FUZZY WATERSHED FOR IMAGE SEGMENTATION
|
|
|
- Stanley Paul Poole
- 5 years ago
- Views:
Transcription
1 FUZZY WATERSHED FOR IMAGE SEGMENTATION Ramón Moreno, Manuel Graña Computational Intelligene Group, Universidad del País Vaso, Spain Abstrat The representation of the RGB olor spae points in spherial oordinates allows to retain the hromati omponents of image pixel olors, pulling apart easily the intensity omponent. This representation allows the definition of a hromati distane. Using this distane we define a fuzzy gradient with good properties of pereptual olor onstany. In this paper we present a watershed based image segmentation method using using this fuzzy gradient. Oversegmentation is orreted applying a region merging strategy based on the hromati distane defined on the spherial oordinate representation. Keywords Refletion model, image segmentation, spherial oordinates, hromatiity 1 Introdution Color images have additional information over graysale images that may allow the development of robust segmentation proesses. There have been works using alternative olor spaes with better separation of the hromati omponents like HSI, HSL, HSV, Lab [1, 2] to obtain pereptually orret image segmentation. However, hromatiity s illumination an blur and distort olor patterns. The segmentation method proposed in this paper has inherent olor onstany due to the olor representation hosen and the definition of the hromati distane. In this paper we use the RGB spherial oordinates representation to ahieve image segmentation showing olor onstany properties [3 5]. We define a hromati distane on this representation. The robustness and olor onstany of the approah is grounded in the dihromati refletion model (DRM) [6]. We propose a hromati gradient operator suitable for the definition of a watershed transformation on olor images and a robust region merging for meaningful olor image segmentation. The baseline hromati gradient operator introdued in [3, 7] is very sensitive to noise in the dark areas of the image. We propose in this paper a fuzzy gradient operator overoming this problem whih is useful to build a watershed transformation on olor images. To ahieve a natural segmentation, we perform region merging on the basis of our proposed hromati distane over the hromati haraterization of the watershed regions. We give a general shema that ombines watershed flooding with region merging in a single proess. Finally, we speify our proposal as an instane of the aforementioned general shema. The paper outline is as follows. Setion 2 presents the RGB spherial interpretation, inluding the definition of the hromati distane. Setion 3 presents the fuzzy watershed image segmentation method. Setion 4 shows experimental results omparing our method to other approahes. Finally, Setion 5 gives the onlusions of this work. 2 Spherial oordinates in the RGB Color Spae There are several works that use a spherial/ylindrial representation of RGB olor spae points looking for photometri invariants [8, 9]. We are interested in the orrespondene between the angular parameters (θ, φ) of the spherial representation of a olor point in the RGB spae and its hromatiity Ψ. 2.1 Chromatiity interpretation of RGB Spherial Coordinates An image pixel s olor orresponds to a point in the RGB olor spae = {R, G, B b }. Chromatiity Ψ of a RGB olor R point is given by two of its normalized oordinates r = G R +G +B, g = B R +G +B, b = R +G +B, that fulfill the ondition r + g + b = 1. That is, hromatiity oordinates Ψ = {r, g, b} orrespond to the projetion of on the hromati plane Π Ψ, whih is defined by the olletion of verties {(1, 0, 0), (0, 1, 0), (0, 0, 1)} of the RGB ube whih define the Maxwell s hromati triangle [10], along the hromati line defined as L = {y = k Ψ ; k R}. In other words, all the points in line L have the same hromatiity Ψ. Chromatiity is a robust olor haraterization, whih is is independent of illumination intensity and preserves the geometry of the objets in the sene. Denoting a olor image in RGB spae as I = { I (x) ; x N 2} = { (R, G, B) x ; x N 2}, where x refers to the pixel oordinates in the image grid domain, we denote the orresponding spherial representation as P = { { P (x) ; x N 2} = (φ, θ, l)x ; x N 2}, so we will use (φ, θ) x as the hromatiity representation of the pixel s olor. Sometimes we use the notation x = (i, j). 1
2 Figure 1: A vetor in the RGB spae 2.2 The hromati distane in the RGB spae First, we onvert the RGB artesian oordinates of eah pixel to polar oordinates, with the the blak olor as the RGB spae origin. Let us denote the artesian oordinate image as I (x) = I x = (r, g, b) x ; x N 2 and the spherial oordinate as P (x) = P x = (φ, θ, l) x ; x N 2, where p denotes the pixel position. For the remaining of the paper we disard the magnitude l x beause it does not ontain hromati information, therefore P (x) = P x = (φ, θ) x ; x N 2. For a pair of image pixels x and y, the olor distane between them is defined as: (P x, P y ) = (θ y θ x ) 2 + (φ y φ x ) 2, (1) that is, the olor distane orresponds to the eulidean distane of the Azimuth and Zenith angles of the pixel s RGB olor polar representation. This distane does not take into aount the intensity omponent and, thus, will be robust against speular surfae refletions. It posses olor onstany, beause pairs of pixels in the same refletane surfae will have the same distane regardless of their intensity. 2.3 Chromati gradient operator We formulate a pair of Prewitt-like gradient pseudo-onvolution operations on the basis of the above distane. Note that the (P p, P q ) distane is always positive. Note also that the proess is non linear, so we an not express it by onvolution kernels. The row pseudo-onvolution is defined as CG R (P (i, j)) = and the olumn pseudo-onvolution is defined as CG C (P (i, j)) = 1 r= 1 (P (i r, j + 1), P (i r, j 1)), 1 (P (i + 1, j ), P (i 1, j )), = 1 so that the olor distane between pixels substitutes the intensity subtration of the Prewitt linear operator. The olor gradient image is omputed as: CG(x) = CG R (x) + CG C (x) (2) 2.4 A Fuzzy Color Gradient Inspired in the human vision, diferent retinal ells need diferent energy for its ativation. Cones are vey sensitive to intensity wheras rods need more energy for its ativation, whose an detet the romatiity. Depending of the sourfae radiane, these retinal ells an be ativated. We follow similar approah in order to define our fuzzy hromati distane. For pixels with high intensity we are going to use the hromati gradient defined in equation 2, whereas for pixels with poor illumination are going to use the onventional linear intensity gradient. We use a fuzzy membership funtion α (x) who gives the membership degree to the well illuminated pixels lass, on the other hand, its standard omplement funtion α(x) = 1 α(x) gives the membership degree to the poor illuminated pixels lass. It is defined as follows α(x) = ( exp 0 ) ( I(x) a b a )2 2σ I(x) < a a I(x) < b b I(x), (3)
3 where I(x) is the pixel intensity. For intensity values below a threshold a it is an intensity gradient, for values above another threshold b it is a hromati gradient, and for values between both it is a mixture of the two kinds of gradients whose mixing oeffiient is gaussian funtion of the image intensity. This idea is expressed mathematially as a onvex ombination of the two gradient operators: F G(x) = α (x) CG (x) + α (x) G (x) (4) where x is the pixel loation, G(x) is the intensity gradient, alulated using the onvolution mask of Eq.2 but using only the intesity parameter l. This fuzzy gradient does not suffer from noise sensitivity in dark regions of the image, the effet of bright spots is redued beause it is hromatially onsistent in bright image regions, and it detets hromati edges. 3 Fuzzy Watershed Image Segmentation Watershed transformation is a powerful mathematial morphology tehnique for image segmentation. It was introdued in image analysis by Beuher and Lantuejoul [11]. The watershed transform onsiders a bi-dimensional image as a topographi relief map. The value of a pixel is interpreted as its elevation. The watershed lines divide the image into athment basins, so that eah basin is assoiated with one loal minimum in the topographi relief map. The watershed transformation works on the spatial gradient magnitude funtion of the image. The rest lines in the gradient magnitude image orrespond to the edges of image objets. Therefore, the watershed transformation partitions the image into meaningful regions aording to the gradient rest lines. We will use the fuzzy gradient as the topographi relief map. 3.1 General Shema The general shema of the watershed method onsists of a flooding proess whih performs a region growing based on the ordered examination of the level sets of the gradient image. In fat, an ordered suession of thresholds are applied to produe the progression of the flooding. The image is examined iteratively n times, eah iteration step the threshold is raised and pixels of the gradient image falling below the new threshold are examined to be labeled with a orresponding region. Initially eah region will ontain the soure of its athment basin when the flooding level reahes it. Eah flooded region is also haraterized by a hromatiity value, that orresponds to the soure pixel hromatiity. This hromatiity value is used to perform region merging simultaneously with the flooding proess. A pixel whose neighboring pixels belong to different regions is a watershed pixel. When a watershed pixel is deteted, the adjaent regions may be merged into one if the hromati distane between the region hromati values is below a hromati threshold. The merged region hromati value is the average of that of the merged regions. The final labeling of the image regions is performed taking into aount the equivalenes established by the merging proess. Watershed pixels whose adjaent regions do not merge into one are labeled as region boundary pixels and retain their hromatiity. 4 Experimental results The general watershed-merge method is parametrized by: The number of iterations n, whih determines the resolution of the flooding proess going over the gradient magnitude image level sets. The gradient operator used to ompute the gradient magnitude image, whih an be either the intensity gradient G (x) of equation or the fuzzy gradient F G (x) of equation 4. The olor representation of the image. Assuming the RGB spae, it an be either the Cartesian representation I (x) or the zenithal and azimuthal angles of the spherial representation P (x). This seletion determines the seletion of the hromati distane. The hromati distane, whih an be either the Eulidean distane in the RGB Cartesian spae, or the hromati distane of equation 1. The hromati distane threshold δ, whih determines the hromati resolution of the region merging proess. We will use a well known benhmark image [12] to ompare our proposed segmentation proess with variations of method obtained with other parameter settings. The dark regions are ritial to the pereptually orret gradient omputation, while the bright spots may indue false edge detetion. The method does not ompute any speular free image to remove this latter problem. The operational parameter settings are n = 100 and δ = 0.1. In figure2 we show the segmentation results on this image for all ombinations of the remaining parameter settings. The olumn of images labeled Gradient has the gradient magnitude images. From top to bottom, figures 2(a), 2(e), 2(i) show, respetively the result of the intensity gradient, the hromati gradient of equation (2), and the fuzzy gradient of equation (4). The olumn of images labeled Watershed orrespond to the image region partition performing only to the flooding proess, without any region merging, on the orresponding gradient magnitude images. 3


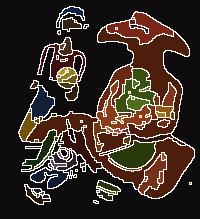


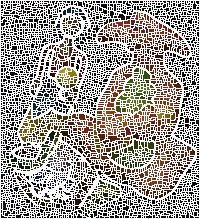

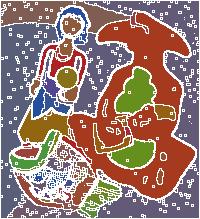

4 Original image Gradient Watershed Segmentation (a) (b) () (d) (e) (f) (g) (h) (i) (j) (k) (l) Figure 2: Image segmentation results with different parametrizations 4
5 It an be appreiated that the fuzzy gradient watershed removes most of the dark miroregions originated by the hromati gradient. There are, however, some regions with different olors in this rough dark region whih are not fully identified by the intensity gradient watershed of Fig. 2 (b) and are better deteted by the fuzzy gradient watershed in Fig. 2(j). The two image olumns with the heading segmentation show the results of the region merging from the orresponding gradient watershed in the same row. The left olumn shows the results of using of the Eulidean distane on the RGB Cartesian oordinates. The right segmentation olumn show the results of the using the hromati distane of equation (1). If we want to asertain the effet of the olor representation and the hromati distane we must ompare the rightmost olumns in Fig. 2. We find that the general effet is that the hromati distane on polar oordinates is better identifying the subtle olor regions in the darkest areas of the image, it detets better the shape of the objets, has better olor onstany properties, and it is muh less sensitive to bright spots or shining areas. Comparing the gradient operators attending to the final segmentation we observe that the fuzzy gradient is better than the others in removing noise from the dark regions and maintain the objet integrity. Overall the best result is obtained with our proposal as shown in Fig. 2(l), where we an easily identify the subtle regions in the upper dark area, the shadow of the lowermost objet, and we an learly identify objet with the same olor unaffeted by shading and bright spots. 5 Conlusions The paper introdues a fuzzy watershed and region merging segmentation based on the zenithal and azimuthal angles of the spherial representation of olors in the RGB spae. These definitions allows the onstrution of a robust fuzzy hromati gradient that we use to realize a robust hromati watershed segmentation. This gradient operator has good olor edge detetion in lightened areas and does not suffer from the noise in the dark areas. The fuzzy watershed is omplemented by a region merging based on the defined hromati distane. We give a general shema of the algorithm performing both watershed and region merging. Out proposal an be stated by this algorithm fixing the olor representation, gradient operator, and region merging distane. We ompare our approah with other algorithms obtained with different setting of the general shema, obtaining the best qualitative segmentation. Referenes [1] J. Angulo and J. Serra, Modelling and segmentation of olour images in polar representations, Image and Vision Computing, vol. 25, pp , Apr [2] A. Hanbury and J. Serra, Mathematial Morphology in the HLS Colour Spae. Proeedings of the 12th British Mahine Vision Conferene, [3] R. Moreno, M. Graña, and E. Zulueta, Rgb olour gradient following olour onstany preservation, Eletronis Letters, vol. 46, pp , jun [4] R. Moreno, M. Graña, and A. d Anjou, A olor transformation for robust detetion of olor landmarks in roboti ontexts, in Trends in Pratial Appliations of Agents and Multiagent Systems, pp , [5] R. Moreno, J. Lopez-Guede, and A. d njou, Hybrid olor spae transformation to visualize olor onstany, in Hybrid Artifiial Intelligene Systems, pp , [6] S. A. Shafer, Using olor to separate refletion omponents, Color Researh and Apliations, vol. 10, pp , april [7] M. G. R. Moreno and A. d Anjou, A image olor gradient preserving olor onstany, in FUZZ-IEEE 2010, pp , WCCI, July [8] Y. Mileva, A. Bruhn, and J. Weikert, Illumination-Robust variational optial flow with photometri invariants, in Pattern Reognition, pp , [9] J. van de Weijer and T. Gevers, Robust optial flow from photometri invariants, in ICIP: 2004 INTERNATIONAL CON- FERENCE ON IMAGE PROCESSING, VOLS 1-5, pp , IEEE, [10] B. JAMES CLERK MAXWELL, Experiments on olour, as pereivedd by the eye, with remarks on olour blindness, TRANSACTIONS OF THE ROYAL SOCIETY OF EDINBURGH, VOL. XXI., PART II., vol. 21, 2, pp , [11] S. Beuher and C. Lantuejoul, Use of Watersheds in Contour Detetion, in International Workshop on Image Proessing: Real-time Edge and Motion Detetion/Estimation, Rennes, Frane., September [12] R. T. Tan, K. Nishino, and K. Ikeuhi, Separating refletion omponents based on hromatiity and noise analysis., IEEE Trans Pattern Anal Mah Intell, vol. 26, pp , Ot
Chromaticity-matched Superimposition of Foreground Objects in Different Environments
 FCV216, the 22nd Korea-Japan Joint Workshop on Frontiers of Computer Vision Chromatiity-mathed Superimposition of Foreground Objets in Different Environments Yohei Ogura Graduate Shool of Siene and Tehnology
FCV216, the 22nd Korea-Japan Joint Workshop on Frontiers of Computer Vision Chromatiity-mathed Superimposition of Foreground Objets in Different Environments Yohei Ogura Graduate Shool of Siene and Tehnology
Performance of Histogram-Based Skin Colour Segmentation for Arms Detection in Human Motion Analysis Application
 World Aademy of Siene, Engineering and Tehnology 8 009 Performane of Histogram-Based Skin Colour Segmentation for Arms Detetion in Human Motion Analysis Appliation Rosalyn R. Porle, Ali Chekima, Farrah
World Aademy of Siene, Engineering and Tehnology 8 009 Performane of Histogram-Based Skin Colour Segmentation for Arms Detetion in Human Motion Analysis Appliation Rosalyn R. Porle, Ali Chekima, Farrah
Video Data and Sonar Data: Real World Data Fusion Example
 14th International Conferene on Information Fusion Chiago, Illinois, USA, July 5-8, 2011 Video Data and Sonar Data: Real World Data Fusion Example David W. Krout Applied Physis Lab dkrout@apl.washington.edu
14th International Conferene on Information Fusion Chiago, Illinois, USA, July 5-8, 2011 Video Data and Sonar Data: Real World Data Fusion Example David W. Krout Applied Physis Lab dkrout@apl.washington.edu
Abstract. Key Words: Image Filters, Fuzzy Filters, Order Statistics Filters, Rank Ordered Mean Filters, Channel Noise. 1.
 Fuzzy Weighted Rank Ordered Mean (FWROM) Filters for Mixed Noise Suppression from Images S. Meher, G. Panda, B. Majhi 3, M.R. Meher 4,,4 Department of Eletronis and I.E., National Institute of Tehnology,
Fuzzy Weighted Rank Ordered Mean (FWROM) Filters for Mixed Noise Suppression from Images S. Meher, G. Panda, B. Majhi 3, M.R. Meher 4,,4 Department of Eletronis and I.E., National Institute of Tehnology,
Trajectory Tracking Control for A Wheeled Mobile Robot Using Fuzzy Logic Controller
 Trajetory Traking Control for A Wheeled Mobile Robot Using Fuzzy Logi Controller K N FARESS 1 M T EL HAGRY 1 A A EL KOSY 2 1 Eletronis researh institute, Cairo, Egypt 2 Faulty of Engineering, Cairo University,
Trajetory Traking Control for A Wheeled Mobile Robot Using Fuzzy Logi Controller K N FARESS 1 M T EL HAGRY 1 A A EL KOSY 2 1 Eletronis researh institute, Cairo, Egypt 2 Faulty of Engineering, Cairo University,
A Novel Validity Index for Determination of the Optimal Number of Clusters
 IEICE TRANS. INF. & SYST., VOL.E84 D, NO.2 FEBRUARY 2001 281 LETTER A Novel Validity Index for Determination of the Optimal Number of Clusters Do-Jong KIM, Yong-Woon PARK, and Dong-Jo PARK, Nonmembers
IEICE TRANS. INF. & SYST., VOL.E84 D, NO.2 FEBRUARY 2001 281 LETTER A Novel Validity Index for Determination of the Optimal Number of Clusters Do-Jong KIM, Yong-Woon PARK, and Dong-Jo PARK, Nonmembers
NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION. Ken Sauer and Charles A. Bouman
 NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION Ken Sauer and Charles A. Bouman Department of Eletrial Engineering, University of Notre Dame Notre Dame, IN 46556, (219) 631-6999 Shool of
NONLINEAR BACK PROJECTION FOR TOMOGRAPHIC IMAGE RECONSTRUCTION Ken Sauer and Charles A. Bouman Department of Eletrial Engineering, University of Notre Dame Notre Dame, IN 46556, (219) 631-6999 Shool of
A {k, n}-secret Sharing Scheme for Color Images
 A {k, n}-seret Sharing Sheme for Color Images Rastislav Luka, Konstantinos N. Plataniotis, and Anastasios N. Venetsanopoulos The Edward S. Rogers Sr. Dept. of Eletrial and Computer Engineering, University
A {k, n}-seret Sharing Sheme for Color Images Rastislav Luka, Konstantinos N. Plataniotis, and Anastasios N. Venetsanopoulos The Edward S. Rogers Sr. Dept. of Eletrial and Computer Engineering, University
Improved Vehicle Classification in Long Traffic Video by Cooperating Tracker and Classifier Modules
 Improved Vehile Classifiation in Long Traffi Video by Cooperating Traker and Classifier Modules Brendan Morris and Mohan Trivedi University of California, San Diego San Diego, CA 92093 {b1morris, trivedi}@usd.edu
Improved Vehile Classifiation in Long Traffi Video by Cooperating Traker and Classifier Modules Brendan Morris and Mohan Trivedi University of California, San Diego San Diego, CA 92093 {b1morris, trivedi}@usd.edu
Supplementary Material: Geometric Calibration of Micro-Lens-Based Light-Field Cameras using Line Features
 Supplementary Material: Geometri Calibration of Miro-Lens-Based Light-Field Cameras using Line Features Yunsu Bok, Hae-Gon Jeon and In So Kweon KAIST, Korea As the supplementary material, we provide detailed
Supplementary Material: Geometri Calibration of Miro-Lens-Based Light-Field Cameras using Line Features Yunsu Bok, Hae-Gon Jeon and In So Kweon KAIST, Korea As the supplementary material, we provide detailed
Cluster-Based Cumulative Ensembles
 Cluster-Based Cumulative Ensembles Hanan G. Ayad and Mohamed S. Kamel Pattern Analysis and Mahine Intelligene Lab, Eletrial and Computer Engineering, University of Waterloo, Waterloo, Ontario N2L 3G1,
Cluster-Based Cumulative Ensembles Hanan G. Ayad and Mohamed S. Kamel Pattern Analysis and Mahine Intelligene Lab, Eletrial and Computer Engineering, University of Waterloo, Waterloo, Ontario N2L 3G1,
Boosted Random Forest
 Boosted Random Forest Yohei Mishina, Masamitsu suhiya and Hironobu Fujiyoshi Department of Computer Siene, Chubu University, 1200 Matsumoto-ho, Kasugai, Aihi, Japan {mishi, mtdoll}@vision.s.hubu.a.jp,
Boosted Random Forest Yohei Mishina, Masamitsu suhiya and Hironobu Fujiyoshi Department of Computer Siene, Chubu University, 1200 Matsumoto-ho, Kasugai, Aihi, Japan {mishi, mtdoll}@vision.s.hubu.a.jp,
A radiometric analysis of projected sinusoidal illumination for opaque surfaces
 University of Virginia tehnial report CS-21-7 aompanying A Coaxial Optial Sanner for Synhronous Aquisition of 3D Geometry and Surfae Refletane A radiometri analysis of projeted sinusoidal illumination
University of Virginia tehnial report CS-21-7 aompanying A Coaxial Optial Sanner for Synhronous Aquisition of 3D Geometry and Surfae Refletane A radiometri analysis of projeted sinusoidal illumination
Rotation Invariant Spherical Harmonic Representation of 3D Shape Descriptors
 Eurographis Symposium on Geometry Proessing (003) L. Kobbelt, P. Shröder, H. Hoppe (Editors) Rotation Invariant Spherial Harmoni Representation of 3D Shape Desriptors Mihael Kazhdan, Thomas Funkhouser,
Eurographis Symposium on Geometry Proessing (003) L. Kobbelt, P. Shröder, H. Hoppe (Editors) Rotation Invariant Spherial Harmoni Representation of 3D Shape Desriptors Mihael Kazhdan, Thomas Funkhouser,
BioTechnology. An Indian Journal FULL PAPER. Trade Science Inc. Improvement of low illumination image enhancement algorithm based on physical mode
 [Type text] [Type text] [Type text] ISSN : 0974-7435 Volume 10 Issue 22 BioTehnology 2014 An Indian Journal FULL PAPER BTAIJ, 10(22), 2014 [13995-14001] Improvement of low illumination image enhanement
[Type text] [Type text] [Type text] ISSN : 0974-7435 Volume 10 Issue 22 BioTehnology 2014 An Indian Journal FULL PAPER BTAIJ, 10(22), 2014 [13995-14001] Improvement of low illumination image enhanement
An Optimized Approach on Applying Genetic Algorithm to Adaptive Cluster Validity Index
 IJCSES International Journal of Computer Sienes and Engineering Systems, ol., No.4, Otober 2007 CSES International 2007 ISSN 0973-4406 253 An Optimized Approah on Applying Geneti Algorithm to Adaptive
IJCSES International Journal of Computer Sienes and Engineering Systems, ol., No.4, Otober 2007 CSES International 2007 ISSN 0973-4406 253 An Optimized Approah on Applying Geneti Algorithm to Adaptive
Detecting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry
 Deteting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry D. M. Zasada, P. K. Sanyal The MITRE Corp., 6 Eletroni Parkway, Rome, NY 134 (dmzasada, psanyal)@mitre.org
Deteting Moving Targets in Clutter in Airborne SAR via Keystoning and Multiple Phase Center Interferometry D. M. Zasada, P. K. Sanyal The MITRE Corp., 6 Eletroni Parkway, Rome, NY 134 (dmzasada, psanyal)@mitre.org
Extracting Partition Statistics from Semistructured Data
 Extrating Partition Statistis from Semistrutured Data John N. Wilson Rihard Gourlay Robert Japp Mathias Neumüller Department of Computer and Information Sienes University of Strathlyde, Glasgow, UK {jnw,rsg,rpj,mathias}@is.strath.a.uk
Extrating Partition Statistis from Semistrutured Data John N. Wilson Rihard Gourlay Robert Japp Mathias Neumüller Department of Computer and Information Sienes University of Strathlyde, Glasgow, UK {jnw,rsg,rpj,mathias}@is.strath.a.uk
Comparing Images Under Variable Illumination
 ( This paper appeared in CVPR 8. IEEE ) Comparing Images Under Variable Illumination David W. Jaobs Peter N. Belhumeur Ronen Basri NEC Researh Institute Center for Computational Vision and Control The
( This paper appeared in CVPR 8. IEEE ) Comparing Images Under Variable Illumination David W. Jaobs Peter N. Belhumeur Ronen Basri NEC Researh Institute Center for Computational Vision and Control The
Detection and Recognition of Non-Occluded Objects using Signature Map
 6th WSEAS International Conferene on CIRCUITS, SYSTEMS, ELECTRONICS,CONTROL & SIGNAL PROCESSING, Cairo, Egypt, De 9-31, 007 65 Detetion and Reognition of Non-Oluded Objets using Signature Map Sangbum Park,
6th WSEAS International Conferene on CIRCUITS, SYSTEMS, ELECTRONICS,CONTROL & SIGNAL PROCESSING, Cairo, Egypt, De 9-31, 007 65 Detetion and Reognition of Non-Oluded Objets using Signature Map Sangbum Park,
Colouring contact graphs of squares and rectilinear polygons de Berg, M.T.; Markovic, A.; Woeginger, G.
 Colouring ontat graphs of squares and retilinear polygons de Berg, M.T.; Markovi, A.; Woeginger, G. Published in: nd European Workshop on Computational Geometry (EuroCG 06), 0 Marh - April, Lugano, Switzerland
Colouring ontat graphs of squares and retilinear polygons de Berg, M.T.; Markovi, A.; Woeginger, G. Published in: nd European Workshop on Computational Geometry (EuroCG 06), 0 Marh - April, Lugano, Switzerland
arxiv: v1 [cs.db] 13 Sep 2017
![arxiv: v1 [cs.db] 13 Sep 2017](/thumbs/96/126543346.jpg "arxiv: v1 [cs.db] 13 Sep 2017") An effiient lustering algorithm from the measure of loal Gaussian distribution Yuan-Yen Tai (Dated: May 27, 2018) In this paper, I will introdue a fast and novel lustering algorithm based on Gaussian distribution
An effiient lustering algorithm from the measure of loal Gaussian distribution Yuan-Yen Tai (Dated: May 27, 2018) In this paper, I will introdue a fast and novel lustering algorithm based on Gaussian distribution
Self-Location of a Mobile Robot with uncertainty by cooperation of an heading sensor and a CCD TV camera
 Self-oation of a Mobile Robot ith unertainty by ooperation of an heading sensor and a CCD TV amera E. Stella, G. Ciirelli, A. Distante Istituto Elaborazione Segnali ed Immagini - C.N.R. Via Amendola, 66/5-706
Self-oation of a Mobile Robot ith unertainty by ooperation of an heading sensor and a CCD TV amera E. Stella, G. Ciirelli, A. Distante Istituto Elaborazione Segnali ed Immagini - C.N.R. Via Amendola, 66/5-706
Pipelined Multipliers for Reconfigurable Hardware
 Pipelined Multipliers for Reonfigurable Hardware Mithell J. Myjak and José G. Delgado-Frias Shool of Eletrial Engineering and Computer Siene, Washington State University Pullman, WA 99164-2752 USA {mmyjak,
Pipelined Multipliers for Reonfigurable Hardware Mithell J. Myjak and José G. Delgado-Frias Shool of Eletrial Engineering and Computer Siene, Washington State University Pullman, WA 99164-2752 USA {mmyjak,
Introduction to Seismology Spring 2008
 MIT OpenCourseWare http://ow.mit.edu 1.510 Introdution to Seismology Spring 008 For information about iting these materials or our Terms of Use, visit: http://ow.mit.edu/terms. 1.510 Leture Notes 3.3.007
MIT OpenCourseWare http://ow.mit.edu 1.510 Introdution to Seismology Spring 008 For information about iting these materials or our Terms of Use, visit: http://ow.mit.edu/terms. 1.510 Leture Notes 3.3.007
Multi-Piece Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality
 INTERNATIONAL CONFERENCE ON MANUFACTURING AUTOMATION (ICMA200) Multi-Piee Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality Stephen Stoyan, Yong Chen* Epstein Department of
INTERNATIONAL CONFERENCE ON MANUFACTURING AUTOMATION (ICMA200) Multi-Piee Mold Design Based on Linear Mixed-Integer Program Toward Guaranteed Optimality Stephen Stoyan, Yong Chen* Epstein Department of
FOREGROUND OBJECT EXTRACTION USING FUZZY C MEANS WITH BIT-PLANE SLICING AND OPTICAL FLOW
 FOREGROUND OBJECT EXTRACTION USING FUZZY C EANS WITH BIT-PLANE SLICING AND OPTICAL FLOW SIVAGAI., REVATHI.T, JEGANATHAN.L 3 APSG, SCSE, VIT University, Chennai, India JRF, DST, Dehi, India. 3 Professor,
FOREGROUND OBJECT EXTRACTION USING FUZZY C EANS WITH BIT-PLANE SLICING AND OPTICAL FLOW SIVAGAI., REVATHI.T, JEGANATHAN.L 3 APSG, SCSE, VIT University, Chennai, India JRF, DST, Dehi, India. 3 Professor,
The Minimum Redundancy Maximum Relevance Approach to Building Sparse Support Vector Machines
 The Minimum Redundany Maximum Relevane Approah to Building Sparse Support Vetor Mahines Xiaoxing Yang, Ke Tang, and Xin Yao, Nature Inspired Computation and Appliations Laboratory (NICAL), Shool of Computer
The Minimum Redundany Maximum Relevane Approah to Building Sparse Support Vetor Mahines Xiaoxing Yang, Ke Tang, and Xin Yao, Nature Inspired Computation and Appliations Laboratory (NICAL), Shool of Computer
A Coarse-to-Fine Classification Scheme for Facial Expression Recognition
 A Coarse-to-Fine Classifiation Sheme for Faial Expression Reognition Xiaoyi Feng 1,, Abdenour Hadid 1 and Matti Pietikäinen 1 1 Mahine Vision Group Infoteh Oulu and Dept. of Eletrial and Information Engineering
A Coarse-to-Fine Classifiation Sheme for Faial Expression Reognition Xiaoyi Feng 1,, Abdenour Hadid 1 and Matti Pietikäinen 1 1 Mahine Vision Group Infoteh Oulu and Dept. of Eletrial and Information Engineering
Face and Facial Feature Tracking for Natural Human-Computer Interface
 Fae and Faial Feature Traking for Natural Human-Computer Interfae Vladimir Vezhnevets Graphis & Media Laboratory, Dept. of Applied Mathematis and Computer Siene of Mosow State University Mosow, Russia
Fae and Faial Feature Traking for Natural Human-Computer Interfae Vladimir Vezhnevets Graphis & Media Laboratory, Dept. of Applied Mathematis and Computer Siene of Mosow State University Mosow, Russia
1. Introduction. 2. The Probable Stope Algorithm
 1. Introdution Optimization in underground mine design has reeived less attention than that in open pit mines. This is mostly due to the diversity o underground mining methods and omplexity o underground
1. Introdution Optimization in underground mine design has reeived less attention than that in open pit mines. This is mostly due to the diversity o underground mining methods and omplexity o underground
PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING. Yesheng Gao, Kaizhi Wang, Xingzhao Liu
 20th European Signal Proessing Conferene EUSIPCO 2012) Buharest, Romania, August 27-31, 2012 PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING Yesheng Gao, Kaizhi Wang,
20th European Signal Proessing Conferene EUSIPCO 2012) Buharest, Romania, August 27-31, 2012 PARAMETRIC SAR IMAGE FORMATION - A PROMISING APPROACH TO RESOLUTION-UNLIMITED IMAGING Yesheng Gao, Kaizhi Wang,
Naïve Bayesian Rough Sets Under Fuzziness
 IJMSA: Vol. 6, No. 1-2, January-June 2012, pp. 19 25 Serials Publiations ISSN: 0973-6786 Naïve ayesian Rough Sets Under Fuzziness G. GANSAN 1,. KRISHNAVNI 2 T. HYMAVATHI 3 1,2,3 Department of Mathematis,
IJMSA: Vol. 6, No. 1-2, January-June 2012, pp. 19 25 Serials Publiations ISSN: 0973-6786 Naïve ayesian Rough Sets Under Fuzziness G. GANSAN 1,. KRISHNAVNI 2 T. HYMAVATHI 3 1,2,3 Department of Mathematis,
Plot-to-track correlation in A-SMGCS using the target images from a Surface Movement Radar
 Plot-to-trak orrelation in A-SMGCS using the target images from a Surfae Movement Radar G. Golino Radar & ehnology Division AMS, Italy ggolino@amsjv.it Abstrat he main topi of this paper is the formulation
Plot-to-trak orrelation in A-SMGCS using the target images from a Surfae Movement Radar G. Golino Radar & ehnology Division AMS, Italy ggolino@amsjv.it Abstrat he main topi of this paper is the formulation
An Effective Hardware Architecture for Bump Mapping Using Angular Operation
 Graphis Hardware (2003) M. Doggett W. Heidrih W. Mark. Shilling (Editors) n Effetive Hardware rhiteture for Bump Mapping Using ngular peration S. G. Lee W. C. Park W. J. Lee T. D. Han and S. B. Yang Department
Graphis Hardware (2003) M. Doggett W. Heidrih W. Mark. Shilling (Editors) n Effetive Hardware rhiteture for Bump Mapping Using ngular peration S. G. Lee W. C. Park W. J. Lee T. D. Han and S. B. Yang Department
3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT?
 3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT? Bernd Girod, Peter Eisert, Marus Magnor, Ekehard Steinbah, Thomas Wiegand Te {girod eommuniations Laboratory, University of Erlangen-Nuremberg
3-D IMAGE MODELS AND COMPRESSION - SYNTHETIC HYBRID OR NATURAL FIT? Bernd Girod, Peter Eisert, Marus Magnor, Ekehard Steinbah, Thomas Wiegand Te {girod eommuniations Laboratory, University of Erlangen-Nuremberg
特集 Road Border Recognition Using FIR Images and LIDAR Signal Processing
 デンソーテクニカルレビュー Vol. 15 2010 特集 Road Border Reognition Using FIR Images and LIDAR Signal Proessing 高木聖和 バーゼル ファルディ Kiyokazu TAKAGI Basel Fardi ヘンドリック ヴァイゲル Hendrik Weigel ゲルド ヴァニーリック Gerd Wanielik This paper
デンソーテクニカルレビュー Vol. 15 2010 特集 Road Border Reognition Using FIR Images and LIDAR Signal Proessing 高木聖和 バーゼル ファルディ Kiyokazu TAKAGI Basel Fardi ヘンドリック ヴァイゲル Hendrik Weigel ゲルド ヴァニーリック Gerd Wanielik This paper
NOISE REMOVAL FOR OBJECT TRACKING BASED ON HSV COLOR SPACE PARAMETER USING CAMSHIFT
 International Journal of Computational Intelligene & Teleommuniation Sstems () 0 pp. 39-45 NOISE REOVAL FOR OBJECT TRACKING BASED ON HSV COLOR SPACE PARAETER USING CASHIFT P. Raavel G. Appasami and R.
