Eagle Knights: RoboCup Small Size League. Dr. Alfredo Weitzenfeld ITAM - Mexico
|
|
|
- Baldwin Morgan
- 5 years ago
- Views:
Transcription


1 Eagle Knights: RoboCup Small Size League Dr. Alfredo Weitzenfeld ITAM - Mexico

2 Playing Field and Robot Size camera 15 cm 4 m 18 cm 4 m 5.5 m
3 Distributed Robot Control


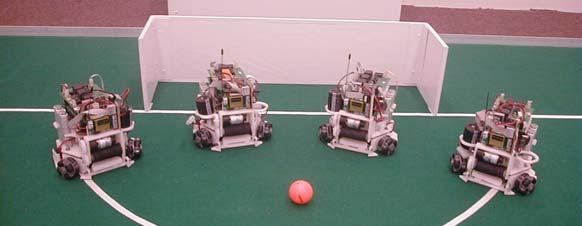

4 Eagle Knights ( )
5 Robot System Object Recognition & Identification Robot Position & Orientation Game Controller Game States & Referee Commands Wireless Communication Motion Control Vision Localization Artificial Intelligence Wireless Communication : Global Vision (multiple cameras), remote processing
6 Vision COLOR CALIBRATION IMAGE CAPTURE SEGMENTATION RECOGNITION IDENTIFICATION Object Recognition & Identification
 Frequency (30 fps - frames per second) Resolution (320 x 240")
7 Image Capture Two color digital video cameras with IEEE1394/FireWire (previously analog cameras and PC video board with SVideo) Frequency (30 fps - frames per second) Resolution (320 x 240 pixels)
,")
")

8 Color Calibration YUV luminosity (Y), chromaticity (UV) 5 colors: ball (orange) and markers/patches (yellow, blue, light green, white)
9 Segmentation Classify and filter 5 colors orange, yellow, blue, light green, white
10 Segmentation Blob Formation RLE - Run Length Encoding* Color region compression algorithm Pixel lines, y: 0-143, x: *
 Adversary - Complementary central markers")
11 Ball (orange) Robots Recognition Own - Central markers (yellow/blue) Adversary - Complementary central markers (blue/yellow)
12 Identification Ball Robots Own - Surrounding markers (light green, white)
13 Localization GEOMETRIC CALIBRATION Object Recognition & Identification POSITION ORIENTATION Object Position & Orientation
![Localization Geometric Calibration Calculate Lens Distorsion Tsai [1987]](/docs-images/83/87872707/images/14-1.jpg "algorithm to eliminate camera lens distorsion. R. Y.")

14 Localization Geometric Calibration Calculate Lens Distorsion Tsai [1987] algorithm to eliminate camera lens distorsion. R. Y. Tsai, A Versatile Camera Calibration Technique for High-Accuracy 3D Machine Vision Metrology Using Off-the-Shelf TV Cameras and Lenses, IEEE Journal of Robotics and Automation,vol. 3, pp , 1987.

 MidField")
15 Geometric Calibration Localization Calculate Image Overlap Field Corners (2 points) MidField (overlapping 3 points)

16 Localization Position Calculation Compute Object Centroids Apply Lens Correction to Centroids Transform to Field Coordinates

17 Localization Orientation Calculation Compute robot surrounding markers centroids Compute robot surrounding markers relative position Compute robot surrounding markers orientation
18 Artificial Intelligence GAME CONTROLLER Object Position & Orientation BEHAVIORS COLLISION DETECTION MOTION CONTROL Motion Control

19 Game Controller Computer controlled by human referee sending game states to teams.

20 Behaviors Control Interface Roles Goalie Defender Attacker Kicking Direction Active Robots Strategy Defensive Offensive
21 Behaviors Basic Reach & Kick Behavior ball_near Reach Ball ball_far Circle Ball Kick Ball ball_very_near Zone Goalie Defender Attacker Reach & Kick Pass Receive Track Ball/Player Special Plays
22 Collision Detection Collision Avoidance
 Transceiver (413/433 MHz or 869/914 MHz) Single/Dual")
23 Wireless Communication Communication Motion Commands (wheels & dribbler) Action Commands (kicker) 20 byte messages (4 bytes per robot) Transceiver (413/433 MHz or 869/914 MHz) Single/Dual Direction
24 Differential (2003) Orientation Motion Control Forward/Backward Motion Omnidirectional (Holonomic) Integrated Vector Motion 3 wheels (2004) 4 wheels (2005)
25 Motion Control Motor Commands Transceiver Motor Encoder PID PWM PWM corrected DSP
 DIGITAL SIGNAL PROCESSOR (DSP-TI-2812) DRIBBLER CONTROL KICKER CONTROL")
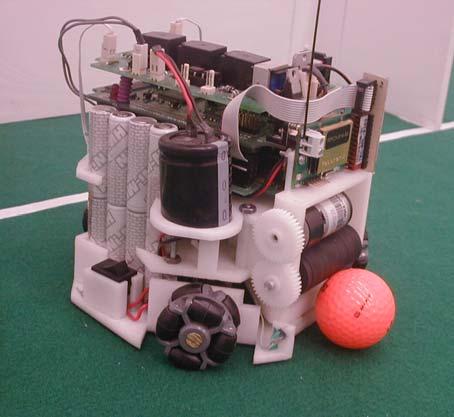
26 Robot Design MOTOR (4) ENCODER (4) MOTION CONTROL WIRELESS COMMUNICATION (Transceiver) DIGITAL SIGNAL PROCESSOR (DSP-TI-2812) DRIBBLER CONTROL KICKER CONTROL MOTOR SOLENOID

 9th World RoboCup,")

 1st US Open Robocup, Pittsburgh, May")
27 Eagle Knights SSL Results th World RoboCup, Bremen, Germany, June 2006 (1st round) 1st Latin American RoboCup Open, Sao Luis, Brasil, Sept 2005 (1st place) 9th World RoboCup, Osaka, Japan, July 2005 (1st round) 3rd Latin American Robotics Comp, Mexico City, Oct 2004 (1st place) 2nd US Open Robocup, New Orleans, May 2004 (2nd place) 1st US Open Robocup, Pittsburgh, May 2003 (3rd place)
Eagle Knights 2007: Four-Legged League
 Eagle Knights 2007: Four-Legged League Alfredo Weitzenfeld 1, Alonso Martínez 1, Bernardo Muciño 1, Gabriela Serrano 1, Carlos Ramos 1, and Carlos Rivera 1 1 Robotics Laboratory Lab, ITAM, Rio Hondo 1,
Eagle Knights 2007: Four-Legged League Alfredo Weitzenfeld 1, Alonso Martínez 1, Bernardo Muciño 1, Gabriela Serrano 1, Carlos Ramos 1, and Carlos Rivera 1 1 Robotics Laboratory Lab, ITAM, Rio Hondo 1,
NuBot Team Description Paper 2013
 NuBot Team Description Paper 2013 Zhiwen Zeng, Dan Xiong, Qinghua Yu, Kaihong Huang, Shuai Cheng, Huimin Lu, Xiangke Wang, Hui Zhang, Xun Li, Zhiqiang Zheng College of Mechatronics and Automation, National
NuBot Team Description Paper 2013 Zhiwen Zeng, Dan Xiong, Qinghua Yu, Kaihong Huang, Shuai Cheng, Huimin Lu, Xiangke Wang, Hui Zhang, Xun Li, Zhiqiang Zheng College of Mechatronics and Automation, National
Dept. of Adaptive Machine Systems, Graduate School of Engineering Osaka University, Suita, Osaka , Japan
 An Application of Vision-Based Learning for a Real Robot in RoboCup - A Goal Keeping Behavior for a Robot with an Omnidirectional Vision and an Embedded Servoing - Sho ji Suzuki 1, Tatsunori Kato 1, Hiroshi
An Application of Vision-Based Learning for a Real Robot in RoboCup - A Goal Keeping Behavior for a Robot with an Omnidirectional Vision and an Embedded Servoing - Sho ji Suzuki 1, Tatsunori Kato 1, Hiroshi
Behavior Learning for a Mobile Robot with Omnidirectional Vision Enhanced by an Active Zoom Mechanism
 Behavior Learning for a Mobile Robot with Omnidirectional Vision Enhanced by an Active Zoom Mechanism Sho ji Suzuki, Tatsunori Kato, Minoru Asada, and Koh Hosoda Dept. of Adaptive Machine Systems, Graduate
Behavior Learning for a Mobile Robot with Omnidirectional Vision Enhanced by an Active Zoom Mechanism Sho ji Suzuki, Tatsunori Kato, Minoru Asada, and Koh Hosoda Dept. of Adaptive Machine Systems, Graduate
Horus: Object Orientation and Id without Additional Markers
 Computer Science Department of The University of Auckland CITR at Tamaki Campus (http://www.citr.auckland.ac.nz) CITR-TR-74 November 2000 Horus: Object Orientation and Id without Additional Markers Jacky
Computer Science Department of The University of Auckland CITR at Tamaki Campus (http://www.citr.auckland.ac.nz) CITR-TR-74 November 2000 Horus: Object Orientation and Id without Additional Markers Jacky
Toward an Undergraduate League for RoboCup.
 Toward an Undergraduate League for RoboCup. John Anderson, Jacky Baltes, David Livingston, Elizabeth Sklar, and Jonah Tower Department of Computer Science Columbia University New York, NY, 10027, USA sklar,jpt2002@cs.columbia.edu
Toward an Undergraduate League for RoboCup. John Anderson, Jacky Baltes, David Livingston, Elizabeth Sklar, and Jonah Tower Department of Computer Science Columbia University New York, NY, 10027, USA sklar,jpt2002@cs.columbia.edu
Real-Time Color Coded Object Detection Using a Modular Computer Vision Library
 Real-Time Color Coded Object Detection Using a Modular Computer Vision Library Alina Trifan 1, António J. R. Neves 2, Bernardo Cunha 3 and José Luís Azevedo 4 1 IEETA/ DETI, University of Aveiro Aveiro,
Real-Time Color Coded Object Detection Using a Modular Computer Vision Library Alina Trifan 1, António J. R. Neves 2, Bernardo Cunha 3 and José Luís Azevedo 4 1 IEETA/ DETI, University of Aveiro Aveiro,
2010 Team Description Paper: UBC Thunderbots
 2010 Team Description Paper: UBC Thunderbots Alim Jiwa, Byron Knoll, Christopher Head, Howard Hu, Jonathan Fraser, Jonathan Serion, Kevin Baillie, Lok Tin Lam The University of British Columbia 2329 West
2010 Team Description Paper: UBC Thunderbots Alim Jiwa, Byron Knoll, Christopher Head, Howard Hu, Jonathan Fraser, Jonathan Serion, Kevin Baillie, Lok Tin Lam The University of British Columbia 2329 West
A Real Time Vision System for Robotic Soccer
 A Real Time Vision System for Robotic Soccer Chunmiao Wang, Hui Wang, William Y. C. Soh, Han Wang Division of Control & Instrumentation, School of EEE, Nanyang Technological University, 4 Nanyang Avenue,
A Real Time Vision System for Robotic Soccer Chunmiao Wang, Hui Wang, William Y. C. Soh, Han Wang Division of Control & Instrumentation, School of EEE, Nanyang Technological University, 4 Nanyang Avenue,
Using Layered Color Precision for a Self-Calibrating Vision System
 ROBOCUP2004 SYMPOSIUM, Instituto Superior Técnico, Lisboa, Portugal, July 4-5, 2004. Using Layered Color Precision for a Self-Calibrating Vision System Matthias Jüngel Institut für Informatik, LFG Künstliche
ROBOCUP2004 SYMPOSIUM, Instituto Superior Técnico, Lisboa, Portugal, July 4-5, 2004. Using Layered Color Precision for a Self-Calibrating Vision System Matthias Jüngel Institut für Informatik, LFG Künstliche
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines
 Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
Particle-Filter-Based Self-Localization Using Landmarks and Directed Lines Thomas Röfer 1, Tim Laue 1, and Dirk Thomas 2 1 Center for Computing Technology (TZI), FB 3, Universität Bremen roefer@tzi.de,
A Study on the Distortion Correction Methodology of Vision Sensor
 , July 2-4, 2014, London, U.K. A Study on the Distortion Correction Methodology of Vision Sensor Younghoon Kho, Yongjin (James) Kwon 1 Abstract This study investigates a simple and effective vision calibration
, July 2-4, 2014, London, U.K. A Study on the Distortion Correction Methodology of Vision Sensor Younghoon Kho, Yongjin (James) Kwon 1 Abstract This study investigates a simple and effective vision calibration
The University of Pennsylvania Robocup 2011 SPL Nao Soccer Team
 The University of Pennsylvania Robocup 2011 SPL Nao Soccer Team General Robotics Automation, Sensing and Perception (GRASP) Laboratory University of Pennsylvania, Philadelphia, PA 19104 Abstract. This
The University of Pennsylvania Robocup 2011 SPL Nao Soccer Team General Robotics Automation, Sensing and Perception (GRASP) Laboratory University of Pennsylvania, Philadelphia, PA 19104 Abstract. This
