Recap of Previous Lecture
|
|
|
- Madison Pearson
- 5 years ago
- Views:
Transcription
1 Recap of Previous Lecture Matting foreground from background Using a single known background (and a constrained foreground) Using two known backgrounds Using lots of backgrounds to capture reflection and refraction Separating direct illumination and global illumination using structured lighting
2 Next lectures on HDR (1) Recovering high dynamic range images (2) Rendering high dynamic range back to displayable low dynamic range (tone mapping)

3 High Dynamic Range Images slides from Alexei A. Efros and Paul Debevec cs129: Computational Photography James Hays, Brown, Fall 2012





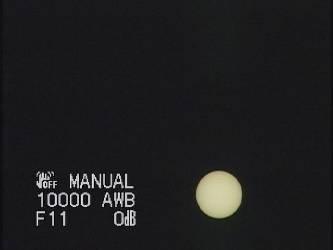


4 Problem: Dynamic Range The real world is high dynamic range. 25, ,000 2,000,000,000
5 Long Exposure Real world 10-6 High dynamic range 10 6 Picture to 255
6 Short Exposure Real world 10-6 High dynamic range 10 6 Picture to 255

 = 42")

7 Image pixel (312, 284) = photons?

8 Camera Calibration Geometric How pixel coordinates relate to directions in the world Photometric How pixel values relate to radiance amounts in the world
9 Camera Calibration Geometric How pixel coordinates relate to directions in the world in other images. Photometric How pixel values relate to radiance amounts in the world in other images.


 CCD sensor")


10 The Image Acquisition Pipeline Lens Shutter scene radiance 2 (W/sr/m ) CCD sensor irradiance 2 (W/m ) t ADC sensor exposure Remapping analog voltages digital values Raw Image pixel values JPEG Image

 (CCD")
11 Imaging system response function 255 Pixel value 0 log Exposure = log (Radiance * t) (CCD photon count)
12 Varying Exposure

13 Camera is not a photometer! Limited dynamic range Perhaps use multiple exposures? Unknown, nonlinear response Not possible to convert pixel values to radiance Solution: Recover response curve from multiple exposures, then reconstruct the radiance map




14 Recovering High Dynamic Range Radiance Maps from Photographs Paul Debevec Jitendra Malik Computer Science Division University of California at Berkeley August 1997

 F/stop")
 Neutral")
15 Ways to vary exposure Shutter Speed (*) F/stop (aperture, iris) Neutral Density (ND) Filters


16 Shutter Speed Ranges: Canon D30: 30 to 1/4,000 sec. Sony VX2000: ¼ to 1/10,000 sec. Pros: Directly varies the exposure Usually accurate and repeatable Issues: Noise in long exposures

17 Shutter Speed Note: shutter times usually obey a power series each stop is a factor of 2 ¼, 1/8, 1/15, 1/30, 1/60, 1/125, 1/250, 1/500, 1/1000 sec Usually really is: ¼, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256, 1/512, 1/1024 sec
 Exposure = Radiance t log Exposure = log Radiance log t 3 1 2 t = 4")
18 The Algorithm Image series t = 1/64 sec t = 1/16 sec t = 1/4 sec t = 1 sec Pixel Value Z = f(exposure) Exposure = Radiance t log Exposure = log Radiance log t t = 4 sec
19 Pixel value The Algorithm t = 1/64 sec Image series t = 1/16 sec t = 1/4 sec Pixel Value Z = f(exposure) Exposure = Radiance t log Exposure = log Radiance t = 1 sec log t t = 4 sec Assuming unit radiance for each pixel ln Exposure




20 Pixel value Pixel value Response Curve Assuming unit radiance for each pixel After adjusting radiances to obtain a smooth response curve ln Exposure ln Exposure

 2 Z max g (z) 2 i 1 j 1 z Z min fitting term smoothness")
21 The Math Let g(z) be the discrete inverse response function For each pixel site i in each image j, want: ln Radiance i ln t j g(z ij ) Solve the overdetermined linear system: N P ln Radiance i ln t j g(z ij ) 2 Z max g (z) 2 i 1 j 1 z Z min fitting term smoothness term
![Matlab Code function [g,le]=gsolve(z,b,l,w) n = 256; A = zeros(size(z,1)*size(z,2)+n+1,n+size(z,1)); b = zeros(size(a,1),1); k = 1; %% Include the data-fitting equations for i=1:size(z,1) for](/docs-images/82/85146857/images/22-1.jpg "j=1:size(z,2) wij = w(z(i,j)+1); A(k,Z(i,j)+1) = wij; A(k,n+i) = -wij; b(k,1) = wij * B(i,j); k=k+1; end end A(k,129) = 1; %% Fix the curve by setting its middle value to 0 k=k+1; for i=1:n-2 %%")
22 Matlab Code function [g,le]=gsolve(z,b,l,w) n = 256; A = zeros(size(z,1)*size(z,2)+n+1,n+size(z,1)); b = zeros(size(a,1),1); k = 1; %% Include the data-fitting equations for i=1:size(z,1) for j=1:size(z,2) wij = w(z(i,j)+1); A(k,Z(i,j)+1) = wij; A(k,n+i) = -wij; b(k,1) = wij * B(i,j); k=k+1; end end A(k,129) = 1; %% Fix the curve by setting its middle value to 0 k=k+1; for i=1:n-2 %% Include the smoothness equations A(k,i)=l*w(i+1); A(k,i+1)=-2*l*w(i+1); A(k,i+2)=l*w(i+1); k=k+1; end x = A\b; %% Solve the system using SVD g = x(1:n); le = x(n+1:size(x,1));


23 Pixel value Results: Digital Camera Kodak DCS460 1/30 to 30 sec Recovered response curve log Exposure

24 Reconstructed radiance map
25 Results: Color Film Kodak Gold ASA 100, PhotoCD

26 Recovered Response Curves Red Green Blue RGB

27 The Radiance Map
28 How do we store this?
29 Portable FloatMap (.pfm) 12 bytes per pixel, 4 for each channel sign exponent mantissa Text header similar to Jeff Poskanzer s.ppm image format: Floating Point TIFF similar PF <binary image data>
 32 bits / pixel Red Green Blue Exponent (145,")
 (145, 215, 87, 103) = (145,")
 Ward, Greg.")
30 Radiance Format (.pic,.hdr) 32 bits / pixel Red Green Blue Exponent (145, 215, 87, 149) = (145, 215, 87) * 2^( ) = ( , , ) (145, 215, 87, 103) = (145, 215, 87) * 2^( ) = ( , , ) Ward, Greg. "Real Pixels," in Graphics Gems IV, edited by James Arvo, Academic Press, 1994
31 ILM s OpenEXR (.exr) 6 bytes per pixel, 2 for each channel, compressed sign exponent mantissa Several lossless compression options, 2:1 typical Compatible with the half datatype in NVidia's Cg Supported natively on GeForce FX and Quadro FX Available at
32 Now What?

33 Tone Mapping How can we do this? Real World Ray Traced World (Radiance) Linear scaling?, thresholding? Suggestions? 10-6 High dynamic range 10 6 Display/ Printer to 255

34 The Radiance Map Linearly scaled to display device

35 Simple Global Operator Compression curve needs to Bring everything within range Leave dark areas alone In other words Asymptote at 255 Derivative of 1 at 0
36 Global Operator (Reinhart et al) L display 1 L world L world


37 Global Operator Results



38 Reinhart Operator Darkest 0.1% scaled to display device

39 What do we see? Vs.
40 Issues with multi-exposure HDR Scene and camera need to be static Camera sensors are getting better and better Display devices are fairly limited anyway (although getting better).

41 What about local tone mapping? What about avoiding radiance map reconstruction entirely?
High Dynamic Range Images
 High Dynamic Range Images Alyosha Efros with a lot of slides stolen from Paul Debevec and Yuanzhen Li, 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Grandma Problem Problem: Dynamic
High Dynamic Range Images Alyosha Efros with a lot of slides stolen from Paul Debevec and Yuanzhen Li, 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Grandma Problem Problem: Dynamic
High Dynamic Range Images
 High Dynamic Range Images Alyosha Efros CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 with a lot of slides stolen from Paul Debevec Why HDR? Problem: Dynamic
High Dynamic Range Images Alyosha Efros CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 with a lot of slides stolen from Paul Debevec Why HDR? Problem: Dynamic
Image-based Lighting (Part 2)
") Image-based Lighting (Part 2) 10/19/17 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros, Kevin Karsch Today Brief review of last class Show how
Image-based Lighting (Part 2) 10/19/17 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros, Kevin Karsch Today Brief review of last class Show how
High dynamic range imaging
 High dynamic range imaging Digital Visual Effects Yung-Yu Chuang with slides by Fredo Durand, Brian Curless, Steve Seitz, Paul Debevec and Alexei Efros Camera is an imperfect device Camera is an imperfect
High dynamic range imaging Digital Visual Effects Yung-Yu Chuang with slides by Fredo Durand, Brian Curless, Steve Seitz, Paul Debevec and Alexei Efros Camera is an imperfect device Camera is an imperfect
CSCI 1290: Comp Photo
 CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. Feedback from Project 0 MATLAB: Live Scripts!=
CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. Feedback from Project 0 MATLAB: Live Scripts!=
Last Lecture. Bayer pattern. Focal Length F-stop Depth of Field Color Capture. Prism. Your eye. Mirror. (flipped for exposure) Film/sensor.
 Film/sensor.") Last Lecture Prism Mirror (flipped for exposure) Your eye Film/sensor Focal Length F-stop Depth of Field Color Capture Light from scene lens Mirror (when viewing) Bayer pattern YungYu Chuang s slide Today
Last Lecture Prism Mirror (flipped for exposure) Your eye Film/sensor Focal Length F-stop Depth of Field Color Capture Light from scene lens Mirror (when viewing) Bayer pattern YungYu Chuang s slide Today
Greg Ward / SIGGRAPH 2003
 Global Illumination Global Illumination & HDRI Formats Greg Ward Anyhere Software Accounts for most (if not all) visible light interactions Goal may be to maximize realism, but more often visual reproduction
Global Illumination Global Illumination & HDRI Formats Greg Ward Anyhere Software Accounts for most (if not all) visible light interactions Goal may be to maximize realism, but more often visual reproduction
High Dynamic Range Imaging.
 High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Image-based Lighting
 Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Recovering High Dynamic Range Radiance Maps in Matlab
 Recovering High Dynamic Range Radiance Maps in Matlab cs060m - Final project Daniel Keller This project comprises an attempt to leverage the built-in numerical tools and rapid-prototyping facilities provided
Recovering High Dynamic Range Radiance Maps in Matlab cs060m - Final project Daniel Keller This project comprises an attempt to leverage the built-in numerical tools and rapid-prototyping facilities provided
High Dynamic Range Lighting Paul Debevec, USC Institute for Creative Technologies. March 24, Game Developer s Conference 1
 March 4, 004 High Dynamic Range Lighting Paul Debevec University of Southern California Institute for Creative Technologies March 4, 004 5:30 6:30 pm www.debevec.org/ibl004/ Scenes lit with point light
March 4, 004 High Dynamic Range Lighting Paul Debevec University of Southern California Institute for Creative Technologies March 4, 004 5:30 6:30 pm www.debevec.org/ibl004/ Scenes lit with point light
The 7d plenoptic function, indexing all light.
 Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
Reflection Mapping
 Image-Based Lighting A Photometric Approach to Rendering and Compositing Paul Debevec Computer Science Division University of California at Berkeley http://www.cs.berkeley.edu/~debevec August 1999 Reflection
Image-Based Lighting A Photometric Approach to Rendering and Compositing Paul Debevec Computer Science Division University of California at Berkeley http://www.cs.berkeley.edu/~debevec August 1999 Reflection
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Image-Based Lighting
 Image-Based Lighting Eirik Holmøyvik CS194: Image Manipulation & Computational Photography with a lot of slides Alexei Efros, UC Berkeley, Fall 2014 donated by Paul Debevec Inserting Synthetic Objects
Image-Based Lighting Eirik Holmøyvik CS194: Image Manipulation & Computational Photography with a lot of slides Alexei Efros, UC Berkeley, Fall 2014 donated by Paul Debevec Inserting Synthetic Objects
Light. Properties of light. What is light? Today What is light? How do we measure it? How does light propagate? How does light interact with matter?
 Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Image-Based Lighting. Inserting Synthetic Objects
 Image-Based Lighting 15-463: Rendering and Image Processing Alexei Efros with a lot of slides donated by Paul Debevec Inserting Synthetic Objects Why does this look so bad? Wrong camera orientation Wrong
Image-Based Lighting 15-463: Rendering and Image Processing Alexei Efros with a lot of slides donated by Paul Debevec Inserting Synthetic Objects Why does this look so bad? Wrong camera orientation Wrong
Ray Tracing Assignment. Ray Tracing Assignment. Ray Tracing Assignment. Tone Reproduction. Checkpoint 7. So You Want to Write a Ray Tracer
 Ray Tracing Assignment So You Want to Write a Ray Tracer Goal is to reproduce the following Checkpoint 7 Whitted, 1980 Ray Tracing Assignment Seven checkpoints 1. Setting the Scene 2. Camera Modeling 3.
Ray Tracing Assignment So You Want to Write a Ray Tracer Goal is to reproduce the following Checkpoint 7 Whitted, 1980 Ray Tracing Assignment Seven checkpoints 1. Setting the Scene 2. Camera Modeling 3.
Image-Based Lighting. Eirik Holmøyvik. with a lot of slides donated by Paul Debevec
 Image-Based Lighting Eirik Holmøyvik with a lot of slides donated by Paul Debevec 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Inserting Synthetic Objects Why does this look so bad? Wrong
Image-Based Lighting Eirik Holmøyvik with a lot of slides donated by Paul Debevec 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Inserting Synthetic Objects Why does this look so bad? Wrong
Image-Based Lighting : Computational Photography Alexei Efros, CMU, Fall Eirik Holmøyvik. with a lot of slides donated by Paul Debevec
 Image-Based Lighting Eirik Holmøyvik with a lot of slides donated by Paul Debevec 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Inserting Synthetic Objects Why does this look so bad? Wrong
Image-Based Lighting Eirik Holmøyvik with a lot of slides donated by Paul Debevec 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Inserting Synthetic Objects Why does this look so bad? Wrong
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction
 A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant.
 Physically Based Rendering by Travis Grant.") CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant grant_travis@emc.com Basic Challenge: Film and Image Pipeline PBRT s output (EXR)
CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant grant_travis@emc.com Basic Challenge: Film and Image Pipeline PBRT s output (EXR)
High Dynamic Range Image Texture Mapping based on VRML
 High Dynamic Range Image Texture Mapping based on VRML Sung-Ye Kim and Byoung-Tae Choi 3D Graphics Research Team, Virtual Reality Research and Development Department, Computer Software Research Laboratory,
High Dynamic Range Image Texture Mapping based on VRML Sung-Ye Kim and Byoung-Tae Choi 3D Graphics Research Team, Virtual Reality Research and Development Department, Computer Software Research Laboratory,
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Lecture 4 Image Enhancement in Spatial Domain
 Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
Stochastic Path Tracing and Image-based lighting
 EDA101 : Advanced Shading and Rendering Stochastic Path Tracing and Image-based lighting Michael Doggett 2008 Tomas Akenine-Möller 1 This is what we want: Courtesy of Henrik Wann Jensen Courtesy of Paul
EDA101 : Advanced Shading and Rendering Stochastic Path Tracing and Image-based lighting Michael Doggett 2008 Tomas Akenine-Möller 1 This is what we want: Courtesy of Henrik Wann Jensen Courtesy of Paul
The Focused Plenoptic Camera. Lightfield photographers, focus your cameras! Karl Marx
 The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
Rendering Synthetic Objects into Real Scenes. based on [Debevec98]
![Rendering Synthetic Objects into Real Scenes. based on [Debevec98]](/thumbs/94/121105342.jpg "Rendering Synthetic Objects into Real Scenes. based on [Debevec98]") Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
IMAGE DE-NOISING IN WAVELET DOMAIN
 IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Cell-Sensitive Microscopy Imaging for Cell Image Segmentation
 Cell-Sensitive Microscopy Imaging for Cell Image Segmentation Zhaozheng Yin 1, Hang Su 2, Elmer Ker 3, Mingzhong Li 1, and Haohan Li 1 1 Department of Computer Science, Missouri University of Science and
Cell-Sensitive Microscopy Imaging for Cell Image Segmentation Zhaozheng Yin 1, Hang Su 2, Elmer Ker 3, Mingzhong Li 1, and Haohan Li 1 1 Department of Computer Science, Missouri University of Science and
References Photography, B. London and J. Upton Optics in Photography, R. Kingslake The Camera, The Negative, The Print, A. Adams
 Page 1 Camera Simulation Eect Cause Field o view Depth o ield Motion blur Exposure Film size, stops and pupils Aperture, ocal length Shutter Film speed, aperture, shutter Reerences Photography, B. London
Page 1 Camera Simulation Eect Cause Field o view Depth o ield Motion blur Exposure Film size, stops and pupils Aperture, ocal length Shutter Film speed, aperture, shutter Reerences Photography, B. London
Matting, Transparency, and Illumination. Slides from Alexei Efros
 New course focus Done with texture, patches, and shuffling image content. Focus on light, specifically light models derived from multiple photos of the same scene. Matting, Transparency, and Illumination
New course focus Done with texture, patches, and shuffling image content. Focus on light, specifically light models derived from multiple photos of the same scene. Matting, Transparency, and Illumination
CS354 Computer Graphics Ray Tracing. Qixing Huang Januray 24th 2017
 CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2007
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Capture and Displays CS 211A
 Capture and Displays CS 211A HDR Image Bilateral Filter Color Gamut Natural Colors Camera Gamut Traditional Displays LCD panels The gamut is the result of the filters used In projectors Recent high gamut
Capture and Displays CS 211A HDR Image Bilateral Filter Color Gamut Natural Colors Camera Gamut Traditional Displays LCD panels The gamut is the result of the filters used In projectors Recent high gamut
Computer Graphics (CS 543) Lecture 10: Normal Maps, Parametrization, Tone Mapping
 Lecture 10: Normal Maps, Parametrization, Tone Mapping") Computer Graphics (CS 543) Lecture 10: Normal Maps, Parametrization, Tone Mapping Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Normal Mapping Store normals in texture
Computer Graphics (CS 543) Lecture 10: Normal Maps, Parametrization, Tone Mapping Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Normal Mapping Store normals in texture
Measuring Light: Radiometry and Cameras
 Lecture 11: Measuring Light: Radiometry and Cameras Computer Graphics CMU 15-462/15-662, Fall 2015 Slides credit: a majority of these slides were created by Matt Pharr and Pat Hanrahan Simulating a pinhole
Lecture 11: Measuring Light: Radiometry and Cameras Computer Graphics CMU 15-462/15-662, Fall 2015 Slides credit: a majority of these slides were created by Matt Pharr and Pat Hanrahan Simulating a pinhole
Perceptual Effects in Real-time Tone Mapping
 Perceptual Effects in Real-time Tone Mapping G. Krawczyk K. Myszkowski H.-P. Seidel Max-Planck-Institute für Informatik Saarbrücken, Germany SCCG 2005 High Dynamic Range (HDR) HDR Imaging Display of HDR
Perceptual Effects in Real-time Tone Mapping G. Krawczyk K. Myszkowski H.-P. Seidel Max-Planck-Institute für Informatik Saarbrücken, Germany SCCG 2005 High Dynamic Range (HDR) HDR Imaging Display of HDR
Modeling Light. Slides from Alexei A. Efros and others
 Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Lenses & Exposure. Lenses. Exposure. Lens Options Depth of Field Lens Speed Telephotos Wide Angles. Light Control Aperture Shutter ISO Reciprocity
 Lenses & Exposure Lenses Lens Options Depth of Field Lens Speed Telephotos Wide Angles Exposure Light Control Aperture Shutter ISO Reciprocity The Viewfinder Camera viewfinder Image Sensor shutter lens
Lenses & Exposure Lenses Lens Options Depth of Field Lens Speed Telephotos Wide Angles Exposure Light Control Aperture Shutter ISO Reciprocity The Viewfinder Camera viewfinder Image Sensor shutter lens
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
To Do. Real-Time High Quality Rendering. Motivation for Lecture. Monte Carlo Path Tracing. Monte Carlo Path Tracing. Monte Carlo Path Tracing
 Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 5 Tour of Modern Offline Rendering To Do Project milestone (1-2 pages), final project proposal Due on Oct 27 Please get in touch with me if
Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 5 Tour of Modern Offline Rendering To Do Project milestone (1-2 pages), final project proposal Due on Oct 27 Please get in touch with me if
Lecture 18: Primer on Ray Tracing Techniques
 Lecture 18: Primer on Ray Tracing Techniques 6.172: Performance Engineering of Software Systems Joshua Slocum November 16, 2010 A Little Background Image rendering technique Simulate rays of light - ray
Lecture 18: Primer on Ray Tracing Techniques 6.172: Performance Engineering of Software Systems Joshua Slocum November 16, 2010 A Little Background Image rendering technique Simulate rays of light - ray
o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing Modeling
 Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Interactive Vizualisation of Complex Real-World Light Sources
 Interactive Vizualisation of Complex Real-World Light Sources Xavier Granier(1-2) Michael Goesele(3) (2) (3) Wolgang Heidrich Hans-Peter Seidel (1) (2) (3) IPARLA/INRIA LaBRI (Bordeaux) University of British
Interactive Vizualisation of Complex Real-World Light Sources Xavier Granier(1-2) Michael Goesele(3) (2) (3) Wolgang Heidrich Hans-Peter Seidel (1) (2) (3) IPARLA/INRIA LaBRI (Bordeaux) University of British
Motivation. Advanced Computer Graphics (Fall 2009) CS 283, Lecture 11: Monte Carlo Integration Ravi Ramamoorthi
 CS 283, Lecture 11: Monte Carlo Integration Ravi Ramamoorthi") Advanced Computer Graphics (Fall 2009) CS 283, Lecture 11: Monte Carlo Integration Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283 Acknowledgements and many slides courtesy: Thomas Funkhouser, Szymon
Advanced Computer Graphics (Fall 2009) CS 283, Lecture 11: Monte Carlo Integration Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283 Acknowledgements and many slides courtesy: Thomas Funkhouser, Szymon
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Explain The Basic Parts And Operation Of A Film Camera Or Digital Camera
 Explain The Basic Parts And Operation Of A Film Camera Or Digital Camera by Chris Woodford. Last updated: August 20, 2014. Snap a photo with your camera, cellphone, or MP3 player and you have a piece of
Explain The Basic Parts And Operation Of A Film Camera Or Digital Camera by Chris Woodford. Last updated: August 20, 2014. Snap a photo with your camera, cellphone, or MP3 player and you have a piece of
Outline of Lecture. Real-Time High Quality Rendering. Geometry or Vertex Pipeline. Basic Hardware Pipeline. Pixel or Fragment Pipeline
 Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 2 Graphics Hardware Pipeline, Reflection and Rendering Equations, Taonomy of Methods http://www.cs.ucsd.edu/~ravir Outline of Lecture Taonomy
Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 2 Graphics Hardware Pipeline, Reflection and Rendering Equations, Taonomy of Methods http://www.cs.ucsd.edu/~ravir Outline of Lecture Taonomy
Introduction to Shutter Speed in Digital Photography. Read more:
 Introduction to Shutter Speed in Digital Photography Read more: http://digital-photography-school.com/shutterspeed#ixzz26mrybgum What is Shutter Speed? shutter speed is the amount of time that the shutter
Introduction to Shutter Speed in Digital Photography Read more: http://digital-photography-school.com/shutterspeed#ixzz26mrybgum What is Shutter Speed? shutter speed is the amount of time that the shutter
(Geometric) Camera Calibration
 Camera Calibration") (Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
(Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
INFOGR Computer Graphics. J. Bikker - April-July Lecture 10: Shading Models. Welcome!
 INFOGR Computer Graphics J. Bikker - April-July 2016 - Lecture 10: Shading Models Welcome! Today s Agenda: Introduction Light Transport Materials Sensors Shading INFOGR Lecture 10 Shading Models 3 Introduction
INFOGR Computer Graphics J. Bikker - April-July 2016 - Lecture 10: Shading Models Welcome! Today s Agenda: Introduction Light Transport Materials Sensors Shading INFOGR Lecture 10 Shading Models 3 Introduction
TCM-5311 Configuration Advice for Indoor and
 ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
CSCI 1290: Comp Photo
 CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. Questions from Tuesday Aaron: Crepuscular rays
CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. Questions from Tuesday Aaron: Crepuscular rays
GAMES Webinar: Rendering Tutorial 2. Monte Carlo Methods. Shuang Zhao
 GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Consider a partially transparent object that is illuminated with two lights, one visible from each side of the object. Start with a ray from the eye
 Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference
Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference
Radiometry and reflectance
 Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
IMAGE BASED RENDERING: Using High Dynamic Range Photographs to Light Architectural Scenes
 IMAGE BASED RENDERING 1 IMAGE BASED RENDERING: Using High Dynamic Range Photographs to Light Architectural Scenes KATHLEEN CHENEY MEHLIKA INANICI University of Washington Abstract Image Based Rendering
IMAGE BASED RENDERING 1 IMAGE BASED RENDERING: Using High Dynamic Range Photographs to Light Architectural Scenes KATHLEEN CHENEY MEHLIKA INANICI University of Washington Abstract Image Based Rendering
Luxo Jr. (Pixar, 1986) Last Time. Real Cameras and Ray Tracing. Standard Rasterization. Lights, Cameras, Surfaces. Now Playing:
 Last Time. Real Cameras and Ray Tracing. Standard Rasterization. Lights, Cameras, Surfaces. Now Playing:") Now Playing: Luxo Jr. (Pixar, 1986) Giant Steps From Giant Steps Recorded May 4-5, 1959 John Coltrane - Tenor Sax Tommy Flanagan - Piano Paul Chambers - Bass Art Taylor - Drums Real Cameras and Ray Tracing
Now Playing: Luxo Jr. (Pixar, 1986) Giant Steps From Giant Steps Recorded May 4-5, 1959 John Coltrane - Tenor Sax Tommy Flanagan - Piano Paul Chambers - Bass Art Taylor - Drums Real Cameras and Ray Tracing
Daytime Long Exposures
 Daytime Long Exposures 1. Make sure you have the right equipment: DLSR Camera memory Card ND filter (neutral density)-make sure it will screw onto the front of your lens tripod camera shoe that fits your
Daytime Long Exposures 1. Make sure you have the right equipment: DLSR Camera memory Card ND filter (neutral density)-make sure it will screw onto the front of your lens tripod camera shoe that fits your
(and what the numbers mean)
") Using Neutral Density Filters (and what the numbers mean) What are ND filters Neutral grey filters that effectively reduce the amount of light entering the lens. On solid ND filters the light-stopping
Using Neutral Density Filters (and what the numbers mean) What are ND filters Neutral grey filters that effectively reduce the amount of light entering the lens. On solid ND filters the light-stopping
The 2 nd part of the photographic triangle
 The 2 nd part of the photographic triangle Shutter speed refers to the amount of time your sensor is exposed to light. In film photography shutter speed was the length of time that the film was exposed
The 2 nd part of the photographic triangle Shutter speed refers to the amount of time your sensor is exposed to light. In film photography shutter speed was the length of time that the film was exposed
Choosing the right course
 Choosing the right course CS 148 Winter, Hanrahan, not SCPD undergraduates only requires 107 terminal course broad and conceptual CS 248 lite + 2D image processing media technologies video technologies
Choosing the right course CS 148 Winter, Hanrahan, not SCPD undergraduates only requires 107 terminal course broad and conceptual CS 248 lite + 2D image processing media technologies video technologies
EF432. Introduction to spagetti and meatballs
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Product Evaluation Guide. for CMOS Megapixel IP Cameras. Version 1.0
 Product Evaluation Guide for CMOS Megapixel IP Cameras Version 1.0 TABLE OF CONTENT CHAPTER 1 INTRODUCTION... 4 1.1 PURPOSE... 4 1.2 OUTLINE... 4 CHAPTER 2 VIDEO COMPRESSION TECHNOLOGY... 4 2.1 WHAT VIDEO
Product Evaluation Guide for CMOS Megapixel IP Cameras Version 1.0 TABLE OF CONTENT CHAPTER 1 INTRODUCTION... 4 1.1 PURPOSE... 4 1.2 OUTLINE... 4 CHAPTER 2 VIDEO COMPRESSION TECHNOLOGY... 4 2.1 WHAT VIDEO
Architecture and Engineering Specifications SANYO VCC-HD Megapixel Full-HD Day/Night CS Box Camera
 Architecture and Engineering Specifications SANYO VCC-HD2300 4 Megapixel Full-HD Day/Night CS Box Camera A. General Characteristics: 1. Be designed to provide advanced image support resolutions up to 4
Architecture and Engineering Specifications SANYO VCC-HD2300 4 Megapixel Full-HD Day/Night CS Box Camera A. General Characteristics: 1. Be designed to provide advanced image support resolutions up to 4
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Control & Interface Electronics. CCD Sensor
 FEATURES High Performance Scientific Camera Hamamatsu S10141 Sensors 1024 x 122 to 2048 x 506 active pixels 12 µm x 12 µm pixel size Integrated TE Cooling -15 C from 20 C ambient Hermetically sealed Temperature
FEATURES High Performance Scientific Camera Hamamatsu S10141 Sensors 1024 x 122 to 2048 x 506 active pixels 12 µm x 12 µm pixel size Integrated TE Cooling -15 C from 20 C ambient Hermetically sealed Temperature
Radiometric Self Calibration
 Radiometric Self Calibration Tomoo itsunaga edia Processing Laboratories Sony Corporation mitsunag@avcrlsonycojp Shree K Nayar Department of Computer Science Columbia University nayar@cscolumbiaedu Abstract
Radiometric Self Calibration Tomoo itsunaga edia Processing Laboratories Sony Corporation mitsunag@avcrlsonycojp Shree K Nayar Department of Computer Science Columbia University nayar@cscolumbiaedu Abstract
Radiometric Calibration from a Single Image
 Radiometric Calibration from a Single Image Stephen Lin Jinwei Gu Shuntaro Yamazaki Heung-Yeung Shum Microsoft Research Asia Tsinghua University University of Tokyo Abstract Photometric methods in computer
Radiometric Calibration from a Single Image Stephen Lin Jinwei Gu Shuntaro Yamazaki Heung-Yeung Shum Microsoft Research Asia Tsinghua University University of Tokyo Abstract Photometric methods in computer
Architecture and Engineering Specifications SANYO VCC-HD2500P 4 Megapixel Full-HD Advanced Day/Night CS Box Camera
 Architecture and Engineering Specifications SANYO VCC-HD2500P 4 Megapixel Full-HD Advanced Day/Night CS Box Camera A. General Characteristics: 1. Be designed to provide advanced image support resolutions
Architecture and Engineering Specifications SANYO VCC-HD2500P 4 Megapixel Full-HD Advanced Day/Night CS Box Camera A. General Characteristics: 1. Be designed to provide advanced image support resolutions
Recap from Monday. Frequency domain analytical tool computational shortcut compression tool
 Recap from Monday Frequency domain analytical tool computational shortcut compression tool Fourier Transform in 2d in Matlab, check out: imagesc(log(abs(fftshift(fft2(im))))); Image Blending (Szeliski
Recap from Monday Frequency domain analytical tool computational shortcut compression tool Fourier Transform in 2d in Matlab, check out: imagesc(log(abs(fftshift(fft2(im))))); Image Blending (Szeliski
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS SESSION 15 RAY TRACING 1 Announcements Programming Assignment 3 out today - overview @ end of the class Ray Tracing 2 Lecture Overview Review of last class Ray Tracing 3 Local
COMP371 COMPUTER GRAPHICS SESSION 15 RAY TRACING 1 Announcements Programming Assignment 3 out today - overview @ end of the class Ray Tracing 2 Lecture Overview Review of last class Ray Tracing 3 Local
Shadow and Environment Maps
 CS294-13: Special Topics Lecture #8 Advanced Computer Graphics University of California, Berkeley Monday, 28 September 2009 Shadow and Environment Maps Lecture #8: Monday, 28 September 2009 Lecturer: Ravi
CS294-13: Special Topics Lecture #8 Advanced Computer Graphics University of California, Berkeley Monday, 28 September 2009 Shadow and Environment Maps Lecture #8: Monday, 28 September 2009 Lecturer: Ravi
Hue Candela s PinPLUS 64 mm Camera
 Hue Candela s PinPLUS 64 mm Camera 64 mm / 2.5 inch 100 degree Wide-angle Camera Hue Candela s PinPLUS cameras have maximized the basic pinhole camera design. View cameras with different focal lengths
Hue Candela s PinPLUS 64 mm Camera 64 mm / 2.5 inch 100 degree Wide-angle Camera Hue Candela s PinPLUS cameras have maximized the basic pinhole camera design. View cameras with different focal lengths
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
Computer Graphics (CS 563) Lecture 4: Advanced Computer Graphics Image Based Effects: Part 2. Prof Emmanuel Agu
 Lecture 4: Advanced Computer Graphics Image Based Effects: Part 2. Prof Emmanuel Agu") Computer Graphics (CS 563) Lecture 4: Advanced Computer Graphics Image Based Effects: Part 2 Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Image Processing Graphics concerned
Computer Graphics (CS 563) Lecture 4: Advanced Computer Graphics Image Based Effects: Part 2 Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Image Processing Graphics concerned
Specifications CAMEDIA C-8080 WIDE ZOOM
 Specifications CAMEDIA C-8080 WIDE ZOOM Model Type CAMEDIA C-8080 WIDE ZOOM Digital camera with 4.5 cm/1.8 inch sunshine colour TFT LCD monitor. Image sensor Image sensor 2/3 inch CCD solid-state image
Specifications CAMEDIA C-8080 WIDE ZOOM Model Type CAMEDIA C-8080 WIDE ZOOM Digital camera with 4.5 cm/1.8 inch sunshine colour TFT LCD monitor. Image sensor Image sensor 2/3 inch CCD solid-state image
Chapter 3-Camera Work
 Chapter 3-Camera Work The perfect camera? Make sure the camera you purchase works for you Is it the right size? Does it have the type of lens you need? What are the features that I want? What type of storage
Chapter 3-Camera Work The perfect camera? Make sure the camera you purchase works for you Is it the right size? Does it have the type of lens you need? What are the features that I want? What type of storage
Professional. Technical Guide N-Log Recording
 Professional Technical Guide N-Log Recording En Table of Contents N Log: A Primer... 3 Why Use N Log?...4 Filming N Log Footage... 6 Using Camera Controls...10 View Assist...11 Ensuring Consistent Exposure...12
Professional Technical Guide N-Log Recording En Table of Contents N Log: A Primer... 3 Why Use N Log?...4 Filming N Log Footage... 6 Using Camera Controls...10 View Assist...11 Ensuring Consistent Exposure...12
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Photometric Stereo.
 Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
SVD-4120A SSNR Low Light, WDR, Day & Night Vandal-Proof Color Dome Camera
 Low Light, WDR, Day & Night Vandal-Proof Color Dome Camera SVD-4120A www.samsungcctv.com Built-in chip Originally Developed by Samsung Techwin Crisp and clear images in any light Samsung Techwin's new
Low Light, WDR, Day & Night Vandal-Proof Color Dome Camera SVD-4120A www.samsungcctv.com Built-in chip Originally Developed by Samsung Techwin Crisp and clear images in any light Samsung Techwin's new