International Journal of Computational Intelligene & Teleommuniation Sstems () 0 pp. 39-45 NOISE REOVAL FOR OBJECT TRACKING BASED ON HSV COLOR SPACE PARAETER USING CASHIFT P. Raavel G. Appasami and R.
MATH STUDENT BOOK. 12th Grade Unit 6
 MATH STUDENT BOOK 12th Grade Unit 6 Unit 6 TRIGONOMETRIC APPLICATIONS MATH 1206 TRIGONOMETRIC APPLICATIONS INTRODUCTION 3 1. TRIGONOMETRY OF OBLIQUE TRIANGLES 5 LAW OF SINES 5 AMBIGUITY AND AREA OF A TRIANGLE
MATH STUDENT BOOK 12th Grade Unit 6 Unit 6 TRIGONOMETRIC APPLICATIONS MATH 1206 TRIGONOMETRIC APPLICATIONS INTRODUCTION 3 1. TRIGONOMETRY OF OBLIQUE TRIANGLES 5 LAW OF SINES 5 AMBIGUITY AND AREA OF A TRIANGLE
Smooth Trajectory Planning Along Bezier Curve for Mobile Robots with Velocity Constraints
 Smooth Trajetory Planning Along Bezier Curve for Mobile Robots with Veloity Constraints Gil Jin Yang and Byoung Wook Choi Department of Eletrial and Information Engineering Seoul National University of
Smooth Trajetory Planning Along Bezier Curve for Mobile Robots with Veloity Constraints Gil Jin Yang and Byoung Wook Choi Department of Eletrial and Information Engineering Seoul National University of
Calculation of typical running time of a branch-and-bound algorithm for the vertex-cover problem
 Calulation of typial running time of a branh-and-bound algorithm for the vertex-over problem Joni Pajarinen, Joni.Pajarinen@iki.fi Otober 21, 2007 1 Introdution The vertex-over problem is one of a olletion
Calulation of typial running time of a branh-and-bound algorithm for the vertex-over problem Joni Pajarinen, Joni.Pajarinen@iki.fi Otober 21, 2007 1 Introdution The vertex-over problem is one of a olletion
timestamp, if silhouette(x, y) 0 0 if silhouette(x, y) = 0, mhi(x, y) = and mhi(x, y) < timestamp - duration mhi(x, y), else
 0 0 if silhouette(x, y) = 0, mhi(x, y) = and mhi(x, y) < timestamp - duration mhi(x, y), else") 3rd International Conferene on Multimedia Tehnolog(ICMT 013) An Effiient Moving Target Traking Strateg Based on OpenCV and CAMShift Theor Dongu Li 1 Abstrat Image movement involved bakground movement and
3rd International Conferene on Multimedia Tehnolog(ICMT 013) An Effiient Moving Target Traking Strateg Based on OpenCV and CAMShift Theor Dongu Li 1 Abstrat Image movement involved bakground movement and
New Fuzzy Object Segmentation Algorithm for Video Sequences *
 JOURNAL OF INFORMATION SCIENCE AND ENGINEERING 24, 521-537 (2008) New Fuzzy Obet Segmentation Algorithm for Video Sequenes * KUO-LIANG CHUNG, SHIH-WEI YU, HSUEH-JU YEH, YONG-HUAI HUANG AND TA-JEN YAO Department
JOURNAL OF INFORMATION SCIENCE AND ENGINEERING 24, 521-537 (2008) New Fuzzy Obet Segmentation Algorithm for Video Sequenes * KUO-LIANG CHUNG, SHIH-WEI YU, HSUEH-JU YEH, YONG-HUAI HUANG AND TA-JEN YAO Department
with respect to the normal in each medium, respectively. The question is: How are θ
 Prof. Raghuveer Parthasarathy University of Oregon Physis 35 Winter 8 3 R EFRACTION When light travels from one medium to another, it may hange diretion. This phenomenon familiar whenever we see the bent
Prof. Raghuveer Parthasarathy University of Oregon Physis 35 Winter 8 3 R EFRACTION When light travels from one medium to another, it may hange diretion. This phenomenon familiar whenever we see the bent
Spatial-Aware Collaborative Representation for Hyperspectral Remote Sensing Image Classification
 Spatial-Aware Collaborative Representation for Hyperspetral Remote Sensing Image ifiation Junjun Jiang, Member, IEEE, Chen Chen, Member, IEEE, Yi Yu, Xinwei Jiang, and Jiayi Ma Member, IEEE Representation-residual
Spatial-Aware Collaborative Representation for Hyperspetral Remote Sensing Image ifiation Junjun Jiang, Member, IEEE, Chen Chen, Member, IEEE, Yi Yu, Xinwei Jiang, and Jiayi Ma Member, IEEE Representation-residual
A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR
 Malaysian Journal of Computer Siene, Vol 10 No 1, June 1997, pp 36-41 A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR Md Rafiqul Islam, Harihodin Selamat and Mohd Noor Md Sap Faulty of Computer Siene and
Malaysian Journal of Computer Siene, Vol 10 No 1, June 1997, pp 36-41 A DYNAMIC ACCESS CONTROL WITH BINARY KEY-PAIR Md Rafiqul Islam, Harihodin Selamat and Mohd Noor Md Sap Faulty of Computer Siene and
Machine Vision. Laboratory Exercise Name: Student ID: S
 Mahine Vision 521466S Laoratory Eerise 2011 Name: Student D: General nformation To pass these laoratory works, you should answer all questions (Q.y) with an understandale handwriting either in English
Mahine Vision 521466S Laoratory Eerise 2011 Name: Student D: General nformation To pass these laoratory works, you should answer all questions (Q.y) with an understandale handwriting either in English
Approximate logic synthesis for error tolerant applications
 Approximate logi synthesis for error tolerant appliations Doohul Shin and Sandeep K. Gupta Eletrial Engineering Department, University of Southern California, Los Angeles, CA 989 {doohuls, sandeep}@us.edu
Approximate logi synthesis for error tolerant appliations Doohul Shin and Sandeep K. Gupta Eletrial Engineering Department, University of Southern California, Los Angeles, CA 989 {doohuls, sandeep}@us.edu
Gray Codes for Reflectable Languages
 Gray Codes for Refletable Languages Yue Li Joe Sawada Marh 8, 2008 Abstrat We lassify a type of language alled a refletable language. We then develop a generi algorithm that an be used to list all strings
Gray Codes for Refletable Languages Yue Li Joe Sawada Marh 8, 2008 Abstrat We lassify a type of language alled a refletable language. We then develop a generi algorithm that an be used to list all strings
ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS
 ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS Ahmed Elaksher a, Mohammed Elghazali b, Ashraf Sayed b, and Yasser Elmanadilli b a Shool of Civil Engineering, Purdue University, West Lafayette,
ASSESSMENT OF TWO CHEAP CLOSE-RANGE FEATURE EXTRACTION SYSTEMS Ahmed Elaksher a, Mohammed Elghazali b, Ashraf Sayed b, and Yasser Elmanadilli b a Shool of Civil Engineering, Purdue University, West Lafayette,
Evolutionary Feature Synthesis for Image Databases
 Evolutionary Feature Synthesis for Image Databases Anlei Dong, Bir Bhanu, Yingqiang Lin Center for Researh in Intelligent Systems University of California, Riverside, California 92521, USA {adong, bhanu,
Evolutionary Feature Synthesis for Image Databases Anlei Dong, Bir Bhanu, Yingqiang Lin Center for Researh in Intelligent Systems University of California, Riverside, California 92521, USA {adong, bhanu,
Outline: Software Design
 Outline: Software Design. Goals History of software design ideas Design priniples Design methods Life belt or leg iron? (Budgen) Copyright Nany Leveson, Sept. 1999 A Little History... At first, struggling
Outline: Software Design. Goals History of software design ideas Design priniples Design methods Life belt or leg iron? (Budgen) Copyright Nany Leveson, Sept. 1999 A Little History... At first, struggling
Dr.Hazeem Al-Khafaji Dept. of Computer Science, Thi-Qar University, College of Science, Iraq
 Volume 4 Issue 6 June 014 ISSN: 77 18X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om Medial Image Compression using
Volume 4 Issue 6 June 014 ISSN: 77 18X International Journal of Advaned Researh in Computer Siene and Software Engineering Researh Paper Available online at: www.ijarsse.om Medial Image Compression using
Exploiting Enriched Contextual Information for Mobile App Classification
