The Discrete Surface Kernel: Framework and Applications
|
|
|
- Lesley Norman Stevens
- 5 years ago
- Views:
Transcription
1 The Discrete Surface Kernel: Framework and Applications Naoufel Werghi College of Information Technology University of Dubai Dubai, UAE Abstract This paper presents a framework for the computation of a discrete surface kernel, defined as the set of points from which the whole surface is visible. The first part of the paper exposes the theoretical background related to the kernel computation. In this part we also demonstrate the invariance of the surface kernel to rigid geometric transformations. The second part describes two exploitations of the surface kernel concept in the computer vision area, namely spherical surface shape representation and surface registration. This framework has been tested and experimented on real 3D face surfaces 1. I. INTRODUCTION The last decade has witnessed a proliferation of the 3D digitizers, scanners and a substantial developments in techniques for modelling, and digitizing 3D object shapes. This has led to an explosion in the number of available 3D models in the world wide web and in domain-specific databases. This progress fuelled the development of 3D shape analysis, description, modelling and classification methods to bridge the gap between the 3D shape digitizing technology and the potential applications. In this context, we propose a methodology for the computation of particular surface attribute, namely the surface kernel. Basically the kernel of a given surface is the space from which the whole surface is visible. This methodology is built upon the concept of starshapeness defined in the continuous space [1]. In this paper, we project the concept of starshapeness on the class of discrete manifolds (triangularmeshed surface) to derive a theocratical framework that allows the determination of the discrete set of points satisfying the visibility condition. This framework covers both closed and open surfaces. The rest of the paper is organized as follows: Section 2 describes the theatrical foundations of the kernel computation and its implementation. Section 3 handles the invariance of the kernel with respect to rigid geometric transformations. Section 4 exposes two applications of the kernel concept, namely the spherical parametrization of the surface, and the registration of the 3D surfaces. Section 5 terminates with concluding remarks and future work. 1 The face surface data are from the public BU-3DFEFB database of the Department of Computing Sciences, State University of New York at Binghamton. II. THE DISCRETE SURFACE KERNEL Notation S a 2-D manifold surface. Int(S) The interior of S. S n : a triangle mesh surface composed of n triangles facets t i,..n. P i : Plane associated to the triangle facet t i, having a normal n i, passing by the point x i and defined by P i = {x R 3 \ (x x i ).n i =0}). H i : negative half space associated to the facet t i, defined by H i = {x R 3, \ (x x i ).n i 0}). H i is adopted as the interior of the facet t i. Definition 1: Let y a point Int(S), Letx S,wesay that y sees x via Int(S) if the segment [xy] Int(S). Definition 2: Let y a point S, the star of y with respect to S, noted Star(y, S), is the set of all points of S that can be seen from y via Int(S). Definition 3:A Star-center of S is a point y Int(S) such that Star(y, S) = S. We Say that S is a star-shaped with respect to y. Definition 4: The kernel of S, noted Ker(S), isthesetof all the Star-centers of S. Definition 5: S is Star-shaped if Ker(S). Lemma 1 The kernel of a single triangle facet t i is the half space H i Proof H i is the kernel of the facet t i if any point in H i can see the all the points of the facet t i. This can be translated to the following statement: x t i, y H i, the segment [xy] H i. To prove this statement we need to demonstrate that any point of the segment [xy] belongs to H i. A point p of the segment [x y] can be expressed by p = y + λ(x y), λ [0 1]. To belong to H i, p must satisfy (p x i ).n i 0 (p x i ).n i =(y + λ(x y) x i ).n i, x t i, then it can be expressed by /08/$25.00 c 2008 IEEE CIS 2008
2 , with u.n i =0. We get then x = x i + u (p x i ).n i = (y + λ(x i + u y) x i ).n i = ((y x i ) λ(y x i )).n i + λu.n i = (1 λ)(y x i ).n i (1 λ) 0 and y H i, then (1 λ)(y x i ).n i 0. Thus p H i. Theorem 1: LetS n a triangle mesh surface, then Ker(S n ) is the intersection of the half spaces H i,..n Proof: By induction The theorem holds for a single facet surface S 1 as using lemma1wehaveh 1 is the kernel of the facet t 1. Let assume that the theorem holds for S n, let prove that it does also for S. We have Ker(S n )= n H i. In another hand, Let x Ker(S ), then x can see t 1,t 2,..., t, then x can see S n and can see t, then x Ker(S n ) and x Ker(t ), then x n H i and x H, then x n H i H, then x H i. Therefore Ker(S ) is the intersection of the half spaces H i,..n +1 A. Computing the Kernel The Kernel of the surface S n is determined with the following simple algorithm Generate a 3-D Grid of points G that contain the surface S n (via its convex hull). Ker(S n ) G For each facet t i Find, in Ker(S n ), the set of points Y i that lie in the half-space H i Ker(S n ) Y i End For In the worst case, this algorithm has a complexity of O(N M), where N and M are the number of facets and the number of points in the initial grid respectively. However since the number is expected to decrease across the surface facets, the average complexity can be reasonably estimated to O(L),where L is a fraction of N M. III. INVARIANCE OF THE KERNEL WITH RESPECT TO GEOMETRIC TRANSFORMATIONS In this section we will demonstrate that the discrete surface kernel is invariant with respect to rigid geometric transformation. Lemma 2: LetT a geometric transformation defined by T (X) =R(X) +T, where R and T are a 3D rotation and translation respectively, let t i a triangle facet, let t i = T (t i) then Ker(t i )=T(Ker(t i)) Proof Let y i a point of H i the kernel of t i, then we have y i = T (y i ) = R(y i )+T Let t i = T (t i ), then we have = T (x i )=R(x i )+T n i = R(n i ) x i We need to demonstrate that y i Ker(t i ), i.e. (x i y i).n i 0 (x i y i).n i = (R(x i )+T R(y i ) T ).R(n i ) = R(x i y i ).R(n i ) The invariance of the dot product with respect to rotation, yields to R(x i y i ).R(n i )=(x i y i ).n i In another hand, y i H i implies (x i y i ).n i 0 Then R(x i y i ).R(n i ) 0, and thus Therefore y i ker(t i ) (x i y i).n i 0 Theorem 2: Let S n a triangle mesh surface, Let T a geometric transformation defined by T (X) = R(X) +T, where R and T are a 3D rotation and translation respectively, and let S n = T (S n ), then we have Ker(S n)=t (Ker(S n )) Proof:By Induction The theorem holds for a single facet surface S 1. This can be proven using Lemma 2. Assuming that the theorem holds for S n, let prove that it also does for S. According to Theorem 1, we have Ker(S )= H i
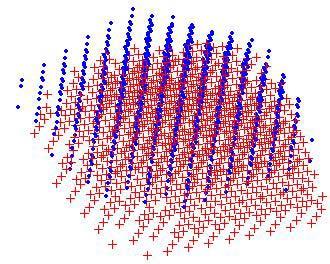
 The 3D face surface, (b) the 3D grid of points, (c) the discrete kernel of the face surface.")
