EECS 442 Computer vision. Announcements
|
|
|
- Gladys Baldwin
- 5 years ago
- Views:
Transcription

1 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually no collaborative solutions can ask general questions to GSIs Due by 3pm on Thursday in class Conversation hour tomorrow will used as an extra office hour.
2 EECS 442 Computer vision Volumetric stereo Definition Shape from Contours Shape from Shadows Voxel coloring
3 Traditional Stereo P p p O 1 O 2 Goal: estimate the position of P given the observation of P from two view points Assumptions: known camera parameters and position (K, R, T)
4 Traditional Stereo P p p O 1 O 2 Subgoals: 1. Solve the correspondence problem 2. Use corresponding observations to triangulate
5 Volumetric stereo Scene volume O O Hypothesis: pick up a point within the volume 2. Project this point into 2 (or more) images 3. Validation: are the observations consistent? Assumptions: known camera parameters and position (K, R, T)
6 Consistency based on cues such as: - Contours/silhouettes - Shadows - Colors
7 Apparent contour DEFINITION: projection of the locus of points on the surface which separate the visible and occluded parts on the surface [sato & cipolla] apparent contour Camera Image
8 Silhouettes silhouette Image Camera
9 Why contours are interesting visual cues? Provide information in absence of other visual cues No texture No shading
10 Relatively easy to detect Why contours are interesting visual cues? Object Camera Image Easy contour segmentation
11 How can we use contours? Object Visual cone Image Object apparent contour Camera
12 How can we use contours? Object Camera Image Image object s contour Image object s contour Visual cone in 2D: Camera Image Object
13 View point 1 Object Object The views are calibrated Object estimate (visual hull) View point 2
14 how to perform visual cones intersection? decompose visual cone in polygonal surfaces (among others: Reed and Allen 99)
15 Using contours/silhouettes in volumetric stereo also called Space carving [ Martin and Aggarwal (1983) ] voxel
16 Computing visual hull in 2D
17 Computing visual hull in 2D
18 Computing visual hull in 2D
19 Computing visual hull in 2D Visual hull: an upper bound estimate Consistency: A voxel must be projected into a silhouette in each image
20 Space Carving has complexity O(N 3 ) Octrees (Szeliski 93) N N N
21 Complexity reduction: octrees 1 1 1
22 Complexity reduction: octrees Subdiving volume in voxels of progressive smaller size 2 2 2
23 Complexity reduction: octrees 4 4 4
24 Complexity reduction: 2D example 4 voxels analyzed
25 Complexity reduction: 2D example 16 voxels analyzed
26 Complexity reduction: 2D example 52 voxels analyzed
27 Complexity reduction: 2D example 16x34 voxels analyzed x16 = 617 voxels have been analyzed in total (rather than 32x32 = 1024)
28 Advantages of space carving Robust and simple No need to solve for correspondences
29 Limitations of space carving Accuracy function of number of views Not a good estimate What else?
30 Limitations of space carving Concavities are not modeled Concavity For 3D objects: Are all types of concavities problematic?


31 Limitations of space carving Concavities are not modeled Concavity Visual hull Laurentini (1995) Closest approximation (hyperbolic regions are ok) Conservative

32 Space carving: a classic setup Camera Object Courtesy of seitz & dyer Turntable



33 Space carving: a classic setup


34 Space carving: Experiments 24 poses (15 O ) voxel size = 2mm 6cm 10cm

 voxel size =")
35 Space carving: Experiments 30 cm 24 poses (15 O ) voxel size = 1mm


36 Space carving: Conclusions Robust Produce conservative estimates Concavities can be a problem Low-end commercial 3D scanners blue backdrop turntable
 Vaillant and Faugeras (1992) Ponce ( 92), Zheng( 94) Furukawa et al.")
37 Contours in the computer vision literature Analyzing changes in apparent contours Giblin and Weiss (1987) Cipolla and Blake (1992) Vaillant and Faugeras (1992) Ponce ( 92), Zheng( 94) Furukawa et al. ( 05 ) Picture from of Sato & Cipolla
38 Volumetric stereo Definition Shape from Contours Shape from Shadows Voxel coloring


39 Self-shadows are visual cues for shape recovery Self-shadows indicate concavities (no modeled by contours)
40 Shape from shadow in the literature Shafer & Kanade ( 83) Hatzitheodorou & Kender ( 89) et al Hatzitheodorou & Kender ( 89) shape as a 2.5D terrains -- i.e. surface modeled as f(x) accurate shadow detection i.e. x b and x e
 Using shadows in volumetric stereo accurate shadow detection i.e. x b and x e")
41 Shape from shadow in the literature Shafer & Kanade ( 83) Hatzitheodorou & Kender ( 89) et al Hatzitheodorou & Kender ( 89) shape as a 2.5D terrains -- i.e. surface modeled as f(x) Using shadows in volumetric stereo accurate shadow detection i.e. x b and x e



42 Shadow Carving Savarese et al 01 Self-shadows + Robust with respect to shadow estimates Object with arbitrary topology (no 2.5D terrains) Object s upper bound
43 Shadow carving: setup Object Light Camera Image Let s define a 2D model
44 2D slice model Object Light Camera Image
45 2D slice model Object Light From 3D to 2D Camera Image Object Image line Camera Light
46 The idea Object s upper bound Object Shadow Image line Camera Image shadow Light
47 The idea Object s upper bound Object Shadow Image line Camera Image shadow Light
48 The idea Object s upper bound Image line Object Shadow Camera Image shadow Light
49 The idea Object s upper bound Image line Object Shadow Camera Image shadow Light
50 The idea Object s upper bound Image line Object Shadow Camera Image shadow Light

51 The idea Object s upper bound Image line Object Shadow Camera Image shadow Light


52 The idea Reconstruction after 3 iterations
53 Algorithm: step k Camera Image Image line Light source Image shadow Upper-bound from step k-1 Object
54 Algorithm: step k Camera Image Image line dual image shadow Light source Image shadow? Upper-bound from step k-1 Object
55 Algorithm: step k Camera Image Image line dual image shadow Light source Image shadow? Object Upper-bound from step k-1 Consistency: A voxel must be projected into both image shadow and dual image shadow
56 What can we carve? Camera Image Image line light image shadow Light source Image shadow No further volume can be removed Upper-bound from step k-1 Carving process always conservative Proof of correctness Object
57 Algorithm: step k Camera Image Image line light image shadow Light source Image shadow Upper-bound from step k-1 Complexity? O(2N 3 ) Object




58 Shadow carving: the setup Camera Object Array of lights Turntable



59 Shadow carving: the setup Camera Object Array of lights Turntable

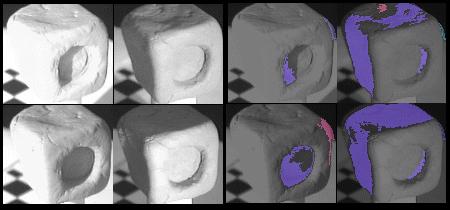
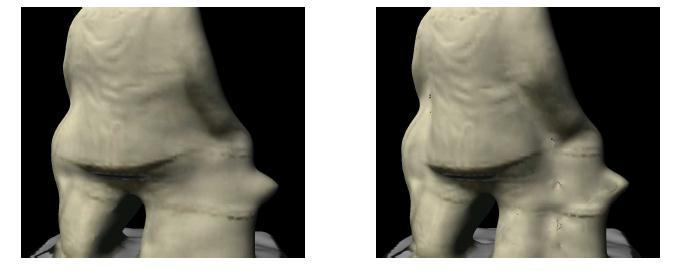
60 Experimental results

61 Simulating the system with 3D studio Max - 24 positions - 4 lights - 72 positions - 8 lights
62 - 24 positions - 4 lights - 72 positions - 8 lights

63 - 16 positions - 4 lights
64
65 Shadow carving: summary Produces a conservative volume estimate Accuracy depending on view point and light source number Limitations with specular & low albedo regions
66 Volumetric stereo Definition Shape from Contours Shape from Shadows Voxel coloring
67 Voxel Coloring Seitz & Dyer ( 97) R. Collins (Space Sweep, 96) color/photo-consistency Jointly model structure and appearance
68 Basic idea Is this voxel in or out? View1 View2 View3
69 Basic idea View1 View2 View3

70 Uniqueness Multiple consistent scenes Ijcv seitz & dyer
71 Uniqueness Multiple consistent scenes Ijcv seitz & dyer
72 Tractability N M colors N N Combinatorial number possible assignments! Exhaustive search not feasible Model occlusions! Use visibility constraint

73 The algorithm C
74 Algorithm complexity voxel coloring visits each N 3 voxels only once project each voxel into L images O(L N 3 ) NOTE: not function of the number of colors
75 Photoconsistency test = corr (, ) Image 1 Image 2 If < Thresh voxel consistent

 I")
76 A critical assumption: Lambertian surfaces I 1 (p) I 1 (p) = I 2 (p) I 2 (p)

77 Non Lambertian surfaces



78 Experimental results Dinosaur 72 k voxels colored 7.6 M voxels tested 7 min to compute on a 250MHz

79 Experimental results Flower 70 k voxels colored 7.6 M voxels tested 7 min to compute on a 250MHz

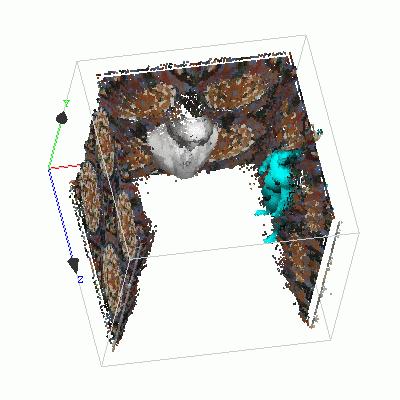
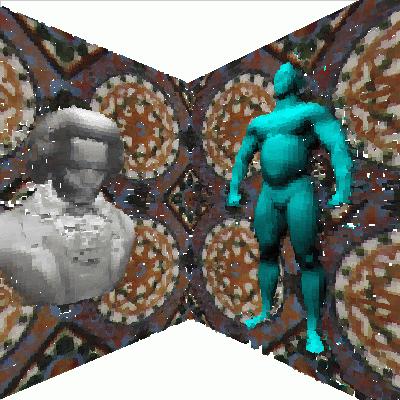
80 Room + weird people Experimental results
81 Voxel coloring: conclusions Good things: model intrinsic scene colors and texture no assumptions on scene topology
82 Voxel coloring: conclusions Good things: model intrinsic scene colors and texture no assumptions on scene topology Limitations: Constrained camera positions Lambertian assumption
83 space carving Space carving is a binary voxel coloring out in
84 Shadow carving Camera Light source ^ S no visibility constraint needed
85 Further contributions A Theory of Space Carving (Kutulakos & Seitz 99) Voxel coloring in more general framework No restrictions on camera position Probabilistic Space Carving (Broadhurst & Cipolla, ICCV 2001) (Bhotika, Kutulakos et. al, ECCV 2002)
86 Next lecture Affine Structure from Motion
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
What Do N Photographs Tell Us About 3D Shape?
 What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Shadow Carving. zibm T. J. Watson Research Center P.O. Box 704, Yorktown Heights, NY 10598
 Shadow Carving Silvio Savaresey Holly Rushmeierz Fausto Bernardiniz ietro eronay ycalifornia Institute of Technology Mail stop 36-93, asadena, CA 95 fsavarese,peronag@vision.caltech.edu zibm T. J. Watson
Shadow Carving Silvio Savaresey Holly Rushmeierz Fausto Bernardiniz ietro eronay ycalifornia Institute of Technology Mail stop 36-93, asadena, CA 95 fsavarese,peronag@vision.caltech.edu zibm T. J. Watson
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
 COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University of Rochester Rochester, NY USA
 To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
Carving from ray-tracing constraints: IRT-carving
 arving from ray-tracing constraints: IRT-carving M. Andreetto, S. Savarese, P. Perona Dept. Electrical Engineering Beckman Institute alifornia Institute of Technology University of Illinois Urbana-hampaign
arving from ray-tracing constraints: IRT-carving M. Andreetto, S. Savarese, P. Perona Dept. Electrical Engineering Beckman Institute alifornia Institute of Technology University of Illinois Urbana-hampaign
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Visual Shapes of Silhouette Sets
 Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Judging Whether Multiple Silhouettes Can Come from the Same Object
 Judging Whether Multiple Silhouettes Can Come from the Same Object David Jacobs 1, eter Belhumeur 2, and Ian Jermyn 3 1 NEC Research Institute 2 Yale University 3 New York University Abstract. We consider
Judging Whether Multiple Silhouettes Can Come from the Same Object David Jacobs 1, eter Belhumeur 2, and Ian Jermyn 3 1 NEC Research Institute 2 Yale University 3 New York University Abstract. We consider
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp
 Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Shape from the Light Field Boundary
 Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
A Probabilistic Framework for Surface Reconstruction from Multiple Images
 A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization
 Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model
 Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency
 1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
Study of Volumetric Methods for Face Reconstruction
 Study of Volumetric Methods for Face Reconstruction Gang ZENG Sylvain PARIS Dep. of Computer Science ARTIS / GRAVIR-IMAG HKUST INRIA Rhône-Alpes Clear Water Bay, Kowloon, Hong Kong 38334 Saint Ismier,
Study of Volumetric Methods for Face Reconstruction Gang ZENG Sylvain PARIS Dep. of Computer Science ARTIS / GRAVIR-IMAG HKUST INRIA Rhône-Alpes Clear Water Bay, Kowloon, Hong Kong 38334 Saint Ismier,
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS INTRODUCTION
 PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Surface Model Reconstruction of 3D Objects From Multiple Views
 Surface Model Reconstruction of 3D Objects From Multiple Views Vincenzo Lippiello and Fabio Ruggiero Abstract A points surface reconstruction algorithm of 3D object models from multiple silhouettes is
Surface Model Reconstruction of 3D Objects From Multiple Views Vincenzo Lippiello and Fabio Ruggiero Abstract A points surface reconstruction algorithm of 3D object models from multiple silhouettes is
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
3D Digitization of a Hand-held Object with a Wearable Vision Sensor
 3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
Visual Hull Construction in the Presence of Partial Occlusion
 Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms
 A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms Steven M. Seitz Brian Curless University of Washington James Diebel Stanford University Daniel Scharstein Middlebury College Richard
A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms Steven M. Seitz Brian Curless University of Washington James Diebel Stanford University Daniel Scharstein Middlebury College Richard
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
External Anatomical Shapes Reconstruction from Turntable Image Sequences using a Single off-the-shelf Camera
 External Anatomical Shapes Reconstruction from Turntable Image Sequences using a Single off-the-shelf Camera Teresa C. S. Azevedo INEGI Inst. de Eng. Mecânica e Gestão Industrial, LOME Lab. Óptica e Mecânica
External Anatomical Shapes Reconstruction from Turntable Image Sequences using a Single off-the-shelf Camera Teresa C. S. Azevedo INEGI Inst. de Eng. Mecânica e Gestão Industrial, LOME Lab. Óptica e Mecânica
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Polyhedral Visual Hulls for Real-Time Rendering
 Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
3D Reconstruction Using Silhouettes from Unordered Viewpoints
 3D Reconstruction Using Silhouettes from Unordered Viewpoints Chen Liang Kwan-Yee K. Wong Department of Computer Science, The University of Hong Kong, Pokfulam, Hong Kong SAR, China Abstract In this paper,
3D Reconstruction Using Silhouettes from Unordered Viewpoints Chen Liang Kwan-Yee K. Wong Department of Computer Science, The University of Hong Kong, Pokfulam, Hong Kong SAR, China Abstract In this paper,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection
 3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
Model-Based Multiple View Reconstruction of People
 Model-Based Multiple View Reconstruction of People Jonathan Starck and Adrian Hilton Centre for Vision, Speech and Signal Processing University of Surrey, Guildford, GU2 7XH, UK. e-mail: {j.starck, a.hilton}@eim.surrey.ac.uk
Model-Based Multiple View Reconstruction of People Jonathan Starck and Adrian Hilton Centre for Vision, Speech and Signal Processing University of Surrey, Guildford, GU2 7XH, UK. e-mail: {j.starck, a.hilton}@eim.surrey.ac.uk
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Modeling, Combining, and Rendering Dynamic Real-World Events From Image Sequences
 Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
A BENCHMARK DATASET FOR PERFORMANCE EVALUATION OF SHAPE-FROM-X ALGORITHMS
 A BENCHMARK DATASET FOR PERFORMANCE EVALUATION OF SHAPE-FROM-X ALGORITHMS Bellmann Anke, Hellwich Olaf, Rodehorst Volker, Yilmaz Ulas Berlin University of Technology, Sekr. 3-1, Franklinstr. 28/29, 10587
A BENCHMARK DATASET FOR PERFORMANCE EVALUATION OF SHAPE-FROM-X ALGORITHMS Bellmann Anke, Hellwich Olaf, Rodehorst Volker, Yilmaz Ulas Berlin University of Technology, Sekr. 3-1, Franklinstr. 28/29, 10587
Photorealistic Scene Reconstruction by Voxel Coloring
 In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
A Theory of Shape by Space Carving
 Submitted to IEEE PAMI. Earlier version appeared as U. Rochester C.S. Dept. 1998. TR #680, Jan. A Theory of Shape by Space Carving Kiriakos N. Kutulakos Department of Computer Science University of Rochester
Submitted to IEEE PAMI. Earlier version appeared as U. Rochester C.S. Dept. 1998. TR #680, Jan. A Theory of Shape by Space Carving Kiriakos N. Kutulakos Department of Computer Science University of Rochester
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
3D Reconstruction through Segmentation of Multi-View Image Sequences
 3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
View Synthesis using Convex and Visual Hulls. Abstract
 View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Probabilistic visibility for multi-view stereo
 Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
Reconstruction of sculpture from its profiles with unknown camera positions
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. XX, NO. Y, MONTH YEAR 1 Reconstruction of sculpture from its profiles with unknown camera positions Kwan-Yee K. Wong and Roberto Cipolla, Member, IEEE Abstract
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. XX, NO. Y, MONTH YEAR 1 Reconstruction of sculpture from its profiles with unknown camera positions Kwan-Yee K. Wong and Roberto Cipolla, Member, IEEE Abstract
Multi-View 3D Reconstruction of Highly-Specular Objects
 Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Complex 3D Shape Recovery Using a Dual-Space Approach
 Complex 3D Shape Recovery Using a Dual-Space Approach Chen Liang and Kwan-Yee K. Wong Department of Computer Science, University of Hong Kong, Hong Kong SAR, China {cliang, kykwong}@cs.hku.hk Abstract
Complex 3D Shape Recovery Using a Dual-Space Approach Chen Liang and Kwan-Yee K. Wong Department of Computer Science, University of Hong Kong, Hong Kong SAR, China {cliang, kykwong}@cs.hku.hk Abstract
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Simplified Belief Propagation for Multiple View Reconstruction
 Simplified Belief Propagation for Multiple View Reconstruction E. Scott Larsen Philippos Mordohai Marc Pollefeys Henry Fuchs Department of Computer Science University of North Carolina at Chapel Hill Chapel
Simplified Belief Propagation for Multiple View Reconstruction E. Scott Larsen Philippos Mordohai Marc Pollefeys Henry Fuchs Department of Computer Science University of North Carolina at Chapel Hill Chapel
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Multi-view photometric stereo
 1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Multiview Photometric Stereo
 548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
A Probabilistic Framework for Space Carving
 A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Shape and Motion Carving in 6D
 To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman. Lecture 11 Geometry, Camera Calibration, and Stereo.
 6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
Department of Computer Engineering, Middle East Technical University, Ankara, Turkey, TR-06531
 INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction
 Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction Amit Banda 1,Rajesh Patil 2 1 M. Tech Scholar, 2 Associate Professor Electrical Engineering Dept.VJTI, Mumbai, India Abstract
Review on Feature Detection and Matching Algorithms for 3D Object Reconstruction Amit Banda 1,Rajesh Patil 2 1 M. Tech Scholar, 2 Associate Professor Electrical Engineering Dept.VJTI, Mumbai, India Abstract
Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving
 Boston University Computer Science Tech. Report BUCS-TR-23-25, December 5, 23 Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving John Isidoro and Stan
Boston University Computer Science Tech. Report BUCS-TR-23-25, December 5, 23 Contour Generator Points for Threshold Selection and a Novel Photo-Consistency Measure for Space Carving John Isidoro and Stan
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
International Journal for Research in Applied Science & Engineering Technology (IJRASET) A Review: 3D Image Reconstruction From Multiple Images
 A Review: 3D Image Reconstruction From Multiple Images") A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
Silhouette Coherence for Camera Calibration under Circular Motion
 1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Affine Surface Reconstruction By Purposive Viewpoint Control
 Affine Surface Reconstruction By Purposive Viewpoint Control Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 14627-0226 USA Abstract We
Affine Surface Reconstruction By Purposive Viewpoint Control Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 14627-0226 USA Abstract We
Reconstruction of sculpture from its profiles with unknown camera positions
 Title Reconstruction of sculpture from its profiles with unknown camera positions Author(s) Wong, KYK; Cipolla, R Citation Ieee Transactions On Image Processing, 2004, v. 13 n. 3, p. 381-389 Issued Date
Title Reconstruction of sculpture from its profiles with unknown camera positions Author(s) Wong, KYK; Cipolla, R Citation Ieee Transactions On Image Processing, 2004, v. 13 n. 3, p. 381-389 Issued Date
MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION
 MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION S. Nobuhara, Y. Tsuda, T. Matsuyama, and I. Ohama Advanced School of Informatics, Kyoto University,
MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION S. Nobuhara, Y. Tsuda, T. Matsuyama, and I. Ohama Advanced School of Informatics, Kyoto University,