Nao Devils Dortmund. Team Description Paper for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
RoboFEI 2011 Team Description Paper
 RoboFEI 2011 Team Description Paper José Angelo Gurzoni Jr. 2, Gabriel Francischini 1, Daniel Malheiro 1, Milton Cortez 3, Felipe Camargo 1, Felipe Fill 1, Rodolpho L. Felizatti 2, Paloma Bellatrix 2,
RoboFEI 2011 Team Description Paper José Angelo Gurzoni Jr. 2, Gabriel Francischini 1, Daniel Malheiro 1, Milton Cortez 3, Felipe Camargo 1, Felipe Fill 1, Rodolpho L. Felizatti 2, Paloma Bellatrix 2,
BabyTigers-98: Osaka Legged Robot Team
 BabyTigers-98: saka Legged Robot Team Noriaki Mitsunaga and Minoru Asada and Chizuko Mishima Dept. of Adaptive Machine Systems, saka niversity, Suita, saka, 565-0871, Japan Abstract. The saka Legged Robot
BabyTigers-98: saka Legged Robot Team Noriaki Mitsunaga and Minoru Asada and Chizuko Mishima Dept. of Adaptive Machine Systems, saka niversity, Suita, saka, 565-0871, Japan Abstract. The saka Legged Robot
Camera Calibration Utility Description
 Camera Calibration Utility Description Robert Bryll, Xinfeng Ma, Francis Quek Vision Interfaces and Systems Laboratory The university of Illinois at Chicago April 6, 1999 1 Introduction To calibrate our
Camera Calibration Utility Description Robert Bryll, Xinfeng Ma, Francis Quek Vision Interfaces and Systems Laboratory The university of Illinois at Chicago April 6, 1999 1 Introduction To calibrate our
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD
 DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
Borregos Salvajes RoboCup 2002 Sony Legged Robot League Team
 Borregos Salvajes RoboCup 2002 Sony Legged Robot League Team Alejandro Aceves L, Ma. de los Angeles Junco R, Jorge Ramírez U, Ricardo Swain O *, Raziel Alvarez, Iván Canales, Miguel A. González, Marisol
Borregos Salvajes RoboCup 2002 Sony Legged Robot League Team Alejandro Aceves L, Ma. de los Angeles Junco R, Jorge Ramírez U, Ricardo Swain O *, Raziel Alvarez, Iván Canales, Miguel A. González, Marisol
(a) (b) (c) Fig. 1. Omnidirectional camera: (a) principle; (b) physical construction; (c) captured. of a local vision system is more challenging than
 (b) (c) Fig. 1. Omnidirectional camera: (a) principle; (b) physical construction; (c) captured. of a local vision system is more challenging than") An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
Robust and Accurate Detection of Object Orientation and ID without Color Segmentation
 0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
DRC A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking. Viboon Sangveraphunsiri*, Kritsana Uttamang, and Pongsakon Pedpunsri
 The 23 rd Conference of the Mechanical Engineering Network of Thailand November 4 7, 2009, Chiang Mai A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking Viboon Sangveraphunsiri*, Kritsana Uttamang,
The 23 rd Conference of the Mechanical Engineering Network of Thailand November 4 7, 2009, Chiang Mai A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking Viboon Sangveraphunsiri*, Kritsana Uttamang,
B-Smart. Extended Team Description for RoboCup 2009
 B-Smart (Bremen Small Multi Agent Robot Team) Extended Team Description for RoboCup 2009 Tim Laue 1, Armin Burchardt 2, Sebastian Fritsch 2, Sven Hinz 2, Kamil Huhn 2, Teodosiy Kirilov 2, Alexander Martens
B-Smart (Bremen Small Multi Agent Robot Team) Extended Team Description for RoboCup 2009 Tim Laue 1, Armin Burchardt 2, Sebastian Fritsch 2, Sven Hinz 2, Kamil Huhn 2, Teodosiy Kirilov 2, Alexander Martens
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision
 A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
Vision-based schemas for an autonomous robotic soccer player
 Submitted to WAF 2003 April 2003 (Alicante, Spain) Vision-based schemas for an autonomous robotic soccer player Víctor M. Gómez José M. Cañas Félix San Martín Vicente Matellán Abstract This article describes
Submitted to WAF 2003 April 2003 (Alicante, Spain) Vision-based schemas for an autonomous robotic soccer player Víctor M. Gómez José M. Cañas Félix San Martín Vicente Matellán Abstract This article describes
AUTONOMOUS MULTI-ROBOT SOCCER. A Major Qualifying Project Report. Submitted to the Faculty. of the WORCESTER POLYTECHNIC INSTITUTE
 Project Number: AUTONOMOUS MULTI-ROBOT SOCCER A Major Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree
Project Number: AUTONOMOUS MULTI-ROBOT SOCCER A Major Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree
UPennalizers. RoboCup Standard Platform League Team Report 2010
 UPennalizers RoboCup Standard Platform League Team Report 2010 Jordan Brindza, Levi Cai, Ashleigh Thomas, Ross Boczar, Alyin Caliskan, Alexandra Lee, Anirudha Majumdar, Roman Shor, Barry Scharfman, Dan
UPennalizers RoboCup Standard Platform League Team Report 2010 Jordan Brindza, Levi Cai, Ashleigh Thomas, Ross Boczar, Alyin Caliskan, Alexandra Lee, Anirudha Majumdar, Roman Shor, Barry Scharfman, Dan
MATRIX: A force field pattern matching method for mobile robots
 MATRIX: A force field pattern matching method for mobile robots Felix von Hundelshausen, Michael Schreiber, Fabian Wiesel, Achim Liers, and Raúl Rojas Technical Report B-8-3 Freie Universität Berlin, Takustraße
MATRIX: A force field pattern matching method for mobile robots Felix von Hundelshausen, Michael Schreiber, Fabian Wiesel, Achim Liers, and Raúl Rojas Technical Report B-8-3 Freie Universität Berlin, Takustraße
using an omnidirectional camera, sufficient information for controlled play can be collected. Another example for the use of omnidirectional cameras i
 An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
Continuous Valued Q-learning for Vision-Guided Behavior Acquisition
 Continuous Valued Q-learning for Vision-Guided Behavior Acquisition Yasutake Takahashi, Masanori Takeda, and Minoru Asada Dept. of Adaptive Machine Systems Graduate School of Engineering Osaka University
Continuous Valued Q-learning for Vision-Guided Behavior Acquisition Yasutake Takahashi, Masanori Takeda, and Minoru Asada Dept. of Adaptive Machine Systems Graduate School of Engineering Osaka University
FutBotIII: Towards a Robust Centralized Vision System for RoboCup Small League
 RoboCup-99 Team Descriptions Small Robots League, Team FutBotIII, pages 43 47 http: /www.ep.liu.se/ea/cis/1999/006/07/ 43 FutBotIII: Towards a Robust Centralized Vision System for RoboCup Small League
RoboCup-99 Team Descriptions Small Robots League, Team FutBotIII, pages 43 47 http: /www.ep.liu.se/ea/cis/1999/006/07/ 43 FutBotIII: Towards a Robust Centralized Vision System for RoboCup Small League
Motion Control in Dynamic Multi-Robot Environments
 Motion Control in Dynamic Multi-Robot Environments Michael Bowling mhb@cs.cmu.edu Manuela Veloso mmv@cs.cmu.edu Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213-3890 Abstract
Motion Control in Dynamic Multi-Robot Environments Michael Bowling mhb@cs.cmu.edu Manuela Veloso mmv@cs.cmu.edu Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213-3890 Abstract
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
Discuss Proven technologies that addresses
 Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Robotics and Machine Vision for assembly -Auto Teach, Vision guidance, Color & 3D Mar 5-12 2007 Agenda Discuss Proven technologies that addresses o Quick Tool Bring up o Using Non-touch Vision based Auto
Team Research Report 2009
 Team Research Report 2009 Prof. Dr. Karl-Udo Jahn, Daniel Borkmann, Thomas Reinhardt, Rico Tilgner, Nils Rexin, Stefan Seering Leipzig University of Applied Sciences, Faculty of Computer Science, Mathematics,
Team Research Report 2009 Prof. Dr. Karl-Udo Jahn, Daniel Borkmann, Thomas Reinhardt, Rico Tilgner, Nils Rexin, Stefan Seering Leipzig University of Applied Sciences, Faculty of Computer Science, Mathematics,
CMDragons 2007 Team Description
 CMDragons 2007 Team Description James Bruce Stefan Zickler Mike Licitra Manuela Veloso December 2007 CMU-CS-07-173 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract We
CMDragons 2007 Team Description James Bruce Stefan Zickler Mike Licitra Manuela Veloso December 2007 CMU-CS-07-173 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Abstract We
PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1. We present some preliminary results on a system for tracking 3D motion using
 PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1 Tak-keung CHENG derek@cs.mu.oz.au Leslie KITCHEN ljk@cs.mu.oz.au Computer Vision and Pattern Recognition Laboratory, Department of Computer Science,
PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1 Tak-keung CHENG derek@cs.mu.oz.au Leslie KITCHEN ljk@cs.mu.oz.au Computer Vision and Pattern Recognition Laboratory, Department of Computer Science,
Document downloaded from: The final publication is available at: Copyright.
 Document downloaded from: http://hdl.handle.net/1459.1/62843 The final publication is available at: https://doi.org/1.17/978-3-319-563-8_4 Copyright Springer International Publishing Switzerland, 213 Evaluation
Document downloaded from: http://hdl.handle.net/1459.1/62843 The final publication is available at: https://doi.org/1.17/978-3-319-563-8_4 Copyright Springer International Publishing Switzerland, 213 Evaluation
Festo LOGISTICS COMPETITION 2011
 Festo LOGISTICS COMPETITION 2011 ENGINEERING REFERENCE 013 This booklet includes descriptions and features of the Robotino platform and hardware incorporated into the competition area. Index 1.1 The Mobile
Festo LOGISTICS COMPETITION 2011 ENGINEERING REFERENCE 013 This booklet includes descriptions and features of the Robotino platform and hardware incorporated into the competition area. Index 1.1 The Mobile
CAMBADA 2016: Team Description Paper
 CAMBADA 2016: Team Description Paper R. Dias, F. Amaral, J. L. Azevedo, B. Cunha, P. Dias, N. Lau, A. J. R. Neves, E. Pedrosa, A. Pereira, J. Silva and A. Trifan Intelligent Robotics and Intelligent Systems
CAMBADA 2016: Team Description Paper R. Dias, F. Amaral, J. L. Azevedo, B. Cunha, P. Dias, N. Lau, A. J. R. Neves, E. Pedrosa, A. Pereira, J. Silva and A. Trifan Intelligent Robotics and Intelligent Systems
The UPennalizers RoboCup 2015 Standard Platform League Team Description Paper
 The UPennalizers RoboCup 2015 Standard Platform League Team Description Paper Yongbo Qian, Yizheng He, Qiao (Rachel) Han, Sagar Poudel, Austin Small, Kyu Il Lee and Dr. Daniel Lee General Robotics Automation,
The UPennalizers RoboCup 2015 Standard Platform League Team Description Paper Yongbo Qian, Yizheng He, Qiao (Rachel) Han, Sagar Poudel, Austin Small, Kyu Il Lee and Dr. Daniel Lee General Robotics Automation,
A New Omnidirectional Vision Sensor for Monte-Carlo Localization
 A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
A New Omnidirectional Vision Sensor for Monte-Carlo Localization E. Menegatti 1, A. Pretto 1, and E. Pagello 12 1 Intelligent Autonomous Systems Laboratory Department of Information Engineering The University
An Illumination Identification System for the AIBO Robot
 An Illumination Identification System for the AIBO Robot Michael S. Zehmeister, Yang Sok Kim and Byeong Ho Kang School of Computing, University of Tasmania Sandy Bay, Tasmania 7001, Australia {yangsokk,
An Illumination Identification System for the AIBO Robot Michael S. Zehmeister, Yang Sok Kim and Byeong Ho Kang School of Computing, University of Tasmania Sandy Bay, Tasmania 7001, Australia {yangsokk,
Combining Edge Detection and Colour Segmentation in the Four-Legged League
 Combining Edge Detection and Colour Segmentation in the Four-Legged League Craig L. Murch and Stephan K. Chalup School of Electrical Engineering & Computer Science The University of Newcastle, Callaghan
Combining Edge Detection and Colour Segmentation in the Four-Legged League Craig L. Murch and Stephan K. Chalup School of Electrical Engineering & Computer Science The University of Newcastle, Callaghan
Using infrared proximity sensors for close 2D localization and object size recognition. Richard Berglind Neonode
 Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
isoccerbot System Setup Guide
 We are constantly updating our system documentation. To be kept up dated to our lastest documentation, like our Facebook http://www.facebook.com/inovamicro 1 The Minimum PC requirements for running isoccerbot
We are constantly updating our system documentation. To be kept up dated to our lastest documentation, like our Facebook http://www.facebook.com/inovamicro 1 The Minimum PC requirements for running isoccerbot
DETAILED VISION DOCUMENTATION
 DETAILED VISION DOCUMENTATION Real-time Visual Perception for Autonomous Robotic Soccer Agents RoboCup 99 Thomas Charles Karpati Prof. Rafaello D Andrea Dr. Jin-Woo Lee Revision 2. Revision Date: 5/26/99
DETAILED VISION DOCUMENTATION Real-time Visual Perception for Autonomous Robotic Soccer Agents RoboCup 99 Thomas Charles Karpati Prof. Rafaello D Andrea Dr. Jin-Woo Lee Revision 2. Revision Date: 5/26/99
Fast and Robust Stereo Object Recognition for Spheres
 Fast and Robust Stereo Object Recognition for Spheres Robby McKilliam and Gordon Wyeth Information Technology and Electrical Engineering University of Queensland, Australia wyeth@itee.uq.edu.au Abstract
Fast and Robust Stereo Object Recognition for Spheres Robby McKilliam and Gordon Wyeth Information Technology and Electrical Engineering University of Queensland, Australia wyeth@itee.uq.edu.au Abstract
Tech United Eindhoven Team Description 2009
 Tech United Eindhoven Team Description 2009 W.H.T.M. Aangenent, J.J.T.H. de Best, B.H.M. Bukkems, F.M.W. Kanters, K.J. Meessen, J.J.P.A Willems, R.J.E. Merry, M.J.G. v.d. Molengraft Control Systems Technology
Tech United Eindhoven Team Description 2009 W.H.T.M. Aangenent, J.J.T.H. de Best, B.H.M. Bukkems, F.M.W. Kanters, K.J. Meessen, J.J.P.A Willems, R.J.E. Merry, M.J.G. v.d. Molengraft Control Systems Technology
The Attempto Tübingen Robot Soccer Team
 The Attempto Tübingen Robot Soccer Team Patrick Heinemann, André Treptow, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer Architecture, University of Tübingen, Sand 1, 72076 Tübingen,
The Attempto Tübingen Robot Soccer Team Patrick Heinemann, André Treptow, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer Architecture, University of Tübingen, Sand 1, 72076 Tübingen,
NAO-Team Humboldt 2009
 NAO-Team Humboldt 2009 The RoboCup NAO Team of Humboldt-Universität zu Berlin Alexander Borisov, Alireza Ferdowsizadeh, Christian Mohr, Heinrich Mellmann, Martin Martius, Thomas Krause, Tobias Hermann,
NAO-Team Humboldt 2009 The RoboCup NAO Team of Humboldt-Universität zu Berlin Alexander Borisov, Alireza Ferdowsizadeh, Christian Mohr, Heinrich Mellmann, Martin Martius, Thomas Krause, Tobias Hermann,
Implementation of Path Planning using Genetic Algorithms on Mobile Robots
 Implementation of Path Planning using Genetic Algorithms on Mobile Robots Hagen Burchardt, Ralf Salomon Abstract This paper presents the implementation of a genetic algorithm based path planning on RoboCup's
Implementation of Path Planning using Genetic Algorithms on Mobile Robots Hagen Burchardt, Ralf Salomon Abstract This paper presents the implementation of a genetic algorithm based path planning on RoboCup's
Robust Color Choice for Small-size League RoboCup Competition
 Robust Color Choice for Small-size League RoboCup Competition Qiang Zhou Limin Ma David Chelberg David Parrott School of Electrical Engineering and Computer Science, Ohio University Athens, OH 45701, U.S.A.
Robust Color Choice for Small-size League RoboCup Competition Qiang Zhou Limin Ma David Chelberg David Parrott School of Electrical Engineering and Computer Science, Ohio University Athens, OH 45701, U.S.A.
Visualizing Robot Behaviors as Automated Video Annotations: A Case Study in Robot Soccer
 Visualizing Robot Behaviors as Automated Video Annotations: A Case Study in Robot Soccer Danny Zhu 1 Manuela Veloso 1 Abstract Autonomous mobile robots continuously perceive the world, plan or replan to
Visualizing Robot Behaviors as Automated Video Annotations: A Case Study in Robot Soccer Danny Zhu 1 Manuela Veloso 1 Abstract Autonomous mobile robots continuously perceive the world, plan or replan to
Novel Approaches to Vision and Motion Control for Robot Soccer
 Novel Approaches to Vision and Motion Control for Robot Soccer Manu Chhabra *, Anusheel Nahar, Nishant Agrawal, Tamhant Jain +, Amitabha Mukerjee, Apurva Mathad and Siddhartha Chaudhuri ++ * Department
Novel Approaches to Vision and Motion Control for Robot Soccer Manu Chhabra *, Anusheel Nahar, Nishant Agrawal, Tamhant Jain +, Amitabha Mukerjee, Apurva Mathad and Siddhartha Chaudhuri ++ * Department
Towards a Calibration-Free Robot: The ACT Algorithm for Automatic Online Color Training
 Towards a Calibration-Free Robot: The ACT Algorithm for Automatic Online Color Training Patrick Heinemann, Frank Sehnke, Felix Streichert, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer
Towards a Calibration-Free Robot: The ACT Algorithm for Automatic Online Color Training Patrick Heinemann, Frank Sehnke, Felix Streichert, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer
ROBOCUP 1 is an international robotics competition that
 JOURNAL OF PHYSICAL AGENTS, VOL. 4, NO. 1, JANUARY 2010 11 Recognition of Standard Platform RoboCup Goals José M. Cañas, Eduardo Perdices, Tomás González and Domenec Puig Abstract RoboCup provides a common
JOURNAL OF PHYSICAL AGENTS, VOL. 4, NO. 1, JANUARY 2010 11 Recognition of Standard Platform RoboCup Goals José M. Cañas, Eduardo Perdices, Tomás González and Domenec Puig Abstract RoboCup provides a common
HeadMouse. Robotic Research Team. University of Lleida
 HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
An Efficient Need-Based Vision System in Variable Illumination Environment of Middle Size RoboCup
 An Efficient Need-Based Vision System in Variable Illumination Environment of Middle Size RoboCup Mansour Jamzad and Abolfazal Keighobadi Lamjiri Sharif University of Technology Department of Computer
An Efficient Need-Based Vision System in Variable Illumination Environment of Middle Size RoboCup Mansour Jamzad and Abolfazal Keighobadi Lamjiri Sharif University of Technology Department of Computer
TRACKING OF MULTIPLE SOCCER PLAYERS USING A 3D PARTICLE FILTER BASED ON DETECTOR CONFIDENCE
 Advances in Computer Science and Engineering Volume 6, Number 1, 2011, Pages 93-104 Published Online: February 22, 2011 This paper is available online at http://pphmj.com/journals/acse.htm 2011 Pushpa
Advances in Computer Science and Engineering Volume 6, Number 1, 2011, Pages 93-104 Published Online: February 22, 2011 This paper is available online at http://pphmj.com/journals/acse.htm 2011 Pushpa
Fast Soccer Ball Detection using Deep Learning
 Fast Soccer Ball Detection using Deep Learning Spring 2017 Slides by Aref Moqadam Mehr 1 Problem Statement RoboCup Soccer League NAO HSL Field is no longer Color-Coded Unspecified Patterns (in HSL) NAO
Fast Soccer Ball Detection using Deep Learning Spring 2017 Slides by Aref Moqadam Mehr 1 Problem Statement RoboCup Soccer League NAO HSL Field is no longer Color-Coded Unspecified Patterns (in HSL) NAO
MODEL-BASED MOTION ANALYSIS OF FACTORY WORKERS USING MULTI- PERSPECTIVE VIDEO CAMERAS
 MODEL-BASED MOTION ANALYSIS OF FACTORY WORKERS USING MULTI- PERSPECTIVE VIDEO CAMERAS Kazunori Sakaki, Takako Sato and Hiroshi Arisawa Yokohama National University Abstract: Key words: Motion simulation
MODEL-BASED MOTION ANALYSIS OF FACTORY WORKERS USING MULTI- PERSPECTIVE VIDEO CAMERAS Kazunori Sakaki, Takako Sato and Hiroshi Arisawa Yokohama National University Abstract: Key words: Motion simulation
Omnidirectional Drive Systems Kinematics and Control
 Omnidirectional Drive Systems Kinematics and Control Presented by: Andy Baker President, AndyMark, Inc., FRC 45 Ian Mackenzie Master s Student, Univ. of Waterloo, FRC 1114 2008 FIRST Robotics Conference
Omnidirectional Drive Systems Kinematics and Control Presented by: Andy Baker President, AndyMark, Inc., FRC 45 Ian Mackenzie Master s Student, Univ. of Waterloo, FRC 1114 2008 FIRST Robotics Conference
Running 2D Ball Balancer Experiment
 Running 2D Ball Balancer Experiment Contents Purpose...1 Physical Setup...1 Procedures...3 Step 1: Calibration...3 Step 2: MATLAB and the Environment...4 Step 3: Setup File...5 Step 4: Compile and Run...5
Running 2D Ball Balancer Experiment Contents Purpose...1 Physical Setup...1 Procedures...3 Step 1: Calibration...3 Step 2: MATLAB and the Environment...4 Step 3: Setup File...5 Step 4: Compile and Run...5
Real-Time Object Recognition using a Multi- Framed Temporal Approach
 Bowdoin College Bowdoin Digital Commons Honors Projects Student Scholarship and Creative Work 5-2018 Real-Time Object Recognition using a Multi- Framed Temporal Approach Corinne Alini calini@bowdoin.edu
Bowdoin College Bowdoin Digital Commons Honors Projects Student Scholarship and Creative Work 5-2018 Real-Time Object Recognition using a Multi- Framed Temporal Approach Corinne Alini calini@bowdoin.edu
Calibration of Distributed Vision Network in Unified Coordinate System by Mobile Robots
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Calibration of Distributed Vision Network in Unified Coordinate System by Mobile Robots Tsuyoshi Yokoya,
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Calibration of Distributed Vision Network in Unified Coordinate System by Mobile Robots Tsuyoshi Yokoya,
Dr Robot C# Advance Sentinel 2. Demo Program. Version: June Copyright 2008, Dr Robot Inc. All Rights Reserved.
 25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 Support@DrRobot.com Dr Robot C# Advance Sentinel 2 Demo Program Version: 1.0.0 June 2008-1 - Copyright
25 Valleywood Drive, Unit 20 Markham, Ontario, L3R 5L9, Canada Tel: (905) 943-9572 Fax: (905) 943-9197 Support@DrRobot.com Dr Robot C# Advance Sentinel 2 Demo Program Version: 1.0.0 June 2008-1 - Copyright
The 2012 UT Austin Villa Code Release
 To appear in Proceedings of the RoboCup International Symposium 2013 (RoboCup 2013), Eindhoven, Netherlands, July 2013. The 2012 UT Austin Villa Code Release Samuel Barrett, Katie Genter, Yuchen He, Todd
To appear in Proceedings of the RoboCup International Symposium 2013 (RoboCup 2013), Eindhoven, Netherlands, July 2013. The 2012 UT Austin Villa Code Release Samuel Barrett, Katie Genter, Yuchen He, Todd
Comparing the Usability of RoboFlag Interface Alternatives*
 Comparing the Usability of RoboFlag Interface Alternatives* Sangeeta Shankar, Yi Jin, Li Su, Julie A. Adams, and Robert Bodenheimer Department of Electrical Engineering and Computer Science Vanderbilt
Comparing the Usability of RoboFlag Interface Alternatives* Sangeeta Shankar, Yi Jin, Li Su, Julie A. Adams, and Robert Bodenheimer Department of Electrical Engineering and Computer Science Vanderbilt
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS
 HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
Development of 3D Positioning Scheme by Integration of Multiple Wiimote IR Cameras
 Proceedings of the 5th IIAE International Conference on Industrial Application Engineering 2017 Development of 3D Positioning Scheme by Integration of Multiple Wiimote IR Cameras Hui-Yuan Chan *, Ting-Hao
Proceedings of the 5th IIAE International Conference on Industrial Application Engineering 2017 Development of 3D Positioning Scheme by Integration of Multiple Wiimote IR Cameras Hui-Yuan Chan *, Ting-Hao
Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Color Theory: Color Models Fall 2015 Dr. Michael J. Reale Color Models Different ways to model color: XYZ CIE standard RB Additive Primaries Monitors, video cameras, etc. CMY/CMYK
CS 490: Computer Vision Color Theory: Color Models Fall 2015 Dr. Michael J. Reale Color Models Different ways to model color: XYZ CIE standard RB Additive Primaries Monitors, video cameras, etc. CMY/CMYK
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Improving Percept Reliability in the Sony Four-Legged Robot League
 Improving Percept Reliability in the Sony Four-Legged Robot League Walter Nisticò 1 and Thomas Röfer 2 1 Institute for Robot Research (IRF), Universität Dortmund walter.nistico@udo.edu 2 Center for Computing
Improving Percept Reliability in the Sony Four-Legged Robot League Walter Nisticò 1 and Thomas Röfer 2 1 Institute for Robot Research (IRF), Universität Dortmund walter.nistico@udo.edu 2 Center for Computing
Texture Generation for the Computer Representation of the Upper Gastrointestinal System
 A. Gastélum, P. Delmas, J. Márquez, Texture Generation for the Computer Representation of the Upper Gastrointestinal System, Proceedings of Image and Vision Computing New Zealand 2007, pp. 305 310, Hamilton,
A. Gastélum, P. Delmas, J. Márquez, Texture Generation for the Computer Representation of the Upper Gastrointestinal System, Proceedings of Image and Vision Computing New Zealand 2007, pp. 305 310, Hamilton,
Team Research Report. Nao-Team HTWK. January 2018
 Team Research Report Nao-Team HTWK January 2018 1 Contents 1 Team members and affiliations 3 2 Notable work and fields of interest 3 2.1 Team Strategy........................................ 3 2.1.1 2017
Team Research Report Nao-Team HTWK January 2018 1 Contents 1 Team members and affiliations 3 2 Notable work and fields of interest 3 2.1 Team Strategy........................................ 3 2.1.1 2017
The Color and the Shape: Automatic On-Line Color Calibration for Autonomous Robots
 The Color and the Shape: Automatic On-Line Color Calibration for Autonomous Robots Ketill Gunnarsson, Fabian Wiesel, and Raúl Rojas Freie Universität Berlin, Institut für Informatik, Takustraße 9, 14195
The Color and the Shape: Automatic On-Line Color Calibration for Autonomous Robots Ketill Gunnarsson, Fabian Wiesel, and Raúl Rojas Freie Universität Berlin, Institut für Informatik, Takustraße 9, 14195
ÜberSim: High-Fidelity Multi-Robot Simulation for Robot Soccer
 ÜberSim: High-Fidelity Multi-Robot Simulation for Robot Soccer Content Areas: common sense reasoning, knowledge representation Abstract High fidelity simulation can be a powerful tool for speeding up the
ÜberSim: High-Fidelity Multi-Robot Simulation for Robot Soccer Content Areas: common sense reasoning, knowledge representation Abstract High fidelity simulation can be a powerful tool for speeding up the
HeadMouse. Robotic Research Team. University of Lleida
 HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
HeadMouse Robotic Research Team University of Lleida User Manual and Frequently Asked Questions What is HeadMouse? HeadMouse is a free program designed to replace the computer mouse. The user can control
Honours Project Proposal. Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University
 Honours Project Proposal Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University 2 March 2012 1. Principal Investigator Investigator - Luke Allan Ross Supervisor - Dr.
Honours Project Proposal Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University 2 March 2012 1. Principal Investigator Investigator - Luke Allan Ross Supervisor - Dr.
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot
 Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Using constraint propagation for cooperative UAV localization from vision and ranging
 Using constraint propagation for cooperative UAV localization from vision and ranging Ide-Flore Kenmogne, Vincent Drevelle, and Eric Marchand Univ Rennes, Inria, CNRS, IRISA ide-flore.kenmogne@inria.fr,
Using constraint propagation for cooperative UAV localization from vision and ranging Ide-Flore Kenmogne, Vincent Drevelle, and Eric Marchand Univ Rennes, Inria, CNRS, IRISA ide-flore.kenmogne@inria.fr,
ADVANCING SECURITY INTELLIGENCE
 UVIS Under Vehicle Inspection Systems ADVANCING SECURITY INTELLIGENCE www.irdinc.com Intelligent Optical Threat Detection International Road Dynamics Inc. (IRD) is a global leader in the design, development
UVIS Under Vehicle Inspection Systems ADVANCING SECURITY INTELLIGENCE www.irdinc.com Intelligent Optical Threat Detection International Road Dynamics Inc. (IRD) is a global leader in the design, development
Robot Navigation Worksheet 1: Obstacle Navigation
 Robot Navigation Worksheet 1: Obstacle Navigation Team name: Group members: In this challenge you will learn about the different features of the Move block, test a range of different turns for your robot,
Robot Navigation Worksheet 1: Obstacle Navigation Team name: Group members: In this challenge you will learn about the different features of the Move block, test a range of different turns for your robot,
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
AVseries AV300+ AV350+ Vision Systems AV450+
 AVseries AV300+ AV350+ Vision Systems AV450+ Starrett Vision Systems Rugged, Accurate & easy to use The Starrett automatic vision (or video-based) metrology systems provide accurate 3-axis measurement
AVseries AV300+ AV350+ Vision Systems AV450+ Starrett Vision Systems Rugged, Accurate & easy to use The Starrett automatic vision (or video-based) metrology systems provide accurate 3-axis measurement
Team Research Report. Nao-Team HTWK. December 2015
 Team Research Report Nao-Team HTWK December 2015 1 Contents 1 Team members and affiliations 3 2 Notable work and fields of interest 3 2.1 Vision............................................. 3 2.1.1 Introduction.....................................
Team Research Report Nao-Team HTWK December 2015 1 Contents 1 Team members and affiliations 3 2 Notable work and fields of interest 3 2.1 Vision............................................. 3 2.1.1 Introduction.....................................
CAMBADA 2013: Team Description Paper
 CAMBADA 2013: Team Description Paper R. Dias, A. J. R. Neves, J. L. Azevedo, B. Cunha, J. Cunha, P. Dias, A. Domingos, L. Ferreira, P. Fonseca, N. Lau, E. Pedrosa, A. Pereira, R. Serra, J. Silva, P. Soares
CAMBADA 2013: Team Description Paper R. Dias, A. J. R. Neves, J. L. Azevedo, B. Cunha, J. Cunha, P. Dias, A. Domingos, L. Ferreira, P. Fonseca, N. Lau, E. Pedrosa, A. Pereira, R. Serra, J. Silva, P. Soares
THE RoboCup 1 is a scientific annual competition aimed
 X WORKSHOP DE AGENTES FÍSICOS, SEPTIEMBRE 2009, CÁCERES 1 Visual Goal Detection for the RoboCup Standard Platform League José M. Cañas, Domenec Puig, Eduardo Perdices and Tomás González Abstract This paper
X WORKSHOP DE AGENTES FÍSICOS, SEPTIEMBRE 2009, CÁCERES 1 Visual Goal Detection for the RoboCup Standard Platform League José M. Cañas, Domenec Puig, Eduardo Perdices and Tomás González Abstract This paper
Towards Autonomous Vision Self-Calibration for Soccer Robots
 Towards Autonomous Vision Self-Calibration for Soccer Robots Gerd Mayer Hans Utz Gerhard Kraetzschmar University of Ulm, James-Franck-Ring, 89069 Ulm, Germany Abstract The ability to autonomously adapt
Towards Autonomous Vision Self-Calibration for Soccer Robots Gerd Mayer Hans Utz Gerhard Kraetzschmar University of Ulm, James-Franck-Ring, 89069 Ulm, Germany Abstract The ability to autonomously adapt
AUTOMATIC RECTIFICATION OF IMAGES THROUGH SCALE INDEPENDENT TARGETS
 AUTOMATIC RECTIFICATION OF IMAGES THROUGH SCALE INDEPENDENT TARGETS G. Artese a a Land Planning Dept, University of Calabria, 87036 Rende, Italy - g.artese@unical.it KEY WORDS: Target Recognition, Orthoimage,
AUTOMATIC RECTIFICATION OF IMAGES THROUGH SCALE INDEPENDENT TARGETS G. Artese a a Land Planning Dept, University of Calabria, 87036 Rende, Italy - g.artese@unical.it KEY WORDS: Target Recognition, Orthoimage,
An Omnidirectional Vision System for Soccer Robots
 An Omnidirectional Vision System for Soccer Robots Diplomarbeit von Felix v. Hundelshausen 1 Institut für Informatik, Freie Universität Berlin, Takustr. 9, 14195 Berlin April 11, 2001 Betreuer: Prof. Dr.
An Omnidirectional Vision System for Soccer Robots Diplomarbeit von Felix v. Hundelshausen 1 Institut für Informatik, Freie Universität Berlin, Takustr. 9, 14195 Berlin April 11, 2001 Betreuer: Prof. Dr.
Esercitazione con un robot umanoide programmabile per edutainment
 Corso di Percezione Robotica (PRO) Modulo D: Applicazioni ed Esercitazioni Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com g.teti@robotechsrl.com
Corso di Percezione Robotica (PRO) Modulo D: Applicazioni ed Esercitazioni Esercitazione con un robot umanoide programmabile per edutainment Giancarlo Teti RoboTech srl www.robotechsrl.com g.teti@robotechsrl.com
Chapter 1. Digital Data Representation and Communication. Part 2
 Chapter 1. Digital Data Representation and Communication Part 2 Compression Digital media files are usually very large, and they need to be made smaller compressed Without compression Won t have storage
Chapter 1. Digital Data Representation and Communication Part 2 Compression Digital media files are usually very large, and they need to be made smaller compressed Without compression Won t have storage
Baset Teen-Size 2014 Team Description Paper
 Baset Teen-Size 2014 Team Description Paper Hafez Farazi 1, Mojtaba Hosseini 2, Vahid Mohammadi,Farhad Jafari, Donya Rahmati, Dr. Esfandiar Bamdad 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh
Baset Teen-Size 2014 Team Description Paper Hafez Farazi 1, Mojtaba Hosseini 2, Vahid Mohammadi,Farhad Jafari, Donya Rahmati, Dr. Esfandiar Bamdad 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh
Plymouth Humanoids Team Description Paper for RoboCup 2013
 Plymouth Humanoids Team Description Paper for RoboCup 2013 Arron Griffiths 1, Clare Simpson, Paul Eastham, Alex Smith, Guido Bugmann, Chenguang Yang, Peter Gibbons, and Phil F. Culverhouse Centre for Robotics
Plymouth Humanoids Team Description Paper for RoboCup 2013 Arron Griffiths 1, Clare Simpson, Paul Eastham, Alex Smith, Guido Bugmann, Chenguang Yang, Peter Gibbons, and Phil F. Culverhouse Centre for Robotics
American Football Route Identification Using Supervised Machine Learning
 American Football Route Identification Using Supervised Machine Learning Hochstedler, Jeremy & Paul T. Gagnon Telemetry Sports Abstract Football organizations spend significant resources classifying on-field
American Football Route Identification Using Supervised Machine Learning Hochstedler, Jeremy & Paul T. Gagnon Telemetry Sports Abstract Football organizations spend significant resources classifying on-field
Application of SVMs for Colour Classification and Collision Detection with AIBO Robots
 Application of SVMs for Colour Classification and Collision Detection with AIBO Robots Michael J. Quinlan, Stephan K. Chalup and Richard H. Middleton School of Electrical Engineering & Computer Science
Application of SVMs for Colour Classification and Collision Detection with AIBO Robots Michael J. Quinlan, Stephan K. Chalup and Richard H. Middleton School of Electrical Engineering & Computer Science