) = Ker(T (S n )) = Ker(S n) then using Theorem 1, we can write n")
) = = n H i H i H = Ker(S ) = Ker(T (S )) IV.")



![parameterize the mesh over a domain which is topologically equivalent to it [2].](/docs-images/82/86064590/images/3-6.jpg "A spherical parametrization would permit the use of harmonic functions on the sphere, such as spherical")
![harmonics [3], double Fourier series, [4], spherical diffusion, [5] and spherical wavelets [6], for the purpose](/docs-images/82/86064590/images/3-7.jpg "of 3D shape description, analysis, and retrieval.")
, where r is the distance form")




 it allows to determine the sphere s center that ensure a maximum extend of the radial function r = r(φ, θ)")
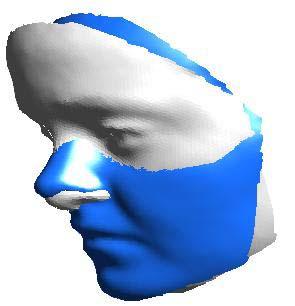
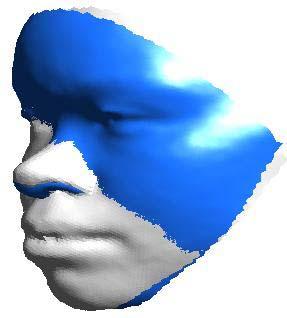
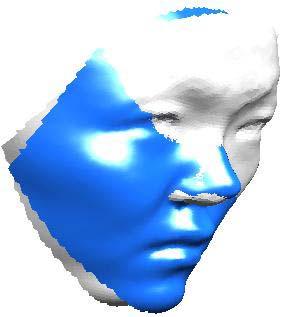
3 (a) (b) (c) Fig. 1. (a) The 3D face surface, (b) the 3D grid of points, (c) the discrete kernel of the face surface. then we can write T (Ker(S )) = T ( H i ) n = T ( H i H ) n = T ( H i ) T (H ) = T (Ker(S n )) T (Ker(t )) The theorem holds for S n then we have T (Ker(S n )) = Ker(T (S n )) = Ker(S n) then using Theorem 1, we can write n T (Ker(S n )) = Using lemma 2, we have H i T (Ker(t )) = Ker(T (t )) = Ker(t ) = H Therefore we can write T (Ker(S )) = = n H i H i H = Ker(S ) = Ker(T (S )) IV. APPLICATIONS In this section we shade some light on two particular applications of the surface kernel, namely spherical parametrization and surface registration Fig. 2. A. Spherical parametrization Samples of 3D face surface kernels. Spherical representation of surface shapes is of great usefulness in many applications related to 3D shape modelling and analysis retrieval. For instance when meshing free-from shapes that are topologically equivalent to a sphere, it is best to parameterize the mesh over a domain which is topologically equivalent to it [2]. A spherical parametrization would permit the use of harmonic functions on the sphere, such as spherical harmonics [3], double Fourier series, [4], spherical diffusion, [5] and spherical wavelets [6], for the purpose of 3D shape description, analysis, and retrieval. The spherical parametrization projects the surface on the unit sphere around its center. The surface can then be described using standard spherical coordinates r = r(φ, θ), where r is the distance form the origin to the point on the surface, r here is a radial function with two parameters φ and θ representing the latitude and the longitude respectively. However, to cover the whole surface, the sphere s center must satisfy the visibility requirement, i.e. the whole surface must be visible from the center, or else the radial function will exhibit gaps and discontinuities. The point derived from the center of mass of the surface, and which usually adopted as the sphere s center do not necessarily satisfy that requirement, particularly when the surface shape is not convex. Determining the surface kernel has three benefits 1) It indicates whether or not the a surface can be spherically parameterized, by checking whether or not the kernel is not empty. 2) It allows choosing a sphere s center which is guaranteed to satisfy the visibility requirement. 3) it allows to determine the sphere s center that ensure a maximum extend of the radial function r = r(φ, θ) over the unit sphere. Figure 3 shows radial functions of three surface face samples and their corresponding surface reconstructions. Figure 4 depicts radial functions and surface reconstructions, of a same face, corresponding to three different sphere centers. The three centers belong to the surface kernel. The first and the third are respectively the closest and the distant point to the face surface along the face orientation, the third is the midway point of the two extremes. It is interesting to note that the closer is the sphere s center to the face surface the larger is the radial function domain, and the better is the surface reconstruction.