 Exploiting Enrihed Contextual Information for Mobile App Classifiation Hengshu Zhu 1 Huanhuan Cao 2 Enhong Chen 1 Hui Xiong 3 Jilei Tian 2 1 University of Siene and Tehnology of China 2 Nokia Researh Center
Exploiting Enrihed Contextual Information for Mobile App Classifiation Hengshu Zhu 1 Huanhuan Cao 2 Enhong Chen 1 Hui Xiong 3 Jilei Tian 2 1 University of Siene and Tehnology of China 2 Nokia Researh Center
3D Model Based Pose Estimation For Omnidirectional Stereovision
 3D Model Based Pose Estimation For Omnidiretional Stereovision Guillaume Caron, Eri Marhand and El Mustapha Mouaddib Abstrat Robot vision has a lot to win as well with wide field of view indued by atadioptri
3D Model Based Pose Estimation For Omnidiretional Stereovision Guillaume Caron, Eri Marhand and El Mustapha Mouaddib Abstrat Robot vision has a lot to win as well with wide field of view indued by atadioptri
Weak Dependence on Initialization in Mixture of Linear Regressions
 Proeedings of the International MultiConferene of Engineers and Computer Sientists 8 Vol I IMECS 8, Marh -6, 8, Hong Kong Weak Dependene on Initialization in Mixture of Linear Regressions Ryohei Nakano
Proeedings of the International MultiConferene of Engineers and Computer Sientists 8 Vol I IMECS 8, Marh -6, 8, Hong Kong Weak Dependene on Initialization in Mixture of Linear Regressions Ryohei Nakano
Measurement of the stereoscopic rangefinder beam angular velocity using the digital image processing method
 Measurement of the stereosopi rangefinder beam angular veloity using the digital image proessing method ROMAN VÍTEK Department of weapons and ammunition University of defense Kouniova 65, 62 Brno CZECH
Measurement of the stereosopi rangefinder beam angular veloity using the digital image proessing method ROMAN VÍTEK Department of weapons and ammunition University of defense Kouniova 65, 62 Brno CZECH
Unsupervised color film restoration using adaptive color equalization
 Unsupervised olor film restoration using adaptive olor equalization A. Rizzi 1, C. Gatta 1, C. Slanzi 1, G. Cioa 2, R. Shettini 2 1 Dipartimento di Tenologie dell Informazione Università degli studi di
Unsupervised olor film restoration using adaptive olor equalization A. Rizzi 1, C. Gatta 1, C. Slanzi 1, G. Cioa 2, R. Shettini 2 1 Dipartimento di Tenologie dell Informazione Università degli studi di
Transition Detection Using Hilbert Transform and Texture Features
 Amerian Journal of Signal Proessing 1, (): 35-4 DOI: 1.593/.asp.1.6 Transition Detetion Using Hilbert Transform and Texture Features G. G. Lashmi Priya *, S. Domni Department of Computer Appliations, National
Amerian Journal of Signal Proessing 1, (): 35-4 DOI: 1.593/.asp.1.6 Transition Detetion Using Hilbert Transform and Texture Features G. G. Lashmi Priya *, S. Domni Department of Computer Appliations, National
KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION
 KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION Cuiui Kang 1, Shengai Liao, Shiming Xiang 1, Chunhong Pan 1 1 National Laboratory of Pattern Reognition, Institute of Automation, Chinese
KERNEL SPARSE REPRESENTATION WITH LOCAL PATTERNS FOR FACE RECOGNITION Cuiui Kang 1, Shengai Liao, Shiming Xiang 1, Chunhong Pan 1 1 National Laboratory of Pattern Reognition, Institute of Automation, Chinese
Using Augmented Measurements to Improve the Convergence of ICP
 Using Augmented Measurements to Improve the onvergene of IP Jaopo Serafin, Giorgio Grisetti Dept. of omputer, ontrol and Management Engineering, Sapienza University of Rome, Via Ariosto 25, I-0085, Rome,
Using Augmented Measurements to Improve the onvergene of IP Jaopo Serafin, Giorgio Grisetti Dept. of omputer, ontrol and Management Engineering, Sapienza University of Rome, Via Ariosto 25, I-0085, Rome,
A Unified Subdivision Scheme for Polygonal Modeling
 EUROGRAPHICS 2 / A. Chalmers and T.-M. Rhyne (Guest Editors) Volume 2 (2), Number 3 A Unified Subdivision Sheme for Polygonal Modeling Jérôme Maillot Jos Stam Alias Wavefront Alias Wavefront 2 King St.
EUROGRAPHICS 2 / A. Chalmers and T.-M. Rhyne (Guest Editors) Volume 2 (2), Number 3 A Unified Subdivision Sheme for Polygonal Modeling Jérôme Maillot Jos Stam Alias Wavefront Alias Wavefront 2 King St.
A Novel Bit Level Time Series Representation with Implication of Similarity Search and Clustering
 A Novel Bit Level Time Series Representation with Impliation of Similarity Searh and lustering hotirat Ratanamahatana, Eamonn Keogh, Anthony J. Bagnall 2, and Stefano Lonardi Dept. of omputer Siene & Engineering,
A Novel Bit Level Time Series Representation with Impliation of Similarity Searh and lustering hotirat Ratanamahatana, Eamonn Keogh, Anthony J. Bagnall 2, and Stefano Lonardi Dept. of omputer Siene & Engineering,
arxiv: v1 [cs.gr] 10 Apr 2015
![arxiv: v1 [cs.gr] 10 Apr 2015](/thumbs/92/109500704.jpg "arxiv: v1 [cs.gr] 10 Apr 2015") REAL-TIME TOOL FOR AFFINE TRANSFORMATIONS OF TWO DIMENSIONAL IFS FRACTALS ELENA HADZIEVA AND MARIJA SHUMINOSKA arxiv:1504.02744v1 s.gr 10 Apr 2015 Abstrat. This work introdues a novel tool for interative,
REAL-TIME TOOL FOR AFFINE TRANSFORMATIONS OF TWO DIMENSIONAL IFS FRACTALS ELENA HADZIEVA AND MARIJA SHUMINOSKA arxiv:1504.02744v1 s.gr 10 Apr 2015 Abstrat. This work introdues a novel tool for interative,
Graph-Based vs Depth-Based Data Representation for Multiview Images
 Graph-Based vs Depth-Based Data Representation for Multiview Images Thomas Maugey, Antonio Ortega, Pasal Frossard Signal Proessing Laboratory (LTS), Eole Polytehnique Fédérale de Lausanne (EPFL) Email:
Graph-Based vs Depth-Based Data Representation for Multiview Images Thomas Maugey, Antonio Ortega, Pasal Frossard Signal Proessing Laboratory (LTS), Eole Polytehnique Fédérale de Lausanne (EPFL) Email:
Segmentation of brain MR image using fuzzy local Gaussian mixture model with bias field correction
 IOSR Journal of VLSI and Signal Proessing (IOSR-JVSP) Volume 2, Issue 2 (Mar. Apr. 2013), PP 35-41 e-issn: 2319 4200, p-issn No. : 2319 4197 Segmentation of brain MR image using fuzzy loal Gaussian mixture
IOSR Journal of VLSI and Signal Proessing (IOSR-JVSP) Volume 2, Issue 2 (Mar. Apr. 2013), PP 35-41 e-issn: 2319 4200, p-issn No. : 2319 4197 Segmentation of brain MR image using fuzzy loal Gaussian mixture
Particle Swarm Optimization for the Design of High Diffraction Efficient Holographic Grating
 Original Artile Partile Swarm Optimization for the Design of High Diffration Effiient Holographi Grating A.K. Tripathy 1, S.K. Das, M. Sundaray 3 and S.K. Tripathy* 4 1, Department of Computer Siene, Berhampur
Original Artile Partile Swarm Optimization for the Design of High Diffration Effiient Holographi Grating A.K. Tripathy 1, S.K. Das, M. Sundaray 3 and S.K. Tripathy* 4 1, Department of Computer Siene, Berhampur
Multiple-Criteria Decision Analysis: A Novel Rank Aggregation Method
 3537 Multiple-Criteria Deision Analysis: A Novel Rank Aggregation Method Derya Yiltas-Kaplan Department of Computer Engineering, Istanbul University, 34320, Avilar, Istanbul, Turkey Email: dyiltas@ istanbul.edu.tr
3537 Multiple-Criteria Deision Analysis: A Novel Rank Aggregation Method Derya Yiltas-Kaplan Department of Computer Engineering, Istanbul University, 34320, Avilar, Istanbul, Turkey Email: dyiltas@ istanbul.edu.tr
System-Level Parallelism and Throughput Optimization in Designing Reconfigurable Computing Applications
 System-Level Parallelism and hroughput Optimization in Designing Reonfigurable Computing Appliations Esam El-Araby 1, Mohamed aher 1, Kris Gaj 2, arek El-Ghazawi 1, David Caliga 3, and Nikitas Alexandridis
System-Level Parallelism and hroughput Optimization in Designing Reonfigurable Computing Appliations Esam El-Araby 1, Mohamed aher 1, Kris Gaj 2, arek El-Ghazawi 1, David Caliga 3, and Nikitas Alexandridis
The Implementation of RRTs for a Remote-Controlled Mobile Robot
 ICCAS5 June -5, KINEX, Gyeonggi-Do, Korea he Implementation of RRs for a Remote-Controlled Mobile Robot Chi-Won Roh*, Woo-Sub Lee **, Sung-Chul Kang *** and Kwang-Won Lee **** * Intelligent Robotis Researh
ICCAS5 June -5, KINEX, Gyeonggi-Do, Korea he Implementation of RRs for a Remote-Controlled Mobile Robot Chi-Won Roh*, Woo-Sub Lee **, Sung-Chul Kang *** and Kwang-Won Lee **** * Intelligent Robotis Researh
Torpedo Trajectory Visual Simulation Based on Nonlinear Backstepping Control
 orpedo rajetory Visual Simulation Based on Nonlinear Bakstepping Control Peng Hai-jun 1, Li Hui-zhou Chen Ye 1, 1. Depart. of Weaponry Eng, Naval Univ. of Engineering, Wuhan 400, China. Depart. of Aeronautial
orpedo rajetory Visual Simulation Based on Nonlinear Bakstepping Control Peng Hai-jun 1, Li Hui-zhou Chen Ye 1, 1. Depart. of Weaponry Eng, Naval Univ. of Engineering, Wuhan 400, China. Depart. of Aeronautial
Model Based Approach for Content Based Image Retrievals Based on Fusion and Relevancy Methodology
 The International Arab Journal of Information Tehnology, Vol. 12, No. 6, November 15 519 Model Based Approah for Content Based Image Retrievals Based on Fusion and Relevany Methodology Telu Venkata Madhusudhanarao
The International Arab Journal of Information Tehnology, Vol. 12, No. 6, November 15 519 Model Based Approah for Content Based Image Retrievals Based on Fusion and Relevany Methodology Telu Venkata Madhusudhanarao
the data. Structured Principal Component Analysis (SPCA)
") Strutured Prinipal Component Analysis Kristin M. Branson and Sameer Agarwal Department of Computer Siene and Engineering University of California, San Diego La Jolla, CA 9193-114 Abstrat Many tasks involving
Strutured Prinipal Component Analysis Kristin M. Branson and Sameer Agarwal Department of Computer Siene and Engineering University of California, San Diego La Jolla, CA 9193-114 Abstrat Many tasks involving
Sequential Incremental-Value Auctions
 Sequential Inremental-Value Autions Xiaoming Zheng and Sven Koenig Department of Computer Siene University of Southern California Los Angeles, CA 90089-0781 {xiaominz,skoenig}@us.edu Abstrat We study the
Sequential Inremental-Value Autions Xiaoming Zheng and Sven Koenig Department of Computer Siene University of Southern California Los Angeles, CA 90089-0781 {xiaominz,skoenig}@us.edu Abstrat We study the
Adaptation of Rigid Registration Algorithm to the Fingerprints Identification
 Amerian Journal of Software Engineering and Appliations 205; 4(6): 07-4 Published online Otober 8, 205 (http://www.sienepublishinggroup.om/j/ajsea) doi: 0.648/j.ajsea.2050406.2 ISSN: 2327-2473 (Print);
Amerian Journal of Software Engineering and Appliations 205; 4(6): 07-4 Published online Otober 8, 205 (http://www.sienepublishinggroup.om/j/ajsea) doi: 0.648/j.ajsea.2050406.2 ISSN: 2327-2473 (Print);
Wide-baseline Multiple-view Correspondences
 Wide-baseline Multiple-view Correspondenes Vittorio Ferrari, Tinne Tuytelaars, Lu Van Gool, Computer Vision Group (BIWI), ETH Zuerih, Switzerland ESAT-PSI, University of Leuven, Belgium {ferrari,vangool}@vision.ee.ethz.h,
Wide-baseline Multiple-view Correspondenes Vittorio Ferrari, Tinne Tuytelaars, Lu Van Gool, Computer Vision Group (BIWI), ETH Zuerih, Switzerland ESAT-PSI, University of Leuven, Belgium {ferrari,vangool}@vision.ee.ethz.h,
An Alternative Approach to the Fuzzifier in Fuzzy Clustering to Obtain Better Clustering Results
 An Alternative Approah to the Fuzziier in Fuzzy Clustering to Obtain Better Clustering Results Frank Klawonn Department o Computer Siene University o Applied Sienes BS/WF Salzdahlumer Str. 46/48 D-38302
An Alternative Approah to the Fuzziier in Fuzzy Clustering to Obtain Better Clustering Results Frank Klawonn Department o Computer Siene University o Applied Sienes BS/WF Salzdahlumer Str. 46/48 D-38302
Relevance for Computer Vision
 The Geometry of ROC Spae: Understanding Mahine Learning Metris through ROC Isometris, by Peter A. Flah International Conferene on Mahine Learning (ICML-23) http://www.s.bris.a.uk/publiations/papers/74.pdf
The Geometry of ROC Spae: Understanding Mahine Learning Metris through ROC Isometris, by Peter A. Flah International Conferene on Mahine Learning (ICML-23) http://www.s.bris.a.uk/publiations/papers/74.pdf
Fast Rigid Motion Segmentation via Incrementally-Complex Local Models
 Fast Rigid Motion Segmentation via Inrementally-Complex Loal Models Fernando Flores-Mangas Allan D. Jepson Department of Computer Siene, University of Toronto {mangas,jepson}@s.toronto.edu Abstrat The
Fast Rigid Motion Segmentation via Inrementally-Complex Loal Models Fernando Flores-Mangas Allan D. Jepson Department of Computer Siene, University of Toronto {mangas,jepson}@s.toronto.edu Abstrat The
A Fast Kernel-based Multilevel Algorithm for Graph Clustering
 A Fast Kernel-based Multilevel Algorithm for Graph Clustering Inderjit Dhillon Dept. of Computer Sienes University of Texas at Austin Austin, TX 78712 inderjit@s.utexas.edu Yuqiang Guan Dept. of Computer
A Fast Kernel-based Multilevel Algorithm for Graph Clustering Inderjit Dhillon Dept. of Computer Sienes University of Texas at Austin Austin, TX 78712 inderjit@s.utexas.edu Yuqiang Guan Dept. of Computer
Color Image Fusion for Concealed Weapon Detection
 In: E.M. Carapezza (Ed.), Sensors, and ommand, ontrol, ommuniations, and intelligene (C3I) tehnologies for homeland defense and law enforement II, SPIE-571 (pp. 372-379). Bellingham, WA., USA: The International
In: E.M. Carapezza (Ed.), Sensors, and ommand, ontrol, ommuniations, and intelligene (C3I) tehnologies for homeland defense and law enforement II, SPIE-571 (pp. 372-379). Bellingham, WA., USA: The International
An Automatic Laser Scanning System for Accurate 3D Reconstruction of Indoor Scenes
 An Automati Laser Sanning System for Aurate 3D Reonstrution of Indoor Senes Danrong Li, Honglong Zhang, and Zhan Song Shenzhen Institutes of Advaned Tehnology Chinese Aademy of Sienes Shenzhen, Guangdong
An Automati Laser Sanning System for Aurate 3D Reonstrution of Indoor Senes Danrong Li, Honglong Zhang, and Zhan Song Shenzhen Institutes of Advaned Tehnology Chinese Aademy of Sienes Shenzhen, Guangdong
On - Line Path Delay Fault Testing of Omega MINs M. Bellos 1, E. Kalligeros 1, D. Nikolos 1,2 & H. T. Vergos 1,2
 On - Line Path Delay Fault Testing of Omega MINs M. Bellos, E. Kalligeros, D. Nikolos,2 & H. T. Vergos,2 Dept. of Computer Engineering and Informatis 2 Computer Tehnology Institute University of Patras,
On - Line Path Delay Fault Testing of Omega MINs M. Bellos, E. Kalligeros, D. Nikolos,2 & H. T. Vergos,2 Dept. of Computer Engineering and Informatis 2 Computer Tehnology Institute University of Patras,
Unsupervised Stereoscopic Video Object Segmentation Based on Active Contours and Retrainable Neural Networks
 Unsupervised Stereosopi Video Objet Segmentation Based on Ative Contours and Retrainable Neural Networks KLIMIS NTALIANIS, ANASTASIOS DOULAMIS, and NIKOLAOS DOULAMIS National Tehnial University of Athens
Unsupervised Stereosopi Video Objet Segmentation Based on Ative Contours and Retrainable Neural Networks KLIMIS NTALIANIS, ANASTASIOS DOULAMIS, and NIKOLAOS DOULAMIS National Tehnial University of Athens
Mean Deviation Similarity Index: Efficient and Reliable Full-Reference Image Quality Evaluator
 1 Mean Deviation Similarity Index: Effiient and Reliable Full-Referene Image Quality Evaluator Hossein Ziaei Nafhi, Atena Shahkolaei, Rahid Hedjam, and Mohamed Cheriet, Senior Member, IEEE two images of
