Searching for Shortest Path in A Large, Sparse Graph under Memory Limitation: A Successive Mixed Bidirectional Search Method
|
|
|
- Myron Warren
- 5 years ago
- Views:
Transcription
1 Searching for Shortest Path in A Large, Sparse Graph under Memory Limitation: A Successive Mixed Bidirectional Search Method Xugang Ye Department of Applied Mathematics and Statistics, The Johns Hopkins University
2 Shortest t Path Problems: Past Results and New Challenges Classical Problems Finite Graphs, Networks One-to-One Shortest Path Problem One-to-All Shortest Path Problem All Pairs Shortest Path Problem Algorithms Label Setting Algorithms (e.g., Dijkstra s Algorithm) Label Correcting Algorithms (e.g., Bellman-Ford Algorithm) Auction Algorithms (e.g., Bertsekas Bidding Algorithm)


3 Shortest t Path Problems: Past Results and New Challenges (Contd.) New Challenges Large/Infinite Graphs/Networks Memory Limitation Nondeterministic Arcs/Edges Dynamic Graphs/Networks
4 Problem Statement We consider a directed, positively weighted graph denoted as D = (s, t, V, A, W), where s is the starting node, t is the destination node, V is the set of other nodes, A is the set of arcs, and W: A R + represents the weight function that satisfies δ < W (u, v) < + for any (u, v) A, where δ > 0 is a positive constant. Definition. A directed, positively weighted graph D = (s, t, V, A, W) is called locally finite if for each node u V {s, t}, the set N u ={v (u, v) A or (v, u) A} is finite. Furthermore, D is called locally very sparse if there exists a small positive integer, say B, such that the size of N u, denoted as N u, is bounded above by B for every u V {s, t}.
5 Problem Statement (Contd.) We assume the graph D = (s, t, V, A, W, B) is locally very sparse We only consider directed path. For any two nodes u, v, we denote dist(u, v) as the distance from u to v. If there is no u-v path, we define dist(u, v) = + ; otherwise, we define dist(u, v) to be the length of a shortest u-v path. Goal: Find a shortest s-t path in D It is easy to see that if there is at least one s-t path, then there is at least one shortest s-t path.
6 Methods For Large Scale Problems Classical Best-First Search Restricted by the memory limit Depth-first Search Only applicable to the graphs with very few cycles Classical Best-First Search + External Storage Low efficiency in duplicate detection Frontier Search (FS) + Divide-and-Conquer Bidirectional Frontier Search (DCBFS) Very good method for large, sparse graph Frontier Search (FS) + Divide-and-Conquer Unidirectional Frontier Search (DCUFS) Very good method for large, sparse graph, but need good heuristic Successive Mixed Bidirectional Search An alternative to the divide-and-conquer technique, and advantageous in utilizing external storage
7 Dijkstra s Algorithm Definition. An algorithm for finding a shortest s-t path in D is called complete if it can find an s-t path as long as there exists one in D. Definition. A complete algorithm for finding a shortest s-t path in D is called optimal if it can find a shortest s-t path as long as there exists an s-t path in D. Dijkstra s Algorithm in Best-First Search Version (Algorithm 1)
8 Dijkstra s Algorithm (Contd.)
9 Dijkstra s Algorithm (Contd.) Well Known Properties of Dijkstra s Algorithm If the algorithm terminates at its Step 2, then t is unreachable from s. Dijkstra s algorithm in best-first search version is complete. Dijkstra s algorithm in best-first search version is optimal.
10 Dijkstra s Algorithm (Contd.) Supplemental Properties of Dijkstra s Algorithm Theorem Let P: v 1 (= s) ~ v 2 ~ ~ v k (= t) be a shortest s-t path. 1 2 k At any time when t E φ, there exists an index i such that 1 i < k, v h E for any 1 h i, and v i+1 O. Moreover, d(v h ) = dist(s, v h ) = L(P(s, v h )) for any 1 h i+1, where P(s, v h ) denotes the subpath of P from s to v h. Monotonicity 1 Theorem At any time when E φ and O φ, for any u E and v O, dist(s, u) = d(u) dist(s, v) d(v). Monotonicity 2
11 Frontier Search: Algorithm Idea: to reduce the memory requirement by not storing the Closed list Frontier Dijkstra s Algorithm (Algorithm 2)
12
13 Frontier Search: Theoretical Results Equivalence Relation (Korf and Zhang, 2005) Theorem If a node u is selected in Step 3 of Algorithm 2, after u is closed in Step 6, it will never be reopened. Equivalence 1 Theorem With the same tie-breaking rule, during the same iteration, Algorithm 1 and Algorithm 2 select the same node with the same d label and the same predecessor. Equivalence 2
14 Divide-and-Conquer Technique DCBFS via Graphic Illustration s u 1 u 2 u 1 t s u 3 t Find first intermediate node Find second and third intermediate node Drawback: the structure of the algorithm is complicated, and there are considerably many nodes that are visited multiple times
15 Divide-and-Conquer Technique (Contd.) One Pass termination condition for the bidirectional FS where s t c min d ( x ) + min d ( y ) x O s y O d s (v) represents the distance label of v in the forward search d t (v) represents the distance label of v in the backward search c equals the length of the shortest s-t path found so far Drawback: the quantity c may reach the global minimum much earlier than this event is detected t
16 Solve the Technical Difficulties Solution of Korf et al. Divide-and-Conquer Unidirectional Frontier Search (DCUFS) Midline heuristics Our Solution Successive Mixed Bidirectional Search
17 Mixed Bidirectional Search Idea Find a nontrivial path P: v 1 (= s) ~ v 2 ~ ~ v k ( s) such that P is part of a shortest s-t path in D. Technical detail A forward version of Algorithm 1 starts from s and proceeds as long as the allocated memory allows; a backward version of Algorithm 2 starts from t and proceeds to meet the forward search. One pass termination condition The backward search first selects a node that has been closed by the forward one.
18 Mixed Bidirectional Search (Contd.) Mixed Bidirectional Search via Graphic Illustration s u u* t
19 Mixed Bidirectional Search: Algorithm
20
21
22 Mixed Bidirectional Search: Correctness Theorem If there exists an s-t path in D, then Algorithm 3 must be able to terminate within finite steps. Upon termination, it will return a path P, which is a part of a shortest s-t path and L(P) >δ. Sketch of Proof. 1. Algorithm 3 will terminate within finite steps. It either terminates with t E s at Step 7, or it will find u at Step 9 and jumps to Step In the first scenario, an entire shortest s-t path is found; in the second scenario, a part of a shortest s-t path is found. * s t 3. Show that u = arg min( d ( v) + d ( v)) lies on a shortest s-t path. v E 4. Look at the case u * s and the case u * = s. s O t
23 Idea Successive Mixed Bidirectional Search: Algorithm Apply algorithm 3 successively. The resulting algorithm is named Algorithm 4.
24 Successive Mixed Bidirectional Search: Correctness Theorem Algorithm 4 is both complete and optimal, i.e. if there exists an s-t path in D, then Algorithm 4 will return a shortest s-t path after finite number of iterations. Sketch of Proof. 1. Note that dist(s,t) < Note that L(P k ) = dist(s k, t) dist(s k+1, t). k i = 1 K i = 1 3. Note that k δ L( P ) = dist(s, t) dist(s k+1, t) dist(s, t). 4. Note that L(P) = L( Pi ) = dist(s, t), where s K+1 = t. i
25 Successive Mixed Bidirectional Search: Acceleration Idea Reduce the repeated node expansions incurred in overlapping backward searches. Technical detail 1. Initially apply a full backward FS as stated as Algorithm 2. During the lifetime of the full backward FS, strategically save some intermediate fronts into the external storage device (e.g., hard drive). 2. During one pass of mixed bidirectional search, load the saved front as needed and d move this front when necessary. 3. Select appropriate heuristic to determine the fronts to be saved.

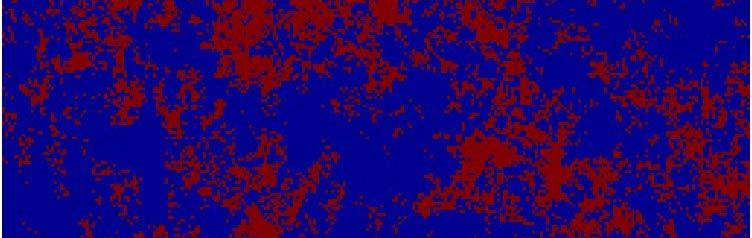


26 Preliminary Numerical Tests The test graph in local view (left) and global view (right)


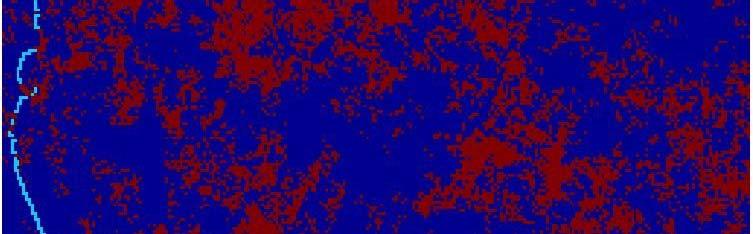



27 Preliminary Numerical Tests (Contd.) Visualization of a test on Algorithm 4 (left: the first partial solution path; right: the third solution path)




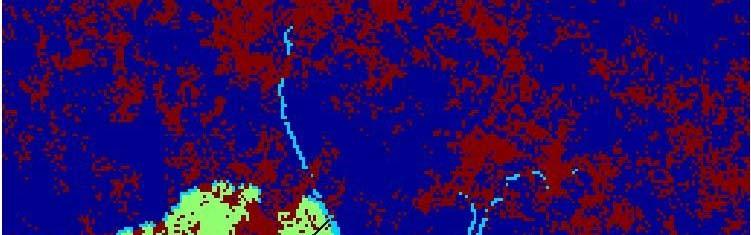
28 Preliminary Numerical Tests (Contd.) Visualization of a test on Algorithm 4 (Contd., left: the entire solution path; right: the CPU time for finding each partial solution path)




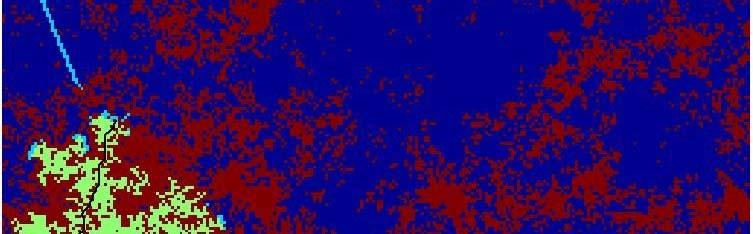
29 Preliminary Numerical Tests (Contd.) Visualization of a test on accelerated Algorithm 4 (left: the effective backward fronts and the entire solution path; right: the CPU time for the initial full backward FS and for finding each partial solution path)
30 Preliminary Numerical Tests (Contd.) Performance summary of five algorithms (algorithms are coded with Matlab 7.1 and the programs are executed in a PC with Intel dual core CPU T2050 at 1.60 GHz and 1.0 G RAM.)
31 Conclusions and Perspectives Our method is an alternative to the divide-and-conquer technique If we emphasize more on the issue of memory saving and want to attack extremely large problems, then the divide-and-conquer technique is probably a better option. If we have considerably large memory and are more focused on the computational efficiency, then our method is more advantageous. Our algorithm has a simpler structure than a divide-and-conquer algorithm. We suggest investigating the possibility of designing a mixed bidirectional A * algorithm and then consider how to successively apply it.
32 Questions? Thanks very much!
Searching for Shortest Path in A Large, Sparse Graph under Memory. Limitation: A Successive Mixed Bidirectional Search Method
 Searching for Shortest Path in A Large, Sparse Graph under Memory Limitation: A Successive Mixed Bidirectional Search Method Xugang Ye 1, Anhua Lin 2, Shih-Ping Han 1 August 2007 Abstract The problem of
Searching for Shortest Path in A Large, Sparse Graph under Memory Limitation: A Successive Mixed Bidirectional Search Method Xugang Ye 1, Anhua Lin 2, Shih-Ping Han 1 August 2007 Abstract The problem of
Single Source Shortest Path
 Single Source Shortest Path A directed graph G = (V, E) and a pair of nodes s, d is given. The edges have a real-valued weight W i. This time we are looking for the weight and the shortest path from s
Single Source Shortest Path A directed graph G = (V, E) and a pair of nodes s, d is given. The edges have a real-valued weight W i. This time we are looking for the weight and the shortest path from s
Lecture 3: Totally Unimodularity and Network Flows
 Lecture 3: Totally Unimodularity and Network Flows (3 units) Outline Properties of Easy Problems Totally Unimodular Matrix Minimum Cost Network Flows Dijkstra Algorithm for Shortest Path Problem Ford-Fulkerson
Lecture 3: Totally Unimodularity and Network Flows (3 units) Outline Properties of Easy Problems Totally Unimodular Matrix Minimum Cost Network Flows Dijkstra Algorithm for Shortest Path Problem Ford-Fulkerson
1 Dijkstra s Algorithm
 Lecture 11 Dijkstra s Algorithm Scribes: Himanshu Bhandoh (2015), Virginia Williams, and Date: November 1, 2017 Anthony Kim (2016), G. Valiant (2017), M. Wootters (2017) (Adapted from Virginia Williams
Lecture 11 Dijkstra s Algorithm Scribes: Himanshu Bhandoh (2015), Virginia Williams, and Date: November 1, 2017 Anthony Kim (2016), G. Valiant (2017), M. Wootters (2017) (Adapted from Virginia Williams
Algorithms for Integer Programming
 Algorithms for Integer Programming Laura Galli November 9, 2016 Unlike linear programming problems, integer programming problems are very difficult to solve. In fact, no efficient general algorithm is
Algorithms for Integer Programming Laura Galli November 9, 2016 Unlike linear programming problems, integer programming problems are very difficult to solve. In fact, no efficient general algorithm is
Breadth-first heuristic search. Paper by Rong Zhou, Eric A. Hansen Presentation by Salomé Simon
 Breadth-first heuristic search Paper by Rong Zhou, Eric A. Hansen Presentation by Salomé Simon Breadth-first tree search 1 2 3 4 5 6 7 Used for search problems with uniform edge cost Prerequisite for presented
Breadth-first heuristic search Paper by Rong Zhou, Eric A. Hansen Presentation by Salomé Simon Breadth-first tree search 1 2 3 4 5 6 7 Used for search problems with uniform edge cost Prerequisite for presented
Highway Dimension and Provably Efficient Shortest Paths Algorithms
 Highway Dimension and Provably Efficient Shortest Paths Algorithms Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Ittai Abraham, Amos Fiat, and Renato
Highway Dimension and Provably Efficient Shortest Paths Algorithms Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Ittai Abraham, Amos Fiat, and Renato
CMSC351 - Fall 2014, Homework #6
 CMSC351 - Fall 2014, Homework #6 Due: December 12th at the start of class PRINT Name: Grades depend on neatness and clarity. Write your answers with enough detail about your approach and concepts used,
CMSC351 - Fall 2014, Homework #6 Due: December 12th at the start of class PRINT Name: Grades depend on neatness and clarity. Write your answers with enough detail about your approach and concepts used,
A CSP Search Algorithm with Reduced Branching Factor
 A CSP Search Algorithm with Reduced Branching Factor Igor Razgon and Amnon Meisels Department of Computer Science, Ben-Gurion University of the Negev, Beer-Sheva, 84-105, Israel {irazgon,am}@cs.bgu.ac.il
A CSP Search Algorithm with Reduced Branching Factor Igor Razgon and Amnon Meisels Department of Computer Science, Ben-Gurion University of the Negev, Beer-Sheva, 84-105, Israel {irazgon,am}@cs.bgu.ac.il
1 More on the Bellman-Ford Algorithm
 CS161 Lecture 12 Shortest Path and Dynamic Programming Algorithms Scribe by: Eric Huang (2015), Anthony Kim (2016), M. Wootters (2017) Date: May 15, 2017 1 More on the Bellman-Ford Algorithm We didn t
CS161 Lecture 12 Shortest Path and Dynamic Programming Algorithms Scribe by: Eric Huang (2015), Anthony Kim (2016), M. Wootters (2017) Date: May 15, 2017 1 More on the Bellman-Ford Algorithm We didn t
4/8/11. Single-Source Shortest Path. Shortest Paths. Shortest Paths. Chapter 24
 /8/11 Single-Source Shortest Path Chapter 1 Shortest Paths Finding the shortest path between two nodes comes up in many applications o Transportation problems o Motion planning o Communication problems
/8/11 Single-Source Shortest Path Chapter 1 Shortest Paths Finding the shortest path between two nodes comes up in many applications o Transportation problems o Motion planning o Communication problems
Search: Advanced Topics and Conclusion
 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 24, 2007 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview 1 Recap 2 Branch & Bound 3 A
Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 24, 2007 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview 1 Recap 2 Branch & Bound 3 A
Shortest path problems
 Next... Shortest path problems Single-source shortest paths in weighted graphs Shortest-Path Problems Properties of Shortest Paths, Relaxation Dijkstra s Algorithm Bellman-Ford Algorithm Shortest-Paths
Next... Shortest path problems Single-source shortest paths in weighted graphs Shortest-Path Problems Properties of Shortest Paths, Relaxation Dijkstra s Algorithm Bellman-Ford Algorithm Shortest-Paths
Chapter S:V. V. Formal Properties of A*
 Chapter S:V V. Formal Properties of A* Properties of Search Space Graphs Auxiliary Concepts Roadmap Completeness of A* Admissibility of A* Efficiency of A* Monotone Heuristic Functions S:V-1 Formal Properties
Chapter S:V V. Formal Properties of A* Properties of Search Space Graphs Auxiliary Concepts Roadmap Completeness of A* Admissibility of A* Efficiency of A* Monotone Heuristic Functions S:V-1 Formal Properties
x ji = s i, i N, (1.1)
") Dual Ascent Methods. DUAL ASCENT In this chapter we focus on the minimum cost flow problem minimize subject to (i,j) A {j (i,j) A} a ij x ij x ij {j (j,i) A} (MCF) x ji = s i, i N, (.) b ij x ij c ij,
Dual Ascent Methods. DUAL ASCENT In this chapter we focus on the minimum cost flow problem minimize subject to (i,j) A {j (i,j) A} a ij x ij x ij {j (j,i) A} (MCF) x ji = s i, i N, (.) b ij x ij c ij,
Shortest Path Problem
 Shortest Path Problem CLRS Chapters 24.1 3, 24.5, 25.2 Shortest path problem Shortest path problem (and variants) Properties of shortest paths Algorithmic framework Bellman-Ford algorithm Shortest paths
Shortest Path Problem CLRS Chapters 24.1 3, 24.5, 25.2 Shortest path problem Shortest path problem (and variants) Properties of shortest paths Algorithmic framework Bellman-Ford algorithm Shortest paths
Algorithms for Data Science
 Algorithms for Data Science CSOR W4246 Eleni Drinea Computer Science Department Columbia University Shortest paths in weighted graphs (Bellman-Ford, Floyd-Warshall) Outline 1 Shortest paths in graphs with
Algorithms for Data Science CSOR W4246 Eleni Drinea Computer Science Department Columbia University Shortest paths in weighted graphs (Bellman-Ford, Floyd-Warshall) Outline 1 Shortest paths in graphs with
Artificial Intelligence
 Artificial Intelligence Shortest Path Problem G. Guérard Department of Nouvelles Energies Ecole Supérieur d Ingénieurs Léonard de Vinci Lecture 3 GG A.I. 1/42 Outline 1 The Shortest Path Problem Introduction
Artificial Intelligence Shortest Path Problem G. Guérard Department of Nouvelles Energies Ecole Supérieur d Ingénieurs Léonard de Vinci Lecture 3 GG A.I. 1/42 Outline 1 The Shortest Path Problem Introduction
TIE Graph algorithms
 TIE-20106 1 1 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
TIE-20106 1 1 Graph algorithms This chapter discusses the data structure that is a collection of points (called nodes or vertices) and connections between them (called edges or arcs) a graph. The common
EE266 Homework 8 Solutions
 EE266, Spring 2014-15 Professor S. Lall EE266 Homework 8 Solutions 1. Dijkstra s Algorithm. In this problem, you will write an implementation of Dijkstra s algorithm, and use it to find the shortest path
EE266, Spring 2014-15 Professor S. Lall EE266 Homework 8 Solutions 1. Dijkstra s Algorithm. In this problem, you will write an implementation of Dijkstra s algorithm, and use it to find the shortest path
1. Lecture notes on bipartite matching February 4th,
 1. Lecture notes on bipartite matching February 4th, 2015 6 1.1.1 Hall s Theorem Hall s theorem gives a necessary and sufficient condition for a bipartite graph to have a matching which saturates (or matches)
1. Lecture notes on bipartite matching February 4th, 2015 6 1.1.1 Hall s Theorem Hall s theorem gives a necessary and sufficient condition for a bipartite graph to have a matching which saturates (or matches)
Two-Levels-Greedy: a generalization of Dijkstra s shortest path algorithm
 Electronic Notes in Discrete Mathematics 17 (2004) 81 86 www.elsevier.com/locate/endm Two-Levels-Greedy: a generalization of Dijkstra s shortest path algorithm Domenico Cantone 1 Simone Faro 2 Department
Electronic Notes in Discrete Mathematics 17 (2004) 81 86 www.elsevier.com/locate/endm Two-Levels-Greedy: a generalization of Dijkstra s shortest path algorithm Domenico Cantone 1 Simone Faro 2 Department
09 B: Graph Algorithms II
 Correctness and Complexity of 09 B: Graph Algorithms II CS1102S: Data Structures and Algorithms Martin Henz March 19, 2010 Generated on Thursday 18 th March, 2010, 00:20 CS1102S: Data Structures and Algorithms
Correctness and Complexity of 09 B: Graph Algorithms II CS1102S: Data Structures and Algorithms Martin Henz March 19, 2010 Generated on Thursday 18 th March, 2010, 00:20 CS1102S: Data Structures and Algorithms
Breadth-first heuristic search
 Artificial Intelligence 170 (2006) 385 408 www.elsevier.com/locate/artint Breadth-first heuristic search Rong Zhou, Eric A. Hansen Department of Computer Science and Engineering, Mississippi State University,
Artificial Intelligence 170 (2006) 385 408 www.elsevier.com/locate/artint Breadth-first heuristic search Rong Zhou, Eric A. Hansen Department of Computer Science and Engineering, Mississippi State University,
The Shortest Path Problem. The Shortest Path Problem. Mathematical Model. Integer Programming Formulation
 The Shortest Path Problem jla,jc@imm.dtu.dk Department of Management Engineering Technical University of Denmark The Shortest Path Problem Given a directed network G = (V,E,w) for which the underlying
The Shortest Path Problem jla,jc@imm.dtu.dk Department of Management Engineering Technical University of Denmark The Shortest Path Problem Given a directed network G = (V,E,w) for which the underlying
Algorithms for Data Science
 Algorithms for Data Science CSOR W4246 Eleni Drinea Computer Science Department Columbia University Thursday, October 1, 2015 Outline 1 Recap 2 Shortest paths in graphs with non-negative edge weights (Dijkstra
Algorithms for Data Science CSOR W4246 Eleni Drinea Computer Science Department Columbia University Thursday, October 1, 2015 Outline 1 Recap 2 Shortest paths in graphs with non-negative edge weights (Dijkstra
Computer Science & Engineering 423/823 Design and Analysis of Algorithms
 Computer Science & Engineering 423/823 Design and Analysis of Algorithms Lecture 07 Single-Source Shortest Paths (Chapter 24) Stephen Scott and Vinodchandran N. Variyam sscott@cse.unl.edu 1/36 Introduction
Computer Science & Engineering 423/823 Design and Analysis of Algorithms Lecture 07 Single-Source Shortest Paths (Chapter 24) Stephen Scott and Vinodchandran N. Variyam sscott@cse.unl.edu 1/36 Introduction
ME/CS 132: Advanced Robotics: Navigation and Vision
 ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
Lecture 6: Linear Programming for Sparsest Cut
 Lecture 6: Linear Programming for Sparsest Cut Sparsest Cut and SOS The SOS hierarchy captures the algorithms for sparsest cut, but they were discovered directly without thinking about SOS (and this is
Lecture 6: Linear Programming for Sparsest Cut Sparsest Cut and SOS The SOS hierarchy captures the algorithms for sparsest cut, but they were discovered directly without thinking about SOS (and this is
Mathematics for Decision Making: An Introduction. Lecture 18
 Mathematics for Decision Making: An Introduction Lecture 18 Matthias Köppe UC Davis, Mathematics March 5, 2009 18 1 Augmenting Circuit Algorithm for Min Cost Flow Augmenting Circuit Algorithm, Kantoróvich
Mathematics for Decision Making: An Introduction Lecture 18 Matthias Köppe UC Davis, Mathematics March 5, 2009 18 1 Augmenting Circuit Algorithm for Min Cost Flow Augmenting Circuit Algorithm, Kantoróvich
DEGENERACY AND THE FUNDAMENTAL THEOREM
 DEGENERACY AND THE FUNDAMENTAL THEOREM The Standard Simplex Method in Matrix Notation: we start with the standard form of the linear program in matrix notation: (SLP) m n we assume (SLP) is feasible, and
DEGENERACY AND THE FUNDAMENTAL THEOREM The Standard Simplex Method in Matrix Notation: we start with the standard form of the linear program in matrix notation: (SLP) m n we assume (SLP) is feasible, and
CS420/520 Algorithm Analysis Spring 2009 Lecture 14
 CS420/520 Algorithm Analysis Spring 2009 Lecture 14 "A Computational Analysis of Alternative Algorithms for Labeling Techniques for Finding Shortest Path Trees", Dial, Glover, Karney, and Klingman, Networks
CS420/520 Algorithm Analysis Spring 2009 Lecture 14 "A Computational Analysis of Alternative Algorithms for Labeling Techniques for Finding Shortest Path Trees", Dial, Glover, Karney, and Klingman, Networks
Chapter 24. Shortest path problems. Chapter 24. Shortest path problems. 24. Various shortest path problems. Chapter 24. Shortest path problems
 Chapter 24. Shortest path problems We are given a directed graph G = (V,E) with each directed edge (u,v) E having a weight, also called a length, w(u,v) that may or may not be negative. A shortest path
Chapter 24. Shortest path problems We are given a directed graph G = (V,E) with each directed edge (u,v) E having a weight, also called a length, w(u,v) that may or may not be negative. A shortest path
A COMPUTATIONAL STUDY OF THE CONSTRAINED MAXIMUM FLOW PROBLEM
 COMPUTTIONL STUDY OF THE CONSTRINED MXIMUM FLOW PROBLEM Cenk Çalışkan, Woodbury School of Business, Utah Valley University, 800 W. University Pkwy, Orem, UT 84058, (801) 863-6487, cenk.caliskan@uvu.edu
COMPUTTIONL STUDY OF THE CONSTRINED MXIMUM FLOW PROBLEM Cenk Çalışkan, Woodbury School of Business, Utah Valley University, 800 W. University Pkwy, Orem, UT 84058, (801) 863-6487, cenk.caliskan@uvu.edu
Parallel Breadth First Search
 CSE341T/CSE549T 11/03/2014 Lecture 18 Parallel Breadth First Search Today, we will look at a basic graph algorithm, breadth first search (BFS). BFS can be applied to solve a variety of problems including:
CSE341T/CSE549T 11/03/2014 Lecture 18 Parallel Breadth First Search Today, we will look at a basic graph algorithm, breadth first search (BFS). BFS can be applied to solve a variety of problems including:
Outline: Finish uncapacitated simplex method Negative cost cycle algorithm The max-flow problem Max-flow min-cut theorem
 Outline: Finish uncapacitated simplex method Negative cost cycle algorithm The max-flow problem Max-flow min-cut theorem Uncapacitated Networks: Basic primal and dual solutions Flow conservation constraints
Outline: Finish uncapacitated simplex method Negative cost cycle algorithm The max-flow problem Max-flow min-cut theorem Uncapacitated Networks: Basic primal and dual solutions Flow conservation constraints
Parallel graph decompositions using random shifts
 Parallel graph decompositions using random shifts Gary L. Miller, Richard Peng, Shen Chen Xu Presenter: Jessica Shi 6.886 Algorithm Engineering Spring 2019, MIT Introduction Introduction Jessica Shi Parallel
Parallel graph decompositions using random shifts Gary L. Miller, Richard Peng, Shen Chen Xu Presenter: Jessica Shi 6.886 Algorithm Engineering Spring 2019, MIT Introduction Introduction Jessica Shi Parallel
15.082J and 6.855J. Lagrangian Relaxation 2 Algorithms Application to LPs
 15.082J and 6.855J Lagrangian Relaxation 2 Algorithms Application to LPs 1 The Constrained Shortest Path Problem (1,10) 2 (1,1) 4 (2,3) (1,7) 1 (10,3) (1,2) (10,1) (5,7) 3 (12,3) 5 (2,2) 6 Find the shortest
15.082J and 6.855J Lagrangian Relaxation 2 Algorithms Application to LPs 1 The Constrained Shortest Path Problem (1,10) 2 (1,1) 4 (2,3) (1,7) 1 (10,3) (1,2) (10,1) (5,7) 3 (12,3) 5 (2,2) 6 Find the shortest
Lecture #7. 1 Introduction. 2 Dijkstra s Correctness. COMPSCI 330: Design and Analysis of Algorithms 9/16/2014
 COMPSCI 330: Design and Analysis of Algorithms 9/16/2014 Lecturer: Debmalya Panigrahi Lecture #7 Scribe: Nat Kell 1 Introduction In this lecture, we will further examine shortest path algorithms. We will
COMPSCI 330: Design and Analysis of Algorithms 9/16/2014 Lecturer: Debmalya Panigrahi Lecture #7 Scribe: Nat Kell 1 Introduction In this lecture, we will further examine shortest path algorithms. We will
Reach for A : an Efficient Point-to-Point Shortest Path Algorithm
 Reach for A : an Efficient Point-to-Point Shortest Path Algorithm Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Haim Kaplan and Renato Werneck Einstein
Reach for A : an Efficient Point-to-Point Shortest Path Algorithm Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Haim Kaplan and Renato Werneck Einstein
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Heap-on-Top Priority Queues. March Abstract. We introduce the heap-on-top (hot) priority queue data structure that combines the
 priority queue data structure that combines the") Heap-on-Top Priority Queues Boris V. Cherkassky Central Economics and Mathematics Institute Krasikova St. 32 117418, Moscow, Russia cher@cemi.msk.su Andrew V. Goldberg NEC Research Institute 4 Independence
Heap-on-Top Priority Queues Boris V. Cherkassky Central Economics and Mathematics Institute Krasikova St. 32 117418, Moscow, Russia cher@cemi.msk.su Andrew V. Goldberg NEC Research Institute 4 Independence
Lecture and notes by: Sarah Fletcher and Michael Xu November 3rd, Multicommodity Flow
 Multicommodity Flow 1 Introduction Suppose we have a company with a factory s and a warehouse t. The quantity of goods that they can ship from the factory to the warehouse in a given time period is limited
Multicommodity Flow 1 Introduction Suppose we have a company with a factory s and a warehouse t. The quantity of goods that they can ship from the factory to the warehouse in a given time period is limited
CS 3410 Ch 14 Graphs and Paths
 CS 3410 Ch 14 Graphs and Paths Sections 14.1-14.3 Pages 527-552 Exercises 1,2,5,7-9 14.1 Definitions 1. A vertex (node) and an edge are the basic building blocks of a graph. Two vertices, (, ) may be connected
CS 3410 Ch 14 Graphs and Paths Sections 14.1-14.3 Pages 527-552 Exercises 1,2,5,7-9 14.1 Definitions 1. A vertex (node) and an edge are the basic building blocks of a graph. Two vertices, (, ) may be connected
Description of The Algorithm
 Description of The Algorithm Dijkstra s algorithm works by solving the sub-problem k, which computes the shortest path from the source to vertices among the k closest vertices to the source. For the dijkstra
Description of The Algorithm Dijkstra s algorithm works by solving the sub-problem k, which computes the shortest path from the source to vertices among the k closest vertices to the source. For the dijkstra
Copyright 2007 Pearson Addison-Wesley. All rights reserved. A. Levitin Introduction to the Design & Analysis of Algorithms, 2 nd ed., Ch.
 Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
Iterative Improvement Algorithm design technique for solving optimization problems Start with a feasible solution Repeat the following step until no improvement can be found: change the current feasible
LECTURES 3 and 4: Flows and Matchings
 LECTURES 3 and 4: Flows and Matchings 1 Max Flow MAX FLOW (SP). Instance: Directed graph N = (V,A), two nodes s,t V, and capacities on the arcs c : A R +. A flow is a set of numbers on the arcs such that
LECTURES 3 and 4: Flows and Matchings 1 Max Flow MAX FLOW (SP). Instance: Directed graph N = (V,A), two nodes s,t V, and capacities on the arcs c : A R +. A flow is a set of numbers on the arcs such that
Introduction to Optimization
 Introduction to Optimization Dynamic Programming November, 0 École Centrale Paris, Châtenay-Malabry, France Dimo Brockhoff INRIA Lille Nord Europe Course Overview Dimo Brockhoff, INRIA Introduction to
Introduction to Optimization Dynamic Programming November, 0 École Centrale Paris, Châtenay-Malabry, France Dimo Brockhoff INRIA Lille Nord Europe Course Overview Dimo Brockhoff, INRIA Introduction to
Bidirectional search and Goal-directed Dijkstra
 Computing the shortest path Bidirectional search and Goal-directed Dijkstra Alexander Kozyntsev October 18, 2010 Abstract We study the problem of finding a shortest path between two vertices in a directed
Computing the shortest path Bidirectional search and Goal-directed Dijkstra Alexander Kozyntsev October 18, 2010 Abstract We study the problem of finding a shortest path between two vertices in a directed
Breadth-First Search, 1. Slides for CIS 675 DPV Chapter 4. Breadth-First Search, 3. Breadth-First Search, 2
 Breadth-First Search, Slides for CIS DPV Chapter Jim Royer EECS October, 00 Definition In an undirected graph, the distance between two vertices is the length of the shortest path between them. (If there
Breadth-First Search, Slides for CIS DPV Chapter Jim Royer EECS October, 00 Definition In an undirected graph, the distance between two vertices is the length of the shortest path between them. (If there
CSE 417 Network Flows (pt 4) Min Cost Flows
 Min Cost Flows") CSE 417 Network Flows (pt 4) Min Cost Flows Reminders > HW6 is due Monday Review of last three lectures > Defined the maximum flow problem find the feasible flow of maximum value flow is feasible if it
CSE 417 Network Flows (pt 4) Min Cost Flows Reminders > HW6 is due Monday Review of last three lectures > Defined the maximum flow problem find the feasible flow of maximum value flow is feasible if it
Learning Objectives. c D. Poole and A. Mackworth 2010 Artificial Intelligence, Lecture 3.3, Page 1
 Learning Objectives At the end of the class you should be able to: devise an useful heuristic function for a problem demonstrate how best-first and A search will work on a graph predict the space and time
Learning Objectives At the end of the class you should be able to: devise an useful heuristic function for a problem demonstrate how best-first and A search will work on a graph predict the space and time
More Graph Algorithms: Topological Sort and Shortest Distance
 More Graph Algorithms: Topological Sort and Shortest Distance Topological Sort The goal of a topological sort is given a list of items with dependencies, (ie. item 5 must be completed before item 3, etc.)
More Graph Algorithms: Topological Sort and Shortest Distance Topological Sort The goal of a topological sort is given a list of items with dependencies, (ie. item 5 must be completed before item 3, etc.)
Single Source Shortest Paths
 Single Source Shortest Paths Given a connected weighted directed graph G(V, E), associated with each edge u, v E, there is a weight w(u, v). The single source shortest paths (SSSP) problem is to find a
Single Source Shortest Paths Given a connected weighted directed graph G(V, E), associated with each edge u, v E, there is a weight w(u, v). The single source shortest paths (SSSP) problem is to find a
Rollout Algorithms for Discrete Optimization: A Survey
 Rollout Algorithms for Discrete Optimization: A Survey by Dimitri P. Bertsekas Massachusetts Institute of Technology Cambridge, MA 02139 dimitrib@mit.edu August 2010 Abstract This chapter discusses rollout
Rollout Algorithms for Discrete Optimization: A Survey by Dimitri P. Bertsekas Massachusetts Institute of Technology Cambridge, MA 02139 dimitrib@mit.edu August 2010 Abstract This chapter discusses rollout
Bidirectional A*: Comparing balanced and symmetric heuristic methods
 Bidirectional A*: Comparing balanced and symmetric heuristic methods Wim Pijls and Henk Post Econometric Institute Report EI 2006-41 Abstract A widely known algorithm for finding the shortest path in a
Bidirectional A*: Comparing balanced and symmetric heuristic methods Wim Pijls and Henk Post Econometric Institute Report EI 2006-41 Abstract A widely known algorithm for finding the shortest path in a
Advanced Algorithm Design and Analysis (Lecture 5) SW5 fall 2007 Simonas Šaltenis
 SW5 fall 2007 Simonas Šaltenis") Advanced Algorithm Design and Analysis (Lecture 5) SW5 fall 2007 Simonas Šaltenis 3.2.12 simas@cs.aau.dk All-pairs shortest paths Main goals of the lecture: to go through one more example of dynamic programming
Advanced Algorithm Design and Analysis (Lecture 5) SW5 fall 2007 Simonas Šaltenis 3.2.12 simas@cs.aau.dk All-pairs shortest paths Main goals of the lecture: to go through one more example of dynamic programming
EE365 Homework 8. (a) A key step in Dijkstra s algorithm is computing the neighbors of a vertex x:
 A key step in Dijkstra s algorithm is computing the neighbors of a vertex x:") EE365, Spring 2013-14 Professor S. Lall EE365 Homework 8 1. Dijkstra s Algorithm. In this problem, you will write an implementation of Dijkstra s algorithm, and use it to find the shortest path in a social
EE365, Spring 2013-14 Professor S. Lall EE365 Homework 8 1. Dijkstra s Algorithm. In this problem, you will write an implementation of Dijkstra s algorithm, and use it to find the shortest path in a social
Object-oriented programming. and data-structures CS/ENGRD 2110 SUMMER 2018
 Object-oriented programming and data-structures CS/ENGRD 20 SUMMER 208 Lecture 3: Shortest Path http://courses.cs.cornell.edu/cs20/208su Graph Algorithms Search Depth-first search Breadth-first search
Object-oriented programming and data-structures CS/ENGRD 20 SUMMER 208 Lecture 3: Shortest Path http://courses.cs.cornell.edu/cs20/208su Graph Algorithms Search Depth-first search Breadth-first search
Algorithm Engineering for Route Planning: An Update International Symposium on Algorithms and Computation 2011 Dorothea Wagner December 6, 2011
 Algorithm Engineering for Route Planning: An Update International Symposium on Algorithms and Computation 2011 Dorothea Wagner December 6, 2011 FACULTY FOR INFORMATICS INSTITUTE OF THEORETICAL INFORMATICS
Algorithm Engineering for Route Planning: An Update International Symposium on Algorithms and Computation 2011 Dorothea Wagner December 6, 2011 FACULTY FOR INFORMATICS INSTITUTE OF THEORETICAL INFORMATICS
1 Introduction and Examples
 1 Introduction and Examples Sequencing Problems Definition A sequencing problem is one that involves finding a sequence of steps that transforms an initial system state to a pre-defined goal state for
1 Introduction and Examples Sequencing Problems Definition A sequencing problem is one that involves finding a sequence of steps that transforms an initial system state to a pre-defined goal state for
4.1 Interval Scheduling
 41 Interval Scheduling Interval Scheduling Interval scheduling Job j starts at s j and finishes at f j Two jobs compatible if they don't overlap Goal: find maximum subset of mutually compatible jobs a
41 Interval Scheduling Interval Scheduling Interval scheduling Job j starts at s j and finishes at f j Two jobs compatible if they don't overlap Goal: find maximum subset of mutually compatible jobs a
IMPROVEMENT OF SHORTEST-PATH ALGORITHMS USING SUBGRAPHS' HEURISTICS
 IMPROVEMENT OF SHORTEST-PATH ALGORITHMS USING SUBGRAPHS' HEURISTICS 1 FAISAL KHAMAYSEH, 2 NABIL ARMAN 1 Asstt Prof., Department of Information Technology, Palestine Polytechnic University 2 Prof., Department
IMPROVEMENT OF SHORTEST-PATH ALGORITHMS USING SUBGRAPHS' HEURISTICS 1 FAISAL KHAMAYSEH, 2 NABIL ARMAN 1 Asstt Prof., Department of Information Technology, Palestine Polytechnic University 2 Prof., Department
Künstliche Intelligenz
 Künstliche Intelligenz 3. Suche Teil 3 Dr. Claudia Schon schon@uni-koblenz.de Arbeitsgruppe Künstliche Intelligenz Universität Koblenz-Landau Except for some small changes these slides are transparencies
Künstliche Intelligenz 3. Suche Teil 3 Dr. Claudia Schon schon@uni-koblenz.de Arbeitsgruppe Künstliche Intelligenz Universität Koblenz-Landau Except for some small changes these slides are transparencies
Shortest-path calculation of first arrival traveltimes by expanding wavefronts
 Stanford Exploration Project, Report 82, May 11, 2001, pages 1 144 Shortest-path calculation of first arrival traveltimes by expanding wavefronts Hector Urdaneta and Biondo Biondi 1 ABSTRACT A new approach
Stanford Exploration Project, Report 82, May 11, 2001, pages 1 144 Shortest-path calculation of first arrival traveltimes by expanding wavefronts Hector Urdaneta and Biondo Biondi 1 ABSTRACT A new approach
Homework Assignment #3 Graph
 CISC 4080 Computer Algorithms Spring, 2019 Homework Assignment #3 Graph Some of the problems are adapted from problems in the book Introduction to Algorithms by Cormen, Leiserson and Rivest, and some are
CISC 4080 Computer Algorithms Spring, 2019 Homework Assignment #3 Graph Some of the problems are adapted from problems in the book Introduction to Algorithms by Cormen, Leiserson and Rivest, and some are
Memory Placement in Network Compression: Line and Grid Topologies
 ISITA212, Honolulu, Hawaii, USA, October 28-31, 212 Memory Placement in Network Compression: Line and Grid Topologies Mohsen Sardari, Ahmad Beirami, Faramarz Fekri School of Electrical and Computer Engineering,
ISITA212, Honolulu, Hawaii, USA, October 28-31, 212 Memory Placement in Network Compression: Line and Grid Topologies Mohsen Sardari, Ahmad Beirami, Faramarz Fekri School of Electrical and Computer Engineering,
Introduction to Algorithms. Lecture 11
 Introduction to Algorithms Lecture 11 Last Time Optimization Problems Greedy Algorithms Graph Representation & Algorithms Minimum Spanning Tree Prim s Algorithm Kruskal s Algorithm 2 Today s Topics Shortest
Introduction to Algorithms Lecture 11 Last Time Optimization Problems Greedy Algorithms Graph Representation & Algorithms Minimum Spanning Tree Prim s Algorithm Kruskal s Algorithm 2 Today s Topics Shortest
Efficient Algorithms for Solving Shortest Paths on Nearly Acyclic Directed Graphs
 Efficient Algorithms for Solving Shortest Paths on Nearly Acyclic Directed Graphs Shane Saunders Tadao Takaoka Department of Computer Science and Software Engineering, University of Canterbury, Christchurch,
Efficient Algorithms for Solving Shortest Paths on Nearly Acyclic Directed Graphs Shane Saunders Tadao Takaoka Department of Computer Science and Software Engineering, University of Canterbury, Christchurch,
Outline. (single-source) shortest path. (all-pairs) shortest path. minimum spanning tree. Dijkstra (Section 4.4) Bellman-Ford (Section 4.
 shortest path. (all-pairs) shortest path. minimum spanning tree. Dijkstra (Section 4.4) Bellman-Ford (Section 4.") Weighted Graphs 1 Outline (single-source) shortest path Dijkstra (Section 4.4) Bellman-Ford (Section 4.6) (all-pairs) shortest path Floyd-Warshall (Section 6.6) minimum spanning tree Kruskal (Section 5.1.3)
Weighted Graphs 1 Outline (single-source) shortest path Dijkstra (Section 4.4) Bellman-Ford (Section 4.6) (all-pairs) shortest path Floyd-Warshall (Section 6.6) minimum spanning tree Kruskal (Section 5.1.3)
Distance Vector Routing
 ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE Routing in General Distance Vector Routing Jean Yves Le Boudec Fall 22 Contents. Routing in General 2. Distance vector: theory. Distance vector: practice 4. Dynamic
ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE Routing in General Distance Vector Routing Jean Yves Le Boudec Fall 22 Contents. Routing in General 2. Distance vector: theory. Distance vector: practice 4. Dynamic
The Encoding Complexity of Network Coding
 The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
22 Elementary Graph Algorithms. There are two standard ways to represent a
 VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs)
 and Constraint Satisfaction Problems (CSPs)") Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs) Alan Mackworth UBC CS 322 CSP 1 January 25, 2013 P&M textbook 3.7.4 & 4.0-4.2 Lecture Overview Recap Branch & Bound Wrap up of search module
Branch & Bound (B&B) and Constraint Satisfaction Problems (CSPs) Alan Mackworth UBC CS 322 CSP 1 January 25, 2013 P&M textbook 3.7.4 & 4.0-4.2 Lecture Overview Recap Branch & Bound Wrap up of search module
from notes written mostly by Dr. Carla Savage: All Rights Reserved
 CSC 505, Fall 2000: Week 9 Objectives: learn about various issues related to finding shortest paths in graphs learn algorithms for the single-source shortest-path problem observe the relationship among
CSC 505, Fall 2000: Week 9 Objectives: learn about various issues related to finding shortest paths in graphs learn algorithms for the single-source shortest-path problem observe the relationship among
Algorithms on Graphs: Part III. Shortest Path Problems. .. Cal Poly CSC 349: Design and Analyis of Algorithms Alexander Dekhtyar..
 .. Cal Poly CSC 349: Design and Analyis of Algorithms Alexander Dekhtyar.. Shortest Path Problems Algorithms on Graphs: Part III Path in a graph. Let G = V,E be a graph. A path p = e 1,...,e k, e i E,
.. Cal Poly CSC 349: Design and Analyis of Algorithms Alexander Dekhtyar.. Shortest Path Problems Algorithms on Graphs: Part III Path in a graph. Let G = V,E be a graph. A path p = e 1,...,e k, e i E,
Title. Ferienakademie im Sarntal Course 2 Distance Problems: Theory and Praxis. Nesrine Damak. Fakultät für Informatik TU München. 20.
 Title Ferienakademie im Sarntal Course 2 Distance Problems: Theory and Praxis Nesrine Damak Fakultät für Informatik TU München 20. September 2010 Nesrine Damak: Classical Shortest-Path Algorithms 1/ 35
Title Ferienakademie im Sarntal Course 2 Distance Problems: Theory and Praxis Nesrine Damak Fakultät für Informatik TU München 20. September 2010 Nesrine Damak: Classical Shortest-Path Algorithms 1/ 35
An Evolutionary Algorithm for the Multi-objective Shortest Path Problem
 An Evolutionary Algorithm for the Multi-objective Shortest Path Problem Fangguo He Huan Qi Qiong Fan Institute of Systems Engineering, Huazhong University of Science & Technology, Wuhan 430074, P. R. China
An Evolutionary Algorithm for the Multi-objective Shortest Path Problem Fangguo He Huan Qi Qiong Fan Institute of Systems Engineering, Huazhong University of Science & Technology, Wuhan 430074, P. R. China
Dijkstra s Algorithm Last time we saw two methods to solve the all-pairs shortest path problem: Min-plus matrix powering in O(n 3 log n) time and the
 time and the") Dijkstra s Algorithm Last time we saw two methods to solve the all-pairs shortest path problem: Min-plus matrix powering in O(n 3 log n) time and the Floyd-Warshall algorithm in O(n 3 ) time. Neither of
Dijkstra s Algorithm Last time we saw two methods to solve the all-pairs shortest path problem: Min-plus matrix powering in O(n 3 log n) time and the Floyd-Warshall algorithm in O(n 3 ) time. Neither of
Massively Parallel Approximation Algorithms for the Knapsack Problem
 Massively Parallel Approximation Algorithms for the Knapsack Problem Zhenkuang He Rochester Institute of Technology Department of Computer Science zxh3909@g.rit.edu Committee: Chair: Prof. Alan Kaminsky
Massively Parallel Approximation Algorithms for the Knapsack Problem Zhenkuang He Rochester Institute of Technology Department of Computer Science zxh3909@g.rit.edu Committee: Chair: Prof. Alan Kaminsky
Introduction. I Given a weighted, directed graph G =(V, E) with weight function
 with weight function") ntroduction Computer Science & Engineering 2/82 Design and Analysis of Algorithms Lecture 06 Single-Source Shortest Paths (Chapter 2) Stephen Scott (Adapted from Vinodchandran N. Variyam) sscott@cse.unl.edu
ntroduction Computer Science & Engineering 2/82 Design and Analysis of Algorithms Lecture 06 Single-Source Shortest Paths (Chapter 2) Stephen Scott (Adapted from Vinodchandran N. Variyam) sscott@cse.unl.edu
Lecture Notes 2: The Simplex Algorithm
 Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
An Introduction to Dual Ascent Heuristics
 An Introduction to Dual Ascent Heuristics Introduction A substantial proportion of Combinatorial Optimisation Problems (COPs) are essentially pure or mixed integer linear programming. COPs are in general
An Introduction to Dual Ascent Heuristics Introduction A substantial proportion of Combinatorial Optimisation Problems (COPs) are essentially pure or mixed integer linear programming. COPs are in general
LECTURE 18 LECTURE OUTLINE
 LECTURE 18 LECTURE OUTLINE Generalized polyhedral approximation methods Combined cutting plane and simplicial decomposition methods Lecture based on the paper D. P. Bertsekas and H. Yu, A Unifying Polyhedral
LECTURE 18 LECTURE OUTLINE Generalized polyhedral approximation methods Combined cutting plane and simplicial decomposition methods Lecture based on the paper D. P. Bertsekas and H. Yu, A Unifying Polyhedral
CS 341: Algorithms. Douglas R. Stinson. David R. Cheriton School of Computer Science University of Waterloo. February 26, 2019
