METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES
|
|
|
- Oliver Goodman
- 5 years ago
- Views:
Transcription
1 METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab.
2 Outlne Work goal Work motvaton State of the art Calbraton model Implementaton detals Results


3 Work Objectve The goal s the estmaton of rgd moton transformaton between a Laser Range Scanner and an Imagng System (External Calbraton), whch s needed to acheve the accurate algnment of the 3D range profles on a matched vdeo. ( R, t) : R SO(3), t 3
4 Work Motvaton The accurate co-regstraton of heterogeneous data s a fundamental requrement for a robotc systems, performng autonomous operatons: Object pose estmaton, dockng, trackng, graspng, etc.; Rover Autonomous Navgaton, Laser aded vsual SLAM; Geometrc documentaton and object nspecton; Sensor aded exposure of magng systems; anytme range profles and mage raster maps need to be jontly processed to gather knowledge about the surroundng envronment.
5 State of the art!! No extensve lterature s avalable on ths topc. I. P. Núñez and al. - Data Fuson Calbraton for a 3D Laser Range Fnder and a Camera usng Inertal Data. (ECMR 2009). II. R. Unnkrshnan and al. - Fast extrnsc calbraton of a laser rangefnder to a camera. Techncal Report CMU-RI-TR III. L. Huang and al. - A Novel Mult-Planar LIDAR and Computer Vson Calbraton Procedure Usng 2D Patterns for Automated Navgaton. IEEE Intellgent Vehcle Symposum IV. S. Kumar and al. - Sensor Fuson of Laser & Stereo Vson Camera for Depth Estmaton and Obstacle Avodance. Int. Journal of Computer Applcatons. Num. 26:3. Need of a mddle-man sensor (AHRS); Algorthm do not cope wth 1D lasers scanners; Geometrc entty used for calbraton may not be easly and accurately extracted from raw data (planes); Not real calbraton (generaton of rough navgaton maps);
6 Calbraton Model SE(3) H C S L Geometrc Entty Camera Laser Scanner Back-projected plane l Image lne l P H P C S C S C P
7 Calbraton Model L 1,..., N C l C 1,..., N 1,..., N S P 1,..., N H SC mn HSE(3) 1.. N d C SC S C T S, H P l R P t 1.. N



8 Calbraton Tool Implementaton Detals

")
")
 C l")


9 Implementaton Detals Lne extracton from mages Lne Detecton by Hough Transform (RED) Lne Refnement Based on GL 10 Flterng (GREEN) Bsector Segment Extracton (YELLOW) C l 1,..., N L.Sorg - Edgelet Trackng usng Gauss-Laguerre Crcular Harmonc Flters. Paper submtted to IEEE ICIP 2011.


10 Implementaton Detals Lne extracton from range profles Spot Detecton by maxmum curvature k r 2 2r' 2 rr'' r r' 2 Spot Refnement by Local Parabolc Fttng S P 1,..., N
11 Implementaton Detals External Calbraton estmaton External calbraton ntalzaton by vsual nspecton ( easy! ) R z H dp J d d t P R dr l P H d d S T C S C S C 0, Implct enforcement of SO(3) constrant n LM scheme; Analytcal computaton of error terms Jacoban. T T T S T C d S T C d d dp I t P R l J t P R l d 3 0


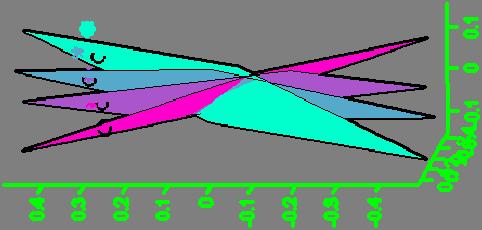
![rangng n the nterval [0-10] px; 100 test](/docs-images/82/85115055/images/12-3.jpg "for each nose level.")
12 Results on synthetc data Synthetcally generated scene gven by 20 lnes n 3D space; Image ponts corrupted by addtve whte Gaussan nose; Nose std.dev. rangng n the nterval [0-10] px; 100 test for each nose level. e rot R T Rˆ 180 [deg] e tr t tˆ 100 t [%] N N


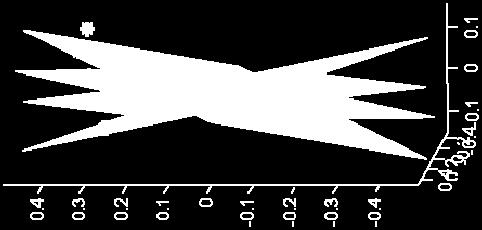
 ; Numer of lnes rangng n the nterval")
![[5-200]; 100 test for each scene](/docs-images/82/85115055/images/13-4.jpg "complexty level.")
13 Results on synthetc data Synthetcally generated scene gven by N lnes n 3D space; Image ponts corrupted by addtve whte Gaussan nose wth fxed ntensty ( 3 px std.dev.) ; Numer of lnes rangng n the nterval [5-200]; 100 test for each scene complexty level. e rot R T Rˆ 180 [deg] e tr t tˆ 100 t [%] Nlnes Nlnes
 x 964(V) 6 mm lens (43 H Fov)")

14 Laser Camera system Results on real system Pont Grey Chameleon 1296(H) x 964(V) 6 mm lens (43 H Fov) Hokuyo Scannng Range Fnder UTM-30LX 30m x 270 scannng range 0.25 angular resoluton Accuracy ±30mm [ 0.1m : 10 m ]

15 Results on real system Optmzaton Process dp dp 0 Err Err 0 t


16 Results on real system Optmzaton Process
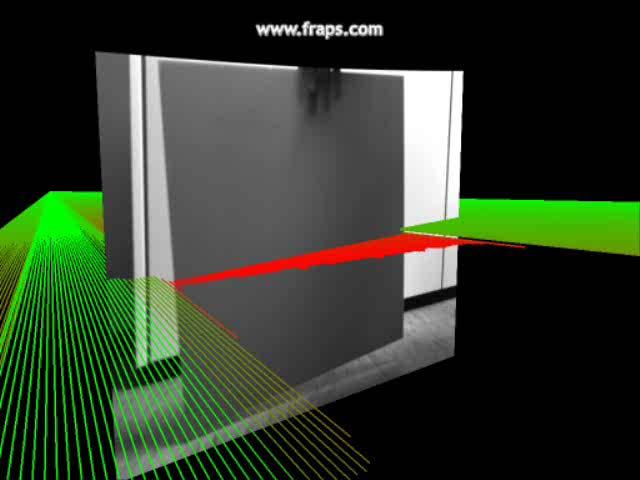
17 Results
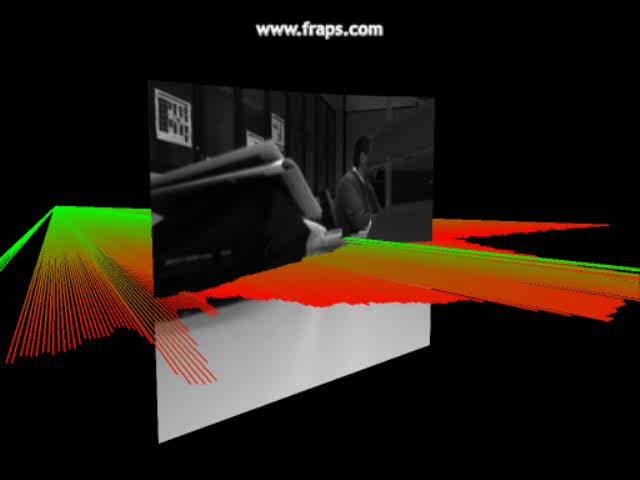
18 Results
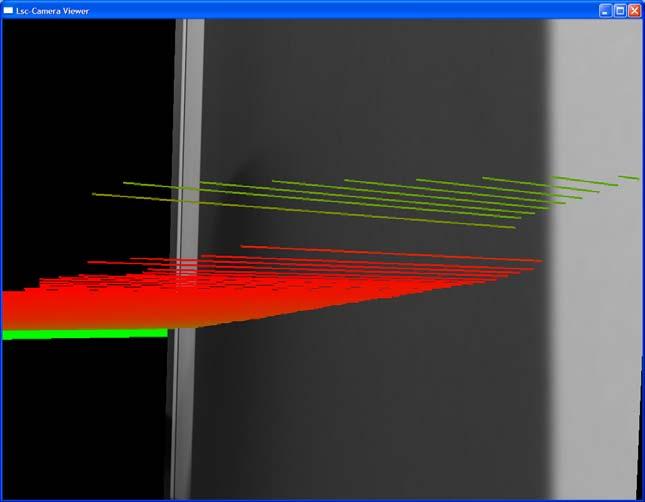
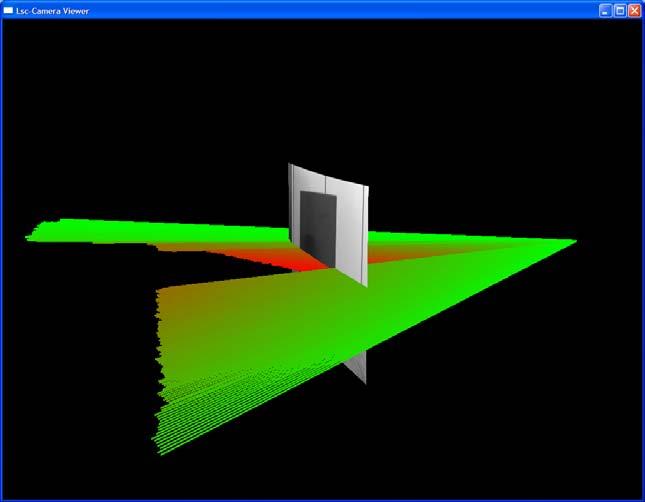
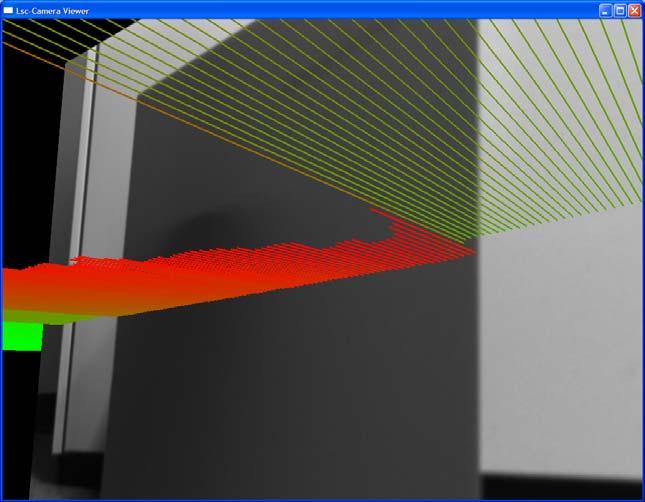
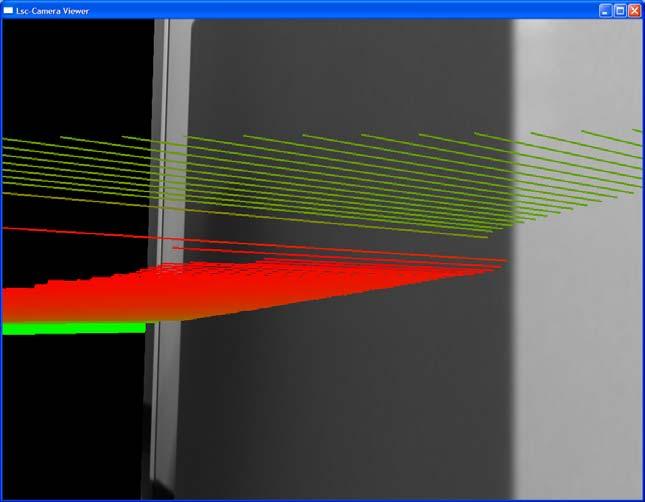
19 Results
20 Conclusons A technque to estmate the External Calbraton of a Laser-Camera system has been proposed; The technque uses 3D straght lnes as calbraton geometrcal entty; Support algorthms have been defned to accuratly collect the calbraton dataset from laser profles and mages; The algorthm provdes a core utlty for any multsensor platform performng some robotc operaton (object trackng, pose estmaton, scene exploraton, geometry retrval, etc. ); The algorthm s sutable for offlne calbraton and onlne calbraton recovery; Straghforward extenson to the case of stereocamera or multcamera.
21 Thank you for attenton!
Fitting and Alignment
 Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
Multi-stable Perception. Necker Cube
 Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
What are the camera parameters? Where are the light sources? What is the mapping from radiance to pixel color? Want to solve for 3D geometry
 Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Calibration of an Articulated Camera System
 Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Calibration of an Articulated Camera System
 Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Corner-Based Image Alignment using Pyramid Structure with Gradient Vector Similarity
 Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Dynamic wetting property investigation of AFM tips in micro/nanoscale
 Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Outline. Discriminative classifiers for image recognition. Where in the World? A nearest neighbor recognition example 4/14/2011. CS 376 Lecture 22 1
 4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
Vectorization of Image Outlines Using Rational Spline and Genetic Algorithm
 01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
Non-iterative Construction of Super-Resolution Image from an Acoustic Camera Video Sequence
 CIHSPS 005 - IEEE Internatonal Conference on Computatonal Intellgence for Homeland Securty and Personal Safety Orlando, FL, USA, 3 March Aprl 005 Non-teratve Constructon of Super-Resoluton Image from an
CIHSPS 005 - IEEE Internatonal Conference on Computatonal Intellgence for Homeland Securty and Personal Safety Orlando, FL, USA, 3 March Aprl 005 Non-teratve Constructon of Super-Resoluton Image from an
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
TN348: Openlab Module - Colocalization
 TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
A B-Snake Model Using Statistical and Geometric Information - Applications to Medical Images
 A B-Snake Model Usng Statstcal and Geometrc Informaton - Applcatons to Medcal Images Yue Wang, Eam Khwang Teoh and Dnggang Shen 2 School of Electrcal and Electronc Engneerng, Nanyang Technologcal Unversty
A B-Snake Model Usng Statstcal and Geometrc Informaton - Applcatons to Medcal Images Yue Wang, Eam Khwang Teoh and Dnggang Shen 2 School of Electrcal and Electronc Engneerng, Nanyang Technologcal Unversty
Pose Estimation in Heavy Clutter using a Multi-Flash Camera
 2010 IEEE Internatonal Conference on Robotcs and Automaton Anchorage Conventon Dstrct May 3-8, 2010, Anchorage, Alaska, USA Pose Estmaton n Heavy Clutter usng a Mult-Flash Camera Mng-Yu Lu, Oncel Tuzel,
2010 IEEE Internatonal Conference on Robotcs and Automaton Anchorage Conventon Dstrct May 3-8, 2010, Anchorage, Alaska, USA Pose Estmaton n Heavy Clutter usng a Mult-Flash Camera Mng-Yu Lu, Oncel Tuzel,
Calibration of an Articulated Camera System with Scale Factor Estimation
 Calbraton of an Artculated Camera System wth Scale Factor Estmaton CHEN Junzhou, Kn Hong WONG arxv:.47v [cs.cv] 7 Oct Abstract Multple Camera Systems (MCS) have been wdely used n many vson applcatons and
Calbraton of an Artculated Camera System wth Scale Factor Estmaton CHEN Junzhou, Kn Hong WONG arxv:.47v [cs.cv] 7 Oct Abstract Multple Camera Systems (MCS) have been wdely used n many vson applcatons and
A Fast Content-Based Multimedia Retrieval Technique Using Compressed Data
 A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
An Image Fusion Approach Based on Segmentation Region
 Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Calibration Method for 2-Dimensional Laser Scanner Attached on a Robot Vehicle
 Proceedngs of the 17th World Congress The Internatonal Federaton of Automatc Control Seoul, Korea, July 6-11, 8 Calbraton Method for -Dmensonal Laser Scanner Attached on a Robot Vehcle Oscar C. Barawd,
Proceedngs of the 17th World Congress The Internatonal Federaton of Automatc Control Seoul, Korea, July 6-11, 8 Calbraton Method for -Dmensonal Laser Scanner Attached on a Robot Vehcle Oscar C. Barawd,
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Automated Surface Deformations Detection and Marking on Automotive Body Panels
 6th annual IEEE Conference on Automaton Scence and Engneerng Marrott Eaton Centre Hotel Toronto, Ontaro, Canada, August 21-24, 2010 MoB5.1 Automated Surface Deformatons Detecton and Markng on Automotve
6th annual IEEE Conference on Automaton Scence and Engneerng Marrott Eaton Centre Hotel Toronto, Ontaro, Canada, August 21-24, 2010 MoB5.1 Automated Surface Deformatons Detecton and Markng on Automotve
Feature-Area Optimization: A Novel SAR Image Registration Method
 Feature-Area Optmzaton: A Novel SAR Image Regstraton Method Fuqang Lu, Fukun B, Lang Chen, Hao Sh and We Lu Abstract Ths letter proposes a synthetc aperture radar (SAR) mage regstraton method named Feature-Area
Feature-Area Optmzaton: A Novel SAR Image Regstraton Method Fuqang Lu, Fukun B, Lang Chen, Hao Sh and We Lu Abstract Ths letter proposes a synthetc aperture radar (SAR) mage regstraton method named Feature-Area
FLane: An Adaptive Fuzzy Logic Lane Tracking System for Driver Assistance
 Gulo Rena 1 Department of Engneerng for Innovaton, Unversty of Salento, Va per Arnesano, 73100 Lecce, Italy e-mal: gulo.rena@unsalento.t Annalsa Mlella Insttute of Intellgent Systems for Automaton, Natonal
Gulo Rena 1 Department of Engneerng for Innovaton, Unversty of Salento, Va per Arnesano, 73100 Lecce, Italy e-mal: gulo.rena@unsalento.t Annalsa Mlella Insttute of Intellgent Systems for Automaton, Natonal
Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video
 01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
Alignment of Non-Overlapping Sequences
 Algnment of Non-Overlappng Sequences Yaron Casp Mchal ran Dept. of Computer Scence and Appled Math The Wezmann nsttute of Scence 76100 Rehovot, srael Ths paper shows how two mage sequences that have no
Algnment of Non-Overlappng Sequences Yaron Casp Mchal ran Dept. of Computer Scence and Appled Math The Wezmann nsttute of Scence 76100 Rehovot, srael Ths paper shows how two mage sequences that have no
arxiv: v1 [cs.ro] 8 Jul 2016
![arxiv: v1 [cs.ro] 8 Jul 2016](/thumbs/95/122994620.jpg "arxiv: v1 [cs.ro] 8 Jul 2016") Non-Central Catadoptrc Cameras Pose Estmaton usng 3D Lnes* André Mateus, Pedro Mraldo and Pedro U. Lma arxv:1607.02290v1 [cs.ro] 8 Jul 2016 Abstract In ths artcle we purpose a novel method for planar pose
Non-Central Catadoptrc Cameras Pose Estmaton usng 3D Lnes* André Mateus, Pedro Mraldo and Pedro U. Lma arxv:1607.02290v1 [cs.ro] 8 Jul 2016 Abstract In ths artcle we purpose a novel method for planar pose
APPLICATION OF AN AUGMENTED REALITY SYSTEM FOR DISASTER RELIEF
 APPLICATION OF AN AUGMENTED REALITY SYSTEM FOR DISASTER RELIEF Johannes Leebmann Insttute of Photogrammetry and Remote Sensng, Unversty of Karlsruhe (TH, Englerstrasse 7, 7618 Karlsruhe, Germany - leebmann@pf.un-karlsruhe.de
APPLICATION OF AN AUGMENTED REALITY SYSTEM FOR DISASTER RELIEF Johannes Leebmann Insttute of Photogrammetry and Remote Sensng, Unversty of Karlsruhe (TH, Englerstrasse 7, 7618 Karlsruhe, Germany - leebmann@pf.un-karlsruhe.de
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
Feature-based image registration using the shape context
 Feature-based mage regstraton usng the shape context LEI HUANG *, ZHEN LI Center for Earth Observaton and Dgtal Earth, Chnese Academy of Scences, Bejng, 100012, Chna Graduate Unversty of Chnese Academy
Feature-based mage regstraton usng the shape context LEI HUANG *, ZHEN LI Center for Earth Observaton and Dgtal Earth, Chnese Academy of Scences, Bejng, 100012, Chna Graduate Unversty of Chnese Academy
Contours Planning and Visual Servo Control of XXY Positioning System Using NURBS Interpolation Approach
 Inventon Journal of Research Technology n Engneerng & Management (IJRTEM) ISSN: 2455-3689 www.jrtem.com olume 1 Issue 4 ǁ June. 2016 ǁ PP 16-23 Contours Plannng and sual Servo Control of XXY Postonng System
Inventon Journal of Research Technology n Engneerng & Management (IJRTEM) ISSN: 2455-3689 www.jrtem.com olume 1 Issue 4 ǁ June. 2016 ǁ PP 16-23 Contours Plannng and sual Servo Control of XXY Postonng System
Image Alignment CSC 767
 Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Discriminative Dictionary Learning with Pairwise Constraints
 Dscrmnatve Dctonary Learnng wth Parwse Constrants Humn Guo Zhuoln Jang LARRY S. DAVIS UNIVERSITY OF MARYLAND Nov. 6 th, Outlne Introducton/motvaton Dctonary Learnng Dscrmnatve Dctonary Learnng wth Parwse
Dscrmnatve Dctonary Learnng wth Parwse Constrants Humn Guo Zhuoln Jang LARRY S. DAVIS UNIVERSITY OF MARYLAND Nov. 6 th, Outlne Introducton/motvaton Dctonary Learnng Dscrmnatve Dctonary Learnng wth Parwse
Video Object Tracking Based On Extended Active Shape Models With Color Information
 CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
SVO: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
 1 : Sem-Drect Vsual Odometry for Monocular and Mult-Camera Systems Chrstan Forster, Zchao Zhang, Mchael Gassner, Manuel Werlberger, Davde Scaramuzza Abstract Drect methods for Vsual Odometry (VO) have
1 : Sem-Drect Vsual Odometry for Monocular and Mult-Camera Systems Chrstan Forster, Zchao Zhang, Mchael Gassner, Manuel Werlberger, Davde Scaramuzza Abstract Drect methods for Vsual Odometry (VO) have
Shape Representation Robust to the Sketching Order Using Distance Map and Direction Histogram
 Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Real-time Joint Tracking of a Hand Manipulating an Object from RGB-D Input
 Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
IMPLEMENTATION OF 3D SHAPE RECONSTRUCTION FROM RANGE IMAGES FOR OBJECT DIGITAL MODELING
 IMPLEMENTATION OF 3D SHAPE RECONSTRUCTION FROM RANGE IMAGES FOR OBJECT DIGITAL MODELING Landecr A. Albuquerque Automaton and Control Group (GRACO), Department of Mechancal Engneerng, Faculty of Technology,
IMPLEMENTATION OF 3D SHAPE RECONSTRUCTION FROM RANGE IMAGES FOR OBJECT DIGITAL MODELING Landecr A. Albuquerque Automaton and Control Group (GRACO), Department of Mechancal Engneerng, Faculty of Technology,
Data fusion in multi sensor platforms for widearea
 1 Data fuson n mult sensor platforms for wdearea percepton Ars Polychronopoulos, Member IEEE, Nkos Floudas, Angelos Amdts, Member IEEE, Drk Bank, Bas van den Broek Abstract there s a strong belef that
1 Data fuson n mult sensor platforms for wdearea percepton Ars Polychronopoulos, Member IEEE, Nkos Floudas, Angelos Amdts, Member IEEE, Drk Bank, Bas van den Broek Abstract there s a strong belef that
Planar Catadioptric Stereo: Multiple-View Geometry and Image-Based Camera Localization
 Manuscrpt Marottn et al., Spec. Issue Vs. Serv. Clck here to vew lnked References Planar Catadoptrc Stereo: Multple-Vew Geometry and Image-Based Camera Localzaton Gan Luca Marottn a,stefano Schegg b,fabo
Manuscrpt Marottn et al., Spec. Issue Vs. Serv. Clck here to vew lnked References Planar Catadoptrc Stereo: Multple-Vew Geometry and Image-Based Camera Localzaton Gan Luca Marottn a,stefano Schegg b,fabo
Ecient Computation of the Most Probable Motion from Fuzzy. Moshe Ben-Ezra Shmuel Peleg Michael Werman. The Hebrew University of Jerusalem
 Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles
 Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd H. hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd H. hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Image Representation & Visualization Basic Imaging Algorithms Shape Representation and Analysis. outline
 mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
PRÉSENTATIONS DE PROJETS
 PRÉSENTATIONS DE PROJETS Rex Onlne (V. Atanasu) What s Rex? Rex s an onlne browser for collectons of wrtten documents [1]. Asde ths core functon t has however many other applcatons that make t nterestng
PRÉSENTATIONS DE PROJETS Rex Onlne (V. Atanasu) What s Rex? Rex s an onlne browser for collectons of wrtten documents [1]. Asde ths core functon t has however many other applcatons that make t nterestng
Semi-Direct Visual Odometry for Monocular, Wide-angle, and Multi-Camera Systems
 1 Sem-Drect Vsual Odometry for Monocular, Wde-angle, and Mult-Camera Systems Chrstan Forster, Zchao Zhang, Mchael Gassner, Manuel Werlberger, Davde Scaramuzza Abstract Drect methods for Vsual Odometry
1 Sem-Drect Vsual Odometry for Monocular, Wde-angle, and Mult-Camera Systems Chrstan Forster, Zchao Zhang, Mchael Gassner, Manuel Werlberger, Davde Scaramuzza Abstract Drect methods for Vsual Odometry
Image-based Motion Stabilization for Maritime Surveillance
 Image-based Moton Stablzaton for Martme Survellance Danel D. Morrs, Bran R. Colonna and Franln D. Snyder General Dynamcs Robotc Systems, 151 Ardmore Blvd, Pttsburgh, PA 15221 * ABSTRACT Robust mage-based
Image-based Moton Stablzaton for Martme Survellance Danel D. Morrs, Bran R. Colonna and Franln D. Snyder General Dynamcs Robotc Systems, 151 Ardmore Blvd, Pttsburgh, PA 15221 * ABSTRACT Robust mage-based
Large Motion Estimation for Omnidirectional Vision
 Large Moton Estmaton for Omndrectonal Vson Jong Weon Lee, Suya You, and Ulrch Neumann Computer Scence Department Integrated Meda Systems Center Unversty of Southern Calforna Los Angeles, CA 98978, USA
Large Moton Estmaton for Omndrectonal Vson Jong Weon Lee, Suya You, and Ulrch Neumann Computer Scence Department Integrated Meda Systems Center Unversty of Southern Calforna Los Angeles, CA 98978, USA
Radial Basis Functions
 Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Implementation of a Dynamic Image-Based Rendering System
 Implementaton of a Dynamc Image-Based Renderng System Nklas Bakos, Claes Järvman and Mark Ollla 3 Norrköpng Vsualzaton and Interacton Studo Lnköpng Unversty Abstract Work n dynamc mage based renderng has
Implementaton of a Dynamc Image-Based Renderng System Nklas Bakos, Claes Järvman and Mark Ollla 3 Norrköpng Vsualzaton and Interacton Studo Lnköpng Unversty Abstract Work n dynamc mage based renderng has
Image Fusion With a Dental Panoramic X-ray Image and Face Image Acquired With a KINECT
 Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
Robotics and Autonomous Systems. Large scale multiple robot visual mapping with heterogeneous landmarks in semi-structured terrain
 Robotcs and Autonomous Systems 59 () 654 674 Contents lsts avalable at ScenceDrect Robotcs and Autonomous Systems journal homepage: www.elsever.com/locate/robot Large scale multple robot vsual mappng wth
Robotcs and Autonomous Systems 59 () 654 674 Contents lsts avalable at ScenceDrect Robotcs and Autonomous Systems journal homepage: www.elsever.com/locate/robot Large scale multple robot vsual mappng wth
SVO: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
 Zurch Open Repostory and Archve Unversty of Zurch Man Lbrary Strckhofstrasse 39 CH-8057 Zurch www.zora.uzh.ch Year: 2016 : Sem-Drect Vsual Odometry for Monocular and Mult-Camera Systems Forster, Chrstan;
Zurch Open Repostory and Archve Unversty of Zurch Man Lbrary Strckhofstrasse 39 CH-8057 Zurch www.zora.uzh.ch Year: 2016 : Sem-Drect Vsual Odometry for Monocular and Mult-Camera Systems Forster, Chrstan;
Resolving Ambiguity in Depth Extraction for Motion Capture using Genetic Algorithm
 Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
Novel Fuzzy logic Based Edge Detection Technique
 Novel Fuzzy logc Based Edge Detecton Technque Aborsade, D.O Department of Electroncs Engneerng, adoke Akntola Unversty of Tech., Ogbomoso. Oyo-state. doaborsade@yahoo.com Abstract Ths paper s based on
Novel Fuzzy logc Based Edge Detecton Technque Aborsade, D.O Department of Electroncs Engneerng, adoke Akntola Unversty of Tech., Ogbomoso. Oyo-state. doaborsade@yahoo.com Abstract Ths paper s based on
The Research of Ellipse Parameter Fitting Algorithm of Ultrasonic Imaging Logging in the Casing Hole
 Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
Real time depth mapping performed on an autonomous stereo vision module
 1 Real tme depth mappng performed on an autonomous stereo vson module Jeroen Smt 1, Rchard Klehorst 2, Anteneh Abbo 2, Jan Meuleman 1 and Gerard van Wllgenburg 1 1 Wagenngen Unversty, Bornsesteeg 59, 6708
1 Real tme depth mappng performed on an autonomous stereo vson module Jeroen Smt 1, Rchard Klehorst 2, Anteneh Abbo 2, Jan Meuleman 1 and Gerard van Wllgenburg 1 1 Wagenngen Unversty, Bornsesteeg 59, 6708
Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles
 Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd Hyunchul hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd Hyunchul hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Incremental Real-Time Multibody VSLAM with Trajectory Optimization Using Stereo Camera
 2016 IEEE/RSJ Internatonal Conference on Intellgent Robots and Systems (IROS) Daejeon Conventon Center October 9-14, 2016, Daejeon, Korea Incremental Real-Tme Multbody VSLAM wth Trajectory Optmzaton Usng
2016 IEEE/RSJ Internatonal Conference on Intellgent Robots and Systems (IROS) Daejeon Conventon Center October 9-14, 2016, Daejeon, Korea Incremental Real-Tme Multbody VSLAM wth Trajectory Optmzaton Usng
Environmental Mapping by Trinocular Vision for Self-Localization Using Monocular Vision
 OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
Combining complementary edge, point and color cues in model-based tracking for highly dynamic scenes
 Combnng complementary edge, pont and color cues n model-based trackng for hghly dynamc scenes Antone Pett, Erc Marchand, Keyvan Kanan Abstract Ths paper focuses on the ssue of estmatng the complete 3D
Combnng complementary edge, pont and color cues n model-based trackng for hghly dynamc scenes Antone Pett, Erc Marchand, Keyvan Kanan Abstract Ths paper focuses on the ssue of estmatng the complete 3D
Planar Pose Estimation using a Camera and Single-Station Ranging Measurements
 Planar Pose Estmaton usng a Camera and Sngle-Staton Rangng Measurements Chen Zhu 1, Gabrele Gorg 1, and Chrstoph Günther 1,2 1 Insttute for Communcatons and Navgaton, Department of Electrcal and Computer
Planar Pose Estmaton usng a Camera and Sngle-Staton Rangng Measurements Chen Zhu 1, Gabrele Gorg 1, and Chrstoph Günther 1,2 1 Insttute for Communcatons and Navgaton, Department of Electrcal and Computer
Direct Monocular Odometry Using Points and Lines
 Drect Monocular Odometry Usng Ponts and Lnes Shchao Yang, Sebastan Scherer Abstract Most vsual odometry algorthm for a monocular camera focuses on ponts, ether by feature matchng, or drect algnment of
Drect Monocular Odometry Usng Ponts and Lnes Shchao Yang, Sebastan Scherer Abstract Most vsual odometry algorthm for a monocular camera focuses on ponts, ether by feature matchng, or drect algnment of
Online codebook modeling based background subtraction with a moving camera
 Onlne codebook modelng based background subtracton wth a movng camera Lyun Gong School of Computer Scence Unversty of Lncoln, UK Emal: lgong@lncoln.ac.uk Mao Yu School of Computer Scence Unversty of Lncoln,
Onlne codebook modelng based background subtracton wth a movng camera Lyun Gong School of Computer Scence Unversty of Lncoln, UK Emal: lgong@lncoln.ac.uk Mao Yu School of Computer Scence Unversty of Lncoln,
SDF Tracker: A Parallel Algorithm for On-line Pose Estimation and Scene Reconstruction From Depth Images
 SDF Tracker: A Parallel Algorthm for On-lne Pose Estmaton and Scene Reconstructon From Depth Images Danel R. Canelhas, Todor Stoyanov, Achm J. Llenthal Center of Appled Autonomous Sensor Systems (AASS),
SDF Tracker: A Parallel Algorthm for On-lne Pose Estmaton and Scene Reconstructon From Depth Images Danel R. Canelhas, Todor Stoyanov, Achm J. Llenthal Center of Appled Autonomous Sensor Systems (AASS),
Conditional Speculative Decimal Addition*
 Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH
 IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
A Comparison and Evaluation of Three Different Pose Estimation Algorithms In Detecting Low Texture Manufactured Objects
 Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Mobile Robot Localization and Mapping by Scan Matching using Laser Reflection Intensity of the SOKUIKI Sensor
 Moble Robot Localzaton and Mappng by Scan Matchng usng Reflecton Intensty of the SOKUIKI Sensor *HARA Yoshtaka, KAWATA Hrohko, OHYA Akhsa, YUTA Shn ch Intellgent Robot Laboratory Unversty of Tsukuba 1-1-1,
Moble Robot Localzaton and Mappng by Scan Matchng usng Reflecton Intensty of the SOKUIKI Sensor *HARA Yoshtaka, KAWATA Hrohko, OHYA Akhsa, YUTA Shn ch Intellgent Robot Laboratory Unversty of Tsukuba 1-1-1,
Image-based Localization in Urban Environments
 Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Vanishing Hull. Jinhui Hu, Suya You, Ulrich Neumann University of Southern California {jinhuihu,suyay,
 Vanshng Hull Jnhu Hu Suya You Ulrch Neumann Unversty of Southern Calforna {jnhuhusuyay uneumann}@graphcs.usc.edu Abstract Vanshng ponts are valuable n many vson tasks such as orentaton estmaton pose recovery
Vanshng Hull Jnhu Hu Suya You Ulrch Neumann Unversty of Southern Calforna {jnhuhusuyay uneumann}@graphcs.usc.edu Abstract Vanshng ponts are valuable n many vson tasks such as orentaton estmaton pose recovery
3D Modeling Using Multi-View Images. Jinjin Li. A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science
 3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
3D model-based tracking for UAV indoor localisation
 3D model-based tracng for UAV ndoor localsaton Célne Teulère, Erc Marchand, Laurent Ec Abstract Ths paper proposes a novel model-based tracng approach for 3D localsaton. One man dffculty of standard model-based
3D model-based tracng for UAV ndoor localsaton Célne Teulère, Erc Marchand, Laurent Ec Abstract Ths paper proposes a novel model-based tracng approach for 3D localsaton. One man dffculty of standard model-based
Modeling, Manipulating, and Visualizing Continuous Volumetric Data: A Novel Spline-based Approach
 Modelng, Manpulatng, and Vsualzng Contnuous Volumetrc Data: A Novel Splne-based Approach Jng Hua Center for Vsual Computng, Department of Computer Scence SUNY at Stony Brook Talk Outlne Introducton and
Modelng, Manpulatng, and Vsualzng Contnuous Volumetrc Data: A Novel Splne-based Approach Jng Hua Center for Vsual Computng, Department of Computer Scence SUNY at Stony Brook Talk Outlne Introducton and
Skew Angle Estimation and Correction of Hand Written, Textual and Large areas of Non-Textual Document Images: A Novel Approach
 Angle Estmaton and Correcton of Hand Wrtten, Textual and Large areas of Non-Textual Document Images: A Novel Approach D.R.Ramesh Babu Pyush M Kumat Mahesh D Dhannawat PES Insttute of Technology Research
Angle Estmaton and Correcton of Hand Wrtten, Textual and Large areas of Non-Textual Document Images: A Novel Approach D.R.Ramesh Babu Pyush M Kumat Mahesh D Dhannawat PES Insttute of Technology Research
Collaborative Tracking of Objects in EPTZ Cameras
 Collaboratve Trackng of Objects n EPTZ Cameras Fasal Bashr and Fath Porkl * Mtsubsh Electrc Research Laboratores, Cambrdge, MA, USA ABSTRACT Ths paper addresses the ssue of mult-source collaboratve object
Collaboratve Trackng of Objects n EPTZ Cameras Fasal Bashr and Fath Porkl * Mtsubsh Electrc Research Laboratores, Cambrdge, MA, USA ABSTRACT Ths paper addresses the ssue of mult-source collaboratve object
MOTION BLUR ESTIMATION AT CORNERS
 Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
12. Segmentation. Computer Engineering, i Sejong University. Dongil Han
 Computer Vson 1. Segmentaton Computer Engneerng, Sejong Unversty Dongl Han Image Segmentaton t Image segmentaton Subdvdes an mage nto ts consttuent regons or objects - After an mage has been segmented,
Computer Vson 1. Segmentaton Computer Engneerng, Sejong Unversty Dongl Han Image Segmentaton t Image segmentaton Subdvdes an mage nto ts consttuent regons or objects - After an mage has been segmented,
DETECTION OF MOVING OBJECT BY FUSION OF COLOR AND DEPTH INFORMATION
 INTERNATIONAL JOURNAL ON SMART SENSING AN INTELLIGENT SYSTEMS VOL. 9, NO., MARCH 206 ETECTION OF MOVING OBJECT BY FUSION OF COLOR AN EPTH INFORMATION T. T. Zhang,G. P. Zhao and L. J. Lu School of Automaton
INTERNATIONAL JOURNAL ON SMART SENSING AN INTELLIGENT SYSTEMS VOL. 9, NO., MARCH 206 ETECTION OF MOVING OBJECT BY FUSION OF COLOR AN EPTH INFORMATION T. T. Zhang,G. P. Zhao and L. J. Lu School of Automaton
Detecting and Dealing with Hovering Maneuvers in Vision-aided Inertial Navigation Systems
 Detectng and Dealng wth Hoverng Maneuvers n Vson-aded Inertal Navgaton Systems Dmtros Kottas, Kejan J Wu, and Stergos I Roumelots Abstract In ths paper, we study the problem of hoverng (e, absence of translatonal
Detectng and Dealng wth Hoverng Maneuvers n Vson-aded Inertal Navgaton Systems Dmtros Kottas, Kejan J Wu, and Stergos I Roumelots Abstract In ths paper, we study the problem of hoverng (e, absence of translatonal
A robust model-based tracker combining geometrical and color edge information
 213 IEEE/RSJ Internatonal Conference on Intellgent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan A robust model-based tracker combnng geometrcal and color edge nformaton Antone Pett, Erc Marchand,
213 IEEE/RSJ Internatonal Conference on Intellgent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan A robust model-based tracker combnng geometrcal and color edge nformaton Antone Pett, Erc Marchand,
A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX
 A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX A. Almhde, C. Léger, M. Derche 2 and R. Lédée Laboratory of Electroncs, Sgnals and Images (LESI),
A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX A. Almhde, C. Léger, M. Derche 2 and R. Lédée Laboratory of Electroncs, Sgnals and Images (LESI),
Object Contour Tracking Using Multi-feature Fusion based Particle Filter
 Object Contour Tracng Usng Mult-feature Fuson based Partcle Flter Xaofeng Lu 1,3, L Song 1,2, Songyu Yu 1, Nam Lng 2 Insttute of Image Communcaton and Informaton Processng 1 Shangha Jao Tong Unversty,
Object Contour Tracng Usng Mult-feature Fuson based Partcle Flter Xaofeng Lu 1,3, L Song 1,2, Songyu Yu 1, Nam Lng 2 Insttute of Image Communcaton and Informaton Processng 1 Shangha Jao Tong Unversty,
Articulated Motion Capture from Visual Hulls in High Dimensional Configuration Spaces
 Semnar Presentaton June 18th, 010 Artculated Moton Capture from Vsual Hulls n Hgh Dmensonal Confguraton Spaces Azawa Yamasak Lab D, 48-09741, 羅衛蘭 ABSTRACT In ths paper, we propose a novel approach for
Semnar Presentaton June 18th, 010 Artculated Moton Capture from Vsual Hulls n Hgh Dmensonal Confguraton Spaces Azawa Yamasak Lab D, 48-09741, 羅衛蘭 ABSTRACT In ths paper, we propose a novel approach for
Learning a Class-Specific Dictionary for Facial Expression Recognition
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 4 Sofa 016 Prnt ISSN: 1311-970; Onlne ISSN: 1314-4081 DOI: 10.1515/cat-016-0067 Learnng a Class-Specfc Dctonary for
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 4 Sofa 016 Prnt ISSN: 1311-970; Onlne ISSN: 1314-4081 DOI: 10.1515/cat-016-0067 Learnng a Class-Specfc Dctonary for
Problem Definitions and Evaluation Criteria for Computational Expensive Optimization
 Problem efntons and Evaluaton Crtera for Computatonal Expensve Optmzaton B. Lu 1, Q. Chen and Q. Zhang 3, J. J. Lang 4, P. N. Suganthan, B. Y. Qu 6 1 epartment of Computng, Glyndwr Unversty, UK Faclty
Problem efntons and Evaluaton Crtera for Computatonal Expensve Optmzaton B. Lu 1, Q. Chen and Q. Zhang 3, J. J. Lang 4, P. N. Suganthan, B. Y. Qu 6 1 epartment of Computng, Glyndwr Unversty, UK Faclty
Title: A Novel Protocol for Accuracy Assessment in Classification of Very High Resolution Images
 2009 IEEE. Personal use of ths materal s permtted. Permsson from IEEE must be obtaned for all other uses, n any current or future meda, ncludng reprntng/republshng ths materal for advertsng or promotonal
2009 IEEE. Personal use of ths materal s permtted. Permsson from IEEE must be obtaned for all other uses, n any current or future meda, ncludng reprntng/republshng ths materal for advertsng or promotonal
EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS
 P.G. Demdov Yaroslavl State Unversty Anatoly Ntn, Vladmr Khryashchev, Olga Stepanova, Igor Kostern EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS Yaroslavl, 2015 Eye
P.G. Demdov Yaroslavl State Unversty Anatoly Ntn, Vladmr Khryashchev, Olga Stepanova, Igor Kostern EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS Yaroslavl, 2015 Eye
Computing depth maps from descent images
 Machne Vson and Applcatons (005) Dgtal Object Identfer (DOI) 0.007/s0038-004-060-7 Machne Vson and Applcatons Computng depth maps from descent mages Yaln Xong, Clark F. Olson, Larry H. Matthes 3 KLA-Tencor,
Machne Vson and Applcatons (005) Dgtal Object Identfer (DOI) 0.007/s0038-004-060-7 Machne Vson and Applcatons Computng depth maps from descent mages Yaln Xong, Clark F. Olson, Larry H. Matthes 3 KLA-Tencor,
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Coding Artifact Reduction Using Edge Map Guided Adaptive and Fuzzy Filter
 MEL A MITSUBISHI ELECTIC ESEACH LABOATOY http://www.merl.com Codng Artfact educton Usng Edge Map Guded Adaptve and Fuzzy Flter Hao-Song Kong Yao Ne Anthony Vetro Hufang Sun Kenneth E. Barner T-2004-056
MEL A MITSUBISHI ELECTIC ESEACH LABOATOY http://www.merl.com Codng Artfact educton Usng Edge Map Guded Adaptve and Fuzzy Flter Hao-Song Kong Yao Ne Anthony Vetro Hufang Sun Kenneth E. Barner T-2004-056
Scale Selective Extended Local Binary Pattern For Texture Classification
 Scale Selectve Extended Local Bnary Pattern For Texture Classfcaton Yutng Hu, Zhlng Long, and Ghassan AlRegb Multmeda & Sensors Lab (MSL) Georga Insttute of Technology 03/09/017 Outlne Texture Representaton
Scale Selectve Extended Local Bnary Pattern For Texture Classfcaton Yutng Hu, Zhlng Long, and Ghassan AlRegb Multmeda & Sensors Lab (MSL) Georga Insttute of Technology 03/09/017 Outlne Texture Representaton
Prof. Feng Liu. Spring /24/2017
 Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
New dynamic zoom calibration technique for a stereo-vision based multi-view 3D modeling system
 New dynamc oom calbraton technque for a stereo-vson based mult-vew 3D modelng system Tao Xan, Soon-Yong Park, Mural Subbarao Dept. of Electrcal & Computer Engneerng * State Unv. of New York at Stony Brook,
New dynamc oom calbraton technque for a stereo-vson based mult-vew 3D modelng system Tao Xan, Soon-Yong Park, Mural Subbarao Dept. of Electrcal & Computer Engneerng * State Unv. of New York at Stony Brook,
Accounting for the Use of Different Length Scale Factors in x, y and z Directions
 1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
Reconstruction of Rigid Body Models from Motion Distorted Laser Range Data Using Optical Flow
 Reconstructon of Rgd Body Models from Moton Dstorted Laser Range Data Usng Optcal Flow Eddy Ilg Raner Kümmerle Wolfram Burgard Thomas Brox Abstract The setup of tltng a 2D laser range fnder up and down
Reconstructon of Rgd Body Models from Moton Dstorted Laser Range Data Usng Optcal Flow Eddy Ilg Raner Kümmerle Wolfram Burgard Thomas Brox Abstract The setup of tltng a 2D laser range fnder up and down
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
Available online at ScienceDirect. Procedia Environmental Sciences 26 (2015 )
") Avalable onlne at www.scencedrect.com ScenceDrect Proceda Envronmental Scences 26 (2015 ) 109 114 Spatal Statstcs 2015: Emergng Patterns Calbratng a Geographcally Weghted Regresson Model wth Parameter-Specfc
Avalable onlne at www.scencedrect.com ScenceDrect Proceda Envronmental Scences 26 (2015 ) 109 114 Spatal Statstcs 2015: Emergng Patterns Calbratng a Geographcally Weghted Regresson Model wth Parameter-Specfc