Artificial Intelligence, CS, Nanjing University Spring, 2016, Yang Yu. Lecture 5: Search 4.
|
|
|
- Randolf Wilkinson
- 5 years ago
- Views:
Transcription

1 Artificial Intelligence, CS, Nanjing University Spring, 2016, Yang Yu Lecture 5: Search 4
2 Previously... Path-based search Uninformed search Depth-first, breadth first, uniform-cost search Informed search Best-first, A* search Adversarial search Alpha-Beta search
3 Beyond classical search Bandit search Tree search: Monte-Carlo Tree Search General search: Gradient decent Metaheuristic search
4 Bandit Multiple arms Each arm has an expected reward, but unknown, with an unknown distribution Maximize your award in fixed trials
5 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem?
6 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem? waste on suboptimal arms
7 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem? waste on suboptimal arms Exploitation-only:
8 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem? waste on suboptimal arms Exploitation-only: 1. try each arm once 2. try the observed best arm T-K times
9 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem? waste on suboptimal arms Exploitation-only: 1. try each arm once 2. try the observed best arm T-K times problem?
10 Simplest strategies Two simplest strategies Exploration-only: for T trails and K arms, try each arm T/K times problem? waste on suboptimal arms Exploitation-only: 1. try each arm once 2. try the observed best arm T-K times problem? risk of wrong best arm
11 ε-greedy Balance the exploration and exploitation: with ε probability, try a random arm with 1-ε probability, try the best arm ε controls the balance
12 Softmax Balance the exploration and exploitation: Choose arm with probability τ controls the balance
13 Upper-confidence bound Balance the exploration and exploitation: Choose arm with the largest value of average reward + upper confidence bound 2.5% Q(k) UCB
14 Monte-Carlo Tree Search Gradually grow the search tree: I Iterate Tree-Walk I Building Blocks I I I I I I Returned solution: I Select next action Bandit phase Add a node Grow a leaf of the search tree Select next action bis Random phase, roll-out Compute instant reward Evaluate Update information in visited nodes Propagate Path visited most often Kocsis Szepesvári, 06 Bandit Based Phase Search Tree Random Phase Explored Tree New Node

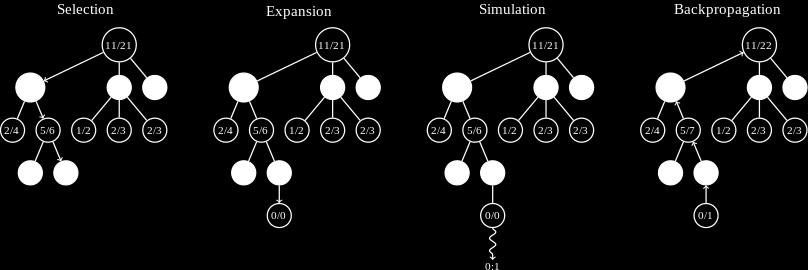
15 Monte-Carlo Tree Search Example: Pic from How to select the leave? As bandit rollout

16 Monte-Carlo Tree Search codes from

17 Monte-Carlo Tree Search codes from
18 Monte-Carlo Tree Search optimal? Yes, after infinite tries compare with alpha-beta pruning no need of heuristic function
 3. The outcome of the tree-walk is r Improvements?")
19 Monte-Carlo Tree Search Improving random rollout Monte-Carlo-based Brügman Until the goban is filled, add a stone (black or white in turn) at a uniformly selected empty position 2. Compute r =Win(black) 3. The outcome of the tree-walk is r Improvements? I Put stones randomly in the neighborhood of a previous stone I Put stones matching patterns prior knowledge I Put stones optimizing a value function Silver et al. 07
20 General search
21 Greedy idea in continuous space Suppose we want to site three airports in Romania: 6-D state space defined by (x 1, y 2 ), (x 2, y 2 ), (x 3, y 3 ) objective function f(x 1, y 2, x 2, y 2, x 3, y 3 ) = sum of squared distances from each city to nearest airport 71 Oradea Neamt Zerind 75 Arad Timisoara Dobreta 151 Sibiu 99 Fagaras 80 Rimnicu Vilcea Lugoj Mehadia 120 Pitesti Bucharest Craiova 90 Giurgiu 87 Iasi Urziceni Vaslui Hirsova 86 Eforie
22 Greedy idea in continuous space discretize and use hill climbing 71 Oradea Neamt Zerind 75 Arad Timisoara Dobreta 151 Sibiu 99 Fagaras 80 Rimnicu Vilcea Lugoj Mehadia 120 Pitesti Bucharest Craiova 90 Giurgiu 87 Iasi Urziceni Vaslui Hirsova 86 Eforie
23 Greedy idea in continuous space gradient decent 6-D state space defined by (x 1, y 2 ), (x 2, y 2 ), (x 3, y 3 ) objective function f(x 1, y 2, x 2, y 2, x 3, y 3 ) = sum of squared distances from each city to nearest airport Gradient methods compute f = ± f, f, f, f, f, f x 1 y 1 x 2 y 2 x 3 y 3 to increase/reduce f, e.g., by x x + α f(x) 1-order method
24 Greedy idea in continuous space gradient decent 6-D state space defined by (x 1, y 2 ), (x 2, y 2 ), (x 3, y 3 ) objective function f(x 1, y 2, x 2, y 2, x 3, y 3 ) = sum of squared distances from each city to nearest airport Sometimes can solve for f(x) = 0 exactly (e.g., with one city). Newton Raphson (1664, 1690) iterates x x H 1 f (x) f(x) to solve f(x) = 0, where H ij = 2 f/ x i x j 2-order method Taylor s series: f(x) =f(a)+(x a)f (a)+ (x a)2 2 f (a)+ = i=0 (x a) i f (i) (a). i!
25 Greedy idea 1st and 2nd order methods may not find global optimal solutions they work for convex functions objective function global maximum shoulder local maximum "flat" local maximum current state state space
26 Meta-heuristics problem independent black-box zeroth-order method... and usually inspired from nature phenomenon

27 Simulated annealing temperature from high to low when high temperature, form the shape when low temperature, polish the detail
28 Simulated annealing Idea: escape local maxima by allowing some bad moves but gradually decrease their size and frequency function Simulated-Annealing( problem, schedule) returns a solution state inputs: problem, a problem schedule, a mapping from time to temperature local variables: current, a node next, a node T, a temperature controlling prob. of downward steps current Make-Node(Initial-State[problem]) for t 1 to do T schedule[t] if T = 0 then return current next a randomly selected successor of current E Value[next] Value[current] if E > 0 then current next else current next only with probability e E/T the neighborhood range shrinks with T the probability of accepting a bad solution decreases with T
29 Simulated annealing a demo graphic from
30 Local beam search Idea: keep k states instead of 1; choose top k of all their successors Not the same as k searches run in parallel! Searches that find good states recruit other searches to join them Problem: quite often, all k states end up on same local hill Idea: choose k successors randomly, biased towards good ones Observe the close analogy to natural selection!
31 Genetic algorithm a simulation of Darwin s evolutionary theory over-reproduction with diversity nature selection random initialization parent population reproduction offspring solutions selection evaluated offspring solutions evaluation
32 Genetic algorithm Encode a solution as a vector, 1: Pop n randomly drawn solutions from X 2: for t=1,2,... do 3: Pop m {mutate(s) 8s 2 Pop}, the mutated solutions 4: Pop c {crossover(s 1,s 2 ) 9s 1,s 2 2 Pop m }, the recombined solutions 5: evaluate every solution in Pop c by f(s)(8s 2 Pop c ) 6: Pop s selected solutions from Pop and Pop c 7: Pop Pop s 8: terminate if meets a stopping criterion 9: end for
33 Genetic algorithm % % % % Fitness Selection Pairs Cross Over Mutation GAs require states encoded as strings (GPs use programs) Crossover helps iff substrings are meaningful components + =
34 Example Encode a solution as a vector with length n each element of the vector can be chosen from {1,...,V } parameters: mutation probability pm, crossover probability pc 1: 2: 3: 4: 5: 6: 7: 8: 9: 10: 11: 12: 13: 14: 15: 16: 17: Pop = randomly generate n solutions from {1,...,V } n for t=1,2,... do Pop m =emptyset, Pop c =emptyset for i = 1 to n let x be the i-th solution in Pop for j = 1 to n: with probability p m, change x j by a random value from {1,...,V } add x into Pop m end for for i = 1 to n let x be the i-th solution in Pop m let x be a randomly selected solution from Pop m with probability p c, exchange a random part of x with x add x into Pop c end for evaluate solutions in Pop c, select the best n solutions from Pop and Pop c to Pop terminal if a good solution is found end for
35 An evolutionary of virtual life

36 An evolutionary of virtual life
37 Properties of meta-heuristics zeroth order do not need differentiable functions convergence will find an optimal solution if or P( x -> x1 ->... -> xk -> x* )>0 P( x* x )>0 a missing link observation simulation
38 Properties of meta-heuristics zeroth order do not need differentiable functions convergence will find an optimal solution if or P( x -> x1 ->... -> xk -> x* )>0 P( x* x )>0 a missing link observation simulation observation principle application
39 Properties of meta-heuristics grey wolf optimizer 2010 gravitational search algorithm river formation dynamics 2000 differential evolution 1990 memetic algorithms cultural algorithms 1980 fireworks algorithm brainstorm algorithm bat algorithm intelligent water drops algorithm artificial bee colony algorithms particle swarm optimization algorithms ant colony optimization algorithms artificial immune systems tabu search simulated annealing 1970 evolutionary strategies evolutionary programming 1960 genetic algorithms
40 Example hard to apply traditional optimization methods but easy to test a given solution Representation: parameterize Fitness: represented as a vector of parameters x i f(x i ) test by simulation/experiment


")

41 Example this nose... has been newly developed... using the latest analytical technique (i.e. genetic algorithms) N700 cars save 19% energy... 30% increase in the output... This is a result of adopting the... nose shape
42 Example NASA ST5 hard to apply traditional optimization methods but easy to test a given solution
43 Example NASA ST5 hard to apply traditional optimization methods but easy to test a given solution


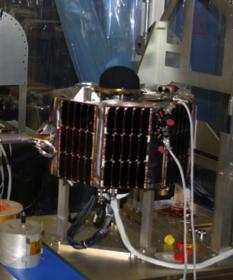


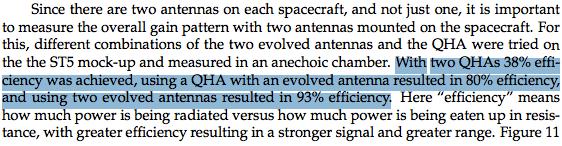

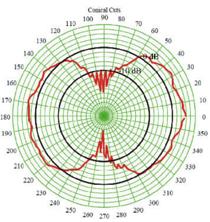
44 Example NASA ST5 hard to apply traditional optimization methods but easy to test a given solution تج) QHAs % $ ) 38% efficiency evolved antennas resulted in 93% efficiency
45 Different Environment Properties
46 Nondeterministic actions ose that we introduce nondeterminism in the form of a powerful In the erratic vacuum world, thesuck action works as follows: When applied to a dirty square the action cleans the square and sometimes cleans up dirt in an adjacent square, too. When applied to a clean square the action sometimes deposits dirt on the carpet almost all real-world problems are nondeterministic how do you solve this problem?
47 AND-OR tree search OR node: different actions (as usual) AND node: different transitions 1 Suck Right GOAL Suck Right Left Suck 5 LOOP 1 LOOP 6 Suck Left 1 LOOP 8 4 GOAL 8 GOAL 5 LOOP a solution is not a path but a tree
48 Depth-first AND-OR tree search function AND-OR-GRAPH-SEARCH(problem) returns a conditional plan, or failure OR-SEARCH(problem.INITIAL-STATE, problem, []) function OR-SEARCH(state, problem, path) returns a conditional plan, or failure if problem.goal-test(state) then return the empty plan if state is on path then return failure for each action in problem.actions(state) do plan AND-SEARCH(RESULTS(state, action), problem, [state path]) if plan failure then return [action plan] return failure function AND-SEARCH(states, problem, path) returns a conditional plan, or failure for each s i in states do plan i OR-SEARCH(s i, problem, path) if plan i = failure then return failure return [if s 1 then plan 1 else if s 2 then plan 2 else...if s n 1 then plan n 1 else plan n ]
49 Search with no observations search in belief (in agent s mind) L R L R S S S L R 5 S 5 3 L 6 4 S 4 R 7 L 7 R 8 8 L R 6 8 S 8 7 L R S 3 7
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu. Lecture 5: Search 4.
 Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu Lecture 5: Search 4 http://cs.nju.edu.cn/yuy/course_ai18.ashx Previously... Path-based search Uninformed search Depth-first, breadth
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu Lecture 5: Search 4 http://cs.nju.edu.cn/yuy/course_ai18.ashx Previously... Path-based search Uninformed search Depth-first, breadth
TDT4136 Logic and Reasoning Systems
 TDT4136 Logic and Reasoning Systems Chapter 3 & 4.1 - Informed Search and Exploration Lester Solbakken solbakke@idi.ntnu.no Norwegian University of Science and Technology 18.10.2011 1 Lester Solbakken
TDT4136 Logic and Reasoning Systems Chapter 3 & 4.1 - Informed Search and Exploration Lester Solbakken solbakke@idi.ntnu.no Norwegian University of Science and Technology 18.10.2011 1 Lester Solbakken
Lecture Plan. Best-first search Greedy search A* search Designing heuristics. Hill-climbing. 1 Informed search strategies. Informed strategies
 Lecture Plan 1 Informed search strategies (KA AGH) 1 czerwca 2010 1 / 28 Blind vs. informed search strategies Blind search methods You already know them: BFS, DFS, UCS et al. They don t analyse the nodes
Lecture Plan 1 Informed search strategies (KA AGH) 1 czerwca 2010 1 / 28 Blind vs. informed search strategies Blind search methods You already know them: BFS, DFS, UCS et al. They don t analyse the nodes
Artificial Intelligence: Search Part 2: Heuristic search
 Artificial Intelligence: Search Part 2: Heuristic search Thomas Trappenberg January 16, 2009 Based on the slides provided by Russell and Norvig, Chapter 4, Section 1 2,(4) Outline Best-first search A search
Artificial Intelligence: Search Part 2: Heuristic search Thomas Trappenberg January 16, 2009 Based on the slides provided by Russell and Norvig, Chapter 4, Section 1 2,(4) Outline Best-first search A search
Informed Search Algorithms. Chapter 4
 Informed Search Algorithms Chapter 4 Outline Informed Search and Heuristic Functions For informed search, we use problem-specific knowledge to guide the search. Topics: Best-first search A search Heuristics
Informed Search Algorithms Chapter 4 Outline Informed Search and Heuristic Functions For informed search, we use problem-specific knowledge to guide the search. Topics: Best-first search A search Heuristics
Informed Search and Exploration
 Ch. 04 p.1/39 Informed Search and Exploration Chapter 4 Ch. 04 p.2/39 Outline Best-first search A search Heuristics IDA search Hill-climbing Simulated annealing Ch. 04 p.3/39 Review: Tree search function
Ch. 04 p.1/39 Informed Search and Exploration Chapter 4 Ch. 04 p.2/39 Outline Best-first search A search Heuristics IDA search Hill-climbing Simulated annealing Ch. 04 p.3/39 Review: Tree search function
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
Informed search algorithms
 CS 580 1 Informed search algorithms Chapter 4, Sections 1 2, 4 CS 580 2 Outline Best-first search A search Heuristics Hill-climbing Simulated annealing CS 580 3 Review: General search function General-Search(
CS 580 1 Informed search algorithms Chapter 4, Sections 1 2, 4 CS 580 2 Outline Best-first search A search Heuristics Hill-climbing Simulated annealing CS 580 3 Review: General search function General-Search(
Artificial Intelligence
 Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
Informed Search. Topics. Review: Tree Search. What is Informed Search? Best-First Search
 Topics Informed Search Best-First Search Greedy Search A* Search Sattiraju Prabhakar CS771: Classes,, Wichita State University 3/6/2005 AI_InformedSearch 2 Review: Tree Search What is Informed Search?
Topics Informed Search Best-First Search Greedy Search A* Search Sattiraju Prabhakar CS771: Classes,, Wichita State University 3/6/2005 AI_InformedSearch 2 Review: Tree Search What is Informed Search?
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany, Course on Artificial Intelligence,
, University of Hildesheim, Germany, Course on Artificial Intelligence,") Course on Artificial Intelligence, winter term 2012/2013 0/25 Artificial Intelligence Artificial Intelligence 2. Informed Search Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL)
Course on Artificial Intelligence, winter term 2012/2013 0/25 Artificial Intelligence Artificial Intelligence 2. Informed Search Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL)
Solving Problems using Search
 Solving Problems using Search Artificial Intelligence @ Allegheny College Janyl Jumadinova September 11, 2018 Janyl Jumadinova Solving Problems using Search September 11, 2018 1 / 35 Example: Romania On
Solving Problems using Search Artificial Intelligence @ Allegheny College Janyl Jumadinova September 11, 2018 Janyl Jumadinova Solving Problems using Search September 11, 2018 1 / 35 Example: Romania On
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Joschka Boedecker and Wolfram Burgard and Frank Hutter and Bernhard Nebel Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Joschka Boedecker and Wolfram Burgard and Frank Hutter and Bernhard Nebel Albert-Ludwigs-Universität
Introduction to Artificial Intelligence. Informed Search
 Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Artificial Intelligence. 2. Informed Search
 Artificial Intelligence Artificial Intelligence 2. Informed Search Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute of Economics and Information Systems & Institute of
Artificial Intelligence Artificial Intelligence 2. Informed Search Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute of Economics and Information Systems & Institute of
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu. Lecture 3: Search 2.
 Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu Lecture 3: Search 2 http://cs.nju.edu.cn/yuy/course_ai18.ashx Previously... function Tree-Search( problem, fringe) returns a solution,
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu Lecture 3: Search 2 http://cs.nju.edu.cn/yuy/course_ai18.ashx Previously... function Tree-Search( problem, fringe) returns a solution,
Artificial Intelligence. Informed search methods
 Artificial Intelligence Informed search methods In which we see how information about the state space can prevent algorithms from blundering about in the dark. 2 Uninformed vs. Informed Search Uninformed
Artificial Intelligence Informed search methods In which we see how information about the state space can prevent algorithms from blundering about in the dark. 2 Uninformed vs. Informed Search Uninformed
Informed Search. Dr. Richard J. Povinelli. Copyright Richard J. Povinelli Page 1
 Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
Informed search algorithms
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
Searching and NetLogo
 Searching and NetLogo Artificial Intelligence @ Allegheny College Janyl Jumadinova September 6, 2018 Janyl Jumadinova Searching and NetLogo September 6, 2018 1 / 21 NetLogo NetLogo the Agent Based Modeling
Searching and NetLogo Artificial Intelligence @ Allegheny College Janyl Jumadinova September 6, 2018 Janyl Jumadinova Searching and NetLogo September 6, 2018 1 / 21 NetLogo NetLogo the Agent Based Modeling
Introduction to Artificial Intelligence (G51IAI)
") Introduction to Artificial Intelligence (G51IAI) Dr Rong Qu Heuristic Searches Blind Search vs. Heuristic Searches Blind search Randomly choose where to search in the search tree When problems get large,
Introduction to Artificial Intelligence (G51IAI) Dr Rong Qu Heuristic Searches Blind Search vs. Heuristic Searches Blind search Randomly choose where to search in the search tree When problems get large,
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu. Lecture 2: Search 1.
 rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART3) PROBLEM SOLVING AND SEARCH Searching algorithm Uninformed
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART3) PROBLEM SOLVING AND SEARCH Searching algorithm Uninformed
PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE
 Artificial Intelligence, Computational Logic PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE Lecture 3 Informed Search Sarah Gaggl Dresden, 22th April 2014 Agenda 1 Introduction 2 Uninformed Search
Artificial Intelligence, Computational Logic PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE Lecture 3 Informed Search Sarah Gaggl Dresden, 22th April 2014 Agenda 1 Introduction 2 Uninformed Search
CS414-Artificial Intelligence
 CS414-Artificial Intelligence Lecture 6: Informed Search Algorithms Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta)
CS414-Artificial Intelligence Lecture 6: Informed Search Algorithms Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta)
Overview. Path Cost Function. Real Life Problems. COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Friday 17th November (Week 8), 15:00-17:00. Class Test 2 (Everything but Prolog) Friday 15th December
COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Friday 17th November (Week 8), 15:00-17:00. Class Test 2 (Everything but Prolog) Friday 15th December
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Tuesday 8 th November (Week 7) 13:00-14:00 LIFS-LT2 and LIFS-LT3 Class Test 2 (Everything but Prolog)
COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Tuesday 8 th November (Week 7) 13:00-14:00 LIFS-LT2 and LIFS-LT3 Class Test 2 (Everything but Prolog)
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
Informed search algorithms. Chapter 4, Sections 1 2 1
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Joschka Boedecker and Wolfram Burgard and Bernhard Nebel Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Joschka Boedecker and Wolfram Burgard and Bernhard Nebel Albert-Ludwigs-Universität
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
Informed Search and Exploration
 Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
COMP9414/ 9814/ 3411: Artificial Intelligence. 5. Informed Search. Russell & Norvig, Chapter 3. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 18: Informed search algorithms Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 18 1 / 1 In today s lecture
COSC343: Artificial Intelligence Lecture 18: Informed search algorithms Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 18 1 / 1 In today s lecture
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Planning, Execution & Learning 1. Heuristic Search Planning
 Planning, Execution & Learning 1. Heuristic Search Planning Reid Simmons Planning, Execution & Learning: Heuristic 1 Simmons, Veloso : Fall 2001 Basic Idea Heuristic Search Planning Automatically Analyze
Planning, Execution & Learning 1. Heuristic Search Planning Reid Simmons Planning, Execution & Learning: Heuristic 1 Simmons, Veloso : Fall 2001 Basic Idea Heuristic Search Planning Automatically Analyze
TDDC17. Intuitions behind heuristic search. Recall Uniform-Cost Search. Best-First Search. f(n) =... + h(n) g(n) = cost of path from root node to n
 =... + h(n) g(n) = cost of path from root node to n") Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
PEAS: Medical diagnosis system
 PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
TDDC17. Intuitions behind heuristic search. Best-First Search. Recall Uniform-Cost Search. f(n) =... + h(n) g(n) = cost of path from root node to n
 =... + h(n) g(n) = cost of path from root node to n") Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Informed Search and Exploration
 Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 4 Informed Search and Adversarial Search Outline Best-first search Greedy best-first search A* search Heuristics revisited Minimax search
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 4 Informed Search and Adversarial Search Outline Best-first search Greedy best-first search A* search Heuristics revisited Minimax search
Week 3: Path Search. COMP9414/ 9814/ 3411: Artificial Intelligence. Motivation. Example: Romania. Romania Street Map. Russell & Norvig, Chapter 3.
 COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
4. Solving Problems by Searching
 COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2018 Beyond Classical Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed
CS:4420 Artificial Intelligence Spring 2018 Beyond Classical Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 16. State-Space Search: Greedy BFS, A, Weighted A Malte Helmert University of Basel March 28, 2018 State-Space Search: Overview Chapter overview: state-space search
Foundations of Artificial Intelligence 16. State-Space Search: Greedy BFS, A, Weighted A Malte Helmert University of Basel March 28, 2018 State-Space Search: Overview Chapter overview: state-space search
Informed search algorithms
 Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
16.1 Introduction. Foundations of Artificial Intelligence Introduction Greedy Best-first Search 16.3 A Weighted A. 16.
 Foundations of Artificial Intelligence March 28, 2018 16. State-Space Search: Greedy BFS, A, Weighted A Foundations of Artificial Intelligence 16. State-Space Search: Greedy BFS, A, Weighted A Malte Helmert
Foundations of Artificial Intelligence March 28, 2018 16. State-Space Search: Greedy BFS, A, Weighted A Foundations of Artificial Intelligence 16. State-Space Search: Greedy BFS, A, Weighted A Malte Helmert
Contents. Foundations of Artificial Intelligence. General Algorithm. Best-First Search
 Contents Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
Contents Foundations of Artificial Intelligence 4. Informed Search Methods Heuristics, Local Search Methods, Genetic Algorithms Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
Solving Problems by Searching. Artificial Intelligence Santa Clara University 2016
 Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Outline. Informed search algorithms. Best-first search. Review: Tree search. A search Heuristics. Chapter 4, Sections 1 2 4
 Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Automated Planning & Artificial Intelligence
 Automated Planning & Artificial Intelligence Uninformed and Informed search in state space Humbert Fiorino Humbert.Fiorino@imag.fr http://membres-lig.imag.fr/fiorino Laboratory of Informatics of Grenoble
Automated Planning & Artificial Intelligence Uninformed and Informed search in state space Humbert Fiorino Humbert.Fiorino@imag.fr http://membres-lig.imag.fr/fiorino Laboratory of Informatics of Grenoble
Local Search and Optimization Chapter 4. Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )
") Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 Outline Local search techniques and optimization Hill-climbing
Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 Outline Local search techniques and optimization Hill-climbing
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Local Search and Optimization Chapter 4. Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )
") Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 2 Outline Local search techniques and optimization Hill-climbing
Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 2 Outline Local search techniques and optimization Hill-climbing
Informed Search and Exploration
 Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Artificial Intelligence
 Artificial Intelligence Academic year 2016/2017 Giorgio Fumera http://pralab.diee.unica.it fumera@diee.unica.it Pattern Recognition and Applications Lab Department of Electrical and Electronic Engineering
Artificial Intelligence Academic year 2016/2017 Giorgio Fumera http://pralab.diee.unica.it fumera@diee.unica.it Pattern Recognition and Applications Lab Department of Electrical and Electronic Engineering
Optimal Control and Dynamic Programming
 Optimal Control and Dynamic Programming SC Q 7- Duarte Antunes Outline Shortest paths in graphs Dynamic programming Dijkstra s and A* algorithms Certainty equivalent control Graph Weighted Graph Nodes
Optimal Control and Dynamic Programming SC Q 7- Duarte Antunes Outline Shortest paths in graphs Dynamic programming Dijkstra s and A* algorithms Certainty equivalent control Graph Weighted Graph Nodes
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Informatics 2D: Tutorial 2 (Solutions)
") Informatics 2D: Tutorial 2 (Solutions) Adversarial Search and Informed Search Week 3 1 Adversarial Search This exercise was taken from R&N Chapter 5. Consider the two-player game shown in Figure 1. Figure
Informatics 2D: Tutorial 2 (Solutions) Adversarial Search and Informed Search Week 3 1 Adversarial Search This exercise was taken from R&N Chapter 5. Consider the two-player game shown in Figure 1. Figure
Local Search and Optimization Chapter 4. Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )
") Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 2 Outline Local search techniques and optimization Hill-climbing
Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 2 Outline Local search techniques and optimization Hill-climbing
Planning and search. Lecture 1: Introduction and Revision of Search. Lecture 1: Introduction and Revision of Search 1
 Planning and search Lecture 1: Introduction and Revision of Search Lecture 1: Introduction and Revision of Search 1 Lecturer: Natasha lechina email: nza@cs.nott.ac.uk ontact and web page web page: http://www.cs.nott.ac.uk/
Planning and search Lecture 1: Introduction and Revision of Search Lecture 1: Introduction and Revision of Search 1 Lecturer: Natasha lechina email: nza@cs.nott.ac.uk ontact and web page web page: http://www.cs.nott.ac.uk/
Introduction to Computer Science and Programming for Astronomers
 Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
Introduction to Computer Science and Programming for Astronomers Lecture 9. István Szapudi Institute for Astronomy University of Hawaii March 21, 2018 Outline Reminder 1 Reminder 2 3 Reminder We have demonstrated
CS:4420 Artificial Intelligence
 S:4420 rtificial Intelligence Spring 2018 Uninformed Search esare Tinelli The University of Iowa opyright 2004 18, esare Tinelli and Stuart Russell a a These notes were originally developed by Stuart Russell
S:4420 rtificial Intelligence Spring 2018 Uninformed Search esare Tinelli The University of Iowa opyright 2004 18, esare Tinelli and Stuart Russell a a These notes were originally developed by Stuart Russell
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
CS 380: Artificial Intelligence Lecture #4
 CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
CS 380: Artificial Intelligence Lecture #4 William Regli Material Chapter 4 Section 1-3 1 Outline Best-first search Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing
Artificial Intelligence: Search Part 1: Uninformed graph search
 rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
CS-E4800 Artificial Intelligence
 CS-E4800 Artificial Intelligence Jussi Rintanen Department of Computer Science Aalto University January 12, 2017 Transition System Models The decision-making and planning at the top-level of many intelligent
CS-E4800 Artificial Intelligence Jussi Rintanen Department of Computer Science Aalto University January 12, 2017 Transition System Models The decision-making and planning at the top-level of many intelligent
Algorithm. December 7, Shortest path using A Algorithm. Phaneendhar Reddy Vanam. Introduction. History. Components of A.
 December 7, 2011 1 2 3 4 5 6 7 The A is a best-first search algorithm that finds the least cost path from an initial configuration to a final configuration. The most essential part of the A is a good heuristic
December 7, 2011 1 2 3 4 5 6 7 The A is a best-first search algorithm that finds the least cost path from an initial configuration to a final configuration. The most essential part of the A is a good heuristic
Gradient Descent. 1) S! initial state 2) Repeat: Similar to: - hill climbing with h - gradient descent over continuous space
 S! initial state 2) Repeat: Similar to: - hill climbing with h - gradient descent over continuous space") Local Search 1 Local Search Light-memory search method No search tree; only the current state is represented! Only applicable to problems where the path is irrelevant (e.g., 8-queen), unless the path is
Local Search 1 Local Search Light-memory search method No search tree; only the current state is represented! Only applicable to problems where the path is irrelevant (e.g., 8-queen), unless the path is
Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)
![Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)](/thumbs/79/79004084.jpg "Warm- up. IteraAve version, not recursive. class TreeNode TreeNode[] children() boolean isgoal() DFS(TreeNode start)") Warm- up We ll o-en have a warm- up exercise for the 10 minutes before class starts. Here s the first one Write the pseudo code for breadth first search and depth first search IteraAve version, not recursive
Warm- up We ll o-en have a warm- up exercise for the 10 minutes before class starts. Here s the first one Write the pseudo code for breadth first search and depth first search IteraAve version, not recursive
COMP219: Artificial Intelligence. Lecture 7: Search Strategies
 COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
Artificial Intelligence
 Artificial Intelligence Local Search Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler, Stuart Russell, Mausam Systematic Search:
Artificial Intelligence Local Search Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler, Stuart Russell, Mausam Systematic Search:
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Monte Carlo Tree Search PAH 2015
 Monte Carlo Tree Search PAH 2015 MCTS animation and RAVE slides by Michèle Sebag and Romaric Gaudel Markov Decision Processes (MDPs) main formal model Π = S, A, D, T, R states finite set of states of the
Monte Carlo Tree Search PAH 2015 MCTS animation and RAVE slides by Michèle Sebag and Romaric Gaudel Markov Decision Processes (MDPs) main formal model Π = S, A, D, T, R states finite set of states of the
Beyond Classical Search
 Beyond Classical Search Chapter 3 covered problems that considered the whole search space and produced a sequence of actions leading to a goal. Chapter 4 covers techniques (some developed outside of AI)
Beyond Classical Search Chapter 3 covered problems that considered the whole search space and produced a sequence of actions leading to a goal. Chapter 4 covers techniques (some developed outside of AI)
Lecture 4: Local and Randomized/Stochastic Search
 Lecture 4: Local and Randomized/Stochastic Search CS 580 (001) - Spring 2018 Amarda Shehu Department of Computer Science George Mason University, Fairfax, VA, USA February 14, 2018 Amarda Shehu (580) 1
Lecture 4: Local and Randomized/Stochastic Search CS 580 (001) - Spring 2018 Amarda Shehu Department of Computer Science George Mason University, Fairfax, VA, USA February 14, 2018 Amarda Shehu (580) 1
Problem Solving and Search. Geraint A. Wiggins Professor of Computational Creativity Department of Computer Science Vrije Universiteit Brussel
 Problem Solving and Search Geraint A. Wiggins Professor of Computational Creativity Department of Computer Science Vrije Universiteit Brussel What is problem solving? An agent can act by establishing goals
Problem Solving and Search Geraint A. Wiggins Professor of Computational Creativity Department of Computer Science Vrije Universiteit Brussel What is problem solving? An agent can act by establishing goals
Introduction to Artificial Intelligence (G51IAI) Dr Rong Qu. Blind Searches
 Dr Rong Qu. Blind Searches") Introduction to Artificial Intelligence (G51IAI) Dr Rong Qu Blind Searches Blind Searches Function GENERAL-SEARCH (problem, QUEUING-FN) returns a solution or failure nodes = MAKE-QUEUE(MAKE-NODE(INITIAL-STATE[problem]))
Introduction to Artificial Intelligence (G51IAI) Dr Rong Qu Blind Searches Blind Searches Function GENERAL-SEARCH (problem, QUEUING-FN) returns a solution or failure nodes = MAKE-QUEUE(MAKE-NODE(INITIAL-STATE[problem]))
Seminar: Search and Optimization
 Seminar: Search and Optimization 4. asic Search lgorithms Martin Wehrle Universität asel October 4, 2012 asics lind Search lgorithms est-first Search Summary asics asics lind Search lgorithms est-first
Seminar: Search and Optimization 4. asic Search lgorithms Martin Wehrle Universität asel October 4, 2012 asics lind Search lgorithms est-first Search Summary asics asics lind Search lgorithms est-first
Clustering (Un-supervised Learning)
") Clustering (Un-supervised Learning) Partition-based clustering: k-mean Goal: minimize sum of square of distance o Between each point and centers of the cluster. o Between each pair of points in the cluster
Clustering (Un-supervised Learning) Partition-based clustering: k-mean Goal: minimize sum of square of distance o Between each point and centers of the cluster. o Between each pair of points in the cluster
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Problem Solving: Informed Search
 Problem Solving: Informed Search References Russell and Norvig, Artificial Intelligence: A modern approach, 2nd ed. Prentice Hall, 2003 (Chapters 1,2, and 4) Nilsson, Artificial intelligence: A New synthesis.
Problem Solving: Informed Search References Russell and Norvig, Artificial Intelligence: A modern approach, 2nd ed. Prentice Hall, 2003 (Chapters 1,2, and 4) Nilsson, Artificial intelligence: A New synthesis.
Outline. Solving Problems by Searching. Introduction. Problem-solving agents
 Outline Solving Problems by Searching S/ University of Waterloo Sept 7, 009 Problem solving agents and search Examples Properties of search algorithms Uninformed search readth first Depth first Iterative
Outline Solving Problems by Searching S/ University of Waterloo Sept 7, 009 Problem solving agents and search Examples Properties of search algorithms Uninformed search readth first Depth first Iterative
Informed search algorithms
 Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms
 Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search algorithms This lecture topic Chapter 3.5-3.7 Next lecture topic Chapter 4.1-4.2 (Please read lecture topic material before and after each lecture on that topic) Outline Review limitations
Informed search methods
 CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
Why Search. Things to consider. Example, a holiday in Jamaica. CSE 3401: Intro to Artificial Intelligence Uninformed Search
 CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
Artificial Intelligence
 Artificial Intelligence Information Systems and Machine Learning Lab (ISMLL) Tomáš Horváth 16 rd November, 2011 Informed Search and Exploration Example (again) Informed strategy we use a problem-specific
Artificial Intelligence Information Systems and Machine Learning Lab (ISMLL) Tomáš Horváth 16 rd November, 2011 Informed Search and Exploration Example (again) Informed strategy we use a problem-specific
ARTIFICIAL INTELLIGENCE. Informed search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving