CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
|
|
|
- Jade Reeves
- 5 years ago
- Views:
Transcription


1 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital geometry Connected components Mathematical morphology Region descriptors Limitations Sources: Burger and Burge Digital Image Processing Chapter 11 L. G. Shapiro and G. C. Stockman Computer Vision, Prentice Hall Forsyth and Ponce Computer Vision a Modern approach Slides by Prof. L. UMD and G.C. A. Elgammal, Rutgers University 1



2 Problem definition Objective: Design a vision system to see a flat world Page of text: text, line drawings, etc. Side panel of a truck Objects on an inspection belt X-ray image of separated potatoes Microscopic image of blood cells etc. Binary Images can also be outcome of pixel classifiers, e.g. skin detector A. Elgammal, Rutgers University 2




3 Problem definition General approach to recognition/inspection Acquire gray scale image using camera Reduce to black and white image - black objects on white background Find individual black objects and measure their properties Compare those properties to object models Image segmentation How do we know which groups of pixels in a digital image correspond to the objects to be analyzed? objects may be uniformly darker or brighter than the background against which they appear black characters imaged against the white background of a page bright, dense potatoes imaged against a background that is transparent to X-rays A. Elgammal, Rutgers University 3
 But this rarely happens pixels overlap regions from both the object and")


 be the original, gray level image B(u,v) is a binary image")
 >= t We will assume that the 1 s are the object pixels and the 0 s are the background")
4 Image segmentation Ideally, object pixels would be black (0 intensity) and background pixels white (maximum intensity) But this rarely happens pixels overlap regions from both the object and the background, yielding intensities between pure black and white - edge blur cameras introduce noise during imaging - measurement noise e.g., potatoes have non-uniform thickness, giving variations in brightness in X-ray - model noise edge blur Image segmentation by thresholding But if the objects and background occupy different ranges of gray levels, we can mark the object pixels by a process called thresholding: Let I(u,v) be the original, gray level image B(u,v) is a binary image (pixels are either 0 or 1) created by thresholding I(u,v) B(u,v) = 1 if I(u,v) < t B(u,v) = 0 if I(u,v) >= t We will assume that the 1 s are the object pixels and the 0 s are the background pixels Thresholding is a point operation How to choose the threshold t? A. Elgammal, Rutgers University 4
 - gray level frequency distribution of the gray level image I.")
 h(g) peak ideal h peak observed histogram valley intensity, g Thresholding Peak and valley method Find the")

5 Thresholding How do we choose the threshold t? Histogram (h) - gray level frequency distribution of the gray level image I. h I (g) = number of pixels in F whose gray level is g H I (g) = number of pixels in F whose gray level is <=g (cumulative) h(g) peak ideal h peak observed histogram valley intensity, g Thresholding Peak and valley method Find the two most prominent peaks of h g is a peak if h(g) > h(g ± Δg), Δ g = 1,..., k Let g 1 and g 2 be the two highest peaks, with g 1 < g 2 Find the deepest valley, g, between g 1 and g 2 g is the valley if h F (g) <= h F (g ), g,g in [g1, g2] Use g as the threshold Problem: histograms are not smooth. How can we smooth a histogram? A. Elgammal, Rutgers University 5
 can be used to find the gray level, g, such that ~p% of the pixels have intensity <= g Then, we can examine h I in the neighborhood of g to find a good threshold (low")

6 Thresholding P-tile method in some applications we know approximately what percentage, p, of the pixels in the image come from objects might have one potato in the image, or one character. Cumulative histogram H I (g) can be used to find the gray level, g, such that ~p% of the pixels have intensity <= g Then, we can examine h I in the neighborhood of g to find a good threshold (low valley point) 100% p% H F g Triangle algorithm A line is constructed between the maximum of the histogram at brightness b max and the lowest value b min = (p=0)% in the image. The distance d between the line and the histogram h[b] is computed for all values of b from b = b min to b = b max. The brightness value b o where the distance between h[b o ] and the line is maximal is the threshold value. This technique is particularly effective when the object pixels produce a weak peak in the histogram. A. Elgammal, Rutgers University 6


7 Thresholding Hand selection Arbitrary select a threshold by hand! Many threshold selection methods in the literature Probabilistic methods make parametric assumptions about object and background intensity distributions and then derive optimal thresholds Structural methods Evaluate a range of thresholds wrt properties of resulting binary images one with straightest edges, maximum contrast, most easily recognized objects, etc. Local thresholding apply thresholding methods to image windows What s next after thresholding We need to detect separate regions in the binary image. This process is called: Region labeling Connected component labeling A. Elgammal, Rutgers University 7




8 Elements of Digital Geometry Emerged with the rise of computer technologies in the second half of the 20 th century Pioneers: A. Rosenfeld, J. L. Pfaltz Fundamental for computer graphics and digital image processing Deals with sets of grid points Mathematical roots: graph theory and discrete topology. Three Interrelated Areas: Digital Topology: concepts of open and closed sets, connectedness, digital Jordan curve theorem, Euler Numbers, Digital Geometry: the study of geometric properties of sets of lattice points produced by digitizing regions or curves in the plane: digitization, digital convexity, digital straightness. Graph theory and combinatorics of digital spaces: regions on the digital grid as a undirected graphs Neighborhood and Connectivity Definition: Given a pixel (i,j) its 4-neighbors are the points (i,j ) such that i-i + j-j = 1 the 4-neighbors are (i±1, j) and (i,j±1) Definition: Given a pixel (i,j) its 8-neighbors are the points (i,j ) such that max( i-i, j-j ) = 1 the 8- neighbors are (i, j±1), (i±1, j) and (i±1, j±1) A. Elgammal, Rutgers University 8
- connected to B if there is a pixel in A that is a 4(8)")
path from pixel (i 0,j 0 ) to (i n,j n ) is a sequence of pixels (i 0,j 0 ) (i 1,j 1 ) (i 2,j 2 ),.")
9 Connectivity 4-connectivity vs. 8-connectivity: Definition: Given two disjoint sets of pixels, A and B, A is 4(8)- connected to B if there is a pixel in A that is a 4(8) neighbor of a pixel in B So, we have to chose 4 or 8 neighborhood notion to use. Definition: A 4-(8)path from pixel (i 0,j 0 ) to (i n,j n ) is a sequence of pixels (i 0,j 0 ) (i 1,j 1 ) (i 2,j 2 ),... (i n,j n ) such that (i k, j k ) is a 4-(8) neighbor of (i k+1, j k+1 ), for k = 0,..., n-1 (i 0,j 0 ) (i 0,j 0 ) (i n, j n ) (i n, j n ) Every 4-path is an 8-path! A. Elgammal, Rutgers University 9
 connected to q in S if there is a path from p to q")


10 Connected-to relation Definition: Given a binary image, B, the set of all 1 s is called the foreground and is denoted by S Definition: Given a pixel p in S, p is 4(8) connected to q in S if there is a path from p to q consisting only of points from S using 4(8) neighbors. The relation is-connected-to is an equivalence relation Reflexive - p is connected to itself by a path of length 0 Symmetric - if p is connected to q, then q is connected to p by the reverse path Transitive - if p is connected to q and q is connected to r, then p is connected to r by concatenation of the paths from p to q and q to r Connected components A. Elgammal, Rutgers University 10

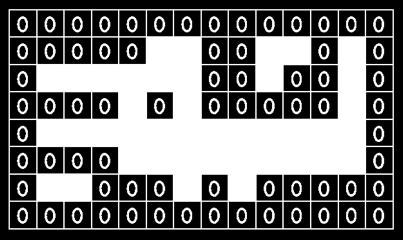
11 Examples - Yellow = 1, Green = 0 How many 4- (8) components of S? What is the background? Which are the 4- (8) holes? Background and foreground connectivity Use opposite connectivity for the foreground and the background 4-foreground, 8-background: 4 single pixel objects and no holes 4-background, 8-foreground: one 4 pixel object containing a 1 pixel hole A. Elgammal, Rutgers University 11



12 Connected Componenet Labeling Flood Fill like algorithms, breadth first, depth first Sequential Region Labeling: More efficient twopass algorithm for region labeling A. Elgammal, Rutgers University 12

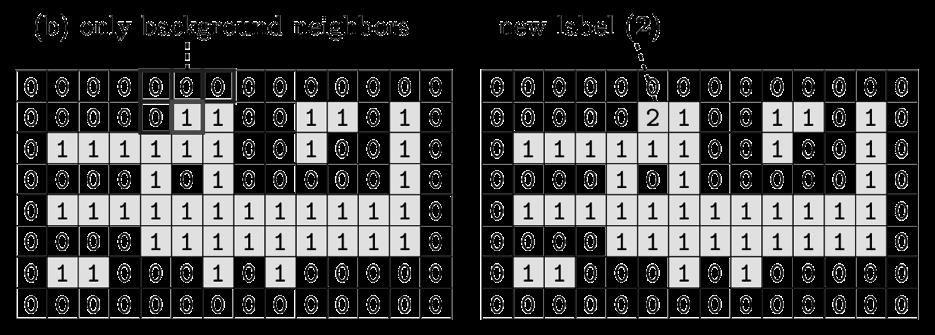

13 A. Elgammal, Rutgers University 13

14 A. Elgammal, Rutgers University 14

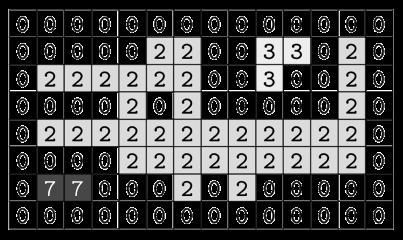
15 A. Elgammal, Rutgers University 15


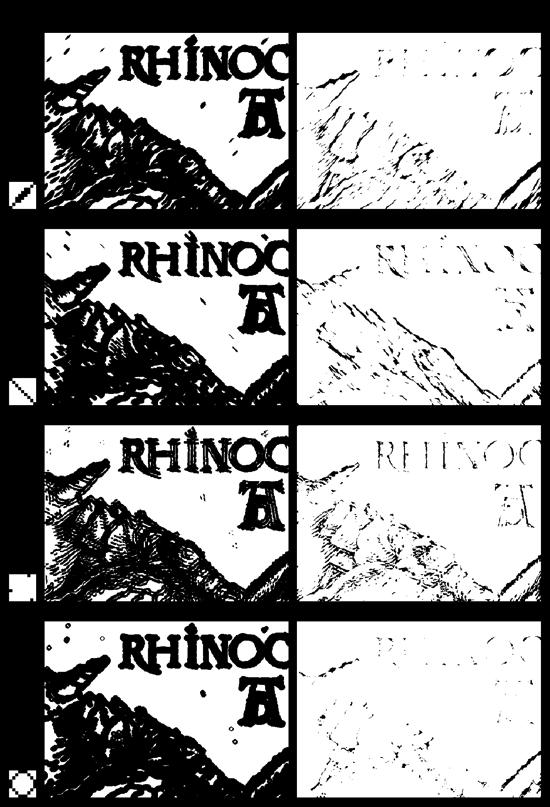
16 Things might not be perfect! Different regions might be connected due to noise or wrong threshold. What to do about that? Mathematical Morphology Binary mathematical morphology consists of two basic operations dilation and erosion and several composite relations closing and opening conditional dilation... A. Elgammal, Rutgers University 16
17 Dilation Dilation expands the connected sets of 1s of a binary image. It can be used for 1. growing features 2. filling holes and gaps Erosion Erosion shrinks the connected sets of 1s of a binary image. It can be used for 1. shrinking features 2. Removing bridges, branches and small protrusions A. Elgammal, Rutgers University 17
18 Structuring Elements A structuring element is a shape mask used in the basic morphological operations. They can be any shape and size that is digitally representable, and each has an origin. box hexagon disk something box(length,width) disk(diameter) Dilation with Structuring Elements The arguments to dilation and erosion are 1. a binary image B 2. a structuring element S dilate(b,s) takes binary image B, places the origin of structuring element S over each 1-pixel, and ORs the structuring element S into the output image at the corresponding position B S origin dilate B S A. Elgammal, Rutgers University 18
19 Erosion with Structuring Elements erode(b,s) takes a binary image B, places the origin of structuring element S over every pixel position, and ORs a binary 1 into that position of the output image only if every position of S (with a 1) covers a 1 in B. origin erode B S B S Example 1 to Try B S erode dilate with same structuring element A. Elgammal, Rutgers University 19

20 Example 2 to Try B S First erode and then dilate with the same S. Point Sets: For a binary image The corresponding point set consists of the coordinate pairs p =(u,v) for all foreground pixels, A. Elgammal, Rutgers University 20


21 Dilation Definition Erosion Definition A. Elgammal, Rutgers University 21

22 Dilation Erosion A. Elgammal, Rutgers University 22

23 A. Elgammal, Rutgers University 23
")
 A.")
24 Opening and Closing Closing is the compound operation of dilation followed by erosion (with the same structuring element) Opening is the compound operation of erosion followed by dilation (with the same structuring element) A. Elgammal, Rutgers University 24


25 A. Elgammal, Rutgers University 25



26 Gear Tooth Inspection Sternberg 1985: use morphology to detect missing or broken watch gear teeth Original binary image How did they do it? Detected defects Connected Components after thresholding Connected Components after Morphology A. Elgammal, Rutgers University 26







27 Region Contours Tracing a region contour is very useful to extract a descriptor of the region. Difficulties: External and internal contours The contour might run through the same pixel more than once Contour finding can be done after region labeling Algorithms for both region labeling and contour finding: when you first hit a contour, trace it. A. Elgammal, Rutgers University 27


")
28 Chain Codes: (Freeman codes) a method for contour encoding Begin at a given point and represent the contour by a sequence of discrete directional changes Absolute chain code Differential chain code Properties of Binary Regions Our goal is to recognize each connected component as one of a set of known objects letters of the alphabet good potatoes versus bad potatoes We need to associate measurements, or properties, with each connected component that we can compare against expected properties of different object types. An important aspect is the invariance of the descriptor: Invariant to translation Invariant to scaling (size) Invariant to rotation Other invariants A. Elgammal, Rutgers University 28


29 Properties of Binary Regions Geometric Features Statistical Shape Properties Moment-based geometrical properties Projections. Geometric Features Perimeter Area Compactness and Roundness Bounding box Convex hull A. Elgammal, Rutgers University 29

 Count the number of sides of pixels in the component adjacent to 0 s these are the cracks between the pixels clockwise traversal of these cracks is called a crack code perimeter of black is 4,")
30 How do we compute the perimeter of a connected component? 1. Count the number of pixels in the component adjacent to 0 s perimeter of black square would be 1 but perimeter of gray square, which has 4x the area, would be 4 but perimeter should go up as sqrt of area 2. Count the number of 0 s adjacent to the component works for the black and gray squares, but fails for the red dumbbell How do we compute the perimeter of a connected component? 3) Count the number of sides of pixels in the component adjacent to 0 s these are the cracks between the pixels clockwise traversal of these cracks is called a crack code perimeter of black is 4, gray is 8 and blue is 8 What effect does rotation have on the value of a perimeter of the digitization of a simple shape? rotation can lead to large changes in the perimeter and the area! A. Elgammal, Rutgers University 30



31 Perimeter from a chain code Perimeter Area Compactness and Roundness A. Elgammal, Rutgers University 31





32 Bounding box: minimal axis-parallel rectangle that encloses all the points of the region Convex hull: the smallest polygon within which the all points in the region fit. Convexity: relationship between the length of the convex hull and the perimeter of the region Density: the ratio between the area of the region and the area of the convex hull Statistical shape properties Centroid Moments For binary images: A. Elgammal, Rutgers University 32
 moments: shift the coordinate system to the")
 of the region Geometric properties from")

33 Central Moments: position-independent (translation invariant) moments: shift the coordinate system to the centroid: Normalized central moments: invariant to the size (scale) of the region Geometric properties from moments Orientation: Direction of the major axis Eccentricity: elongatedness A. Elgammal, Rutgers University 33



34 Invariant moments Hu s moments: seven combinations of the normalized centeral moments. Invariant to translation, scaling and orientation. A. Elgammal, Rutgers University 34




35 Projections Horizontal and vertical projection of the shapes Shortcomings of our machine vision system Object detection thresholding will not extract intact objects in complex images shading variations on object surfaces texture advanced segmentation methods edge detection - locate boundaries between objects and background, between objects and objects region analysis - find homogeneous regions; small combinations might correspond to objects. A. Elgammal, Rutgers University 35


36 Shortcomings of our machine vision system Occlusion What if one object is partially hidden by another? properties of the partially obscured, or occluded, object will not match the properties of the class model Correlation - directly compare image of the ideal objects against real images in correct overlap position, matching score will be high Represent objects as collection of local features such as corners of a rectangular shape locate the local features in the image find combinations of local features that are configured consistently with objects Shortcomings of our machine vision system Recognition of three dimensional objects the shape of the image of a three dimensional object depends on the viewpoint from which it is seen Model a three dimensional object as a large collection of view-dependent models Model the three dimensional geometry of the object and mathematically relate it to its possible images mathematical models of image geometry mathematical models for recognizing three dimensional structures from two dimensional images A. Elgammal, Rutgers University 36

37 Shortcomings of our machine vision system Articulated objects pliers derricks Deformable objects faces jello Amorphous objects fire water A. Elgammal, Rutgers University 37
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Binary Image Analysis. Binary Image Analysis. What kinds of operations? Results of analysis. Useful Operations. Example: red blood cell image
 inary Image Analysis inary Image Analysis inary image analysis consists of a set of image analysis operations that are used to produce or process binary images, usually images of s and s. represents the
inary Image Analysis inary Image Analysis inary image analysis consists of a set of image analysis operations that are used to produce or process binary images, usually images of s and s. represents the
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
morphology on binary images
 morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CSE 152 Lecture 7. Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Connected components - 1
 Connected Components Basic definitions Connectivity, Adjacency, Connected Components Background/Foreground, Boundaries Run-length encoding Component Labeling Recursive algorithm Two-scan algorithm Chain
Connected Components Basic definitions Connectivity, Adjacency, Connected Components Background/Foreground, Boundaries Run-length encoding Component Labeling Recursive algorithm Two-scan algorithm Chain
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Detection of Edges Using Mathematical Morphological Operators
 OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
CSE 152 Lecture 7` Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Announcements. Binary Image Processing. Binary System Summary. Histogram-based Segmentation. How do we select a Threshold?
 Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection
 Lecture 5: Edge Detection (Part 2) & Corner Detection") Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Edge Detection Image processing
Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Edge Detection Image processing
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Image Analysis Image Segmentation (Basic Methods)
") Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Schools of thoughts on texture
 Cameras Images Images Edges Talked about images being continuous (if you blur them, then you can compute derivatives and such). Two paths: Edges something useful Or Images something besides edges. Images
Cameras Images Images Edges Talked about images being continuous (if you blur them, then you can compute derivatives and such). Two paths: Edges something useful Or Images something besides edges. Images
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Chamfer matching. More on template matching. Distance transform example. Computing the distance transform. Shape based matching.
 Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations I
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
Chapter 9 Morphological Image Processing
 Morphological Image Processing Question What is Mathematical Morphology? An (imprecise) Mathematical Answer A mathematical tool for investigating geometric structure in binary and grayscale images. Shape
Morphological Image Processing Question What is Mathematical Morphology? An (imprecise) Mathematical Answer A mathematical tool for investigating geometric structure in binary and grayscale images. Shape
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Announcements. Analysis of Binary Images. Color Reflectance
 Announcements Analysis of Binary Images HW0 returned HW1 due Thursday Wed 10:00, Discussion Section EBU3b 2217 Introduction to Computer Vision CSE 152 Lecture 7 The appearance of colors Color appearance
Announcements Analysis of Binary Images HW0 returned HW1 due Thursday Wed 10:00, Discussion Section EBU3b 2217 Introduction to Computer Vision CSE 152 Lecture 7 The appearance of colors Color appearance
11/10/2011 small set, B, to probe the image under study for each SE, define origo & pixels in SE
 Mathematical Morphology Sonka 13.1-13.6 Ida-Maria Sintorn ida@cb.uu.se Today s lecture SE, morphological transformations inary MM Gray-level MM Applications Geodesic transformations Morphology-form and
Mathematical Morphology Sonka 13.1-13.6 Ida-Maria Sintorn ida@cb.uu.se Today s lecture SE, morphological transformations inary MM Gray-level MM Applications Geodesic transformations Morphology-form and
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
International Journal of Advance Engineering and Research Development. Applications of Set Theory in Digital Image Processing
 Scientific Journal of Impact Factor (SJIF): 4.72 International Journal of Advance Engineering and Research Development Volume 4, Issue 11, November -2017 Applications of Set Theory in Digital Image Processing
Scientific Journal of Impact Factor (SJIF): 4.72 International Journal of Advance Engineering and Research Development Volume 4, Issue 11, November -2017 Applications of Set Theory in Digital Image Processing
2: Image Display and Digital Images. EE547 Computer Vision: Lecture Slides. 2: Digital Images. 1. Introduction: EE547 Computer Vision
 EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Color Matching Functions. The principle of trichromacy. CIE xyy (Chromaticity Space) Color spaces. Intro Computer Vision. CSE 152 Lecture 7`
 Color spaces. Intro Computer Vision. CSE 152 Lecture 7`") Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Morphological track 1
 Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Image retrieval based on region shape similarity
 Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
How and what do we see? Segmentation and Grouping. Fundamental Problems. Polyhedral objects. Reducing the combinatorics of pose estimation
 Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Morphological Image Processing
 Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Image-Based Competitive Printed Circuit Board Analysis
 Image-Based Competitive Printed Circuit Board Analysis Simon Basilico Department of Electrical Engineering Stanford University Stanford, CA basilico@stanford.edu Ford Rylander Department of Electrical
Image-Based Competitive Printed Circuit Board Analysis Simon Basilico Department of Electrical Engineering Stanford University Stanford, CA basilico@stanford.edu Ford Rylander Department of Electrical
Announcements. The principle of trichromacy. Color Matching Functions. The appearance of colors
 Announcements Introduction to Computer Vision CSE 152 Lecture 7` HW1 due on Thursday See links on web page for reading Section: Mondays 3:00-3:50PM, Pepper Canyon Hall, Rm. 120 Kriegman Office Hrs: Tuesday
Announcements Introduction to Computer Vision CSE 152 Lecture 7` HW1 due on Thursday See links on web page for reading Section: Mondays 3:00-3:50PM, Pepper Canyon Hall, Rm. 120 Kriegman Office Hrs: Tuesday
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Image Segmentation. Segmentation is the process of partitioning an image into regions
 Image Segmentation Segmentation is the process of partitioning an image into regions region: group of connected pixels with similar properties properties: gray levels, colors, textures, motion characteristics
Image Segmentation Segmentation is the process of partitioning an image into regions region: group of connected pixels with similar properties properties: gray levels, colors, textures, motion characteristics
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Analysis. Morphological Image Analysis
 Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department
Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department