1 Mean Deviation Similarity Index: Effiient and Reliable Full-Referene Image Quality Evaluator Hossein Ziaei Nafhi, Atena Shahkolaei, Rahid Hedjam, and Mohamed Cheriet, Senior Member, IEEE two images of
Capturing Large Intra-class Variations of Biometric Data by Template Co-updating
 Capturing Large Intra-lass Variations of Biometri Data by Template Co-updating Ajita Rattani University of Cagliari Piazza d'armi, Cagliari, Italy ajita.rattani@diee.unia.it Gian Lua Marialis University
Capturing Large Intra-lass Variations of Biometri Data by Template Co-updating Ajita Rattani University of Cagliari Piazza d'armi, Cagliari, Italy ajita.rattani@diee.unia.it Gian Lua Marialis University
TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM
 TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM M. Murugeswari 1, M.Gayathri 2 1 Assoiate Professor, 2 PG Sholar 1,2 K.L.N College of Information
TUMOR DETECTION IN MRI BRAIN IMAGE SEGMENTATION USING PHASE CONGRUENCY MODIFIED FUZZY C MEAN ALGORITHM M. Murugeswari 1, M.Gayathri 2 1 Assoiate Professor, 2 PG Sholar 1,2 K.L.N College of Information
SURVEY ON MEDICAL IMAGE SEGMENTATION USING ENHANCED K-MEANS AND KERNELIZED FUZZY C- MEANS
 SURVEY ON MEDICAL IMAGE SEGMENTATION USING ENHANCED K-MEANS AND KERNELIZED FUZZY C- MEANS Gunwanti S. Mahajan & Kanhan S. Bhagat. Dept of E &TC, J. T. Mahajan C.o.E Faizpur, India ABSTRACT Diagnosti imaging
SURVEY ON MEDICAL IMAGE SEGMENTATION USING ENHANCED K-MEANS AND KERNELIZED FUZZY C- MEANS Gunwanti S. Mahajan & Kanhan S. Bhagat. Dept of E &TC, J. T. Mahajan C.o.E Faizpur, India ABSTRACT Diagnosti imaging
HEXA: Compact Data Structures for Faster Packet Processing
 Washington University in St. Louis Washington University Open Sholarship All Computer Siene and Engineering Researh Computer Siene and Engineering Report Number: 27-26 27 HEXA: Compat Data Strutures for
Washington University in St. Louis Washington University Open Sholarship All Computer Siene and Engineering Researh Computer Siene and Engineering Report Number: 27-26 27 HEXA: Compat Data Strutures for
A scheme for racquet sports video analysis with the combination of audio-visual information
 A sheme for raquet sports video analysis with the ombination of audio-visual information Liyuan Xing a*, Qixiang Ye b, Weigang Zhang, Qingming Huang a and Hua Yu a a Graduate Shool of the Chinese Aadamy
A sheme for raquet sports video analysis with the ombination of audio-visual information Liyuan Xing a*, Qixiang Ye b, Weigang Zhang, Qingming Huang a and Hua Yu a a Graduate Shool of the Chinese Aadamy
Projections. Let us start with projections in 2D, because there are easier to visualize.
 Projetions Let us start ith projetions in D, beause there are easier to visualie. Projetion parallel to the -ais: Ever point in the -plane ith oordinates (, ) ill be transformed into the point ith oordinates
Projetions Let us start ith projetions in D, beause there are easier to visualie. Projetion parallel to the -ais: Ever point in the -plane ith oordinates (, ) ill be transformed into the point ith oordinates
An Efficient and Scalable Approach to CNN Queries in a Road Network
 An Effiient and Salable Approah to CNN Queries in a Road Network Hyung-Ju Cho Chin-Wan Chung Dept. of Eletrial Engineering & Computer Siene Korea Advaned Institute of Siene and Tehnology 373- Kusong-dong,
An Effiient and Salable Approah to CNN Queries in a Road Network Hyung-Ju Cho Chin-Wan Chung Dept. of Eletrial Engineering & Computer Siene Korea Advaned Institute of Siene and Tehnology 373- Kusong-dong,
Polyhedron Volume-Ratio-based Classification for Image Recognition
 Polyhedron Volume-Ratio-based Classifiation for Image Reognition Qingxiang Feng, Jeng-Shyang Pan, Senior Member, IEEE, Jar-Ferr Yang, Fellow, IEEE and Yang-ing Chou Abstrat In this paper, a novel method,
Polyhedron Volume-Ratio-based Classifiation for Image Reognition Qingxiang Feng, Jeng-Shyang Pan, Senior Member, IEEE, Jar-Ferr Yang, Fellow, IEEE and Yang-ing Chou Abstrat In this paper, a novel method,
Analysis of input and output configurations for use in four-valued CCD programmable logic arrays
 nalysis of input and output onfigurations for use in four-valued D programmable logi arrays J.T. utler H.G. Kerkhoff ndexing terms: Logi, iruit theory and design, harge-oupled devies bstrat: s in binary,
nalysis of input and output onfigurations for use in four-valued D programmable logi arrays J.T. utler H.G. Kerkhoff ndexing terms: Logi, iruit theory and design, harge-oupled devies bstrat: s in binary,
Simultaneous image orientation in GRASS
 Simultaneous image orientation in GRASS Alessandro BERGAMINI, Alfonso VITTI, Paolo ATELLI Dipartimento di Ingegneria Civile e Ambientale, Università degli Studi di Trento, via Mesiano 77, 38 Trento, tel.
Simultaneous image orientation in GRASS Alessandro BERGAMINI, Alfonso VITTI, Paolo ATELLI Dipartimento di Ingegneria Civile e Ambientale, Università degli Studi di Trento, via Mesiano 77, 38 Trento, tel.
Phasor Imaging: A Generalization of Correlation-Based Time-of-Flight Imaging
 Phasor Imaging: A Generalization of Correlation-Based Time-of-Flight Imaging MOHIT GUPTA and SHREE K. NAYAR Columbia University and MATTHIAS B. HULLIN and JAIME MARTIN University of Bonn In orrelation-based
Phasor Imaging: A Generalization of Correlation-Based Time-of-Flight Imaging MOHIT GUPTA and SHREE K. NAYAR Columbia University and MATTHIAS B. HULLIN and JAIME MARTIN University of Bonn In orrelation-based
DATA ACQUISITION AND PROCESSING OF PARALLEL FREQUENCY SAR BASED ON COMPRESSIVE SENSING
 Progress In Eletromagnetis Researh, Vol. 133, 199 215, 2013 DATA ACQUISITION AND PROCESSING OF PARALLEL FREQUENCY SAR BASED ON COMPRESSIVE SENSING Y. N. You, H. P. Xu *, C. S. Li, and L. Q. Zhang Shool
Progress In Eletromagnetis Researh, Vol. 133, 199 215, 2013 DATA ACQUISITION AND PROCESSING OF PARALLEL FREQUENCY SAR BASED ON COMPRESSIVE SENSING Y. N. You, H. P. Xu *, C. S. Li, and L. Q. Zhang Shool
Vertex Unfoldings of Orthogonal Polyhedra: Positive, Negative, and Inconclusive Results
 CCCG 2018, Winnipeg, Canada, August 8 10, 2018 Vertex Unfoldings of Orthogonal Polyhedra: Positive, Negative, and Inonlusive Results Luis A. Garia Andres Gutierrrez Isaa Ruiz Andrew Winslow Abstrat We
CCCG 2018, Winnipeg, Canada, August 8 10, 2018 Vertex Unfoldings of Orthogonal Polyhedra: Positive, Negative, and Inonlusive Results Luis A. Garia Andres Gutierrrez Isaa Ruiz Andrew Winslow Abstrat We
Comparative Analysis of two Types of Leg-observation-based Visual Servoing Approaches for the Control of a Five-bar Mechanism
 Proeedings of Australasian Conferene on Robotis and Automation, 2-4 De 2014, The University of Melbourne, Melbourne, Australia Comparative Analysis of two Types of Leg-observation-based Visual Servoing
Proeedings of Australasian Conferene on Robotis and Automation, 2-4 De 2014, The University of Melbourne, Melbourne, Australia Comparative Analysis of two Types of Leg-observation-based Visual Servoing
Time delay estimation of reverberant meeting speech: on the use of multichannel linear prediction
 University of Wollongong Researh Online Faulty of Informatis - apers (Arhive) Faulty of Engineering and Information Sienes 7 Time delay estimation of reverberant meeting speeh: on the use of multihannel
University of Wollongong Researh Online Faulty of Informatis - apers (Arhive) Faulty of Engineering and Information Sienes 7 Time delay estimation of reverberant meeting speeh: on the use of multihannel