![in biomedical imaging [10].](/docs-images/82/86064590/images/4-7.jpg "The registration of two surfaces consists in estimating")













4 (a) Fig. 3. First row: radial function on the sphere of some face surface samples. Second row: related face surface reconstruction. (b) (c) Fig. 4. First row: radial function on the sphere of the same face, corresponding to three different spheres centers. Second row: the corresponding face surface reconstruction. B. Surface registration 3 Surface registration used in a variety of applications that span building terrain maps in the context of autonomous vehicle [7], [8], recognizing and retrieving objects from 3D object model databases[9], and reconciling various imaging modalities in biomedical imaging [10]. The registration of two surfaces consists in estimating the mapping between coordinate systems associated with each surface. I.e. estimating the geometric transformation (Rotation and translation) that maps the two surfaces. The registration has been one of the most intriguing problems in computer vision. In effect, it raises hard issues, particularly the elaboration of the surface representation and the matching (corresponding) between features derived from the surface representation [11]. The invariance of the kernel with respect to rigid transformation, allows to use surfaces kernels in the registration rather than the surfaces themselves. There are two reasons that would favor this alternative 1) The simplicity of the kernel shape. In effect the kernel has a convex shape that exhibits attractive properties, e.g. well defined orientation, smoothness. 2) the area of kernel is quite small relatively to the surface s area, this would reduce considerably the space of correspondences. These interesting aspects suggest that employing the surface in the registration would alleviate the complexity of the aforementioned issues. We applied kernel based registration on a set of 3D face (d) (e) Fig. 5. Three examples of face surfaces registration using the surface kernel. (a) samples of face surfaces. (b) Transformed Surfaces. (c) Kernel s locations before registration. (d) registered kernels. (e) registered face surfaces. surfaces (samples are depicted in Figure 5). In this experiment we took group of face surface pairs, each pair contains two face surface samples at different positions and orientations (Figure 5.(a,b)). The kernels of the face surfaces in the pair are determined (Figure 5.c), then used to estimate the geometric transformation that maps them (Figure 5.d). The geometric transformation maps also their corresponding face surfaces as shown in (Figure 5.e). We mention here, that we have used a simple and naive registration technique, as our objective here is to demonstrate the feasibility of the approach rather than obtaining an accurate registration. V. CONCLUSION In this paper, we elaborated a theoretical framework for determining a surface kernel for the class of triangular meshed
5 2D manifolds. We established a simple algorithm for estimating the kernel, and we proved the invariance of the kernel with respect to rigid geometric transformations. We illustrated the usefulness of the surface kernel on two applications: spherical parametrization and registration of 3D surfaces. The surface examples treated in this paper are open surfaces, yet the framework holds also close surfaces. The surface kernel can also be exploited in classification tasks, for example categorizing surfaces into starshaped and non-starshaped ones, depending whether or not the corresponding kernels are empty or not. This framework can also be used to establish a metric for measuring the starshapeness of a surface, for example by using the size of the kernel s volume. We plan to extensively explore this aspect in the future. We plan also to investigate how we can automatically determine the optimal point from the discrete kernel to be used as the sphere center, guided by the observations of Figure 4. ACKNOWLEDGMENT The author would like to thank the Department of Computing Sciences in State University of New York at Binghamton for providing the 3D faces database. REFERENCES [1] F. A. Toranzos, The points of local nonconvexity of starshaped objects sets, Pacific Journal of Mathematics, Vol.101, No.1, [2] C. Gotsman, X. Gu, A. Sheffer, Fundamentals of spherical parameterization for 3D meshes, ACM Trans. Graphics Vol. 22, No.3, 2003, pp [3] M.M. Kazhdan, T.A. Funkhouser, S. Rusinkiewicz, Rotation Invariant Spherical Harmonic Representation of 3D Shape Descriptors, Symposium on Geometry Processing, 2003, pp , [4] D. V. Vranic and D. Saupe, Description of 3D-Shape using a Complex Function on the Sphere, I Proc. IEEE International Conference on Multimedia and Expo (ICME 2002), Lausanne, Switzerland, pp , August, [5] T. Bulow, Spherical Diffusion for 3D Surface Smoothing, IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol. 26, No. 12, December 2004, pp [6] N. Werghi, A Discriminative 3D Wavelet-based Descriptors: Application to the Recognition of Human Body Postures, Pattern recognition letters, Vol.26, No.5, pp , 2005 [7] M. Hebert et al, Terrain Mapping for a Roving Planetary Explorer, IEEE. Proc. Int. Conf. Robotics and Automation, pp , [8] A. Gruen, D. Akca,. Least squares 3D surface and curve matching. ISPRS Journal of Photogrammetry and Remote Sensing, Vol. 59, No.3 pp , 2005 [9] T. Funkhouser, M. Kazhadan, P. Min, P. Shilane, Shape-Based Retrieval and Analysis of 3D Models,Communications of the ACM, Vol.48,No.6, pp-58-64, [10] M.A. Audette, F.P. ferrie, T.M. Peters, An algorithmic Overview of Surface Registration Techniques for Medical Imaging, Medical Image Analysis, Vol.4 No.3, pp , [11] D.A. Forsythe, J. Ponce, Computer Vision: A Modern Appraoch, Prentice Hall 2003.
