel Kinematics kinematic robots is they tend to have a relatively large footprint-to-workspace ratio.
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
 Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
On the basis of degree of freedom of the arm and the type of joints used, a robotic arm can have any of the following designs:
 Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering
Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering
Robot Transport Unit. Extend Reach and Add 7th Axis Capabilities
 Robot Transport Unit Extend Reach and Add 7th Axis Capabilities 1 Help my robot can t reach that far! Robots have become pervasive in manufacturing worldwide. According to the Association for Advancing
Robot Transport Unit Extend Reach and Add 7th Axis Capabilities 1 Help my robot can t reach that far! Robots have become pervasive in manufacturing worldwide. According to the Association for Advancing
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
MICRO-CONTROLLER BASED ROBOT ARM WITH THREE-DIMENSIONAL REACH
 - 111 - MICRO-CONTROLLER BASED ROBOT ARM WITH THREE-DIMENSIONAL REACH R.A.D.M.P.Ranwaka 1, T. J. D. R. Perera, J. Adhuran, C. U. Samarakoon, R.M.T.P. Rajakaruna ABSTRACT Department of Mechatronics Engineering,
- 111 - MICRO-CONTROLLER BASED ROBOT ARM WITH THREE-DIMENSIONAL REACH R.A.D.M.P.Ranwaka 1, T. J. D. R. Perera, J. Adhuran, C. U. Samarakoon, R.M.T.P. Rajakaruna ABSTRACT Department of Mechatronics Engineering,
DESIGN AND DEVELOPMENT OF 2-R 2-DOF FORCE CONTROLLED ROBOT
 DESIGN AND DEVELOPMENT OF 2-R 2-DOF FORCE CONTROLLED ROBOT Kemparaju C R 1, Chetan Kumar D S 2,Ronald Reagon R 3 1,2,3 Assistant Professor, Department of Mechanical Engineering, New Horizon College of
DESIGN AND DEVELOPMENT OF 2-R 2-DOF FORCE CONTROLLED ROBOT Kemparaju C R 1, Chetan Kumar D S 2,Ronald Reagon R 3 1,2,3 Assistant Professor, Department of Mechanical Engineering, New Horizon College of
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
White paper Cartesian handling systems a technical comparison with conventional robots
 White paper Cartesian handling a technical comparison with conventional robots Why is it worthwhile to use Cartesian handling? The trend in conventional assembly and handling solutions is moving from robots
White paper Cartesian handling a technical comparison with conventional robots Why is it worthwhile to use Cartesian handling? The trend in conventional assembly and handling solutions is moving from robots
High-Accuracy Articulated Mobile Robots
 High-Accuracy Articulated Mobile Robots 2017-01-2095 Timothy Jackson Electroimpact Inc. Published 09/19/2017 CITATION: Jackson, T., "High-Accuracy Articulated Mobile Robots," SAE Technical Paper 2017-01-2095,
High-Accuracy Articulated Mobile Robots 2017-01-2095 Timothy Jackson Electroimpact Inc. Published 09/19/2017 CITATION: Jackson, T., "High-Accuracy Articulated Mobile Robots," SAE Technical Paper 2017-01-2095,
MEAM 520. Manipulator Kinematics
 MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
A Simple Technique to Passively Gravity-Balance Articulated Mechanisms
 A Simple Technique to Passively Gravity-Balance Articulated Mechanisms Tariq Rahman, Ph.D. Research Engineer University of Delaware/A.I. dupont Institute Applied Science and Engineering Laboratories A.I.
A Simple Technique to Passively Gravity-Balance Articulated Mechanisms Tariq Rahman, Ph.D. Research Engineer University of Delaware/A.I. dupont Institute Applied Science and Engineering Laboratories A.I.
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Mission and vision of the Department Vision of Mechanical Department. Program Educational Objectives:
 Mission and vision of the Department Vision of Mechanical Department To establish the state of the art learning center in Mechanical Engineering which will impart global competence, enterprising skills,
Mission and vision of the Department Vision of Mechanical Department To establish the state of the art learning center in Mechanical Engineering which will impart global competence, enterprising skills,
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1
 Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1 IJCTA, 9(12), 2016, pp. 5687-5695 International Science Press Investigation and Evaluation of Embedded
Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1 IJCTA, 9(12), 2016, pp. 5687-5695 International Science Press Investigation and Evaluation of Embedded
Robotics. 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1
 2001, Ernest L. Hall, University of Cincinnati 1") Robotics 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1 Course objective To provide a broad understanding of the use of industrial robots And an experience in specifying, designing and
Robotics 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1 Course objective To provide a broad understanding of the use of industrial robots And an experience in specifying, designing and
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
An inverse kinematics approach to hexapod design and control
 An inverse kinematics approach to hexapod design and control Frank A. DeWitt IV Melles Griot, 55 Science Parkway, Rochester, NY 1460 phone +1 585 44-70; email mgoptics@idexcorp.com COPYRIGHT 009 Society
An inverse kinematics approach to hexapod design and control Frank A. DeWitt IV Melles Griot, 55 Science Parkway, Rochester, NY 1460 phone +1 585 44-70; email mgoptics@idexcorp.com COPYRIGHT 009 Society
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Rebecca R. Romatoski. B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006
 Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Rotating Table with Parallel Kinematic Featuring a Planar Joint
 Rotating Table with Parallel Kinematic Featuring a Planar Joint Stefan Bracher *, Luc Baron and Xiaoyu Wang Ecole Polytechnique de Montréal, C.P. 679, succ. C.V. H3C 3A7 Montréal, QC, Canada Abstract In
Rotating Table with Parallel Kinematic Featuring a Planar Joint Stefan Bracher *, Luc Baron and Xiaoyu Wang Ecole Polytechnique de Montréal, C.P. 679, succ. C.V. H3C 3A7 Montréal, QC, Canada Abstract In
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Fundamentals of Inverse Kinematics Using Scara Robot
 Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Chapter 4. Mechanism Design and Analysis
 Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT
 DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT V. BRODSKY, D. GLOZMAN AND M. SHOHAM Department of Mechanical Engineering Technion-Israel Institute of Technology Haifa, 32000 Israel E-mail:
DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT V. BRODSKY, D. GLOZMAN AND M. SHOHAM Department of Mechanical Engineering Technion-Israel Institute of Technology Haifa, 32000 Israel E-mail:
Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace
 Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace T. Brogårdh, S. Hanssen, ABB Automation Technologies, Robotics,Västerås, Sweden G. Hovland, The University of Queensland
Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace T. Brogårdh, S. Hanssen, ABB Automation Technologies, Robotics,Västerås, Sweden G. Hovland, The University of Queensland
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Chapter 2 Mechanisms Abstract
 Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks
 Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks J. Hesselbach, A. Raatz, J. Wrege, S. Soetebier Institute of Machine Tools and Production Technology IWF Technical
Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks J. Hesselbach, A. Raatz, J. Wrege, S. Soetebier Institute of Machine Tools and Production Technology IWF Technical
This overview summarizes topics described in detail later in this chapter.
 20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Assignment 3. Position of the center +/- 0.1 inches Orientation +/- 1 degree. Decal, marker Stereo, matching algorithms Pose estimation
 Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Computer Life (CPL) ISSN: Finite Element Analysis of Bearing Box on SolidWorks
 ISSN: Finite Element Analysis of Bearing Box on SolidWorks") Computer Life (CPL) ISSN: 1819-4818 Delivering Quality Science to the World Finite Element Analysis of Bearing Box on SolidWorks Chenling Zheng 1, a, Hang Li 1, b and Jianyong Li 1, c 1 Shandong University
Computer Life (CPL) ISSN: 1819-4818 Delivering Quality Science to the World Finite Element Analysis of Bearing Box on SolidWorks Chenling Zheng 1, a, Hang Li 1, b and Jianyong Li 1, c 1 Shandong University
TS60 ESD. SCARA industrial robot Electronics industry
 TS60 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability
TS60 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability
TS80 ESD. SCARA industrial robot - Electronics industry
 TS80 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability
TS80 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Novel 6-DOF parallel manipulator with large workspace Daniel Glozman and Moshe Shoham
 Robotica: page 1 of 5. 2009 Cambridge University Press doi:10.1017/s0263574708005286 Novel 6-DOF parallel manipulator with large workspace Daniel Glozman and Moshe Shoham Robotics Laboratory, Department
Robotica: page 1 of 5. 2009 Cambridge University Press doi:10.1017/s0263574708005286 Novel 6-DOF parallel manipulator with large workspace Daniel Glozman and Moshe Shoham Robotics Laboratory, Department
TS60 ESD. SCARA industrial robot Electronics industry
 TS60 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial need Designed to work in the most hostile speed, repeatability or reliability,
TS60 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial need Designed to work in the most hostile speed, repeatability or reliability,
Chapter 1 Introduction
 Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS
 International Journal of Advances in Scientific Research and Engineering (ijasre) ISSN: 2454-8006 [Vol. 03, Issue 4, May -2017] OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS Mangal
International Journal of Advances in Scientific Research and Engineering (ijasre) ISSN: 2454-8006 [Vol. 03, Issue 4, May -2017] OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS Mangal
Human Motion. Session Speaker Dr. M. D. Deshpande. AML2506 Biomechanics and Flow Simulation PEMP-AML2506
 AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
TS60. 4 axis industrial robot - SCARA
 TS60 4 axis industrial robot SCARA A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability and reliability,
TS60 4 axis industrial robot SCARA A unique 4 axis and 6 axis robot range for all applications Whenever industrial companies need speed, Designed to work in the most hostile repeatability and reliability,
SINUMERIK 840D sl - OEM. Kinematic Transformation Configuration Questions. Preface. Transformation Questions. Appendix. Configuration Manual 10/2008
 Preface SINUMERIK 840D sl - OEM Transformation Questions Appendix 1 A Kinematic Transformation Configuration Questions Configuration Manual Valid for Control SINUMERIK 840D sl SINUMERIK 840DE sl (export
Preface SINUMERIK 840D sl - OEM Transformation Questions Appendix 1 A Kinematic Transformation Configuration Questions Configuration Manual Valid for Control SINUMERIK 840D sl SINUMERIK 840DE sl (export
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR
 INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1, Wan Nurshazwani Wan Zakaria 1, Jamaludin Jalani 2 and Mohd Razali Md Tomari 1 1 Advanced Mechatronics Research Group
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1, Wan Nurshazwani Wan Zakaria 1, Jamaludin Jalani 2 and Mohd Razali Md Tomari 1 1 Advanced Mechatronics Research Group
Why Epson Robots? Leading Epson technology. What you need, when you need it. Intuitive programming software. Reliability you can count on
 SCARA ROBOTS Why Epson Robots? As precision automation specialists, the Epson Robots team has been building automation products for over 35 years. Leading the industry in small-parts-assembly applications,
SCARA ROBOTS Why Epson Robots? As precision automation specialists, the Epson Robots team has been building automation products for over 35 years. Leading the industry in small-parts-assembly applications,
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Parallel Manipulators with a Rotation-Symmetric Arm System
 Parallel Manipulators with a Rotation-Symmetric Arm System Mats Isaksson Centre for Intelligent Systems Research Deakin University 75 Pigdons Road, Waurn Ponds VIC 36 Australia Email: mats.isaksson@gmail.com
Parallel Manipulators with a Rotation-Symmetric Arm System Mats Isaksson Centre for Intelligent Systems Research Deakin University 75 Pigdons Road, Waurn Ponds VIC 36 Australia Email: mats.isaksson@gmail.com
MC-E - Motion Control
 IDC Technologies - Books - 1031 Wellington Street West Perth WA 6005 Phone: +61 8 9321 1702 - Email: books@idconline.com MC-E - Motion Control Price: $139.94 Ex Tax: $127.22 Short Description This manual
IDC Technologies - Books - 1031 Wellington Street West Perth WA 6005 Phone: +61 8 9321 1702 - Email: books@idconline.com MC-E - Motion Control Price: $139.94 Ex Tax: $127.22 Short Description This manual
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR
 www.arpnjournals.com INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1a, Wan Nurshazwani Wan Zakaria 1b, Jamaludin Jalani 2c, Mohd Razali Md Tomari 1d 1 ADvanced Mechatronics
www.arpnjournals.com INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1a, Wan Nurshazwani Wan Zakaria 1b, Jamaludin Jalani 2c, Mohd Razali Md Tomari 1d 1 ADvanced Mechatronics
Flexure-Based 6-Axis Alignment Module for Automated Laser Assembly
 Flexure-Based 6-Axis Alignment Module for Automated Laser Assembly Christian Brecher, Nicolas Pyschny, and Jan Behrens Fraunhofer Institute for Production Technology IPT, Department for Production Machines,
Flexure-Based 6-Axis Alignment Module for Automated Laser Assembly Christian Brecher, Nicolas Pyschny, and Jan Behrens Fraunhofer Institute for Production Technology IPT, Department for Production Machines,
TS80 ESD. SCARA industrial robot - Electronics industry
 TS80 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial need Designed to work in the most hostile speed, repeatability or reliability,
TS80 ESD SCARA industrial robot Electronics industry A unique 4 axis and 6 axis robot range for all applications Whenever industrial need Designed to work in the most hostile speed, repeatability or reliability,
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory
 An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory Roshdy Foaad Abo-Shanab Kafr Elsheikh University/Department of Mechanical Engineering, Kafr Elsheikh,
An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory Roshdy Foaad Abo-Shanab Kafr Elsheikh University/Department of Mechanical Engineering, Kafr Elsheikh,
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
On the feasibility of utilising gearing to extend the rotational workspace of a class of parallel robots
 On the feasibility of utilising gearing to extend the rotational workspace of a class of parallel robots Citation of final article: Isaksson, Mats, Nyhof, Luke and Nahavandi, Saeid 2015, On the feasibility
On the feasibility of utilising gearing to extend the rotational workspace of a class of parallel robots Citation of final article: Isaksson, Mats, Nyhof, Luke and Nahavandi, Saeid 2015, On the feasibility
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Research on Control Characteristics of Three Axis Paraleel Mechanism Based on Pic16f84a
 International Journal of Engineering and Technologies Submitted: 2018-04-25 ISSN: 2297-623X, Vol. 14, pp 31-37 Accepted: 2018-07-19 doi:10.18052/www.scipress.com/ijet.14.31 Online: 2018-09-21 2018 SciPress
International Journal of Engineering and Technologies Submitted: 2018-04-25 ISSN: 2297-623X, Vol. 14, pp 31-37 Accepted: 2018-07-19 doi:10.18052/www.scipress.com/ijet.14.31 Online: 2018-09-21 2018 SciPress
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS
 Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs