Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
|
|
|
- Gregory Hardy
- 5 years ago
- Views:
Transcription

1 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08]
2 In this session Advanced Global Matching Some practical applications of the optimization presented in the last session Correlated Correspondences [ASP*04]: Applies MRF model A Complete Registration System [HAW*08]: Applies Spectral matching to filter correspondences 2
3 Correlated correspondences Correspondence between data and model meshes Model mesh is a template; i.e. data is a subset of model = Template (Model) Data Result Not a registration method; just computes corresponding points between data/model meshes Non-rigid ICP [Hanhel et al. 2003] (using the outputted correspondences) used to actually generate the registration results seen in the paper 3
4 Basic approach A joint probability model represents preferred correspondences Define a probability of each correspondence set between data/model meshes Find the correspondence with the highest probability using Loopy Belief Propagation (LBP) [Yedidia et al. 2003] 2 main components (next parts of the tal) Probability model Optimization
5 Joint Probability Model P({ c}) = 1 Z Compatibility constraints Involves pair of correspondences Represents prior nowledge of which correspondence sets maes sense A. Minimize the amount of deformation induced by the correspondences B. Preserve the geodesic distances in model and data Singleton constraints, l ψ Involves a single correspondence C. Corresponding points have same feature descriptor values l ( c, c l ) ψ ( c ) 5
6 Compatibility 1: Deformation potential Penalize unnatural deformations Edges lengths should stay the same l ij l ij l ij z l l ij x j z x i Corresponding points in data mesh In model mesh 6
7 Compatibility 1: Deformation potential Penalize unnatural deformations Edges should twist little as possible di j Is the direction from to in s coord system x i x j d i j d i j, d j i d j i x i z d i j d j i z l x i di j x j d j i Corresponding points in data mesh In model mesh 7
8 Encoding the preference Zero-mean Gaussian noise model for length and twists Define potential ψ dfor each edge ( z, zl ) in the data mesh ( c, c l ) are correspondence variables indicating what is the corresponding point in the model mesh for z, z respectively l ψ d ( c = i, cl = j) = G( l ij lij ) G( d i j di j ) G( d j i d j i ) Caveat: additional rotation needed to measure twist c = i For each possibility of precompute aligning rotation matrices via rigid ICP on surrounding local patch Expand corresp. variables to be site/rotation pairs
9 Compatibility 2: Geodesic distance potential Penalize large changes in geodesic distance Geodesically nearby points should stay nearby Enforced for each edge in the data mesh x j z dist Geodesic ( z, z l z l ) p x i dist Geodesic ( xi, x j ) If > 3.5p prob assigned 0 otherwise prob assigned 1 Adjacent points in data mesh Corresponding points in model mesh 9
10 Compatibility 2: Geodesic distance potential Penalize large changes in geodesic distance Geodesically far points should stay far away Enforced for each pair of points in the data mesh whose geodesic distance is > 5p x j z z l distgeodesic( z, zl ) > 5 p x i dist Geodesic ( xi, x j ) If < 2p prob assigned 0 otherwise prob assigned 1 Adjacent points in data mesh Corresponding points in model mesh 10
11 Singletons: Local surface signature potential Spin images gives matching score for each individual correspondence Compute spin images & compress using PCA gives surface signature s xi at each point x i Discrepancy between sz (data) and s x (model) i Zero-mean Gaussian noise model sz z x i s x i Compare Spin Images Data mesh Model mesh 11
12 Model summary Get Pairwise Marov Random Field (MRF) Pointwise potential for each pt in data Pairwise potential for each edge in data Far geodesic potentials for each pair of points > 5p apart Data mesh Model mesh
13 Quic intro: Marov Random Fields Joint probability function visualized by a graph Prob. = Product of the potentials at all edges ψ ψ l ( c ) ( c, cl ) (ex) Surface signature potential (ex) Deformation, geodesic distance potential 1 P ({ c}) = ψ l ( c, cl ) ψ ( c ) Z, l Observed nodes Hidden nodes 13
14 Loopy Belief Propagation (LBP) Compute marginal probability for each variable Pic variable value that maximizes the marginal prob. Usual way to compute marginal probabilities (tabulate and sum up) taes exponential time BP is a dynamic programming approach to efficiently compute marginal probabilities Exact for tree MRFs, approximate for general MRFs 14
15 Loopy Belief Propagation (LBP) Basic idea Marginals at node proportional to product of pointwise potential and incoming messages b ( c c a ) = φ ( c ) l N ( ) x i m l ( c ) c b ma mb mc c c c md c d 15
16 Loopy Belief Propagation (LBP) Basic idea Compute these messages (at each edge) and we are done m l ( c ) φ ( c ) ψ ( c, c m l l l l all values of cl q N ( l) \ ) q l ( c l ) x j c l l all values of φ ( c ) ψ ( c, c ) c l l l ml l c 16
17 Loopy Belief Propagation (LBP) Basic idea Compute these messages (at each edge) and we are done m l ( c ) φ ( c ) ψ ( c, c l l l l all values of cl q N ( l) \ ) m q l ( c l ) x j c a ma l c l l all values of φ ( c ) ψ ( c, c ) c l l l l c c b mb l ml mc l c c md l c d 17
18 Loopy Belief Propagation (LBP) Basic idea Compute these messages (at each edge) and we are done m l ( c ) φ ( c ) ψ ( c, c l l l l all values of cl q N ( l) \ ) m q l ( c l ) x j c a ma l c l l all values of φ ( c ) ψ ( c, c ) c l l l l c c b mb l ml mc l Recursive formulation Start at ends and wor your way towards the rest c c md l c d 18
19 Loopy Belief Propagation (LBP) Loops: iterate until messages converge φa ( a ) ψ ab( c Start with initial values (ex: c a, cb ) ) values Apply message update rule until convergence all c a of c a ma b mb a mc a ma c c b mc b mb c Convergence not guaranteed, but wors well in practice c c 19



20 Results & Applications Efficient, coarse-to-fine implementation Xeon 2.4 GHz CPU, 1.5 mins for arm, 10 mins for puppet Correspondences on human body models Finding articulated parts Interpolation between poses

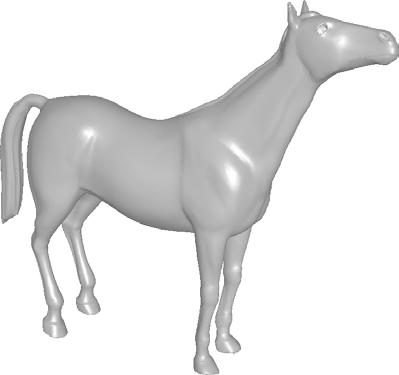
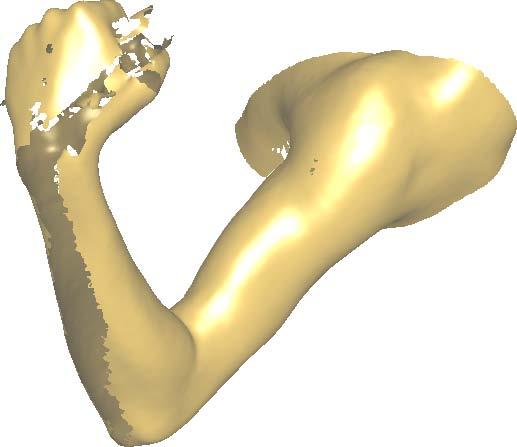
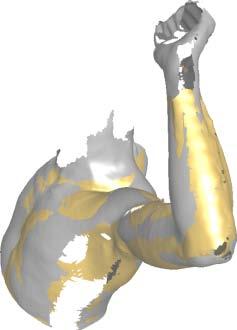
21 Next topic: HAW*08 An application to the spectral matching method of last session A good illustration of how a matching method fits into a real registration pipeline A pairwise method Deform the source shape to match the target shape Gray = source Yellow = target

22 Overview Performs both correspondence and deformation Correspondence Deformation Correspondences based on improving closest points After finding correspondences, deform to move shapes closer together Re-tae correspondences from the deformed position Deform again, and repeat until convergence 22

23 Overview Performs both correspondence and deformation Correspondence Deformation 5 basic steps 1.Closest points 2.Improve by feature matching 3.Filter by spectral matching 4.Expand sparse set 5.Fine-tune target locations 23


24 Overview Performs both correspondence and deformation Correspondence Deformation 2 basic steps 1.Fit per-cluster rigid transformation 2.Sparse least-squares solve for deformed positions Occasional step: Increase cluster size 24
25 Detailed Overview Sampling Whole process wors with reduced sample set Correspondence & Deformation Examine each step in more detail Discussion Discuss pros/cons 25

26 Sample for robustness & efficiency Coarse to fine approach Use uniform subsampling of the surface and its normals Improve efficiency, can improve robustness to local minima Let s mae it more concrete s i Sample set denoted In correspondence: for each s i, find corresponding target points t i In deformation: given t i, find deformed sample positions that match while preserving local shape detail s i t i 26
 Source (gray) arg min t Tˆ s t 2 Usually pretty bad Closest point correspondences")
27 Correspondence Step #1 Find closest points For each source sample, find the closest target sample s = sample point on source t = sample point on target Target (yellow) Source (gray) arg min t Tˆ s t 2 Usually pretty bad Closest point correspondences 27
28 Correspondence Step #2 Improve by feature matching Search target s neighbors to see if there s better feature match, replace target Let f(s) be feature value of s Target (yellow) Source (gray) t arg min f ( s) f ( t ) 2 t N ( t) Iterate until we stop moving If we move too much, discard correspondence Much better, but still outliers Feature-matched correspondences 28
29 Correspondence Step #3 Filter by spectral matching (First some preprocessing) Construct -nn graph on both src & tgt sample set ( = 15) Length of shortest path on graph gives approx. geodesic distances on src & tgt d s, s ) d ( t, t ) g ( i j g i j Goal is to filter these and eep a subset which is geodesically consistent Target (yellow) Source (gray) Feature-matched correspondences 29
 d ( s, s ) = ii g i j g i j Target (yellow) Source (gray) Threshold c 0 = 0.7 gives how much error in consistency we are willing to accept Feature-matched correspondences 30")
30 Correspondence Step #3 Filter by spectral matching Construct affinity matrix M using these shortest path distances Consistency term & matrix c ij d g ( si, s j ) d g ( ti, t j ) min{, }, c = 1 d ( t, t ) d ( s, s ) = ii g i j g i j Target (yellow) Source (gray) Threshold c 0 = 0.7 gives how much error in consistency we are willing to accept Feature-matched correspondences 30
 Source (gray) Filtered matches usually sparse Filtered")
31 Correspondence Step #3 Filter by spectral matching Apply spectral matching: find eigenvector with largest eigenvalue score for each correspondence Iteratively add corresp. with largest score while consistency with the rest is above c_0 Gives ernel correspondences Target (yellow) Source (gray) Filtered matches usually sparse Filtered correspondences 31
32 Correspondence Step #4 Expand sparse set Lots of samples have no target position For these, find best target position that respects geodesic distances to ernel set Target (yellow) Source (gray) t = arg min e ( s, t) i K i t N ( t, T) e (,) st = d (, ss) d (, tt ) K g g ( s, t ) K g j 2 Expanded correspondences 32
33 Correspondence Step #4 Expand sparse set Lots of samples have no target position Compute confidence weight based only how well it respects geodesic distances to ernel set Target (yellow) Source (gray) w i ek( si, ti) = exp( ) 2e e = 1 K ( s, t ) K e ( s, t ) K Red = not consistent --- Blue = very consistent Expanded correspondences 33
 Source (gray) Expanded correspondences")
34 Correspondence Step #5 Fine-tuning So far, target points restricted to be points in target samples Not accurate when shapes are close together Relax this restriction and let target points become any point in the original point cloud Replace target sample with a closer neighbor in the original point cloud Target (yellow) Source (gray) Expanded correspondences 34
35 Deformation Solved by energy minimization (least squares) Last step gave target positions Now find deformed sample positions target positions Two basic criteria: t i that match Match correspondences: should be close to Shape should preserve detail (as-rigid-as-possible) Combine to give energy term: s i t i E = λ E + λ E s i corr corr rigid rigid t i 35
 metrics Weighted by confidence weight w i of the target position E w α β ' 2 ' T 2 corr = i si ti + (( si ti) ni) s S i")
36 Correspondence matching term Combination of point-to-point (α=0.6) and point-toplane (β=0.4) metrics Weighted by confidence weight w i of the target position E w α β ' 2 ' T 2 corr = i si ti + (( si ti) ni) s S i Point-to-point Point-to-plane 36
37 Shape preservation term Deformed positions should preserve shape detail Form an extended cluster C ~ for each sample point: the sample itself and its neighbors For each C ~ find the rigid transformation (R,T) from sample positions to their deformed locations E = Rs+ T s ' i i s C i s When solving for, constrain them to move rigidly i according to each cluster that it s associated with 2 37

,")

38 Clusters for local rigidity Initially each cluster contains a single sample point Every 10 iterations (of correspondence & deformation), combine clusters that have similar rigid transformations (forming larger rigid parts) 38


39 Advantages of features & clustering Source + Target Without Features Without Clustering With Both 39

40 Results 40


41 Results 41



42 Results Efficient, robust method 42
43 Conclusion Correlated correspondence Robust method for matching correspondences Measure how much the correspondence maes sense Probability model optimized using LBP Requires a template If model is incomplete, then there is no correct corresponding point to assign
44 Conclusion Non-rigid registration under isometric deformations Improve closest point correspondences using features and spectral matching Deform shape while preserving local rigidity of clusters Iteratively estimate correspondences and deformation until convergence Robust, efficient method Relies on geodesic distances (problematic when holes are too large) 44
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Articulated Model Detection in Range Images
 Articulated Model Detection in Range Images Jim Rodgers Stanford University jimkr@cs.stanford.edu June 14, 2006 Abstract We present a method for detecting the placement of complex articulated models in
Articulated Model Detection in Range Images Jim Rodgers Stanford University jimkr@cs.stanford.edu June 14, 2006 Abstract We present a method for detecting the placement of complex articulated models in
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
10708 Graphical Models: Homework 4
 10708 Graphical Models: Homework 4 Due November 12th, beginning of class October 29, 2008 Instructions: There are six questions on this assignment. Each question has the name of one of the TAs beside it,
10708 Graphical Models: Homework 4 Due November 12th, beginning of class October 29, 2008 Instructions: There are six questions on this assignment. Each question has the name of one of the TAs beside it,
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008
 CS 664 Spring 2008") Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Registration of Deformable Objects
 Registration of Deformable Objects Christopher DeCoro Includes content from: Consistent Mesh Parameterizations, Praun et. al, Siggraph 2001 The Space of Human Body Shapes, Allen et. al, Siggraph 2003 Shape-based
Registration of Deformable Objects Christopher DeCoro Includes content from: Consistent Mesh Parameterizations, Praun et. al, Siggraph 2001 The Space of Human Body Shapes, Allen et. al, Siggraph 2003 Shape-based
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Data Preprocessing. Javier Béjar. URL - Spring 2018 CS - MAI 1/78 BY: $\
 Data Preprocessing Javier Béjar BY: $\ URL - Spring 2018 C CS - MAI 1/78 Introduction Data representation Unstructured datasets: Examples described by a flat set of attributes: attribute-value matrix Structured
Data Preprocessing Javier Béjar BY: $\ URL - Spring 2018 C CS - MAI 1/78 Introduction Data representation Unstructured datasets: Examples described by a flat set of attributes: attribute-value matrix Structured
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Algorithms for 3D Isometric Shape Correspondence
 Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Collective classification in network data
 1 / 50 Collective classification in network data Seminar on graphs, UCSB 2009 Outline 2 / 50 1 Problem 2 Methods Local methods Global methods 3 Experiments Outline 3 / 50 1 Problem 2 Methods Local methods
1 / 50 Collective classification in network data Seminar on graphs, UCSB 2009 Outline 2 / 50 1 Problem 2 Methods Local methods Global methods 3 Experiments Outline 3 / 50 1 Problem 2 Methods Local methods
D-Separation. b) the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.
 the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.") D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Lecture 28 Intro to Tracking
 Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28
 Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Data Preprocessing. Javier Béjar AMLT /2017 CS - MAI. (CS - MAI) Data Preprocessing AMLT / / 71 BY: $\
 Data Preprocessing AMLT / / 71 BY: $\") Data Preprocessing S - MAI AMLT - 2016/2017 (S - MAI) Data Preprocessing AMLT - 2016/2017 1 / 71 Outline 1 Introduction Data Representation 2 Data Preprocessing Outliers Missing Values Normalization Discretization
Data Preprocessing S - MAI AMLT - 2016/2017 (S - MAI) Data Preprocessing AMLT - 2016/2017 1 / 71 Outline 1 Introduction Data Representation 2 Data Preprocessing Outliers Missing Values Normalization Discretization
TELCOM2125: Network Science and Analysis
 School of Information Sciences University of Pittsburgh TELCOM2125: Network Science and Analysis Konstantinos Pelechrinis Spring 2015 2 Part 4: Dividing Networks into Clusters The problem l Graph partitioning
School of Information Sciences University of Pittsburgh TELCOM2125: Network Science and Analysis Konstantinos Pelechrinis Spring 2015 2 Part 4: Dividing Networks into Clusters The problem l Graph partitioning
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Chapter 7: Competitive learning, clustering, and self-organizing maps
 Chapter 7: Competitive learning, clustering, and self-organizing maps António R. C. Paiva EEL 6814 Spring 2008 Outline Competitive learning Clustering Self-Organizing Maps What is competition in neural
Chapter 7: Competitive learning, clustering, and self-organizing maps António R. C. Paiva EEL 6814 Spring 2008 Outline Competitive learning Clustering Self-Organizing Maps What is competition in neural
Unsupervised Learning
 Unsupervised Learning Learning without Class Labels (or correct outputs) Density Estimation Learn P(X) given training data for X Clustering Partition data into clusters Dimensionality Reduction Discover
Unsupervised Learning Learning without Class Labels (or correct outputs) Density Estimation Learn P(X) given training data for X Clustering Partition data into clusters Dimensionality Reduction Discover
Network Traffic Measurements and Analysis
 DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
Computer Vision Group Prof. Daniel Cremers. 4a. Inference in Graphical Models
 Group Prof. Daniel Cremers 4a. Inference in Graphical Models Inference on a Chain (Rep.) The first values of µ α and µ β are: The partition function can be computed at any node: Overall, we have O(NK 2
Group Prof. Daniel Cremers 4a. Inference in Graphical Models Inference on a Chain (Rep.) The first values of µ α and µ β are: The partition function can be computed at any node: Overall, we have O(NK 2
Outline. Data Association Scenarios. Data Association Scenarios. Data Association Scenarios
 Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Geometric Modeling Summer Semester 2012 Point-Based Modeling
 Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Computer Vision Group Prof. Daniel Cremers. 4. Probabilistic Graphical Models Directed Models
 Prof. Daniel Cremers 4. Probabilistic Graphical Models Directed Models The Bayes Filter (Rep.) (Bayes) (Markov) (Tot. prob.) (Markov) (Markov) 2 Graphical Representation (Rep.) We can describe the overall
Prof. Daniel Cremers 4. Probabilistic Graphical Models Directed Models The Bayes Filter (Rep.) (Bayes) (Markov) (Tot. prob.) (Markov) (Markov) 2 Graphical Representation (Rep.) We can describe the overall
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Phase demodulation of interferograms with open or closed fringes
 Phase demodulation of interferograms with open or closed fringes Mariano Rivera Centro de Investigacion en Matematicas A.C., Apdo. Postal 402, Guanajuato, Gto. Mexico 36000 Abstract Analysis of fringe
Phase demodulation of interferograms with open or closed fringes Mariano Rivera Centro de Investigacion en Matematicas A.C., Apdo. Postal 402, Guanajuato, Gto. Mexico 36000 Abstract Analysis of fringe
CS 664 Slides #11 Image Segmentation. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Non-linear dimension reduction
 Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Learning Two-View Stereo Matching
 Learning Two-View Stereo Matching Jianxiong Xiao Jingni Chen Dit-Yan Yeung Long Quan Department of Computer Science and Engineering The Hong Kong University of Science and Technology The 10th European
Learning Two-View Stereo Matching Jianxiong Xiao Jingni Chen Dit-Yan Yeung Long Quan Department of Computer Science and Engineering The Hong Kong University of Science and Technology The 10th European
Introduction to Graphical Models
 Robert Collins CSE586 Introduction to Graphical Models Readings in Prince textbook: Chapters 10 and 11 but mainly only on directed graphs at this time Credits: Several slides are from: Review: Probability
Robert Collins CSE586 Introduction to Graphical Models Readings in Prince textbook: Chapters 10 and 11 but mainly only on directed graphs at this time Credits: Several slides are from: Review: Probability
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Mean Field and Variational Methods finishing off
 Readings: K&F: 10.1, 10.5 Mean Field and Variational Methods finishing off Graphical Models 10708 Carlos Guestrin Carnegie Mellon University November 5 th, 2008 10-708 Carlos Guestrin 2006-2008 1 10-708
Readings: K&F: 10.1, 10.5 Mean Field and Variational Methods finishing off Graphical Models 10708 Carlos Guestrin Carnegie Mellon University November 5 th, 2008 10-708 Carlos Guestrin 2006-2008 1 10-708
Problem Set 4. Assigned: March 23, 2006 Due: April 17, (6.882) Belief Propagation for Segmentation
 Belief Propagation for Segmentation") 6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
6.098/6.882 Computational Photography 1 Problem Set 4 Assigned: March 23, 2006 Due: April 17, 2006 Problem 1 (6.882) Belief Propagation for Segmentation In this problem you will set-up a Markov Random
Integrating Probabilistic Reasoning with Constraint Satisfaction
 Integrating Probabilistic Reasoning with Constraint Satisfaction IJCAI Tutorial #7 Instructor: Eric I. Hsu July 17, 2011 http://www.cs.toronto.edu/~eihsu/tutorial7 Getting Started Discursive Remarks. Organizational
Integrating Probabilistic Reasoning with Constraint Satisfaction IJCAI Tutorial #7 Instructor: Eric I. Hsu July 17, 2011 http://www.cs.toronto.edu/~eihsu/tutorial7 Getting Started Discursive Remarks. Organizational
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Community Detection. Community
 Community Detection Community In social sciences: Community is formed by individuals such that those within a group interact with each other more frequently than with those outside the group a.k.a. group,
Community Detection Community In social sciences: Community is formed by individuals such that those within a group interact with each other more frequently than with those outside the group a.k.a. group,
Nonlinear projections. Motivation. High-dimensional. data are. Perceptron) ) or RBFN. Multi-Layer. Example: : MLP (Multi(
 ) or RBFN. Multi-Layer. Example: : MLP (Multi(") Nonlinear projections Université catholique de Louvain (Belgium) Machine Learning Group http://www.dice.ucl ucl.ac.be/.ac.be/mlg/ 1 Motivation High-dimensional data are difficult to represent difficult
Nonlinear projections Université catholique de Louvain (Belgium) Machine Learning Group http://www.dice.ucl ucl.ac.be/.ac.be/mlg/ 1 Motivation High-dimensional data are difficult to represent difficult
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Clustering. Informal goal. General types of clustering. Applications: Clustering in information search and analysis. Example applications in search
 Informal goal Clustering Given set of objects and measure of similarity between them, group similar objects together What mean by similar? What is good grouping? Computation time / quality tradeoff 1 2
Informal goal Clustering Given set of objects and measure of similarity between them, group similar objects together What mean by similar? What is good grouping? Computation time / quality tradeoff 1 2
Note Set 4: Finite Mixture Models and the EM Algorithm
 Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Geometric modeling 1
 Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018
 CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
Topology-Invariant Similarity and Diffusion Geometry
 1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Mesh segmentation. Florent Lafarge Inria Sophia Antipolis - Mediterranee
 Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Shape Matching. Michael Kazhdan ( /657)
") Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Expectation Propagation
 Expectation Propagation Erik Sudderth 6.975 Week 11 Presentation November 20, 2002 Introduction Goal: Efficiently approximate intractable distributions Features of Expectation Propagation (EP): Deterministic,
Expectation Propagation Erik Sudderth 6.975 Week 11 Presentation November 20, 2002 Introduction Goal: Efficiently approximate intractable distributions Features of Expectation Propagation (EP): Deterministic,
An Approximate Singular Value Decomposition of Large Matrices in Julia
 An Approximate Singular Value Decomposition of Large Matrices in Julia Alexander J. Turner 1, 1 Harvard University, School of Engineering and Applied Sciences, Cambridge, MA, USA. In this project, I implement
An Approximate Singular Value Decomposition of Large Matrices in Julia Alexander J. Turner 1, 1 Harvard University, School of Engineering and Applied Sciences, Cambridge, MA, USA. In this project, I implement
Large Mesh Deformation Using the Volumetric Graph Laplacian
 Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
Message-passing algorithms (continued)
") Message-passing algorithms (continued) Nikos Komodakis Ecole des Ponts ParisTech, LIGM Traitement de l information et vision artificielle Graphs with loops We saw that Belief Propagation can exactly optimize
Message-passing algorithms (continued) Nikos Komodakis Ecole des Ponts ParisTech, LIGM Traitement de l information et vision artificielle Graphs with loops We saw that Belief Propagation can exactly optimize
Statistical Physics of Community Detection
 Statistical Physics of Community Detection Keegan Go (keegango), Kenji Hata (khata) December 8, 2015 1 Introduction Community detection is a key problem in network science. Identifying communities, defined
Statistical Physics of Community Detection Keegan Go (keegango), Kenji Hata (khata) December 8, 2015 1 Introduction Community detection is a key problem in network science. Identifying communities, defined
Stable and Multiscale Topological Signatures
 Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Non-Experts Shape Modeling for Dummies
 Non-Experts Shape Modeling for Dummies (Modeling with Interchangeable Parts) Alla Sheffer (joint work with Vladislav Kraevoy & Dan Julius) Motivation - Easy creation of 3D Content Currently 3D modeling
Non-Experts Shape Modeling for Dummies (Modeling with Interchangeable Parts) Alla Sheffer (joint work with Vladislav Kraevoy & Dan Julius) Motivation - Easy creation of 3D Content Currently 3D modeling
Image Analysis & Retrieval. CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W Lec 18.
 Fall 2016, M/W Lec 18.") Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 18 Image Hashing Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph:
Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 18 Image Hashing Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph:
Visual Representations for Machine Learning
 Visual Representations for Machine Learning Spectral Clustering and Channel Representations Lecture 1 Spectral Clustering: introduction and confusion Michael Felsberg Klas Nordberg The Spectral Clustering
Visual Representations for Machine Learning Spectral Clustering and Channel Representations Lecture 1 Spectral Clustering: introduction and confusion Michael Felsberg Klas Nordberg The Spectral Clustering
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes
 Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Sensor Tasking and Control
 Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Segmentation: Clustering, Graph Cut and EM
 Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Learning a Manifold as an Atlas Supplementary Material
 Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Learning a Manifold as an Atlas Supplementary Material Nikolaos Pitelis Chris Russell School of EECS, Queen Mary, University of London [nikolaos.pitelis,chrisr,lourdes]@eecs.qmul.ac.uk Lourdes Agapito
Combinatorial optimization and its applications in image Processing. Filip Malmberg
 Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
( ) =cov X Y = W PRINCIPAL COMPONENT ANALYSIS. Eigenvectors of the covariance matrix are the principal components
 =cov X Y = W PRINCIPAL COMPONENT ANALYSIS. Eigenvectors of the covariance matrix are the principal components") Review Lecture 14 ! PRINCIPAL COMPONENT ANALYSIS Eigenvectors of the covariance matrix are the principal components 1. =cov X Top K principal components are the eigenvectors with K largest eigenvalues
Review Lecture 14 ! PRINCIPAL COMPONENT ANALYSIS Eigenvectors of the covariance matrix are the principal components 1. =cov X Top K principal components are the eigenvectors with K largest eigenvalues
Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Robust Kernel Methods in Clustering and Dimensionality Reduction Problems
 Robust Kernel Methods in Clustering and Dimensionality Reduction Problems Jian Guo, Debadyuti Roy, Jing Wang University of Michigan, Department of Statistics Introduction In this report we propose robust
Robust Kernel Methods in Clustering and Dimensionality Reduction Problems Jian Guo, Debadyuti Roy, Jing Wang University of Michigan, Department of Statistics Introduction In this report we propose robust