Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
|
|
|
- Marjorie Haynes
- 5 years ago
- Views:
Transcription
1 CS 4758/6758: Robot Learning Spring 2010: Lecture 9
2 Why planning and control? Video


3 Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios?


4 Previous Lecture: Potential Field

5


6 Planning: Articulated Robots

7 Path Planning
8 Planning: Goals Compute motion strategies, e.g., Geometric paths Time-parameterized trajectories Sequence of sensor-based motion commands Achieve high-level goals, e.g., Go to the door and do not collide with obstacles Assemble/disassemble the IKEA bookshelf.


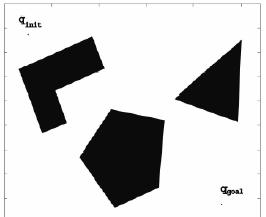
9 Fundamental Question Are two given points connected by a path? Slide 9
10 Motion Planning: Basic Problem Problem statement: Compute a collision-free path for a rigid or articulated moving object among static obstacles. Input Geometry of a moving object, robot, and obstacles How does the robot move? Kinematics of the robot (degrees of freedom) Initial and goal robot configurations (positions & orientations) Output Continuous sequence of collision-free robot configurations connecting the initial and goal configurations Slide 10
11 Example: Rigid Objects
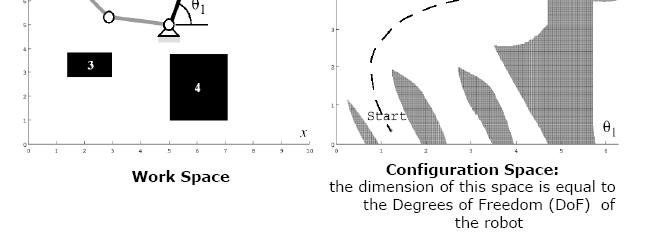
12 Example: Articulated Robot Slide 12
13 Tool: Configuration Space Difficulty Number of degrees of freedom (dimension of configuration space) Geometric complexity Slide 13
14 Extensions of the Basic Problem More complex robots Multiple robots Movable objects Nonholonomic & dynamic constraints Physical models and deformable objects Sensorless motions (exploiting task mechanics) Uncertainty in control Slide 14
15 Extensions of the Basic Problem More complex environments Moving obstacles Uncertainty in sensing More complex objectives Integration of planning and control Sensing the environment Model/map building Target finding, tracking
16 Practical Algorithms A complete motion planner always returns a solution when one exists and indicates that no such solution exists otherwise. Most motion planning problems are hard, meaning that complete planners take exponential time in the number of degrees of freedom, moving objects, etc. Slide 16
17 Practical Algorithms Theoretical algorithms strive for completeness and low worst-case complexity Difficult to implement Not robust Heuristic algorithms strive for efficiency in commonly encountered situations. No performance guarantee Practical algorithms with performance guarantees Weaker forms of completeness Simplifying assumptions on the space: exponential time algorithms that work in practice

18 Problem Formulation for Point Robot Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between the initial and goal positions
19 Framework
20 Discretization Methods Full Grid Visibility Graph Voronoi Diagram Cell Decomposition Probabilistic Roadmaps

21 Full Grid
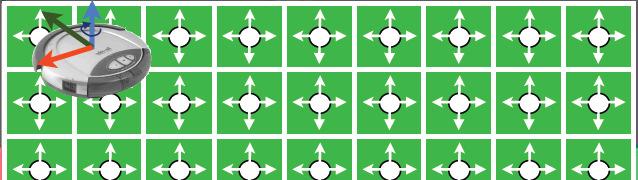
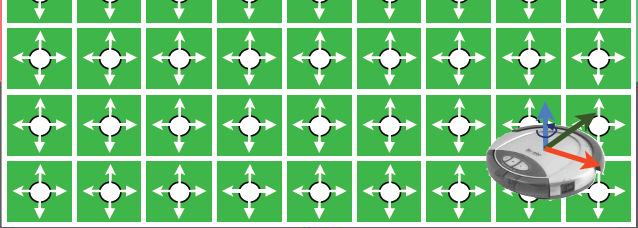
22 Full Grid
23 Visibility Graph Method Observation: If there is a collision-free path between two points, then there is a polygonal path that bends only at the obstacles vertices. Why? Any collision-free path can be transformed into a polygonal path that bends only at the obstacle vertices. A polygonal path is a piecewise linear curve.


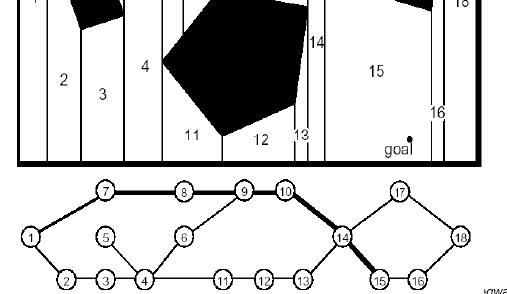
24 Visibility Graph A visibility graph is a graph such that Nodes: q init, q goal, or an obstacle vertex. Edges: An edge exists between nodes u and v if the line segment between u and v is an obstacle edge or it does not intersect the obstacles.
25 A Simple Algorithm for Building Visibility Graphs
26 Computational Efficiency Simple algorithm O(n 3 ) time More efficient algorithms Rotational sweep O(n 2 log n) time Optimal algorithm O(n 2 ) time Output sensitive algorithms O(n 2 ) space Slide 26

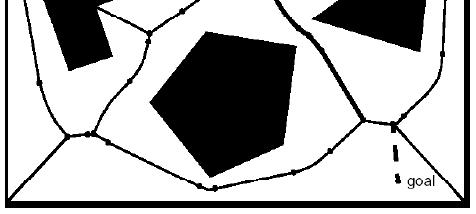
27 Voronoi Diagram
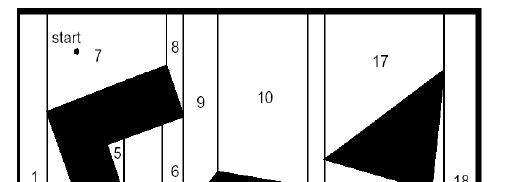
28 Cell Decomposition
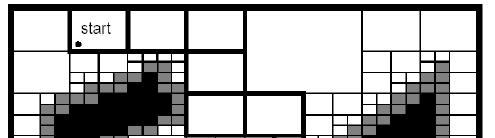
29 Approximate Cell Decomposition
30 Problem Formulation for General Robot What is the state space? Does it include other objects E.g., when interacting with other objects Full Grid discretization is huge (consider 7-dof arm, 100^7 possibilities) How should I discretize?


31
32

33

34
35 Discretization Methods Full Grid Visibility Graph Voronoi Diagram Cell Decomposition Probabilistic Roadmaps
36 Framework Slide 36
37 Summary Discretize the space by constructing visibility graph Search the visibility graph with breadth-first search
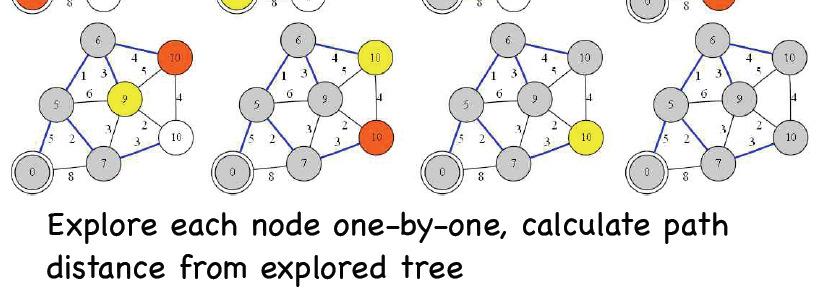
38 Search: Overview Breadth-first search Depth-first search A* star search Dijkstra
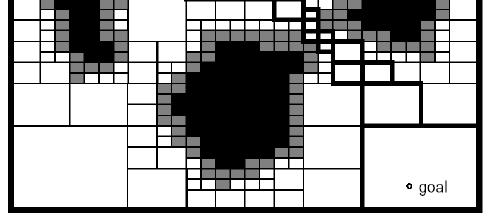
39 Breadth-First Search Slide 39
40 Breadth-First Search Slide 40
41 Breadth-First Search Slide 41
42 Breadth-First Search Slide 42
43 Breadth-First Search Slide 43

44 Breadth-First Search Slide 44
45 Breadth-First Search Slide 45
46 Breadth-First Search Slide 46

47 Breadth-First Search Slide 47
48 Breadth-First Search Slide 48
49 Breadth-first Search
50 Depth-First Search
51 A* Search
52
53 Given perfect sensing and map, one can do: 1. Planning 1. Discretize 2. Search 2. Control 1. Kinematics 2. PID control Example video

54

55
56
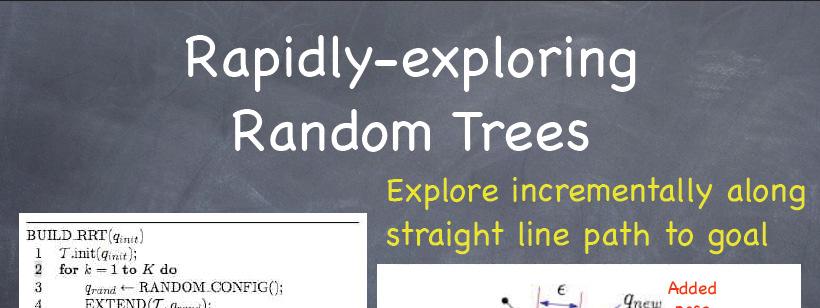
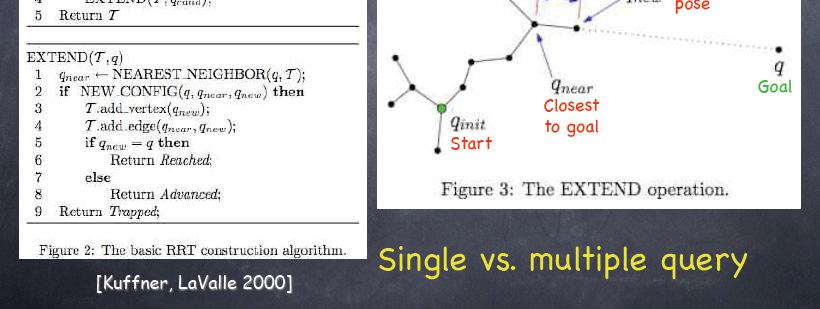
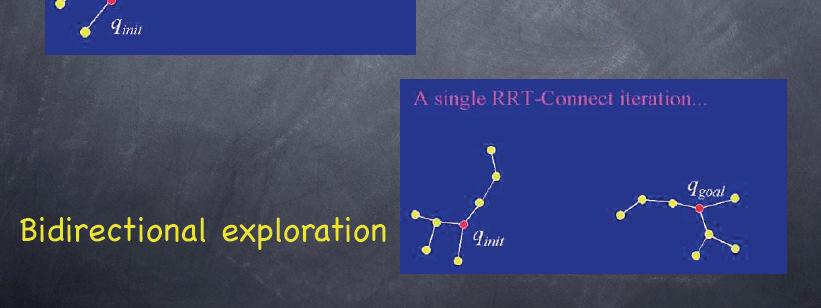
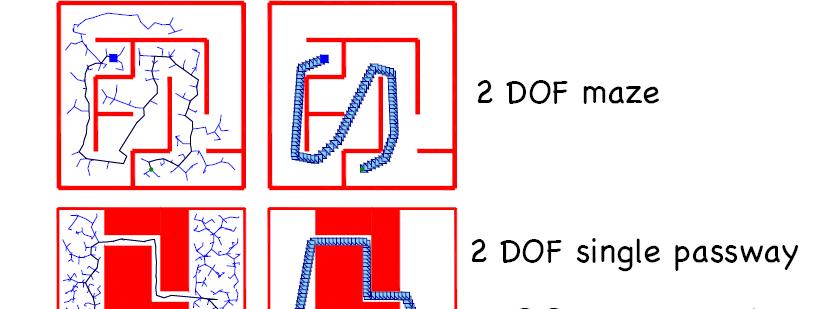
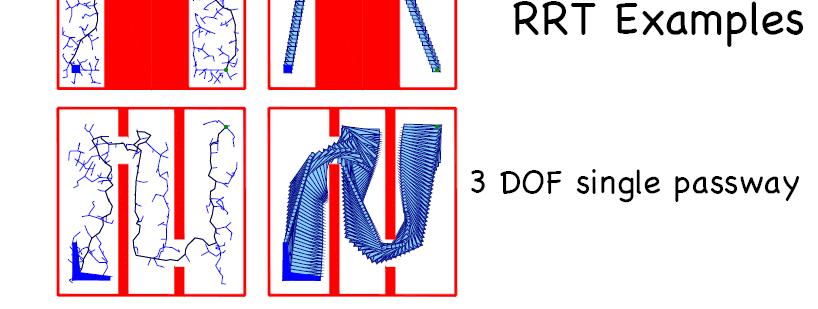
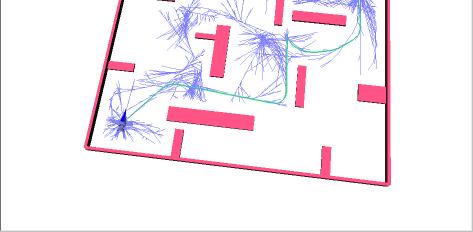
57 RRT

58
59
60
61 RRT: Car like robot
62 Hovercraft
63 RRT Reckless Driver
64 Driver s perspective


65 Planning packages in ROS OpenRave planar_patch_map (to convert point- cloud to polygonal structures)
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Algorithmic Robotics and Motion Planning
 Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning for a Point Robot (2/2) Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.
 Point Robot on a Grid. Planning requires models. Point Robot on a Grid 1/18/2012.") Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
Motion Planning for a Point Robot (/) Class scribing Position paper 1 Planning requires models Point Robot on a Grid The Bug algorithms are reactive motion strategies ; they are not motion planners To
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles
 A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
Configuration Space. Ioannis Rekleitis
 Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM
 SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Motion Planning. Chapter Motion Planning Concepts. by Lydia E. Kavraki and Steven M. LaValle Configuration Space
 Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Robot Motion Planning in Eight Directions
 Robot Motion Planning in Eight Directions Miloš Šeda and Tomáš Březina Abstract In this paper, we investigate the problem of 8-directional robot motion planning where the goal is to find a collision-free
Robot Motion Planning in Eight Directions Miloš Šeda and Tomáš Březina Abstract In this paper, we investigate the problem of 8-directional robot motion planning where the goal is to find a collision-free
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Motion Planning. Jana Kosecka Department of Computer Science
 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
A Simple, but NP-Hard, Motion Planning Problem
 A Simple, but NP-Hard, Motion Planning Problem Lawrence H. Erickson and Steven M. LaValle University of Illinois at Urbana-Champaign Department of Computer Science 201 N. Goodwin Ave. Urbana, IL 61801
A Simple, but NP-Hard, Motion Planning Problem Lawrence H. Erickson and Steven M. LaValle University of Illinois at Urbana-Champaign Department of Computer Science 201 N. Goodwin Ave. Urbana, IL 61801
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Advanced path planning. ROS RoboCup Rescue Summer School 2012
 Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
MEAM 620 Part II Introduction to Motion Planning. Peng Cheng. Levine 403,GRASP Lab
 MEAM 620 Part II Introduction to Motion Planning Peng Cheng chpeng@seas.upenn.edu Levine 403,GRASP Lab Part II Objectives Overview of motion planning Introduction to some basic concepts and methods for
MEAM 620 Part II Introduction to Motion Planning Peng Cheng chpeng@seas.upenn.edu Levine 403,GRASP Lab Part II Objectives Overview of motion planning Introduction to some basic concepts and methods for
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Roadmap Methods vs. Cell Decomposition in Robot Motion Planning
 Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 007 17 Roadmap Methods vs. Cell Decomposition in Robot Motion
Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation, Corfu Island, Greece, February 16-19, 007 17 Roadmap Methods vs. Cell Decomposition in Robot Motion
Assignment 1 is out! Due: 9 Sep 23:59! Can work in a group of 2-3 students.! NO cheating!!!! Submit in turnitin! Code + report!
 Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs
 16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Shorter, Smaller, Tighter Old and New Challenges
 How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Mobile Robots Path Planning using Genetic Algorithms
 Mobile Robots Path Planning using Genetic Algorithms Nouara Achour LRPE Laboratory, Department of Automation University of USTHB Algiers, Algeria nachour@usthb.dz Mohamed Chaalal LRPE Laboratory, Department
Mobile Robots Path Planning using Genetic Algorithms Nouara Achour LRPE Laboratory, Department of Automation University of USTHB Algiers, Algeria nachour@usthb.dz Mohamed Chaalal LRPE Laboratory, Department
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
MEM380 Applied Autonomous Robots Fall Depth First Search A* and Dijkstra s Algorithm
 MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
MEM380 Applied Autonomous Robots Fall Breadth First Search Depth First Search A* and Dijkstra s Algorithm Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/ Instructor:
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Motion Planning for Mobile Robots - A Guide
 Motion Planning for Mobile Robots - A Guide S.A.M. Coenen CST 2012.108 Master s thesis Coach(es): Supervisor: dr.ir. M.J.G. van de Molengraft ir. J.J.M. Lunenburg dr.ir. G.J.L. Naus prof.dr.ir. M. Steinbuch
Motion Planning for Mobile Robots - A Guide S.A.M. Coenen CST 2012.108 Master s thesis Coach(es): Supervisor: dr.ir. M.J.G. van de Molengraft ir. J.J.M. Lunenburg dr.ir. G.J.L. Naus prof.dr.ir. M. Steinbuch
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
PATH PLANNING IMPLEMENTATION USING MATLAB
 PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
University of Nevada, Reno. Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT*
 University of Nevada, Reno Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT* A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
University of Nevada, Reno Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT* A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Robot Motion Planning Using Generalised Voronoi Diagrams
 Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
CS 763 F16. Moving objects in space with obstacles/constraints.
 Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Moving objects in space with obstacles/constraints. Objects = robots, vehicles, jointed linkages (robot arm), tools (e.g. on automated assembly line), foldable/bendable objects. Objects need not be physical
Real-time Reach Planning for Animated Characters Using Hardware Acceleration
 Real-time Reach Planning for Animated Characters Using Hardware Acceleration Ying Liu Norman I. Badler Center for Human Modeling and Simulation Department of Computer and Information Science University
Real-time Reach Planning for Animated Characters Using Hardware Acceleration Ying Liu Norman I. Badler Center for Human Modeling and Simulation Department of Computer and Information Science University
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Roadmap-Based Path Planning
 Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical