Photo Tourism: Exploring Photo Collections in 3D
|
|
|
- Dennis Gray
- 5 years ago
- Views:
Transcription
1 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research Noah Snavely Noah Snavely

2 Reproduced with permission of Yahoo! Inc by Yahoo! Inc. YAHOO! and the YAHOO! logo are trademarks of Yahoo! Inc.

3 Photo Tourism






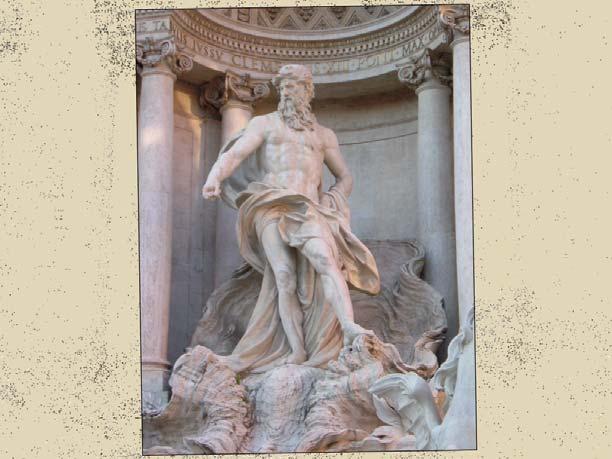
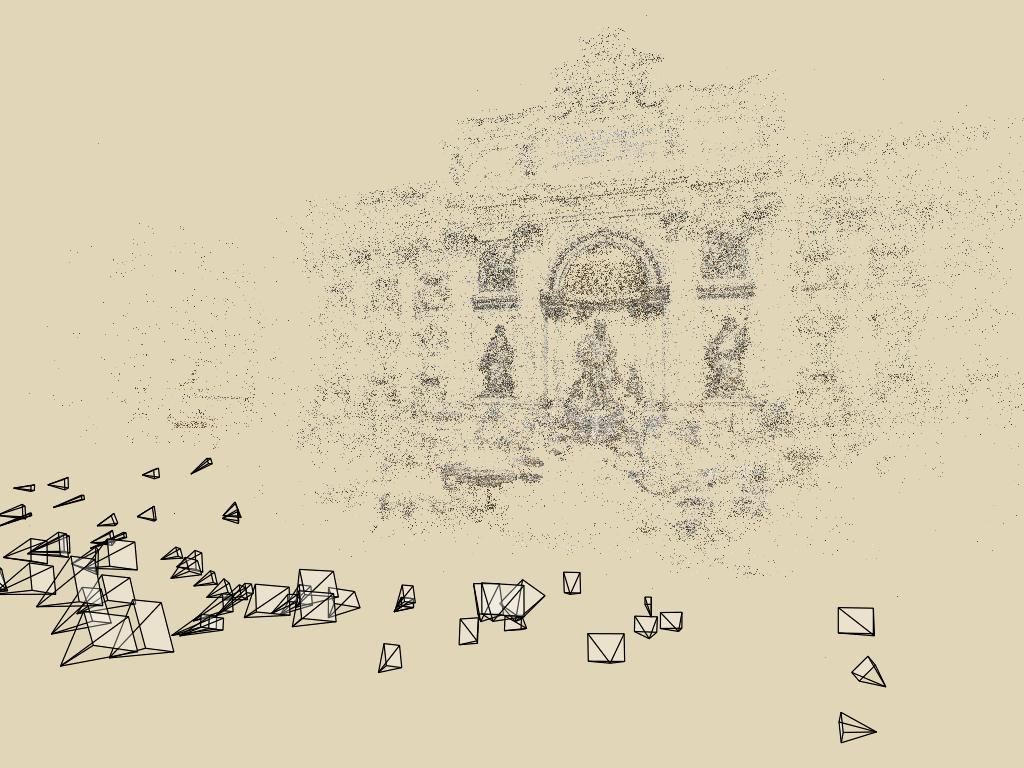
4 Photo Tourism overview Input photographs Scene reconstruction Relative camera positions and orientations Point cloud Sparse correspondence Photo Explorer
5 Related work Image-based modeling Debevec, et al. SIGGRAPH 1996

6 FAÇADE: ADE: Modeling and Rendering Architecture from Photographs P. Debevec, C. J. Taylor, J. Malik SIGGRAPH 1997
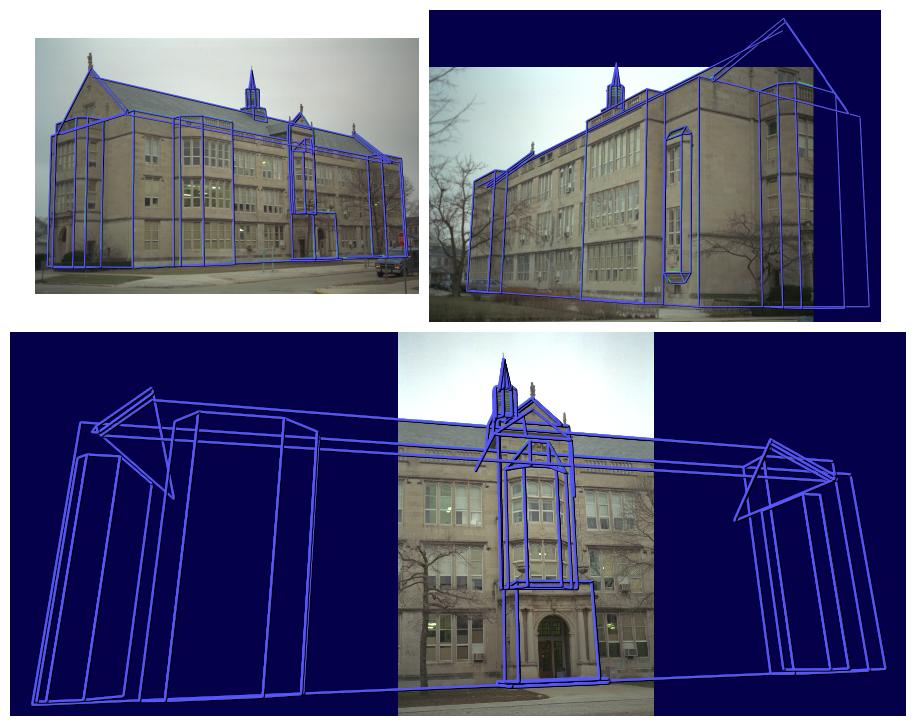
7 Overview Take a few widely spaced photographs Build simple underlying model of scene Use correspondences between photos to adjust scene parameters Paste photos back onto simple geometry of scene for realistic façade Slide credit: D. Luebke
8 Photogrammetric Modeling User builds a simple geometric model using blocks: primitive solid shapes Example: boxes, wedges, prisms, frusta, surfaces of revolution User marks correspondences between images and model System fits model to images Slide credit: D. Luebke
9 Photogrammetric Modeling The system needs to solve for the parameters of blocks Height, width, translation, rotation, etc. Slide credit: D. Luebke
10 Photogrammetric Modeling Knowns: image segments to block edge correspondences Unknowns: block parameters, camera position/orientation Architectural constraints reduce the number of unknowns Slide credit: D. Luebke
11 Photogrammetric Modeling Architectural constraints Roof prism lies flush on building block Stacked tower blocks share center axis Slide credit: D. Luebke

12 Example result Three of 12 input photographs for the University High School, Urbana, IL: Slide credit: D. Luebke
13


14
15 View-Dependent Texture Mapping Given the model, treat each camera position as a slide projector Some images overlap! Idea: pick image taken from viewpoint closest to desired rendering viewpoint Better: use weighted average or do texture mapping on a per-pixel basis Slide credit: D. Luebke

16 View-Dependent Texture Mapping

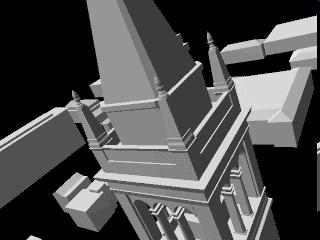
17 Photogrammetric Modeling The Campanile, Berkeley

18 Photogrammetric Modeling Model of Berkeley campus constructed from 15 photographs:


19 The Campanile Movie




20 Related work Image-based modeling Debevec, et al. SIGGRAPH 1996 Schaffalitzky and Zisserman ECCV 2002 Brown and Lowe 3DIM 2005 Image-based rendering Aspen Movie Map Lippman, et al., 1978 Photorealistic IBR: Levoy and Hanrahan, SIGGRAPH 1996 Gortler, et al, SIGGRAPH 1996 Seitz and Dyer, SIGGRAPH 1996 Aliaga, et al, SIGGRAPH 2001 and many others
21 Photo Tourism overview Scene reconstruction Input photographs Photo Explorer
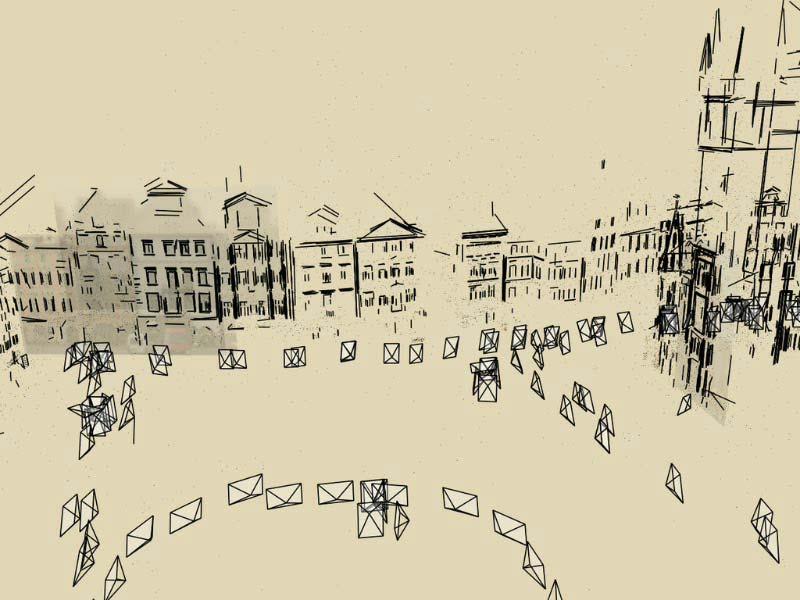
22 Scene reconstruction Automatically estimate position, orientation, and focal length of cameras 3D positions of feature points Feature detection Pairwise feature matching Incremental structure from motion Correspondence estimation


23 Feature detection Detect features using SIFT [Lowe, IJCV 2004]
24 Feature detection Detect features using SIFT [Lowe, IJCV 2004]
25 Feature detection Detect features using SIFT [Lowe, IJCV 2004]
26 Feature matching Match features between each pair of images
27 Feature matching Refine matching using RANSAC [Fischler & Bolles 1987] to estimate fundamental matrices between pairs




28 Correspondence estimation Link up pairwise matches to form connected components of matches across several images Image 1 Image 2 Image 3 Image 4
29 Structure from motion p 1 p 4 p 3 p 2 minimize f(r,t,p) p 5 p 6 p 7 Camera 1 Camera 3 R 1,t 1 Camera 2 R 3,t 3 R 2,t 2

30 Incremental structure from motion
31 Incremental structure from motion
32 Incremental structure from motion
33 Reconstruction performance For photo sets from the Internet, 20% to 75% of the photos were registered Unregistered photos: Running time: < 1 hour for 80 photos > 1 week for 2600 photo
34 Photo Tourism overview Input photographs Scene reconstruction Photo Explorer

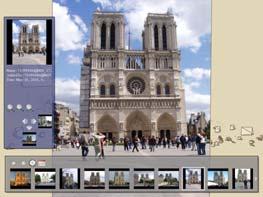
35 Photo Explorer
36 Photo Tourism overview Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations

37 Object-based based browsing
38 Object-based based browsing Visibility Resolution Head-on view


39 Relation-based browsing Find all similar images Find all details Find all zoom outs Zoom in Move left Move right Zoom out
40 Relation-based browsing Image A Image B
41 Relation-based browsing Image A Image B
42 Relation-based browsing to the right of Image A Image B Image C
43 Relation-based browsing to the right of Image A Image B Image C
44 Relation-based browsing to the right of Image A Image B is detail of Image C Image D
45 Relation-based browsing to the right of Image A Image B is detail of Image C Image D
46 Relation-based browsing to the left of to the right of Image A Image B is zoom-out of is detail of is detail of is detail of is zoom-out of is zoom-out of Image C is detail of Image D

47 Overhead map

48 Prague Old Town Square
49 Photo Tourism overview Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations
50 Rendering
51 Rendering
52 Rendering
53 Rendering transitions
54 Rendering transitions


55 Rendering transitions
56 Rendering transitions Camera A Camera B
57 Photo Tourism overview Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations
58 Annotations

59 Annotations Reproduced with permission of Yahoo! Inc by Yahoo! Inc. YAHOO! and the YAHOO! logo are trademarks of Yahoo! Inc.

60 Annotations
61 Microsoft Photosynth Project Demo
62 Limitations / Future work Not all photos can be reliably matched Better feature detection / matching Integrating GPS & other localization info. Structure from motion scalability ECCV 2008 paper by Li et al. Improved navigation, transitions SIGGRAPH 2008
63 Finding Paths Through the World s Photos N. Snavely, R. Garg, S. Seitz, R. Szeliski SIGGRAPH 2008
64 Advances over Photo Tourism Better view interpolation for landmarks that are not well approximated by planar facades Fluid, freeform 3D navigation Automatic discovery of scene-specific controls: orbits, panoramas Path planning for transitions between different viewpoints
65 System components Input photographs, structure from motion Viewpoint scoring function Estimates the quality of rendering a particular input image from a given viewpoint Navigation controls Automatically discover orbits, panoramas, representative views Path planning Rendering engine For any user position, find best scoring input image and reproject it from the current viewpoint Orbit stabilization, appearance stabilization
66 Viewpoint Scoring Function Ideally, measure the difference between the reprojected view and a real photo of the scene captured at a given location Quality criteria: Angular deviation Field of view Resolution
67 Scene-Specific Specific Navigation Controls Orbits An orbit is a distribution of views in a circle converging toward the same object An orbit is specified by an axis and an image Scoring possible orbits: quality, length, convergence, object-centeredness
68 Scene-Specific Specific Navigation Controls Orbits An orbit is a distribution of views in a circle converging toward the same object An orbit is specified by an axis and an image Scoring possible orbits: quality, length, convergence, object-centeredness Orbit enumeration: first find likely axes, then evaluate orbit scoring function for every image and that axis
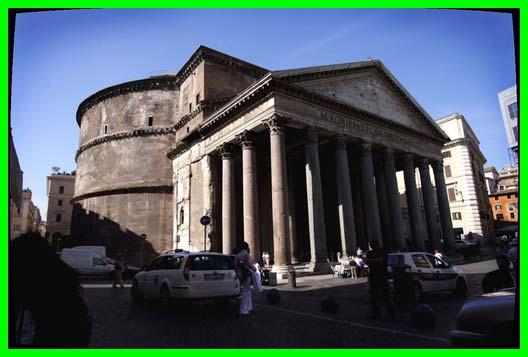
69 Detected orbits Statue of Liberty Pantheon
70 Scene-Specific Specific Navigation Controls Orbits Panoramas A set of images taken from approximately the same viewpoint and covering a good range of viewing directions Canonical views Scene summarization algorithm of Simon et al. [ICCV 2007] Choose canonical view for each orbit and panorama, show as thumbnail in scene viewer
71 Path Planning for Transitions Automatically compute path from one image to another, show multiple reprojected images between the two endpoints (unlike Photo Tourism) Discrete solution: find shortest path in a transition graph defined by input views Transition cost between two images: computed based on viewpoint scoring function The discrete shortest path can be improved by smoothing


72 Path Planning Example
73 Orbit Stabilization Images are reprojected using a proxy plane Planes fit to scene points can cause jerky motion, especially for orbits For orbit stabilization, choose a proxy plane that passes through the orbit axis and is (roughly) parallel to the source image plane
74 Appearance Stabilization Compute distance between geometrically and photometrically aligned images Similarity mode: favor transitions between similar images Color compensation: estimate gain and offset between two images, adjust next image to match the previously viewed one

75 Appearance Stabilization All images Similar images Color compensation


76 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm ECCV 2008


77 Overview All images Appearancebased clustering, geometric verification Iconic images Pairwise matching of iconic images SFM Graph cut Iconic scene graph Reconstructed components Components of iconic scene graph

78 The approach 1. Appearance-based clustering Goal: find groups of images with roughly similar viewpoints and scene conditions

79 The approach 1. Appearance-based clustering Goal: find groups of images with roughly similar viewpoints and scene conditions Run k-means clustering with gist descriptors (Oliva & Torralba, 2001)
80 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection Perform feature-based geometric matching between a few top images from each cluster QDEGSAC (Frahm & Pollefeys, 2006) for robust estimation of fundamental matrix or homography Select an iconic image for each cluster as the image with the most total inliers
81 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection
82 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection 3. Construction of iconic scene graph Perform geometric matching between every pair of iconic images Create a weighted edge for every pair related by a homography or a fundamental matrix
83 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection 3. Construction of iconic scene graph
84 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection 3. Construction of iconic scene graph 4. Finding graph components Use tags to eliminate semantically irrelevant isolated nodes Run normalized cuts to break up the rest of the graph into smaller tightly connected sub-graphs








85 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection 3. Construction of iconic scene graph 4. Finding graph components
86 The approach 1. Appearance-based clustering 2. Geometric verification and iconic image selection 3. Construction of iconic scene graph 4. Finding graph components 5. Structure from motion Perform SFM separately on each component Maximum-weight spanning tree determines the order of incorporating images into the 3D model If possible, merge component models using geometric relationships along edges that were originally cut Register additional non-iconic images to the models (optional)





87 Hierarchical browsing Level 1: components of iconic scene graph Level 2: iconic images belonging to each component Level 3: images inside the gist cluster of each iconic Level 1 Level 2 Level 3


88 Statue of Liberty dataset images 196 iconic images




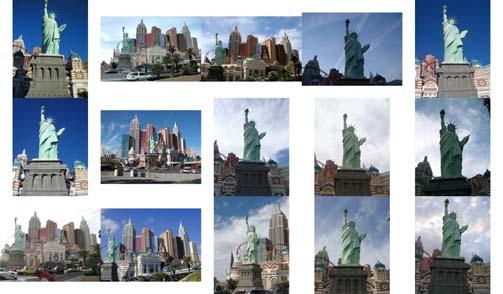



89 Statue of Liberty dataset images Las Vegas Tokyo New York Registered images in largest model: 871 Points visible in 3+ views: 18675


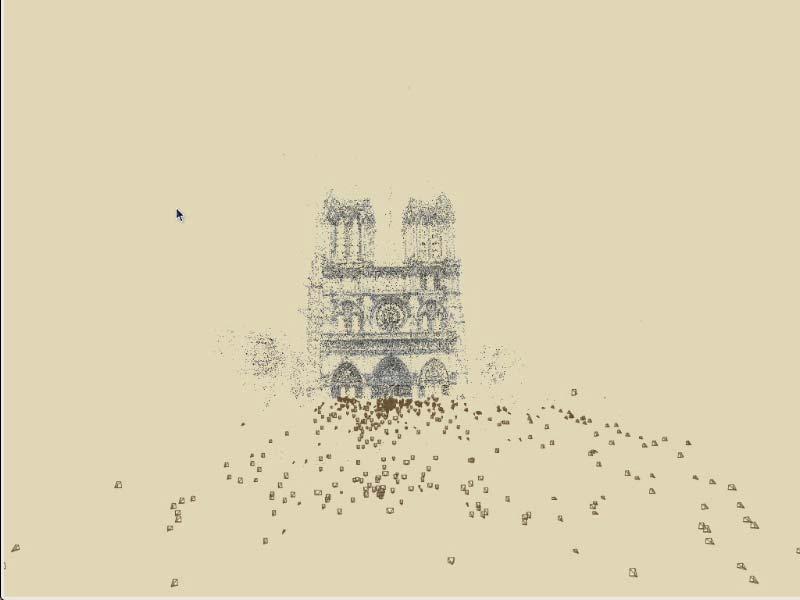
90 Notre Dame dataset images 105 iconic images

91 Notre Dame dataset images Registered images in largest model: 337 Points visible in 3+ views: 30802

92 San Marco dataset images Registered images in largest model: 749 Points visible in 3+ views: 39307
Noah Snavely Steven M. Seitz. Richard Szeliski. University of Washington. Microsoft Research. Modified from authors slides
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs
 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Region Graphs for Organizing Image Collections
 Region Graphs for Organizing Image Collections Alexander Ladikos 1, Edmond Boyer 2, Nassir Navab 1, and Slobodan Ilic 1 1 Chair for Computer Aided Medical Procedures, Technische Universität München 2 Perception
Region Graphs for Organizing Image Collections Alexander Ladikos 1, Edmond Boyer 2, Nassir Navab 1, and Slobodan Ilic 1 1 Chair for Computer Aided Medical Procedures, Technische Universität München 2 Perception
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
From Structure-from-Motion Point Clouds to Fast Location Recognition
 From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Painting-to-3D Model Alignment Via Discriminative Visual Elements. Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA)
 Bryan Russell (Intel) Josef Sivic (INRIA)") Painting-to-3D Model Alignment Via Discriminative Visual Elements Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA) This work Browsing across time 1699 1740 1750 1800 1800 1699 1740 1750
Painting-to-3D Model Alignment Via Discriminative Visual Elements Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA) This work Browsing across time 1699 1740 1750 1800 1800 1699 1740 1750
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Computational Photography: Advanced Topics. Paul Debevec
 Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Algorithms for Image-Based Rendering with an Application to Driving Simulation
 Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
3D model search and pose estimation from single images using VIP features
 3D model search and pose estimation from single images using VIP features Changchang Wu 2, Friedrich Fraundorfer 1, 1 Department of Computer Science ETH Zurich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
3D model search and pose estimation from single images using VIP features Changchang Wu 2, Friedrich Fraundorfer 1, 1 Department of Computer Science ETH Zurich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments
 Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
A Scalable Collaborative Online System for City Reconstruction
 A Scalable Collaborative Online System for City Reconstruction Ole Untzelmann, Torsten Sattler, Sven Middelberg and Leif Kobbelt RWTH Aachen University ole.untzelmann@rwth-aachen.de, {tsattler, middelberg,
A Scalable Collaborative Online System for City Reconstruction Ole Untzelmann, Torsten Sattler, Sven Middelberg and Leif Kobbelt RWTH Aachen University ole.untzelmann@rwth-aachen.de, {tsattler, middelberg,
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
RANSAC: RANdom Sampling And Consensus
 CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Sparse 3D Model Reconstruction from photographs
 Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,
Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,