 CS 341: Algorithms Douglas R. Stinson David R. Cheriton School of Computer Science University of Waterloo February 26, 2019 D.R. Stinson (SCS) CS 341 February 26, 2019 1 / 296 1 Course Information 2 Introduction
CS 341: Algorithms Douglas R. Stinson David R. Cheriton School of Computer Science University of Waterloo February 26, 2019 D.R. Stinson (SCS) CS 341 February 26, 2019 1 / 296 1 Course Information 2 Introduction
Point-to-Point Shortest Path Algorithms with Preprocessing
 Point-to-Point Shortest Path Algorithms with Preprocessing Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint work with Chris Harrelson, Haim Kaplan, and Retato
Point-to-Point Shortest Path Algorithms with Preprocessing Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint work with Chris Harrelson, Haim Kaplan, and Retato
Shortest Paths: Algorithms for standard variants. Algorithms and Networks 2017/2018 Johan M. M. van Rooij Hans L. Bodlaender
 Shortest Paths: Algorithms for standard variants Algorithms and Networks 2017/2018 Johan M. M. van Rooij Hans L. Bodlaender 1 Shortest path problem(s) Undirected single-pair shortest path problem Given
Shortest Paths: Algorithms for standard variants Algorithms and Networks 2017/2018 Johan M. M. van Rooij Hans L. Bodlaender 1 Shortest path problem(s) Undirected single-pair shortest path problem Given
Lecture 10,11: General Matching Polytope, Maximum Flow. 1 Perfect Matching and Matching Polytope on General Graphs
 CMPUT 675: Topics in Algorithms and Combinatorial Optimization (Fall 2009) Lecture 10,11: General Matching Polytope, Maximum Flow Lecturer: Mohammad R Salavatipour Date: Oct 6 and 8, 2009 Scriber: Mohammad
CMPUT 675: Topics in Algorithms and Combinatorial Optimization (Fall 2009) Lecture 10,11: General Matching Polytope, Maximum Flow Lecturer: Mohammad R Salavatipour Date: Oct 6 and 8, 2009 Scriber: Mohammad
CS261: Problem Set #1
 CS261: Problem Set #1 Due by 11:59 PM on Tuesday, April 21, 2015 Instructions: (1) Form a group of 1-3 students. You should turn in only one write-up for your entire group. (2) Turn in your solutions by
CS261: Problem Set #1 Due by 11:59 PM on Tuesday, April 21, 2015 Instructions: (1) Form a group of 1-3 students. You should turn in only one write-up for your entire group. (2) Turn in your solutions by
Mon Tue Wed Thurs Fri
 In lieu of recitations 320 Office Hours Mon Tue Wed Thurs Fri 8 Cole 9 Dr. Georg Dr. Georg 10 Dr. Georg/ Jim 11 Ali Jim 12 Cole Ali 1 Cole/ Shannon Ali 2 Shannon 3 Dr. Georg Dr. Georg Jim 4 Upcoming Check
In lieu of recitations 320 Office Hours Mon Tue Wed Thurs Fri 8 Cole 9 Dr. Georg Dr. Georg 10 Dr. Georg/ Jim 11 Ali Jim 12 Cole Ali 1 Cole/ Shannon Ali 2 Shannon 3 Dr. Georg Dr. Georg Jim 4 Upcoming Check
Automatic reformulation using constraint bridges
 Automatic reformulation using constraint bridges Benoît Legat (UCL) June 29, 2018 Université catholique de Louvain (UCL) Motivation Consider interval constraints: @constraint(m, 0
Automatic reformulation using constraint bridges Benoît Legat (UCL) June 29, 2018 Université catholique de Louvain (UCL) Motivation Consider interval constraints: @constraint(m, 0
A Benders decomposition approach for the robust shortest path problem with interval data
 A Benders decomposition approach for the robust shortest path problem with interval data R. Montemanni, L.M. Gambardella Istituto Dalle Molle di Studi sull Intelligenza Artificiale (IDSIA) Galleria 2,
A Benders decomposition approach for the robust shortest path problem with interval data R. Montemanni, L.M. Gambardella Istituto Dalle Molle di Studi sull Intelligenza Artificiale (IDSIA) Galleria 2,
Topological Sort. Here a topological sort would label A with 1, B and C with 2 and 3, and D with 4.
 Topological Sort The goal of a topological sort is given a list of items with dependencies, (ie. item 5 must be completed before item 3, etc.) to produce an ordering of the items that satisfies the given
Topological Sort The goal of a topological sort is given a list of items with dependencies, (ie. item 5 must be completed before item 3, etc.) to produce an ordering of the items that satisfies the given
A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM
 A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM KARAGIANNIS PANAGIOTIS PAPARRIZOS KONSTANTINOS SAMARAS NIKOLAOS SIFALERAS ANGELO * Department of Applied Informatics, University of
A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM KARAGIANNIS PANAGIOTIS PAPARRIZOS KONSTANTINOS SAMARAS NIKOLAOS SIFALERAS ANGELO * Department of Applied Informatics, University of
Question Points Score TOTAL 50
 UCSD CSE 101 Section B00, Winter 2015 MIDTERM February 5, 2015 NAME: Student ID: Question Points Score 1 10 2 10 3 10 4 10 5 10 TOTAL 50 INSTRUCTIONS. Be clear and concise. Write your answers in the space
UCSD CSE 101 Section B00, Winter 2015 MIDTERM February 5, 2015 NAME: Student ID: Question Points Score 1 10 2 10 3 10 4 10 5 10 TOTAL 50 INSTRUCTIONS. Be clear and concise. Write your answers in the space
Search Algorithms. Uninformed Blind search. Informed Heuristic search. Important concepts:
 Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Monotone Paths in Geometric Triangulations
 Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Monotone Paths in Geometric Triangulations Adrian Dumitrescu Ritankar Mandal Csaba D. Tóth November 19, 2017 Abstract (I) We prove that the (maximum) number of monotone paths in a geometric triangulation
Numerical schemes for Hamilton-Jacobi equations, control problems and games
 Numerical schemes for Hamilton-Jacobi equations, control problems and games M. Falcone H. Zidani SADCO Spring School Applied and Numerical Optimal Control April 23-27, 2012, Paris Lecture 2/3 M. Falcone
Numerical schemes for Hamilton-Jacobi equations, control problems and games M. Falcone H. Zidani SADCO Spring School Applied and Numerical Optimal Control April 23-27, 2012, Paris Lecture 2/3 M. Falcone
Breadth-First Heuristic Search
 14th International Conference on Automated Planning and Scheduling (ICAPS-04) Whistler, British Columbia, Canada June 3-7, 2004 Breadth-First Heuristic Search Rong Zhou and Eric A. Hansen Department of
14th International Conference on Automated Planning and Scheduling (ICAPS-04) Whistler, British Columbia, Canada June 3-7, 2004 Breadth-First Heuristic Search Rong Zhou and Eric A. Hansen Department of