Advanced path planning. ROS RoboCup Rescue Summer School 2012
|
|
|
- Beatrice Perkins
- 5 years ago
- Views:
Transcription
1 Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France


2 Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making, control Plus: control architecture, interactions, ambient intelligence systems, learning Decision Perception Action A keyword: autonomy Research domains Cognitive and interactive Robotics Aerial and Terrestrial Field Robotics Human and anthropomorphic motion Bio-informatics, Molecular motion 3 research groups : 12 full time researchers 10 university researchers 4 visitors 50 PhD students 10 post-docs Considered applications: Planetary exploration, Service and personal robotics, virtual worlds and animation, biochemistry, embedded systems, transport, driver assistance, defense, civil safety









3 LAAS Constructive and integrative approach UAVs UGVs Personal robotics Humanoids Field robotics Open source software tools:




4 What am I working on? Field robotics Environment perception and modeling Localization and SLAM Autonomous rover navigation Multi-Robot cooperation
5 Advanced path planning (my) definition of a robot: a machine that moves and whose motions a controlled by a computer (plus: intelligent link between perception and action) Objectives of the lecture: Discover a bit the motion planning scientific corpus Have an overview of the various levels of motion planning Understand some practical means to generate/compute/plan mobile robot motions
6 But what is path planning? Given A current position A goal position Information on the environment Constraints to satisfy / criteria to optimize Find A trajectory that satisfies the constraints / optimizes the criteria A trajectory: a continuous function from time to space Decision Perception Action Decision in this talk = finding how to move


7 But what is path planning? With Google maps (???)

8 For a circular robot amidst obstacles But what is path planning?

9 But what is path planning? For a wheeled robot with a trailer inside a cluttered building [F. LAAS]

10 For a humanoid robot But what is path planning?

11 In a intervention or rescue context But what is path planning? Send fire extinguisher robots there
12 Outline Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems
13 Consider a punctual (0 width) robot Configuration space Start Goal There are plenty of solution trajectories And there is a shortest one
14 Configuration space Now consider a round shaped robot (radius r) Cannot go this way! Start Goal
15 Configuration space Now consider a round shaped robot (radius r) Start Goal After growing the obstacles, we are back to the point problem
16 Now consider a rectangular robot Not OK! Configuration space Start Goal OK
17 Configuration space Now consider a rectangular robot with kinematic constraints (e.g. a car) Reachable Start Goal Unreachable Impossible to go through this way! The feasable paths are much more difficult to find...
18 Configuration space Now consider a rectangular robot with kinematic constraints (e.g. a car) Reachable Unreachable Shortest path and finding the shortest path is not so easy, even when there is no obstacle
 configuration space There is a mapping between the CS and the world space A path is a continuous set of configurations")
19 Configuration of a robot: set of independent parameters that specify the position and orientation of every component of the robot Configuration space Robot configurations Associated (q 1,q 2 ) configuration space There is a mapping between the CS and the world space A path is a continuous set of configurations
 + numerous internal degrees of freedm: very high dimension configuration space")
20 Configuration space Case of a robot in the plane: 2D environment 3 configuration parameters: 3D configuration space Case of a humanoid robot 3D environment 3 position parameters (no a plane) + numerous internal degrees of freedm: very high dimension configuration space

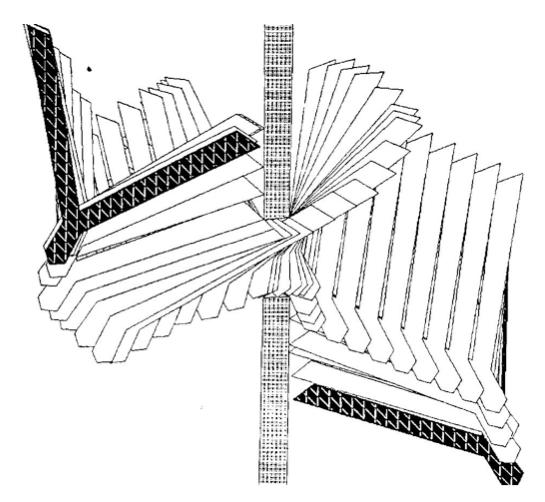
21 Obstacles in the configuration space Case of a triangular robot on the plane:

22 Obstacles in the configuration space Case of a triangular robot on the plane: A rectangular obstacle in the configuration space

23 Obstacles in the configuration space

24 Obstacles in the configuration space
25 Searching for paths A complete algorithm: find a solution if one exists, reports if not General complete algorithms have been proposed, but are not tractable in practice Complexity: grows exponentially with n, the CS dimension Difficult geometric computations (requires infinite precision) Weaker notions of completeness: Resolution completeness: based on a systematic discretisation of the CS Probabilistic completeness: the probability of finding a solution converges to 1 with infinite time
26 Searching for paths Two search families: Graph search Build a graph that captures the topology of the CS Can handle multiple query Building a search tree No attempt to capture the topology of the CS Goal dependant (single query)
 2.")
27 Approach 1: visibility graph Given a polygonal environment description 1. Build the graph (considering start and goal as nodes) 2. Shortest path search in the graph

28 Approach 2: Voronoi diagram



29 Approach 3: Cellular decomposition Exact triangular decomposition Approximate decomposition Overall principle of the search
 3.")

30 Probabilistic roadmaps Principle: 1. Randomly sample the CS with configurations 2. Keep the collision-free configurations (milestones) 3. Connect pairs of milestones with feasable paths Two requirements: Allows to solve very difficult path planning problems Ability to check collisions in the working space Ability to find a path between close configurations

31 Complex geometric plans


32 Path planning techniques for biochemistry Simulation of conformation change of a protein Accessibility of a ligand to the active site of a protein
33 But wait Given A current position A goal position Information on the environment? Constraints to satisfy / criteria to optimize Find A trajectory that satisfies the constraints / optimizes the criteria
34 Outline Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems
35 Potential fields Principle: the robot is influenced by external virtual forces Obstacles generate repulsive forces The goal generates an attractive force All the forces are applied to the robot: the resulting force is the direction of motion to execute
36 Potential fields Advantage: very simple to implement. Can even work directly on the raw data R Resulting force Goal Difficulty: local minima ( potential wells ) R Goal Resulting force = 0 Everything relies on the analytic definition of the forces
37 Indoor environment (Raw 2D LRF data) Potential fields


38 Potential fields Illustration Attractive potential Repulsive potential

39 Potential fields Outdoor environment (probabilistic obstacle model) Classic potential Rotation potential Consideration of kinematic constraints: select on which point is applied the resulting force

40 Potential fields

41 Summary of a typical run Potential fields
42 Potential fields: summary Closer to automatic control than to autonomy : one stimulus, one response ( reactive motion mode) Decision Perception Action Well suited for easy environments with scarce obstacles Otherwise calls for a lot ot tuning See also «Vector field histograms» [Borenstein 91/98]
43 Outline Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems

 Selection based on: Risk")
 Interest of an arc")
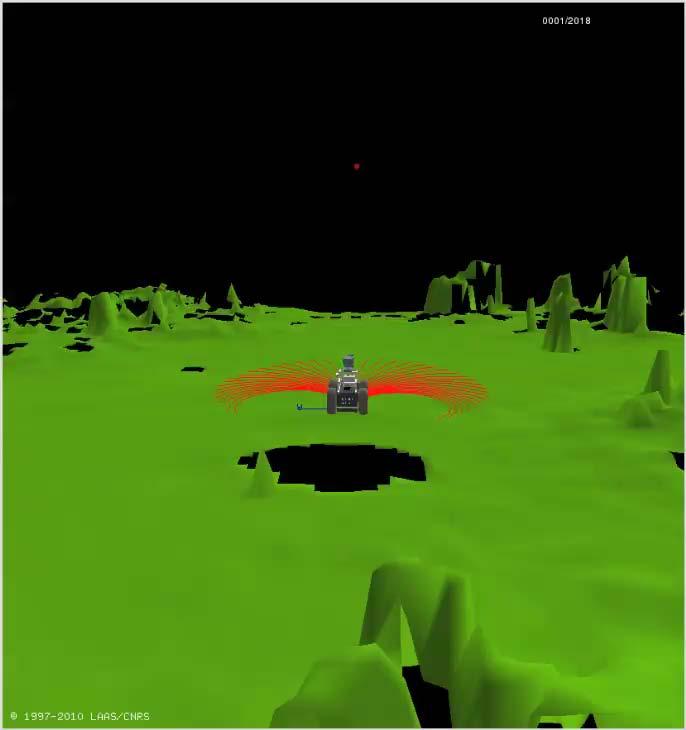
44 Short term path planning Elementary trajectory generation: evaluation of a set of elementary (v,ω) commands (circle arcs) Selection based on: Risk or cost of an arc (collision or terrain traversability) Interest of an arc (goal direction)

45 Illustration Short term path planning

46 Short term path planning Illustration with the Mars Exploration Rovers (2004)
")

47 But what is an obstacle? ~ OK for indoor environments Occupancy grid (P(Obst) on a regular Cartesian grid) But what about unstructured outdoor environments? Digital Terrain Model (z=f(x,y) on a regular Cartesian grid)



")
48 But what is an obstacle? Probabilistic obstacle detection (qualitative, conservative) 1. Discretisation of the perceived area (here with stereovision) 2. Probabilistic labelling Flat Obstacle Unknown Correlated pixels Labeling (top view) labeling (sensor view)
")
49 But what is an obstacle? Probabilistic obstacle detection (qualitative, conservative) Can be extended to «semantic» mapping


, the chassis state")

50 But what is an obstacle? Precise obstacle detection on a DTM «Convolution» of the terrain and the robot model For a given position (x,y,θ), the chassis state is determined, the safety of the position is assessed

51 But what is an obstacle? Illustration with the Mars Exploration Rovers (2004)



52 Short term path planning on a DTM Evaluation of the sequence of positions corresponding to an elementary command


53 Illustration at 1.5 m/s Short term path planning on a DTM
 Goal Explore further")
54 Extending the planning horizon Dead-end: local approaches can not find any solution (potential-based approaches don t do better) Goal Explore further


![[Kelly-JFR-2009]](/docs-images/84/89554993/images/55-2.jpg "Explicit and easy")
55 Extending the planning horizon Explore further: state lattices [Kelly-JFR-2009] Explicit and easy consideration of kinematic constraints

56 Extending the planning horizon Illustration during the Darpa Urban Challenge
57 But wait again Given A current position A goal position? Information on the environment Constraints to satisfy / criteria to optimize Find A trajectory that satisfies the constraints / optimizes the criteria
58 Outline Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems
59 Navigation strategies Given A current position An objective (far away goal, area to map/explore) Information on the environment Constraints to satisfy / criteria to optimize Find A itinerary that satisfies the constraints / optimizes the criteria Where should the robot head? How should it head there? What for? An itinerary is akin to a coarse trajectory: sequence of waypoints, enriched with tasks and modalities
60 Navigation strategies


61 Navigation strategies For instance: How to reach the twin peaks?

62 Where to go and what for? Navigation strategies
63 Navigation strategies How to go there? A huge variety of situations Several motion modes, adapted to the situation at hand Potential Local arcs Route following Who selects, configures and controls the navigation modes?
64 Navigation strategies How to go there? A huge variety of situations Navigation strategies, a higher level instance of the perception / decision / action loop Decision Perception Action
65 Navigation strategies Now we are really into planning Decision Perception We need dedicated models of: Each available motion mode The environment Navigation mode applicability localisability Quantity/quality of information The perception tasks Localisation Environment modeling Action


66 Navigation strategies Models of the environment: Navigation mode applicability localisability Quantity/quality of information Example 1: exploit existing geographic data

67 Navigation strategies Models of the environment: Navigation mode applicability localisability Quantity/quality of information Example 2: exploit low altitude aerial imagery

68 Navigation strategies Models of the environment: Navigation mode applicability localisability Quantity/quality of information Example 3: build a dedicated model from rover data
69 Navigation strategies Spirit of the solutions Exploit graph search (A*, D*) Turn the goal-finding problem into an information acquisition problem Exploration case: analyse frontiers to assess relevant goals
 Navigation")
70 Illustration with the Mars Exploration Rovers (2009) Navigation strategies
 Navigation")
71 Actual results on Mars (2009) Navigation strategies
 Navigation strategies Target areas")
72 Coming soon with Curiosity? (MSL) Navigation strategies Target areas chosen on Aug. the 17th
73 Outline Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems

74 Crossing obstacles The heavy way Crusher (Darpa / CMU)

75 Crossing obstacles A little bit less heavy way Rhex (Boston Dynamics)


76 Agile robots can be powerful Crossing obstacles

77 Crossing obstacles Smarter ways to cross obstacles? Advanced locomotion control On line evaluation of the masses repartition On line evaluation of the wheel torques

78 Crossing obstacles Smarter ways to cross obstacles? Advanced locomotion control On line evaluation of the masses repartition On line evaluation of the wheel torques On line evaluation of the chassis configuration evolution

79 Stepping into dynamics of motion Going fast
80 But wait one more time Given A current position? A goal position Information on the environment Constraints to satisfy / criteria to optimize Find A trajectory that satisfies the constraints / optimizes the criteria
81 Summary Basic notions Configuration space, kinematic constraints, search algorithms Practical field solutions Potential field approaches Short-term ( reactive ) planning Long-term itineraries Other research problems

82 Some readings
Vision-based navigation
 Vision-based navigation Simon Lacroix To cite this version: Simon Lacroix. Vision-based navigation. Doctoral. Spring School on Location-Based Services, École Nationale d Aviation Civile, Toulouse (France),
Vision-based navigation Simon Lacroix To cite this version: Simon Lacroix. Vision-based navigation. Doctoral. Spring School on Location-Based Services, École Nationale d Aviation Civile, Toulouse (France),
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles
 A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Robotics. CSPP Artificial Intelligence March 10, 2004
 Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
ROBOT NAVIGATION IN VERY COMPLEX, DENSE, AND CLUTTERED INDOOR/OUTDOOR ENVIRONMENTS
 ROBOT NAVIGATION IN VERY COMPLEX, DENSE, AND CLUTTERED INDOOR/OUTDOOR ENVIRONMENTS Javier Minguez Luis Montano Computer Science and Systems Engineering, CPS, University of Zaragoza, Spain Abstract: This
ROBOT NAVIGATION IN VERY COMPLEX, DENSE, AND CLUTTERED INDOOR/OUTDOOR ENVIRONMENTS Javier Minguez Luis Montano Computer Science and Systems Engineering, CPS, University of Zaragoza, Spain Abstract: This
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Safe Prediction-Based Local Path Planning using Obstacle Probability Sections
 Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Autonomous Rover Navigation on Unknown Terrains Demonstrations in the Space Museum Cité de l Espace at Toulouse
 Autonomous Rover Navigation on Unknown Terrains Demonstrations in the Space Museum Cité de l Espace at Toulouse Simon Lacroix, Anthony Mallet, David Bonnafous Grard Bauzil, Sara Fleury, Matthieu Herrb,
Autonomous Rover Navigation on Unknown Terrains Demonstrations in the Space Museum Cité de l Espace at Toulouse Simon Lacroix, Anthony Mallet, David Bonnafous Grard Bauzil, Sara Fleury, Matthieu Herrb,
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011
 Ryan Hamor CPRE 583 September 2011") Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Exploration of an Indoor-Environment by an Autonomous Mobile Robot
 IROS '94 September 12-16, 1994 Munich, Germany page 1 of 7 Exploration of an Indoor-Environment by an Autonomous Mobile Robot Thomas Edlinger edlinger@informatik.uni-kl.de Ewald von Puttkamer puttkam@informatik.uni-kl.de
IROS '94 September 12-16, 1994 Munich, Germany page 1 of 7 Exploration of an Indoor-Environment by an Autonomous Mobile Robot Thomas Edlinger edlinger@informatik.uni-kl.de Ewald von Puttkamer puttkam@informatik.uni-kl.de
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
RoboCup Rescue Summer School Navigation Tutorial
 RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization
 Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Anibal Ollero Professor and head of GRVC University of Seville (Spain)
") Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
Architecting for autonomy
 Architecting for autonomy Exploring the landscape Sagar Behere 14 January 2014 Kungliga Tekniska Högskolan Architecting for autonomy 1 / 29 Contents 1 Background: Intelligence and autonomy 2 Architecture
Architecting for autonomy Exploring the landscape Sagar Behere 14 January 2014 Kungliga Tekniska Högskolan Architecting for autonomy 1 / 29 Contents 1 Background: Intelligence and autonomy 2 Architecture
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute A search-algorithm prioritizes and expands the nodes in its open list items by
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute A search-algorithm prioritizes and expands the nodes in its open list items by
Lecture 14: Path Planning II. Autonomous Robots, Carnegie Mellon University Qatar
 Lecture 14: Path Planning II Autonomous Robots, 16-200 Carnegie Mellon University Qatar Overview Logistics Movie Path Planning continued Logistics We will send you detailed feedback on your presentation
Lecture 14: Path Planning II Autonomous Robots, 16-200 Carnegie Mellon University Qatar Overview Logistics Movie Path Planning continued Logistics We will send you detailed feedback on your presentation
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Using 3D Laser Range Data for SLAM in Outdoor Environments
 Using 3D Laser Range Data for SLAM in Outdoor Environments Christian Brenneke, Oliver Wulf, Bernardo Wagner Institute for Systems Engineering, University of Hannover, Germany [brenneke, wulf, wagner]@rts.uni-hannover.de
Using 3D Laser Range Data for SLAM in Outdoor Environments Christian Brenneke, Oliver Wulf, Bernardo Wagner Institute for Systems Engineering, University of Hannover, Germany [brenneke, wulf, wagner]@rts.uni-hannover.de
CS-235 Computational Geometry
 CS-235 Computational Geometry Computer Science Department Fall Quarter 2002. Computational Geometry Study of algorithms for geometric problems. Deals with discrete shapes: points, lines, polyhedra, polygonal
CS-235 Computational Geometry Computer Science Department Fall Quarter 2002. Computational Geometry Study of algorithms for geometric problems. Deals with discrete shapes: points, lines, polyhedra, polygonal
Autonomous Navigation in Unknown Environments via Language Grounding
 Autonomous Navigation in Unknown Environments via Language Grounding Koushik (kbhavani) Aditya (avmandal) Sanjay (svnaraya) Mentor Jean Oh Introduction As robots become an integral part of various domains
Autonomous Navigation in Unknown Environments via Language Grounding Koushik (kbhavani) Aditya (avmandal) Sanjay (svnaraya) Mentor Jean Oh Introduction As robots become an integral part of various domains
Algorithmic Robotics and Motion Planning
 Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Dependency Tracking for Fast Marching. Dynamic Replanning for Ground Vehicles
 Dependency Tracking for Fast Marching Dynamic Replanning for Ground Vehicles Roland Philippsen Robotics and AI Lab, Stanford, USA Fast Marching Method Tutorial, IROS 2008 Overview Path Planning Approaches
Dependency Tracking for Fast Marching Dynamic Replanning for Ground Vehicles Roland Philippsen Robotics and AI Lab, Stanford, USA Fast Marching Method Tutorial, IROS 2008 Overview Path Planning Approaches
A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team
 A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team Antonios Tsourdos Brian White, Rafał Żbikowski, Peter Silson Suresh Jeyaraman and Madhavan Shanmugavel
A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team Antonios Tsourdos Brian White, Rafał Żbikowski, Peter Silson Suresh Jeyaraman and Madhavan Shanmugavel
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS
 COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Safe prediction-based local path planning using obstacle probability sections
 Safe prediction-based local path planning using obstacle probability sections Tanja Hebecker 1 and Frank Ortmeier Abstract Autonomous mobile robots gain more and more importance. In the nearest future
Safe prediction-based local path planning using obstacle probability sections Tanja Hebecker 1 and Frank Ortmeier Abstract Autonomous mobile robots gain more and more importance. In the nearest future
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs
 16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
A Reactive Bearing Angle Only Obstacle Avoidance Technique for Unmanned Ground Vehicles
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
CNES robotics activities : Towards long distance on-board decision-making navigation
 CNES robotics activities : Towards long distance on-board decision-making navigation S.MORENO sabine.moreno@cnes.fr Contents I. Introduction 1.Context 2.Definition II. CNES activities 1.Perception 2.Localisation
CNES robotics activities : Towards long distance on-board decision-making navigation S.MORENO sabine.moreno@cnes.fr Contents I. Introduction 1.Context 2.Definition II. CNES activities 1.Perception 2.Localisation
3D Collision Avoidance for Navigation in Unstructured Environments
 3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Nonholonomic motion planning for car-like robots
 Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Planning With Uncertainty for Autonomous UAV
 Planning With Uncertainty for Autonomous UAV Sameer Ansari Billy Gallagher Kyel Ok William Sica Abstract The increasing usage of autonomous UAV s in military and civilian applications requires accompanying
Planning With Uncertainty for Autonomous UAV Sameer Ansari Billy Gallagher Kyel Ok William Sica Abstract The increasing usage of autonomous UAV s in military and civilian applications requires accompanying
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
t Bench for Robotics and Autonomy Andrea Merlo
 t Bench for Robotics and Autonomy Andrea Merlo Agenda Introduction TBRA Overview Objectives Architecture / Technical Description Status Test Results Roadmap he context of a Rover, dance, Navigation and
t Bench for Robotics and Autonomy Andrea Merlo Agenda Introduction TBRA Overview Objectives Architecture / Technical Description Status Test Results Roadmap he context of a Rover, dance, Navigation and
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
Cognitive Robotics. Robot Cognitive Architectures. Matteo Matteucci
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Cognitive Robotics Robot Cognitive Architectures Matteo Matteucci matteo.matteucci@polimi.it
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Cognitive Robotics Robot Cognitive Architectures Matteo Matteucci matteo.matteucci@polimi.it
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Flow fields PSY 310 Greg Francis. Lecture 25. Perception
 Flow fields PSY 310 Greg Francis Lecture 25 Structure you never knew was there. Perception We have mostly talked about perception as an observer who acquires information about an environment Object properties
Flow fields PSY 310 Greg Francis Lecture 25 Structure you never knew was there. Perception We have mostly talked about perception as an observer who acquires information about an environment Object properties
Attack Resilient State Estimation for Vehicular Systems
 December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
A Path Tracking Method For Autonomous Mobile Robots Based On Grid Decomposition
 A Path Tracking Method For Autonomous Mobile Robots Based On Grid Decomposition A. Pozo-Ruz*, C. Urdiales, A. Bandera, E. J. Pérez and F. Sandoval Dpto. Tecnología Electrónica. E.T.S.I. Telecomunicación,
A Path Tracking Method For Autonomous Mobile Robots Based On Grid Decomposition A. Pozo-Ruz*, C. Urdiales, A. Bandera, E. J. Pérez and F. Sandoval Dpto. Tecnología Electrónica. E.T.S.I. Telecomunicación,
A Three dimensional Path Planning algorithm
 A Three dimensional Path Planning algorithm OUARDA HACHOUR Department Of Electrical and Electronics Engineering Faculty Of Engineering Sciences Signal and System Laboratory Boumerdes University Boulevard
A Three dimensional Path Planning algorithm OUARDA HACHOUR Department Of Electrical and Electronics Engineering Faculty Of Engineering Sciences Signal and System Laboratory Boumerdes University Boulevard