4. ELLIPSOID BASED SHAPE REPRESENTATION
 Proceedings of the IIEEJ Image Electronics and Visual Computing Workshop 2012 Kuching, Malaysia, November 21-24, 2012 AN ELLIPSOID SHAPE APPROXIMATION APPROACH FOR 3D SHAPE REPRESENTATION Asma Khatun *,
Proceedings of the IIEEJ Image Electronics and Visual Computing Workshop 2012 Kuching, Malaysia, November 21-24, 2012 AN ELLIPSOID SHAPE APPROXIMATION APPROACH FOR 3D SHAPE REPRESENTATION Asma Khatun *,
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES
 A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
As a consequence of the operation, there are new incidences between edges and triangles that did not exist in K; see Figure II.9.
 II.4 Surface Simplification 37 II.4 Surface Simplification In applications it is often necessary to simplify the data or its representation. One reason is measurement noise, which we would like to eliminate,
II.4 Surface Simplification 37 II.4 Surface Simplification In applications it is often necessary to simplify the data or its representation. One reason is measurement noise, which we would like to eliminate,
CLASSIFICATION OF SURFACES
 CLASSIFICATION OF SURFACES JUSTIN HUANG Abstract. We will classify compact, connected surfaces into three classes: the sphere, the connected sum of tori, and the connected sum of projective planes. Contents
CLASSIFICATION OF SURFACES JUSTIN HUANG Abstract. We will classify compact, connected surfaces into three classes: the sphere, the connected sum of tori, and the connected sum of projective planes. Contents
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Aspect-Ratio Voronoi Diagram with Applications
 Aspect-Ratio Voronoi Diagram with Applications Tetsuo Asano School of Information Science, JAIST (Japan Advanced Institute of Science and Technology), Japan 1-1 Asahidai, Nomi, Ishikawa, 923-1292, Japan
Aspect-Ratio Voronoi Diagram with Applications Tetsuo Asano School of Information Science, JAIST (Japan Advanced Institute of Science and Technology), Japan 1-1 Asahidai, Nomi, Ishikawa, 923-1292, Japan
Lagrange multipliers October 2013
 Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
Image Comparison on the Base of a Combinatorial Matching Algorithm
 Image Comparison on the Base of a Combinatorial Matching Algorithm Benjamin Drayer Department of Computer Science, University of Freiburg Abstract. In this paper we compare images based on the constellation
Image Comparison on the Base of a Combinatorial Matching Algorithm Benjamin Drayer Department of Computer Science, University of Freiburg Abstract. In this paper we compare images based on the constellation
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),
![[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),](/thumbs/82/84755349.jpg "[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),") [Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978), 296-298. [Ch] [CI] [EET] [ET] [FM] [GJPT] [Gr] [HM] [KKT] Chazelle, B., A theorem on polygon cutting
[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978), 296-298. [Ch] [CI] [EET] [ET] [FM] [GJPT] [Gr] [HM] [KKT] Chazelle, B., A theorem on polygon cutting
3D Wireless Sensor Networks: Challenges and Solutions
 3D Wireless Sensor Networks: Challenges and Solutions Hongyi Wu Old Dominion University Ph.D., CSE, UB, 2002 This work is partially supported by NSF CNS-1018306 and CNS-1320931. 2D PLANE, 3D VOLUME, AND
3D Wireless Sensor Networks: Challenges and Solutions Hongyi Wu Old Dominion University Ph.D., CSE, UB, 2002 This work is partially supported by NSF CNS-1018306 and CNS-1320931. 2D PLANE, 3D VOLUME, AND
Lecture 2 September 3
 EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
Measuring Cubeness of 3D Shapes
 Measuring Cubeness of 3D Shapes Carlos Martinez-Ortiz and Joviša Žunić Department of Computer Science, University of Exeter, Exeter EX4 4QF, U.K. {cm265,j.zunic}@ex.ac.uk Abstract. In this paper we introduce
Measuring Cubeness of 3D Shapes Carlos Martinez-Ortiz and Joviša Žunić Department of Computer Science, University of Exeter, Exeter EX4 4QF, U.K. {cm265,j.zunic}@ex.ac.uk Abstract. In this paper we introduce
Lagrange multipliers 14.8
 Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 Maximum? 1 1 Minimum? 3/2 Idea:
Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 Maximum? 1 1 Minimum? 3/2 Idea:
Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada
 Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada 1 Introduction In this project we present an overview of (1) low dimensional embedding,
Advanced Topics In Machine Learning Project Report : Low Dimensional Embedding of a Pose Collection Fabian Prada 1 Introduction In this project we present an overview of (1) low dimensional embedding,
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Image retrieval based on region shape similarity
 Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
However, this is not always true! For example, this fails if both A and B are closed and unbounded (find an example).
.") 98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
form are graphed in Cartesian coordinates, and are graphed in Cartesian coordinates.
 Plot 3D Introduction Plot 3D graphs objects in three dimensions. It has five basic modes: 1. Cartesian mode, where surfaces defined by equations of the form are graphed in Cartesian coordinates, 2. cylindrical
Plot 3D Introduction Plot 3D graphs objects in three dimensions. It has five basic modes: 1. Cartesian mode, where surfaces defined by equations of the form are graphed in Cartesian coordinates, 2. cylindrical
Lecture 25: Bezier Subdivision. And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10
 Lecture 25: Bezier Subdivision And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10 1. Divide and Conquer If we are going to build useful
Lecture 25: Bezier Subdivision And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10 1. Divide and Conquer If we are going to build useful
ROTATION INVARIANT TRANSFORMS IN TEXTURE FEATURE EXTRACTION
 ROTATION INVARIANT TRANSFORMS IN TEXTURE FEATURE EXTRACTION GAVLASOVÁ ANDREA, MUDROVÁ MARTINA, PROCHÁZKA ALEŠ Prague Institute of Chemical Technology Department of Computing and Control Engineering Technická
ROTATION INVARIANT TRANSFORMS IN TEXTURE FEATURE EXTRACTION GAVLASOVÁ ANDREA, MUDROVÁ MARTINA, PROCHÁZKA ALEŠ Prague Institute of Chemical Technology Department of Computing and Control Engineering Technická
Curvature Estimation on Smoothed 3-D Meshes
 Curvature Estimation on Smoothed 3-D Meshes Peter Yuen, Nasser Khalili and Farzin Mokhtarian Centre for Vision, Speech and Signal Processing School of Electronic Engineering, Information Technology and
Curvature Estimation on Smoothed 3-D Meshes Peter Yuen, Nasser Khalili and Farzin Mokhtarian Centre for Vision, Speech and Signal Processing School of Electronic Engineering, Information Technology and
9. Three Dimensional Object Representations
 9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
CS 468 Data-driven Shape Analysis. Shape Descriptors
 CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
K-Means Clustering Using Localized Histogram Analysis
 K-Means Clustering Using Localized Histogram Analysis Michael Bryson University of South Carolina, Department of Computer Science Columbia, SC brysonm@cse.sc.edu Abstract. The first step required for many
K-Means Clustering Using Localized Histogram Analysis Michael Bryson University of South Carolina, Department of Computer Science Columbia, SC brysonm@cse.sc.edu Abstract. The first step required for many
Minimum Bounding Boxes for Regular Cross-Polytopes
 Minimum Bounding Boxes for Regular Cross-Polytopes Salman Shahid Michigan State University shahids1@cse.msu.edu Dr. Sakti Pramanik Michigan State University pramanik@cse.msu.edu Dr. Charles B. Owen Michigan
Minimum Bounding Boxes for Regular Cross-Polytopes Salman Shahid Michigan State University shahids1@cse.msu.edu Dr. Sakti Pramanik Michigan State University pramanik@cse.msu.edu Dr. Charles B. Owen Michigan
Non-extendible finite polycycles
 Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Tiled Textures What if Miro Had Painted a Sphere
 Tiled Textures What if Miro Had Painted a Sphere ERGUN AKLEMAN, AVNEET KAUR and LORI GREEN Visualization Sciences Program, Department of Architecture Texas A&M University December 26, 2005 Abstract We
Tiled Textures What if Miro Had Painted a Sphere ERGUN AKLEMAN, AVNEET KAUR and LORI GREEN Visualization Sciences Program, Department of Architecture Texas A&M University December 26, 2005 Abstract We
6. Concluding Remarks
 [8] K. J. Supowit, The relative neighborhood graph with an application to minimum spanning trees, Tech. Rept., Department of Computer Science, University of Illinois, Urbana-Champaign, August 1980, also
[8] K. J. Supowit, The relative neighborhood graph with an application to minimum spanning trees, Tech. Rept., Department of Computer Science, University of Illinois, Urbana-Champaign, August 1980, also
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION INTRODUCTION
 BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
Shape fitting and non convex data analysis
 Shape fitting and non convex data analysis Petra Surynková, Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 186 7 Praha 8, Czech Republic email: petra.surynkova@mff.cuni.cz,
Shape fitting and non convex data analysis Petra Surynková, Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 186 7 Praha 8, Czech Republic email: petra.surynkova@mff.cuni.cz,
Visibility: Finding the Staircase Kernel in Orthogonal Polygons
 Visibility: Finding the Staircase Kernel in Orthogonal Polygons 8 Visibility: Finding the Staircase Kernel in Orthogonal Polygons Tzvetalin S. Vassilev, Nipissing University, Canada Stefan Pape, Nipissing
Visibility: Finding the Staircase Kernel in Orthogonal Polygons 8 Visibility: Finding the Staircase Kernel in Orthogonal Polygons Tzvetalin S. Vassilev, Nipissing University, Canada Stefan Pape, Nipissing
Manufacturing Classification of CAD Models Using Curvature and SVMs
 Manufacturing Classification of CAD Models Using Curvature and SVMs Cheuk Yiu Ip William C. Regli Geometric and Intelligent Computing Laboratory Department of Computer Science, College of Engineering Drexel
Manufacturing Classification of CAD Models Using Curvature and SVMs Cheuk Yiu Ip William C. Regli Geometric and Intelligent Computing Laboratory Department of Computer Science, College of Engineering Drexel
Lecture 15: The subspace topology, Closed sets
 Lecture 15: The subspace topology, Closed sets 1 The Subspace Topology Definition 1.1. Let (X, T) be a topological space with topology T. subset of X, the collection If Y is a T Y = {Y U U T} is a topology
Lecture 15: The subspace topology, Closed sets 1 The Subspace Topology Definition 1.1. Let (X, T) be a topological space with topology T. subset of X, the collection If Y is a T Y = {Y U U T} is a topology
GLOBAL SAMPLING OF IMAGE EDGES. Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas
 GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
And Now From a New Angle Special Angles and Postulates LEARNING GOALS
 And Now From a New Angle Special Angles and Postulates LEARNING GOALS KEY TERMS. In this lesson, you will: Calculate the complement and supplement of an angle. Classify adjacent angles, linear pairs, and
And Now From a New Angle Special Angles and Postulates LEARNING GOALS KEY TERMS. In this lesson, you will: Calculate the complement and supplement of an angle. Classify adjacent angles, linear pairs, and
An Algorithm to Generate Repeating Hyperbolic Patterns
 An Algorithm to Generate Repeating Hyperbolic Patterns Douglas Dunham Department of Computer Science University of innesota, Duluth Duluth, N 5581-3036, USA E-mail: ddunham@d.umn.edu Web Site: http://www.d.umn.edu/
An Algorithm to Generate Repeating Hyperbolic Patterns Douglas Dunham Department of Computer Science University of innesota, Duluth Duluth, N 5581-3036, USA E-mail: ddunham@d.umn.edu Web Site: http://www.d.umn.edu/
Object Classification Using Tripod Operators
 Object Classification Using Tripod Operators David Bonanno, Frank Pipitone, G. Charmaine Gilbreath, Kristen Nock, Carlos A. Font, and Chadwick T. Hawley US Naval Research Laboratory, 4555 Overlook Ave.
Object Classification Using Tripod Operators David Bonanno, Frank Pipitone, G. Charmaine Gilbreath, Kristen Nock, Carlos A. Font, and Chadwick T. Hawley US Naval Research Laboratory, 4555 Overlook Ave.
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
3D Surface Matching and Registration through Shape Images
 3D Surface Matching and Registration through Shape Images Zhaoqiang Lai and Jing Hua Department of Computer Science, Wayne State University, Detroit, MI 48202, USA Abstract. In this paper, we present a
3D Surface Matching and Registration through Shape Images Zhaoqiang Lai and Jing Hua Department of Computer Science, Wayne State University, Detroit, MI 48202, USA Abstract. In this paper, we present a
Generalized barycentric coordinates
 Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Visual Learning and Recognition of 3D Objects from Appearance
 Visual Learning and Recognition of 3D Objects from Appearance (H. Murase and S. Nayar, "Visual Learning and Recognition of 3D Objects from Appearance", International Journal of Computer Vision, vol. 14,
Visual Learning and Recognition of 3D Objects from Appearance (H. Murase and S. Nayar, "Visual Learning and Recognition of 3D Objects from Appearance", International Journal of Computer Vision, vol. 14,
Restricted-Orientation Convexity in Higher-Dimensional Spaces
 Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Fingerprint Classification Using Orientation Field Flow Curves
 Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
Research Article Polygon Morphing and Its Application in Orebody Modeling
 Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
Texture Mapping using Surface Flattening via Multi-Dimensional Scaling
 Texture Mapping using Surface Flattening via Multi-Dimensional Scaling Gil Zigelman Ron Kimmel Department of Computer Science, Technion, Haifa 32000, Israel and Nahum Kiryati Department of Electrical Engineering
Texture Mapping using Surface Flattening via Multi-Dimensional Scaling Gil Zigelman Ron Kimmel Department of Computer Science, Technion, Haifa 32000, Israel and Nahum Kiryati Department of Electrical Engineering
Topological Data Analysis - I. Afra Zomorodian Department of Computer Science Dartmouth College
 Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Modeling High Genus Sculptures Using Multi-Connected Handles and Holes
 Modeling High Genus Sculptures Using Multi-Connected Handles and Holes Vinod Srinivasan, Hernan Molina and Ergun Akleman Department of Architecture Texas A&M University College Station, Texas, USA vinod@viz.tamu.edu
Modeling High Genus Sculptures Using Multi-Connected Handles and Holes Vinod Srinivasan, Hernan Molina and Ergun Akleman Department of Architecture Texas A&M University College Station, Texas, USA vinod@viz.tamu.edu
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Generalized Barycentric Coordinates
 Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics Università della Svizzera italiana, Lugano My life in a nutshell 2009??? Associate Professor @ University of Lugano 1 Generalized
Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics Università della Svizzera italiana, Lugano My life in a nutshell 2009??? Associate Professor @ University of Lugano 1 Generalized
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
A NOTE ON BLOCKING VISIBILITY BETWEEN POINTS
 A NOTE ON BLOCKING VISIBILITY BETWEEN POINTS Adrian Dumitrescu János Pach Géza Tóth Abstract Given a finite point set P in the plane, let b(p) be the smallest number of points q 1,q 2,... not belonging
A NOTE ON BLOCKING VISIBILITY BETWEEN POINTS Adrian Dumitrescu János Pach Géza Tóth Abstract Given a finite point set P in the plane, let b(p) be the smallest number of points q 1,q 2,... not belonging
Independent contact regions for frictional grasps on 3D objects
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Independent contact regions for frictional grasps on 3D objects Máximo A. Roa and Raúl Suárez Institute
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Independent contact regions for frictional grasps on 3D objects Máximo A. Roa and Raúl Suárez Institute
MISCELLANEOUS SHAPES
 MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
Range Image Registration with Edge Detection in Spherical Coordinates
 Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Numerical Optimization
 Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Two Upper Bounds for the Erdős Szekeres Number with Conditions
 Discrete Comput Geom (2013) 49:183 188 DOI 10.1007/s00454-012-9474-9 Two Upper Bounds for the Erdős Szekeres Number with Conditions Florian Strunk Received: 8 July 2011 / Revised: 2 July 2012 / Accepted:
Discrete Comput Geom (2013) 49:183 188 DOI 10.1007/s00454-012-9474-9 Two Upper Bounds for the Erdős Szekeres Number with Conditions Florian Strunk Received: 8 July 2011 / Revised: 2 July 2012 / Accepted:
Calculus III. Math 233 Spring In-term exam April 11th. Suggested solutions
 Calculus III Math Spring 7 In-term exam April th. Suggested solutions This exam contains sixteen problems numbered through 6. Problems 5 are multiple choice problems, which each count 5% of your total
Calculus III Math Spring 7 In-term exam April th. Suggested solutions This exam contains sixteen problems numbered through 6. Problems 5 are multiple choice problems, which each count 5% of your total
[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp
![[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp](/thumbs/82/87020933.jpg "[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp") 4. Applications Meisters [Me] Two-Ears Theorem was motivated by the problem of triangulating a simple polygon. In fact Meisters suggests a greedy, but concise algorithm to achieve this goal, i.e., find
4. Applications Meisters [Me] Two-Ears Theorem was motivated by the problem of triangulating a simple polygon. In fact Meisters suggests a greedy, but concise algorithm to achieve this goal, i.e., find
A Hole-Filling Algorithm for Triangular Meshes. Abstract
 A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material
 Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material Ameesh Makadia Google New York, NY 10011 makadia@google.com Mehmet Ersin Yumer Carnegie Mellon University Pittsburgh, PA 15213
Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material Ameesh Makadia Google New York, NY 10011 makadia@google.com Mehmet Ersin Yumer Carnegie Mellon University Pittsburgh, PA 15213
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
Estimating normal vectors and curvatures by centroid weights
 Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Support Vector Machines
 Support Vector Machines . Importance of SVM SVM is a discriminative method that brings together:. computational learning theory. previously known methods in linear discriminant functions 3. optimization
Support Vector Machines . Importance of SVM SVM is a discriminative method that brings together:. computational learning theory. previously known methods in linear discriminant functions 3. optimization
G 2 Interpolation for Polar Surfaces
 1 G 2 Interpolation for Polar Surfaces Jianzhong Wang 1, Fuhua Cheng 2,3 1 University of Kentucky, jwangf@uky.edu 2 University of Kentucky, cheng@cs.uky.edu 3 National Tsinhua University ABSTRACT In this
1 G 2 Interpolation for Polar Surfaces Jianzhong Wang 1, Fuhua Cheng 2,3 1 University of Kentucky, jwangf@uky.edu 2 University of Kentucky, cheng@cs.uky.edu 3 National Tsinhua University ABSTRACT In this
Geometric Computations for Simulation
 1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
consisting of compact sets. A spline subdivision scheme generates from such
 Spline Subdivision Schemes for Compact Sets with Metric Averages Nira Dyn and Elza Farkhi Abstract. To dene spline subdivision schemes for general compact sets, we use the representation of spline subdivision
Spline Subdivision Schemes for Compact Sets with Metric Averages Nira Dyn and Elza Farkhi Abstract. To dene spline subdivision schemes for general compact sets, we use the representation of spline subdivision
Which n-venn diagrams can be drawn with convex k-gons?
 Which n-venn diagrams can be drawn with convex k-gons? Jeremy Carroll Frank Ruskey Mark Weston Abstract We establish a new lower bound for the number of sides required for the component curves of simple
Which n-venn diagrams can be drawn with convex k-gons? Jeremy Carroll Frank Ruskey Mark Weston Abstract We establish a new lower bound for the number of sides required for the component curves of simple
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Geometry and Gravitation
 Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Support Vector Machines
 Support Vector Machines SVM Discussion Overview. Importance of SVMs. Overview of Mathematical Techniques Employed 3. Margin Geometry 4. SVM Training Methodology 5. Overlapping Distributions 6. Dealing
Support Vector Machines SVM Discussion Overview. Importance of SVMs. Overview of Mathematical Techniques Employed 3. Margin Geometry 4. SVM Training Methodology 5. Overlapping Distributions 6. Dealing
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Brain Surface Conformal Spherical Mapping
 Brain Surface Conformal Spherical Mapping Min Zhang Department of Industrial Engineering, Arizona State University mzhang33@asu.edu Abstract It is well known and proved that any genus zero surface can
Brain Surface Conformal Spherical Mapping Min Zhang Department of Industrial Engineering, Arizona State University mzhang33@asu.edu Abstract It is well known and proved that any genus zero surface can
FFTs in Graphics and Vision. Invariance of Shape Descriptors
 FFTs in Graphics and Vision Invariance of Shape Descriptors 1 Outline Math Overview Translation and Rotation Invariance The 0 th Order Frequency Component Shape Descriptors Invariance 2 Translation Invariance
FFTs in Graphics and Vision Invariance of Shape Descriptors 1 Outline Math Overview Translation and Rotation Invariance The 0 th Order Frequency Component Shape Descriptors Invariance 2 Translation Invariance
Accurate and Dense Wide-Baseline Stereo Matching Using SW-POC
 Accurate and Dense Wide-Baseline Stereo Matching Using SW-POC Shuji Sakai, Koichi Ito, Takafumi Aoki Graduate School of Information Sciences, Tohoku University, Sendai, 980 8579, Japan Email: sakai@aoki.ecei.tohoku.ac.jp
Accurate and Dense Wide-Baseline Stereo Matching Using SW-POC Shuji Sakai, Koichi Ito, Takafumi Aoki Graduate School of Information Sciences, Tohoku University, Sendai, 980 8579, Japan Email: sakai@aoki.ecei.tohoku.ac.jp
66 III Complexes. R p (r) }.
 }.") 66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
Manifold T-spline. Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2. Geometric Modeling and Processing 2006
 Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2 1 School of Computer Engineering Nanyang Technological University, Singapore 2 Center for Visual Computing (CVC) Stony Brook University,
Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2 1 School of Computer Engineering Nanyang Technological University, Singapore 2 Center for Visual Computing (CVC) Stony Brook University,
Mathematics Background
 Finding Area and Distance Students work in this Unit develops a fundamentally important relationship connecting geometry and algebra: the Pythagorean Theorem. The presentation of ideas in the Unit reflects
Finding Area and Distance Students work in this Unit develops a fundamentally important relationship connecting geometry and algebra: the Pythagorean Theorem. The presentation of ideas in the Unit reflects
Snakes reparameterization for noisy images segmentation and targets tracking
 Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
CMU-Q Lecture 9: Optimization II: Constrained,Unconstrained Optimization Convex optimization. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 9: Optimization II: Constrained,Unconstrained Optimization Convex optimization Teacher: Gianni A. Di Caro GLOBAL FUNCTION OPTIMIZATION Find the global maximum of the function f x (and
CMU-Q 15-381 Lecture 9: Optimization II: Constrained,Unconstrained Optimization Convex optimization Teacher: Gianni A. Di Caro GLOBAL FUNCTION OPTIMIZATION Find the global maximum of the function f x (and
Improved Results on Geometric Hitting Set Problems
 Improved Results on Geometric Hitting Set Problems Nabil H. Mustafa nabil@lums.edu.pk Saurabh Ray saurabh@cs.uni-sb.de Abstract We consider the problem of computing minimum geometric hitting sets in which,
Improved Results on Geometric Hitting Set Problems Nabil H. Mustafa nabil@lums.edu.pk Saurabh Ray saurabh@cs.uni-sb.de Abstract We consider the problem of computing minimum geometric hitting sets in which,
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS. Have you ever wondered why a manhole cover is in the shape of a circle? This
 CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
Incomplete two-manifold mesh-based tool path generation
 Int J Adv Manuf Technol (2006) 27: 797 803 DOI 10.1007/s00170-004-2239-8 ORIGINAL ARTICLE Dong-Yoon Lee Su-Jin Kim Hyun-Chul Kim Sung-Gun Lee Min-Yang Yang Incomplete two-manifold mesh-based tool path
Int J Adv Manuf Technol (2006) 27: 797 803 DOI 10.1007/s00170-004-2239-8 ORIGINAL ARTICLE Dong-Yoon Lee Su-Jin Kim Hyun-Chul Kim Sung-Gun Lee Min-Yang Yang Incomplete two-manifold mesh-based tool path
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
Slops and Distances for Regular Shape Image Recognition
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 5.258 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 5.258 IJCSMC,
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Advanced Operations Research Techniques IE316. Quiz 1 Review. Dr. Ted Ralphs
 Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
Advanced Operations Research Techniques IE316 Quiz 1 Review Dr. Ted Ralphs IE316 Quiz 1 Review 1 Reading for The Quiz Material covered in detail in lecture. 1.1, 1.4, 2.1-2.6, 3.1-3.3, 3.5 Background material
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI. February 7, 2009 Second Round Three Hours
 UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
Approximating Polygonal Objects by Deformable Smooth Surfaces
 Approximating Polygonal Objects by Deformable Smooth Surfaces Ho-lun Cheng and Tony Tan School of Computing, National University of Singapore hcheng,tantony@comp.nus.edu.sg Abstract. We propose a method
Approximating Polygonal Objects by Deformable Smooth Surfaces Ho-lun Cheng and Tony Tan School of Computing, National University of Singapore hcheng,tantony@comp.nus.edu.sg Abstract. We propose a method
Recognizing Objects by Matching Oriented Points
 Submitted to IEEE Computer Vision and Pattern Recognition, CVPR 97 Recognizing Objects by Matching Oriented Points Andrew Edie Johnson and Martial Hebert The Robotics Institute, Carnegie Mellon University
Submitted to IEEE Computer Vision and Pattern Recognition, CVPR 97 Recognizing Objects by Matching Oriented Points Andrew Edie Johnson and Martial Hebert The Robotics Institute, Carnegie Mellon University
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
G 6i try. On the Number of Minimal 1-Steiner Trees* Discrete Comput Geom 12:29-34 (1994)
") Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
Discrete Comput Geom 12:29-34 (1994) G 6i try 9 1994 Springer-Verlag New York Inc. On the Number of Minimal 1-Steiner Trees* B. Aronov, 1 M. Bern, 2 and D. Eppstein 3 Computer Science Department, Polytechnic
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud
 , pp.43-47 http://dx.doi.org/10.14257/astl.2014.67.11 Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud Ashok Kumar Patil, Seong Sill Park, Pavitra Holi,
, pp.43-47 http://dx.doi.org/10.14257/astl.2014.67.11 Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud Ashok Kumar Patil, Seong Sill Park, Pavitra Holi,