Volume-based Ambient Occlusion with Voxel Fragmentation
|
|
|
- Charles Kelly
- 5 years ago
- Views:
Transcription
1 ITN, Norrköping December 21, 2012 Volume-based Ambient Occlusion with Voxel Fragmentation PROJECT IN TECHNOLOGY FOR ADVANCED COMPUTER GAMES TSBK03 Christopher Birger Erik Englesson Anders Hedblom
2 Abstract Ambient occlusion is an effect for approximating the difficulty for light to reach tight areas in a 3D scene. Its purpose is to enhance realism in computer graphics without the necessity of using physically based methods that are often very computationally heavy. Ambient occlusion also increases our ability to perceive 3D objects. The effect can be achieved with several different methods but the basic idea is that the more close geometry that can be seen from a point, the darker it will be. For this project, as a part of the course Technology for Advanced Video Games - TSBK03, we created a volume-based ambient occlusion pass renderer. We voxelize the scene and store it as volume data in a 3D texture, which is sent into the graphics pipeline. A Sparse Voxel Octree was also implemented on the CPU. This can be visualized during runtime. 1 Introduction In real time rendering applications there is not much room for accurate lighting calculations and therefore many tricks must be used to achieve believable results. If the lack of available computation time was not the case, the obvious choice would be to calculate a full global illumination model. Global illumination can be calculated using ray tracing methods where rays are sent from the camera and are then followed through the scene, to any of the light sources. At each surface hit, the irradiance, i.e, the incoming light is calculated by integrating all possible directions over the hemisphere, with respect to the normal of the surface. Practically, this means that a set number of rays are spawned at each surface hit and ray traced further into the scene. Because of this recursive nature, ray traced global illumination can t be used in real time application. Compared to a local illumination model where each point is treated without regards to any other point, global illumination depends on the scene complexity. When objects are close together and the hemisphere is partially occluded, less light will fall onto such points. This is exactly what ambient occlusion tries to approximate, i.e, how much of the hemisphere is occluded and how close other objects are. Ambient occlusion have been shown to increase the perception of scene geometry and aid in the apprehension of three dimensional objects or depth. Ambient occlusion can easily be solved with ray tracing techniques but in most real-time applications this is far too expensive to compute. In the standard graphics pipeline today there is no natural way of accessing all of the scene geometry. Therefore, there has been much research about ambient occlusion using much faster methods. Ambient occlusion was made popular in real-time applications with Screen Space Ambient Occlusion (SSAO) [1], which is a really fast method that can be calculated purely in a fragment shader. Ambient occlusion is an approximation of light behavior due to the fact that it manipulates ambient light, which is also just a fake component in lighting. Ambient light is a very crude approximation for how light bounces around in a scene with diffuse surfaces. This causes objects to seem lit somewhat from all directions, not just the directions of the light sources. Ambient light ignores the shape of all geometry in the scene and does not therefore contribute to any realism. Setting the ambient intensity in a scene implies that all fragments get a lower illumination threshold, that all other light is added to. As the name states, ambient occlusion reduces this threshold for tight areas by subtracting an occlusion value from the ambient intensity. Even though SSAO is a very effective way of creating the AO effect in real-time, it definitely has some quality flaws. There are other fast methods for creating AO, such as different volume-based approaches. By storing all geometry as volume data in a texture, it is possible to create ambient occlusion on the GPU, yet still having it view-independent and converging towards a correct result. In this project, we have implemented a volume-based ambient occlusion pass renderer that uses this principle. 1
3 2 Ambient Occlusion In global illumination light is considered to reflect in directions over the hemisphere at each point in the scene. How much and which directions the light reflects in, is modeled through a bidirectional reflectance distribution function, f, which depends on the incoming light direction, the viewing direction and the surface normal. If the surface is a perfectly diffuse, the BRDF is constant, since light is reflected uniformly over the hemisphere. Ambient occlusion stems from the fact that in narrow spaces such as corners, the hemisphere over these points will be partially covered. This will result in that such areas will not receive as much light as open areas. If we consider the rendering equation that calculates the excitant radiance in a direction,ˆω o, from a point, x, as in equation 1. L o ( x, ˆω o ) = L i ( x, ˆω i )f( x, ˆω i, ˆω o )V ( x, ˆω i )(ˆω i ˆn)dˆω i Ω (1) the hemisphere will become occluded. However, in equation 2 there is nothing that models how close a surface is when evaluating the visibility function. Therefore, all points in this box would evaluate to the same ambient occlusion value. Using this intuition and the approximation made, we end up with a final ambient occlusion integral. A x = 1 π Ω V ( x, ˆω i )τ( x, x i )(ˆω i ˆn)dˆω i (3) Where τ( x, x i ) is the attenuation function and x i is the intersection point if there is any. The most accurate solution to this integral is to use some sort of ray tracing method. In ray tracing, the integral is discretized into a sum over the hemisphere. The hemisphere is divided into set number of regions which corresponds to multiple directions, ˆω i. For each direction a ray is sent out in the scene. If the ray intersects the scene the visibility is evaluated to one and the ray is terminated. Figure 1 depicts two different surface points in the scene. Where L i ( x, ˆω i ) is the incoming irradiance from direction ˆω i, V ( x, ˆω i ) is the visibility function which is either 0 or 1. The last term, (ˆω i ˆn), models the fact that incoming light is projected onto a greater surface when the angle between the surface normal and incoming direction increases. Again, if we now consider that all the surface are perfectly diffuse and that we replace the incoming irradiance, L i, with a constant ambient light source, L a, we get the following equation. L o ( x, ˆω o ) = L a Ω V ( x, ˆω i )(ˆω i ˆn)dˆω i (2) The ambient light term is an approximation to the indirect lighting in the scene, which is often used in local lighting models where the position of the light source is not taken into account. It is now clear that when the hemisphere is occluded, the point will receive less light and vice versa. This happens to be very close to the ambient occlusion equation but we also need to add an attenuation function. Consider that we are looking inside an infinitely large room. Corners in the room should become darker since parts of Figure 1: Visualization of ambient occlusion at two surface points A and B. In figure 1, The AO value in point A is low since only two rays hit another surface far away at a high angle between the normal and the ray. The ambient occlusion at point B is high though, since many of the rays find close surfaces for rays with directions close to the normal. Ray traced ambient occlusion converges to a correct result when more and more rays are used. This method is too slow for real-time applications, but is commonly used as a reference to the ground truth when comparing approximating real-time algorithms. Some of the most common real-time approaches are detailed in the following sections. 2

4 Figure 2: A comparison between different methods for creating AO. 2.1 Different approaches to AO We can conclude that ray casting the scene is a correct way of achieving the ambient occlusion effect, however, as it is so computationally heavy, the method is not feasible in real-time applications. In static scenes, it is possible to pre-render an ambient occlusion pass once, and apply this during runtime as a texture. This can give really nice and smooth shadows for most times, but immediately becomes a problem when objects start to move around. In todays games, physics and object manipulation is often as important part as the graphics, making it necessary to use other methods than ray casting if AO should be a part of the game. Listed below are some well used illumination methods, for offline renderings, that do not really require the application of additional AO as they already tries to simulate the behaviour of light. Listed are also some ways of doing fast AO, mostly for real-time usage, where the effect has to be calculated in every single frame. Offline methods Ray-tracing Photon mapping Radiosity Real-time methods SSAO - Screen Space Ambient Occlusion HBAO - Horizon Based Ambient Occlusion Volume-based AO 2.2 SSAO Screen-Space Ambient Occlusion [1] is a very fast and effective method for achieving the AO effect in real-time. It was developed at the Crytek company and made its debut in their game Crysis, The mind behind the technique is Vladimir Kajalin, who came up with the brilliant idea of using the built-in depth buffer, in the rendering pipeline, to calculate the occlusion values. The depth values are compared for objects that are close to each other in the view plane and based on their difference, a final AO intensity can be derived. Due to the fact that SSAO uses the camera depth buffer, it has to be calculated for every frame. Though, thanks to its efficiency this is fully possible without affecting the frame rate too much. SSAO quickly became the standard for AO in games and is still being used today. However, it definitely suffers from a few problems; the method can only take visible geometry into account. Objects that are outside the view plane or blocked by other objects are simply ignored. It also has difficulties in managing object edges. When a foreground object pixel is compared to a pixel belonging to the background, you may get huge differences in depth. This can cause problems when trying to blur the effect, to smooth out noise and aliasing, which can result in strange glorias around objects. Also, areas that are very occluded from the sides (in respect to camera direction) might appear brighter than they should due to lack of variance in depth. Therefore, SSAO will never converge to a correct result, no matter how many samples that are used. 3
5 2.2.1 How it works SSAO has the advantage that it is implemented purely in a fragment shader, which takes a framebuffer copied texture as input. This makes any RAM fetches redundant, thus increases the computing efficiency. The AO dedicated fragment shader reads the depth value for a pixel and compares it to neighboring pixels. How these pixels should be sampled can vary depending on the quality settings from the user. If an adjacent pixel has a smaller depth value, the occlusion value will be incremented for the current pixel in the fragment shader. An illustration of this can be seen in figure 3. Another advantage that the SSAO method has is its independency of scene complexity. As the number of fragments in the scene always are constant, it will take the same time to calculate the AO for a simple plane as for a scene with millions of polygons. Figure 3: Illustration of different depth values in 1D. 2.3 HBAO Horizon-based Ambient Occlusion is an improvement of the SSAO method. It was released in 2008, presented by Louis Bavoil et al [2]. HBAO uses the angle between the horizon and the vector from an AO point to a point on occluding geometry, to march over all geometry closeby, and thereby achieving the total AO value. This resolves some of the problems from SSAO but the computational cost is also greater. In many real-time applications, such as games, the difference can be hard to spot and it might not be worth the extra computation time. 3 Volume-Based Ambient Occlusion Volume-based ambient occlusion, presented by G. Papaioannou et al[3], utilizes the same principles as when ray casting the stochastic hemisphere, as in equation 3. However, here the rays are marched within a volume representation of the scene. The scene geometry can be voxelized and stored inside a 3D texture, and then conveniently be traversed. As all the data from the scene exists in the texture, the method is view-independent. However, it is possible to only derive the ambient occlusion for the volume data that is visible on the screen. In the implementation presented in this paper we apply a conservative voxelization step which will be described in the following section. For now, assume that we have a volume representation of a scene, as a 3D texture, filled with ones where there is geometry and zeros everywhere else. When the geometry in the scene is rendered, each pixel fragment can be connected to a voxel fragment in the 3D texture. Given from the geometry is also the normal at that position. From here, rays can be marched out through the texture in directions within the hemisphere of the normal. As we march through the texture we try to linearly interpolate the value at each sampling point. If the ray intersects geometry, the ray will be terminated and the occlusion value for the current pixel will increase. This increment is dependent on how many rays that are casted. The final pixel value will be calculated as the difference between a set ambient value and the sum of all occlusion values. 3.1 Pros and Cons One of the advantages with volume-based AO is that, as once the scene has been voxelized and stored in a 3D texture, the rest can be done in a fragment shader. In that sense it is possible to utilize the multi parallel computing power of the GPU, which allows for this to be run in real-time. 4

6 Furthermore, the technique is independent of scene complexity - AO is only calculated for voxel fragments that are visible on screen. Unfortunately there are also some drawbacks. The texture memory on the GPU sets a fairly early limit on the size of the 3D texture. Less available memory means lower resolution of the voxel grid which inevitably leads to voxel shaped artifacts in the AO shadow contours. The method also scales badly with the number of pixel fragments that are being displayed. Imagine that, for every fragment, nine rays are casted over its hemisphere, where each ray reads from the 3D texture at 10 different positions. It will probably hit a voxel containing geometry before it has traversed all these steps, but as a worst case we have 90 texture fetches for each fragment. Finally, the method suffers from difficulties of creating ambient occlusion in areas that are tighter than the length of a single voxel. If occluding geometry is located in the same voxel fragment as for the pixel we currently calculate AO for, this geometry will be ignored. It is necessary to completely exit the own voxel fragment in the first ray step, otherwise, every ray would report detection of geometry, which would result in every fragment becoming black. 3.2 Bilateral smoothing The ambient occlusion pass is rendered to a 2D texture, which is sent into another shader in a separate pass. Here, the AO texture is blurred with a Gaussian filter kernel, in order to remove some of the artifacts that arise due to the finite grid resolution. Though, the blur cannot be applied to the whole texture, as that would eliminate all the details in the scene. Only the AO shadows should be smoothed. Here, a technique is used that is much similar to SSAO. Bilateral filters use more information for the weighting of surrounding pixels than just the distance, to preserve sharp edges. Another radiometric value, such as depth can be used to achieve this effect. The Z-buffer depth values are saved in another texture, so that they can be accessed for all pixels in the AO texture. When fetching the pixel values within the filter kernel, from the AO texture, their depth value is also fetched and compared with the current pixel in the blurring fragment shader. The more a pixel s depth value differs from the center pixel, the less it will be weighted for the final value. This technique is for instance used in the Surface Blur filter in Adobe Photoshop. Figure 4: Example of an application of a bilateral filter. 4 Volume Rasterization Using The Graphics Pipeline Volume rasterization or just voxelization is the method of sampling some function into a three dimensional discrete domain. The function can be any type of 3D discrete or continuous function, e.g, a level set, density function or in our case a surface or more precise, a mesh. Since the domain is discrete it has to be divided into some set of smaller regions which is commonly called voxels. Voxels are the three dimensional equivalence to pixels in an image, i.e, they have a position, coverage (size) and of course a value. A fragment is a pixel intersected by a triangle. The 3D equivalent is a voxel intersected by a triangle, called voxel fragment. In this paper we will always assume that the voxels are uniform in size, i.e, they are in the shape of cubes, see figure 5. It is also important to note that there are at least two different coordinate spaces when dealing with voxel grids. The voxel-space is a local space defined over the number of voxel in each dimension i.e, (i, j, k) [0, 1, 2,..., N ] where N denotes the number of voxels in each axis, ( = {i, j, k}). However, the voxels are also placed in world space, i.e, voxel (i, j, k) actually represents some world space coordinate (x, y, z). In order to perform this mapping, we must decide the world space size of a voxel, v. The mapping can then be performed as follows: 5
 world = 1 v (i, j, k) voxel (4) (i, j, k) voxel = v (x, y, z) world (5) where... is the floor operation. 4.")


7 there are several issues that need to be resolved. We will begin by examining how a simple triangle is rasterized on to the screen. Figure 5: Voxelized version (left) of geometry (right). (x, y, z) world = 1 v (i, j, k) voxel (4) (i, j, k) voxel = v (x, y, z) world (5) where... is the floor operation. 4.1 Surface mesh voxelization Compared to a continuously defined three dimensional function, a surface mesh is quite difficult to rasterize since the surface is not explicitly defined. In this paper we assume that a mesh is a set of triangles and that each triangle is defined by three vertices. The basic idea of rasterizing a mesh, utilizing the graphics pipeline, is to use the hardware rasterizer to generate our voxel positions. First, a cubical frustum is defined in world space which specifies the domain of the volume representation. The trick is then to set the viewport or plane size to the dimensions of the voxel dimensions and orthographically project each triangle. The graphics pipeline rasterizer will then generate fragments that will correspond to voxel fragments. That is, the screen coordinates of the fragments will correspond directly to the voxel-space coordinate. The depth of the fragment can be used to calculate the voxel-space depth by multiplying with the dimensions of the voxel dimensions. The approach is very simple in theory but practically Figure 6: Conservative rasterization (b), compared with normal rasterization (a). source: [4] Two dimensional triangle rasterization can be done with some scanline algorithm which will not be covered in this paper, though the result can be seen in figure 4.1. This figure shows two different types of rasterization. In figure (a), only pixels that have their center inside the triangle are rasterized, which is often called standard rasterization. This is not always good since it underestimates the boundary of the surface. Taken to three dimensions, this could result in holes in the surface when the angle between two triangles is very steep. Conservative rasterization, which has been used in figure (b), can be used to fix this problem. This method rasterizes pixels that are both intersected by the triangle and that are contained. How this can be achieved with the graphics pipeline is covered later. As mentioned, if the triangle is orthographically projected onto an image plane with the same resolution as the grid, the screen coordinate of each fragment will be the same as the voxel-space coordinate. However, in three dimensions the depth is also needed. The depth, d, for any given fragment will be in the range [0, 1] so it has to be converted by multiplying it with the dimension of the grid. The problem is that the when the triangle is projected and rasterized, the area of the triangle is decreased. It is therefore possible that the triangle intersects multiple voxels in depth, but the pipeline only generates a single fragment. In the next section we will see how to modify the standard rasterization pipeline to do conservative 6


8 rasterization, that will alleviate the issues just described. 4.2 Conservative Rasterization As mentioned, conservative rasterization is a technique that rasterizes all fragments that are intersected by a triangle. Conservative rasterization is applied both in screen coordinates and in depth, but these are two separate methods and are applied in different stages of the graphics pipeline. Because of the fact that the rasterization process is not open for modification, the only way to change it is to feed it with a different input. Therefore, to achieve the result depicted in figure 4.1 (b), the triangle must modified before sending it to the raster stage. One way of achieving this is by dilating the triangle, which was proposed in [5]. Their approach for convex polygons like triangles, is to put pixels on each vertex and calculate the convex hull with these pixels included, see figure 7. subsequent fragment shader is to discard these unwanted fragments by checking if the fragment is inside the bounding box or not. It is also needed to compute a conservative depth value, though conservative in the sense of depth is a bit different than in screen space. As mentioned, the problems stems from the projection step. In figures 9, a triangle is projected and rasterized to the image plane. The black points refer to fragments in the image plane and the grid refers to both pixels and voxels. Also, note that the triangle is seen above the projection dimension, i.e, the depth increases when moving away from the projection plane. In figure 9 (a) it is clear that some voxels are missed due to the fact the the triangle intersects several voxels in depth within the same fragment. Our goal is to produce the results in figure 9 (c). Figure 9: Going from (a) to (c) by using the z-min and z-max in (b). Figure 7: Adjusted over-estimated triagle. This can be done by enlarging the triangle to be aligned with the convex hull, shown in blue, and creating a bounding box that bounds the convex hull, shown in orange in figure 8 below. In order to achieve this, we must calculate a minimum and maximum depth value within the fragment, which can be seen in figure 9 (b). However, this requires a known depth change, z, within the fragment, which can be approximated by the partial derivatives of the depth, given by the following equation [6]. z = 1 2 ( z ) x + z y (6) Figure 8: Illustration of the bounding box, which cuts off parts of the over-estimated triangle. The enlarging of the triangle and creation of the bounding box is done in a geometry shader. After the standard rasterization, fragments in the convex hull are created as intended, but also fragments in the enlarged triangle outside the bounding box. The first thing that is done in the The minimum and maximum depth value is then given by z min = z c z and z max = z c + z where z c is the depth in the center of the fragment. Partial derivatives are often built in shader function in several shader languages e.g, the function fwidth(...) in GLSL. The final step in the rasterization process is to write to the 3d texture. At least in OpenGL this has been made possible since the addition of load/store methods in the release of OpenGL
 is a voxel data structure that only stores information in voxels intersected by the surface. It is also a tree structure where each node can have 8 children.")
9 5 Sparse Voxel Octree When a 3D texture is used to represent the scene most of the data will be unused, since the actual surface is just a fraction of the total volume. Sparse voxel octree (SVO) is a voxel data structure that only stores information in voxels intersected by the surface. It is also a tree structure where each node can have 8 children. Each node represent a voxel in space, e.g. the first node represents the whole scene as a voxel and its children nodes represents an 8th of its parents volume etc. The sparse nature of SVO is that each node does not have to have children. The subdivision rule can vary between different applications of the data structure. In our implementation it is based on the voxel fragments. See figure 10 for a visualization of our octree. The actual building of the octree is done in separate passes in a breadth-first manner, i.e. each level of the octree is done in order, which is described in [7]. Pseudo code for the building of our octree is listed below: for each level l for each voxel fragment vf marknode(getvoxelcoordinate(vf)); //Marks node based on voxel //coordinate of vf end for for all nodes n in l if(n.ismarked()) n.createchildren(); end for end for This is more illustrated in figure 11. Our octree implementation is made in C++ but it is parallel in nature. Each voxel fragment can mark nodes independently and each node can be subdivided in parallel. When creating each level one by one, all nodes of the same level get stored close in memory which is good for cache since neighboring accesses are common. 5.2 Pros and cons Figure 10: level. 5.1 Implementation Octree visualization on leaf-node In our implementation the actual building of the octree is only done once at startup. This limits the current implementation to static scenes since moving objects will not be updated in the octree. Dynamic objects should be rasterized separately and stored in a way that it is easy to remove at the end of each frame. A simple but brute force solution could be to voxelize the whole scene, static and dynamic parts, at each frame. The SVO reduces the memory requirement significantly when compared to 3D textures. The 3D texture on the other hand can make use of the fast hardware interpolation. Crassin et al. [8] solved this problem by having each node store the 3x3x3 voxel neighbourhood in a local 3D texture instead of just storing the one voxel. There are problems with this as well, e.g. the most obvious problem is the higher memory requirement. Both the 3D texture and SVO are spatial data structures which makes it easy to find neighbouring scene information. The SVO is more efficient when there is a lot of empty space between surfaces, since it can check large empty areas quickly by traversing the octree. Finding neighbours can also be optimized by storing pointers to neighbours in each node at the cost of more memory. 8

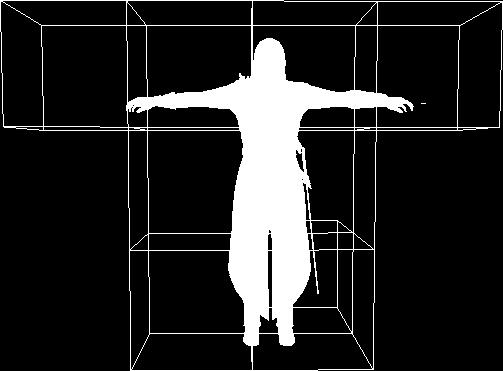
10 Figure 11: The procedure of building the octree. 6 Visualization 6.1 Geometry To clarify, the actual triangle scene is rendered every frame and is lit by using the information in the voxels. This makes the surface quality independent of the quality of the lighting, i.e. the actual scene geometry will never get blocky by grid artifacts. If artifacts from the grid appears it shows up in the lighting. 6.2 Grid - geometry shader The SVO is visualized by sending the octree level to be shown and the positions of the voxels in the SVO to the GPU. The geometry shader then creates wireframe boxes centered on these positions scaled appropriately for the specified octree level. 6.3 Phong shading and AO A scene rendered with ambient occlusion only, can look very appealing. However, when nothing else than ambient occlusion exists, it is impossible to judge its contribution to the final rendering, compared to a scene rendered without AO. Therefore, a basic Phong shader is also implemented and mixed into the result images. The final shading will subtract the occlusion value from the phong shaded pixel intensity instead of a simple ambient intensity. However, the Phong shading can also be turned off completely. different parameters to a GUI and modify these during runtime. Being able to turn ambient occlusion on and off, adjusting the number of cast rays, how far they should reach, and how much the AO should be blurred are some of the parameters that we can change. 7 Results The result of this project is an Ambient Occlusion pass renderer based on volume data. To see the difference between the use of ambient occlusion and having it turned off, a Phong shader is also implemented. We are allowed to load any model into the program and rasterize it according to described method. The Sparse Voxel Octree is done on the CPU and remains there, thus it is not used for the AO render pass, but rather during the visualization of the geometry filled volume data. For this, wireframe cubes are created within a geometry shader, and can be turned on and off, as well as scaled in aspect to octree level, during runtime. We are also able to adjust the parameters for the AO shader, such as number of rays and the amount of blur. The figures below show the result in some different aspects. 6.4 GUI To make it easier to test out different settings for the rendering, we use the AntTweakBar extension for GLFW. This lets the user connect 9
11 (a) Assassin s Creed - Altair: 377,000 triangles. (b) The Sibenik Cathedral: 1,200,000 triangles. Figure 12: Two different renderings with ambient occlusion only. 10


 with")

12 Figure 13: Some different renderings comparing Phong shading only (left) with Phong shading and ambient occlusion combined (right). 11

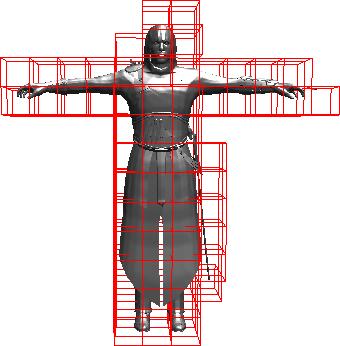
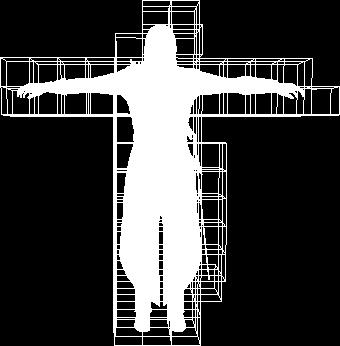
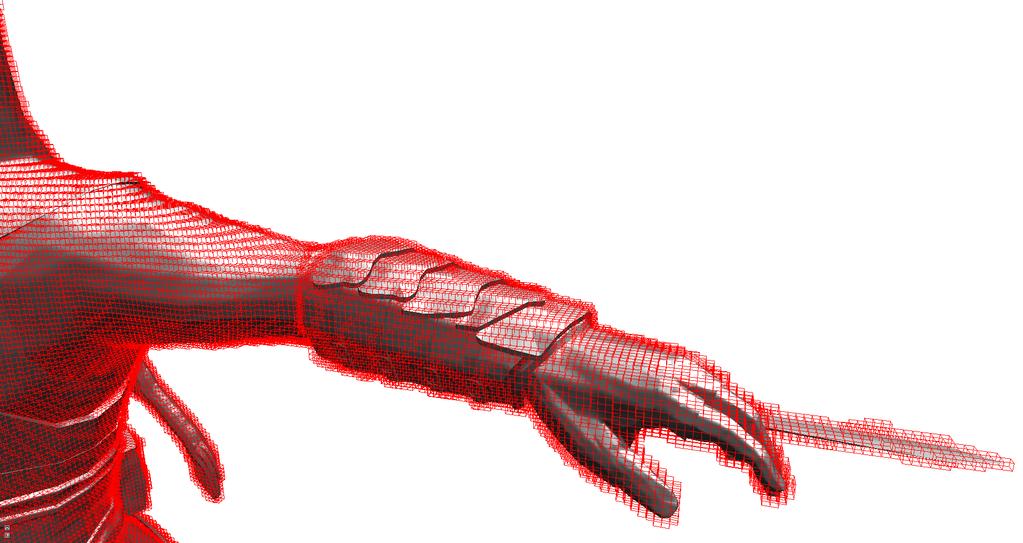

13 Figure 14: Illustration of some different SVO levels. Figure 15: The SVO, visualized at its deepest level. 12

14 8 Conclusion In this paper we have described a volume based ambient occlusion model. This approach utilizes the standard graphics pipeline to rasterize the scene geometry into a three dimensional texture as described in [8], [4] and [6]. We have seen that this method produces visually pleasing results but suffers both from grid artifacts and slow computation time. It is however interesting to have seen that the computing power of today s GPU s can compute ray traced ambient occlusion in real time. We have also seen that the graphics pipeline can effectively be used to voxelize surface meshes. This has been made possible through OpenGL 4.2 s load/store functionality, which makes it possible to both write and read two arbitrary buffers or textures inside a shader program. The major conclusion we make is that volume based ambient occlusion is a feasible approach but much work has to be done to speed up the ray marching step which is the main bottleneck of the method. 9 Future work SVO on the GPU To speed up the ambient occlusion calculations and to save a lot of memory, the Sparse Voxel Octree could be implemented on the GPU. This would imply using the SVO instead of ray marching a 3D texture. This would most easily be done in a compute shader available in OpenGL 4.3. Implement voxel cone tracing Voxel cone tracing [8] is a method that tries to reduce the time to calculate an intensity for a pixel when using rays to gather information. Instead of sending out a lot of rays for each fragment, the idea of voxel cone tracing is to send out fewer rays that approximate the result as good as possible. These fewer rays can be seen as cones with the external point of the cones at the surface.the radius of the cones then determines at what voxel resolution the ray should sample, see figure 16. Since the rays sample lower and lower resolutions while they get further and further away this method gets automatic LOD rendering. The mipmaps are just averages of lower Figure 16: Visualization of voxel cone tracing using mipmapped textures. resolutions which also can be used for blur effects. Voxel cone tracing works very well with ambient occlusion as well. In our implementation each fragment spawns a number of rays that samples a 3D texture. The conversion would be to spawn fewer rays per fragment and sample the appropriate mipmap level instead based on the radius of the cone. The naive way of implementing this would be to use a high resolution 3D texture and its mipmaps. The problem with this method is of course the memory requirement. The more sophisticated way would be to use the sparse voxel octree data structure, described in section 5. A modification to our SVO would be to store scene information in all nodes instead of only the leaf nodes, where each node gets its values from averaging the values of its children [8]. Shooting a ray from a voxel fragment out in the scene would be the same thing as sampling octree nodes closer and closer to the root, which means that the accuracy of the check for occluding geometry becomes lower and lower. This naturally also contributes to smoothing out voxel artifacts in the AO. References [1] M. Mittring, Finding next gen: Cryengine 2, in ACM SIGGRAPH 2007 courses, SIGGRAPH 07, (New York, NY, USA), pp , ACM, [2] L. Bavoil, M. Sainz, and R. Dimitrov, Image-space horizon-based ambient occlusion, in ACM SIGGRAPH 2008 talks, 13
15 SIGGRAPH 08, (New York, NY, USA), pp. 22:1 22:1, ACM, [3] G. Papaioannou, M. Menexi, and C. Papadopoulos, Real-time volume-based ambient occlusion, Visualization and Computer Graphics, IEEE Transactions on, vol. 16, pp , sept.-oct [4] M. Pharr and R. Fernando, GPU Gems 2: Programming Techniques for High-Performance Graphics and General-Purpose Computation (Gpu Gems). Addison-Wesley Professional, [5] H. Nguyen, Gpu gems 3. Addison-Wesley Professional, first ed., [6] L. Zang, W. Chen, D. S Ebert, and Q. Peng, Conservative voxelization, Springer-Verlag, [7] A. Name, Octree-based sparse voxelization using the gpu hardware rasterizer, in OpenGL Insights (P. Cozzi and C. Riccio, eds.), pp , CRC Press, July http: // [8] C. Crassin, F. Neyret, M. Sainz, S. Green, and E. Eisemann, Interactive indirect illumination using voxel cone tracing, Computer Graphics Forum (Proceedings of Pacific Graphics 2011), vol. 30, sep
Screen Space Ambient Occlusion TSBK03: Advanced Game Programming
 Screen Space Ambient Occlusion TSBK03: Advanced Game Programming August Nam-Ki Ek, Oscar Johnson and Ramin Assadi March 5, 2015 This project report discusses our approach of implementing Screen Space Ambient
Screen Space Ambient Occlusion TSBK03: Advanced Game Programming August Nam-Ki Ek, Oscar Johnson and Ramin Assadi March 5, 2015 This project report discusses our approach of implementing Screen Space Ambient
Real-Time Voxelization for Global Illumination
 Lecture 26: Real-Time Voxelization for Global Illumination Visual Computing Systems Voxelization to regular grid Input: scene triangles Output: surface information at each voxel in 3D grid - Simple case:
Lecture 26: Real-Time Voxelization for Global Illumination Visual Computing Systems Voxelization to regular grid Input: scene triangles Output: surface information at each voxel in 3D grid - Simple case:
TSBK03 Screen-Space Ambient Occlusion
 TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
Voxel Cone Tracing and Sparse Voxel Octree for Real-time Global Illumination. Cyril Crassin NVIDIA Research
 Voxel Cone Tracing and Sparse Voxel Octree for Real-time Global Illumination Cyril Crassin NVIDIA Research Global Illumination Indirect effects Important for realistic image synthesis Direct lighting Direct+Indirect
Voxel Cone Tracing and Sparse Voxel Octree for Real-time Global Illumination Cyril Crassin NVIDIA Research Global Illumination Indirect effects Important for realistic image synthesis Direct lighting Direct+Indirect
Advanced Computer Graphics CS 563: Screen Space GI Techniques: Real Time
 Advanced Computer Graphics CS 563: Screen Space GI Techniques: Real Time William DiSanto Computer Science Dept. Worcester Polytechnic Institute (WPI) Overview Deferred Shading Ambient Occlusion Screen
Advanced Computer Graphics CS 563: Screen Space GI Techniques: Real Time William DiSanto Computer Science Dept. Worcester Polytechnic Institute (WPI) Overview Deferred Shading Ambient Occlusion Screen
Octree-Based Sparse Voxelization for Real-Time Global Illumination. Cyril Crassin NVIDIA Research
 Octree-Based Sparse Voxelization for Real-Time Global Illumination Cyril Crassin NVIDIA Research Voxel representations Crane et al. (NVIDIA) 2007 Allard et al. 2010 Christensen and Batali (Pixar) 2004
Octree-Based Sparse Voxelization for Real-Time Global Illumination Cyril Crassin NVIDIA Research Voxel representations Crane et al. (NVIDIA) 2007 Allard et al. 2010 Christensen and Batali (Pixar) 2004
Accelerated Ambient Occlusion Using Spatial Subdivision Structures
 Abstract Ambient Occlusion is a relatively new method that gives global illumination like results. This paper presents a method to accelerate ambient occlusion using the form factor method in Bunnel [2005]
Abstract Ambient Occlusion is a relatively new method that gives global illumination like results. This paper presents a method to accelerate ambient occlusion using the form factor method in Bunnel [2005]
CS354R: Computer Game Technology
 CS354R: Computer Game Technology Real-Time Global Illumination Fall 2018 Global Illumination Mirror s Edge (2008) 2 What is Global Illumination? Scene recreates feel of physically-based lighting models
CS354R: Computer Game Technology Real-Time Global Illumination Fall 2018 Global Illumination Mirror s Edge (2008) 2 What is Global Illumination? Scene recreates feel of physically-based lighting models
CMSC427 Advanced shading getting global illumination by local methods. Credit: slides Prof. Zwicker
 CMSC427 Advanced shading getting global illumination by local methods Credit: slides Prof. Zwicker Topics Shadows Environment maps Reflection mapping Irradiance environment maps Ambient occlusion Reflection
CMSC427 Advanced shading getting global illumination by local methods Credit: slides Prof. Zwicker Topics Shadows Environment maps Reflection mapping Irradiance environment maps Ambient occlusion Reflection
Ambien Occlusion. Lighting: Ambient Light Sources. Lighting: Ambient Light Sources. Summary
 Summary Ambien Occlusion Kadi Bouatouch IRISA Email: kadi@irisa.fr 1. Lighting 2. Definition 3. Computing the ambient occlusion 4. Ambient occlusion fields 5. Dynamic ambient occlusion 1 2 Lighting: Ambient
Summary Ambien Occlusion Kadi Bouatouch IRISA Email: kadi@irisa.fr 1. Lighting 2. Definition 3. Computing the ambient occlusion 4. Ambient occlusion fields 5. Dynamic ambient occlusion 1 2 Lighting: Ambient
Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural
 1 Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural to consider using it in video games too. 2 I hope that
1 Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural to consider using it in video games too. 2 I hope that
Rendering Algorithms: Real-time indirect illumination. Spring 2010 Matthias Zwicker
 Rendering Algorithms: Real-time indirect illumination Spring 2010 Matthias Zwicker Today Real-time indirect illumination Ray tracing vs. Rasterization Screen space techniques Visibility & shadows Instant
Rendering Algorithms: Real-time indirect illumination Spring 2010 Matthias Zwicker Today Real-time indirect illumination Ray tracing vs. Rasterization Screen space techniques Visibility & shadows Instant
Screen Space Ambient Occlusion. Daniel Kvarfordt & Benjamin Lillandt
 Screen Space Ambient Occlusion Daniel Kvarfordt & Benjamin Lillandt Ambient light Same from all directions. Lambertian shading doesn't show form well. Need shadows to see form. Global illumination can
Screen Space Ambient Occlusion Daniel Kvarfordt & Benjamin Lillandt Ambient light Same from all directions. Lambertian shading doesn't show form well. Need shadows to see form. Global illumination can
Soft shadows. Steve Marschner Cornell University CS 569 Spring 2008, 21 February
 Soft shadows Steve Marschner Cornell University CS 569 Spring 2008, 21 February Soft shadows are what we normally see in the real world. If you are near a bare halogen bulb, a stage spotlight, or other
Soft shadows Steve Marschner Cornell University CS 569 Spring 2008, 21 February Soft shadows are what we normally see in the real world. If you are near a bare halogen bulb, a stage spotlight, or other
CPSC GLOBAL ILLUMINATION
 CPSC 314 21 GLOBAL ILLUMINATION Textbook: 20 UGRAD.CS.UBC.CA/~CS314 Mikhail Bessmeltsev ILLUMINATION MODELS/ALGORITHMS Local illumination - Fast Ignore real physics, approximate the look Interaction of
CPSC 314 21 GLOBAL ILLUMINATION Textbook: 20 UGRAD.CS.UBC.CA/~CS314 Mikhail Bessmeltsev ILLUMINATION MODELS/ALGORITHMS Local illumination - Fast Ignore real physics, approximate the look Interaction of
INFOGR Computer Graphics. J. Bikker - April-July Lecture 10: Ground Truth. Welcome!
 INFOGR Computer Graphics J. Bikker - April-July 2015 - Lecture 10: Ground Truth Welcome! Today s Agenda: Limitations of Whitted-style Ray Tracing Monte Carlo Path Tracing INFOGR Lecture 10 Ground Truth
INFOGR Computer Graphics J. Bikker - April-July 2015 - Lecture 10: Ground Truth Welcome! Today s Agenda: Limitations of Whitted-style Ray Tracing Monte Carlo Path Tracing INFOGR Lecture 10 Ground Truth
Chapter 11 Global Illumination. Part 1 Ray Tracing. Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.
 Sections 11.1, 11.2, 11.") Chapter 11 Global Illumination Part 1 Ray Tracing Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.3 CG(U), Chap.11 Part 1:Ray Tracing 1 Can pipeline graphics renders images
Chapter 11 Global Illumination Part 1 Ray Tracing Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.3 CG(U), Chap.11 Part 1:Ray Tracing 1 Can pipeline graphics renders images
Pipeline Operations. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2018 Lecture 11
 Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
Deferred Rendering Due: Wednesday November 15 at 10pm
 CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students)
") TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
Pipeline Operations. CS 4620 Lecture 14
 Pipeline Operations CS 4620 Lecture 14 2014 Steve Marschner 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives
Pipeline Operations CS 4620 Lecture 14 2014 Steve Marschner 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives
Hello, Thanks for the introduction
 Hello, Thanks for the introduction 1 In this paper we suggest an efficient data-structure for precomputed shadows from point light or directional light-sources. Because, in fact, after more than four decades
Hello, Thanks for the introduction 1 In this paper we suggest an efficient data-structure for precomputed shadows from point light or directional light-sources. Because, in fact, after more than four decades
Shadows. COMP 575/770 Spring 2013
 Shadows COMP 575/770 Spring 2013 Shadows in Ray Tracing Shadows are important for realism Basic idea: figure out whether a point on an object is illuminated by a light source Easy for ray tracers Just
Shadows COMP 575/770 Spring 2013 Shadows in Ray Tracing Shadows are important for realism Basic idea: figure out whether a point on an object is illuminated by a light source Easy for ray tracers Just
Ambient Occlusion. Ambient Occlusion (AO) "shadowing of ambient light "darkening of the ambient shading contribution
 shadowing of ambient light darkening of the ambient shading contribution") Slides modified from: Patrick Cozzi University of Pennsylvania CIS 565 - Fall 2013 (AO) "shadowing of ambient light "darkening of the ambient shading contribution "the crevices of the model are realistically
Slides modified from: Patrick Cozzi University of Pennsylvania CIS 565 - Fall 2013 (AO) "shadowing of ambient light "darkening of the ambient shading contribution "the crevices of the model are realistically
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
Parallel Physically Based Path-tracing and Shading Part 3 of 2. CIS565 Fall 2012 University of Pennsylvania by Yining Karl Li
 Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
Pipeline Operations. CS 4620 Lecture 10
 Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Recent Advances in Monte Carlo Offline Rendering
 CS294-13: Special Topics Lecture #6 Advanced Computer Graphics University of California, Berkeley Monday, 21 September 2009 Recent Advances in Monte Carlo Offline Rendering Lecture #6: Monday, 21 September
CS294-13: Special Topics Lecture #6 Advanced Computer Graphics University of California, Berkeley Monday, 21 September 2009 Recent Advances in Monte Carlo Offline Rendering Lecture #6: Monday, 21 September
Applications of Explicit Early-Z Culling
 Applications of Explicit Early-Z Culling Jason L. Mitchell ATI Research Pedro V. Sander ATI Research Introduction In past years, in the SIGGRAPH Real-Time Shading course, we have covered the details of
Applications of Explicit Early-Z Culling Jason L. Mitchell ATI Research Pedro V. Sander ATI Research Introduction In past years, in the SIGGRAPH Real-Time Shading course, we have covered the details of
Dynamic Ambient Occlusion and Indirect Lighting. Michael Bunnell NVIDIA Corporation
 Dynamic Ambient Occlusion and Indirect Lighting Michael Bunnell NVIDIA Corporation Environment Lighting Environment Map + Ambient Occlusion + Indirect Lighting New Radiance Transfer Algorithm Useful for
Dynamic Ambient Occlusion and Indirect Lighting Michael Bunnell NVIDIA Corporation Environment Lighting Environment Map + Ambient Occlusion + Indirect Lighting New Radiance Transfer Algorithm Useful for
COMP 175: Computer Graphics April 11, 2018
 Lecture n+1: Recursive Ray Tracer2: Advanced Techniques and Data Structures COMP 175: Computer Graphics April 11, 2018 1/49 Review } Ray Intersect (Assignment 4): questions / comments? } Review of Recursive
Lecture n+1: Recursive Ray Tracer2: Advanced Techniques and Data Structures COMP 175: Computer Graphics April 11, 2018 1/49 Review } Ray Intersect (Assignment 4): questions / comments? } Review of Recursive
Point Cloud Filtering using Ray Casting by Eric Jensen 2012 The Basic Methodology
 Point Cloud Filtering using Ray Casting by Eric Jensen 01 The Basic Methodology Ray tracing in standard graphics study is a method of following the path of a photon from the light source to the camera,
Point Cloud Filtering using Ray Casting by Eric Jensen 01 The Basic Methodology Ray tracing in standard graphics study is a method of following the path of a photon from the light source to the camera,
Chapter 7 - Light, Materials, Appearance
 Chapter 7 - Light, Materials, Appearance Types of light in nature and in CG Shadows Using lights in CG Illumination models Textures and maps Procedural surface descriptions Literature: E. Angel/D. Shreiner,
Chapter 7 - Light, Materials, Appearance Types of light in nature and in CG Shadows Using lights in CG Illumination models Textures and maps Procedural surface descriptions Literature: E. Angel/D. Shreiner,
Computergrafik. Matthias Zwicker. Herbst 2010
 Computergrafik Matthias Zwicker Universität Bern Herbst 2010 Today Bump mapping Shadows Shadow mapping Shadow mapping in OpenGL Bump mapping Surface detail is often the result of small perturbations in
Computergrafik Matthias Zwicker Universität Bern Herbst 2010 Today Bump mapping Shadows Shadow mapping Shadow mapping in OpenGL Bump mapping Surface detail is often the result of small perturbations in
Recollection. Models Pixels. Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows
 Recollection Models Pixels Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows Can be computed in different stages 1 So far we came to Geometry model 3 Surface
Recollection Models Pixels Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows Can be computed in different stages 1 So far we came to Geometry model 3 Surface
The Traditional Graphics Pipeline
 Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
High-quality Shadows with Improved Paraboloid Mapping
 High-quality Shadows with Improved Paraboloid Mapping Juraj Vanek, Jan Navrátil, Adam Herout, and Pavel Zemčík Brno University of Technology, Faculty of Information Technology, Czech Republic http://www.fit.vutbr.cz
High-quality Shadows with Improved Paraboloid Mapping Juraj Vanek, Jan Navrátil, Adam Herout, and Pavel Zemčík Brno University of Technology, Faculty of Information Technology, Czech Republic http://www.fit.vutbr.cz
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Shadows for Many Lights sounds like it might mean something, but In fact it can mean very different things, that require very different solutions.
 1 2 Shadows for Many Lights sounds like it might mean something, but In fact it can mean very different things, that require very different solutions. 3 We aim for something like the numbers of lights
1 2 Shadows for Many Lights sounds like it might mean something, but In fact it can mean very different things, that require very different solutions. 3 We aim for something like the numbers of lights
Game Technology. Lecture Physically Based Rendering. Dipl-Inform. Robert Konrad Polona Caserman, M.Sc.
 Game Technology Lecture 7 4.12.2017 Physically Based Rendering Dipl-Inform. Robert Konrad Polona Caserman, M.Sc. Prof. Dr.-Ing. Ralf Steinmetz KOM - Multimedia Communications Lab PPT-for-all v.3.4_office2010
Game Technology Lecture 7 4.12.2017 Physically Based Rendering Dipl-Inform. Robert Konrad Polona Caserman, M.Sc. Prof. Dr.-Ing. Ralf Steinmetz KOM - Multimedia Communications Lab PPT-for-all v.3.4_office2010
OpenGl Pipeline. triangles, lines, points, images. Per-vertex ops. Primitive assembly. Texturing. Rasterization. Per-fragment ops.
 OpenGl Pipeline Individual Vertices Transformed Vertices Commands Processor Per-vertex ops Primitive assembly triangles, lines, points, images Primitives Fragments Rasterization Texturing Per-fragment
OpenGl Pipeline Individual Vertices Transformed Vertices Commands Processor Per-vertex ops Primitive assembly triangles, lines, points, images Primitives Fragments Rasterization Texturing Per-fragment
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Sung-Eui Yoon ( 윤성의 )
") CS380: Computer Graphics Ray Tracing Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg/ Class Objectives Understand overall algorithm of recursive ray tracing Ray generations Intersection
CS380: Computer Graphics Ray Tracing Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg/ Class Objectives Understand overall algorithm of recursive ray tracing Ray generations Intersection
Global Illumination CS334. Daniel G. Aliaga Department of Computer Science Purdue University
 Global Illumination CS334 Daniel G. Aliaga Department of Computer Science Purdue University Recall: Lighting and Shading Light sources Point light Models an omnidirectional light source (e.g., a bulb)
Global Illumination CS334 Daniel G. Aliaga Department of Computer Science Purdue University Recall: Lighting and Shading Light sources Point light Models an omnidirectional light source (e.g., a bulb)
Rasterization Overview
 Rendering Overview The process of generating an image given a virtual camera objects light sources Various techniques rasterization (topic of this course) raytracing (topic of the course Advanced Computer
Rendering Overview The process of generating an image given a virtual camera objects light sources Various techniques rasterization (topic of this course) raytracing (topic of the course Advanced Computer
Direct Rendering of Trimmed NURBS Surfaces
 Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Advanced Ray Tracing
 Advanced Ray Tracing Thanks to Fredo Durand and Barb Cutler The Ray Tree Ni surface normal Ri reflected ray Li shadow ray Ti transmitted (refracted) ray 51 MIT EECS 6.837, Cutler and Durand 1 Ray Tree
Advanced Ray Tracing Thanks to Fredo Durand and Barb Cutler The Ray Tree Ni surface normal Ri reflected ray Li shadow ray Ti transmitted (refracted) ray 51 MIT EECS 6.837, Cutler and Durand 1 Ray Tree
Volume Shadows Tutorial Nuclear / the Lab
 Volume Shadows Tutorial Nuclear / the Lab Introduction As you probably know the most popular rendering technique, when speed is more important than quality (i.e. realtime rendering), is polygon rasterization.
Volume Shadows Tutorial Nuclear / the Lab Introduction As you probably know the most popular rendering technique, when speed is more important than quality (i.e. realtime rendering), is polygon rasterization.
Ray Tracing III. Wen-Chieh (Steve) Lin National Chiao-Tung University
 Lin National Chiao-Tung University") Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
I have a meeting with Peter Lee and Bob Cosgrove on Wednesday to discuss the future of the cluster. Computer Graphics
 Announcements Assignment 4 will be out later today Problem Set 3 is due today or tomorrow by 9am in my mail box (4 th floor NSH) How are the machines working out? I have a meeting with Peter Lee and Bob
Announcements Assignment 4 will be out later today Problem Set 3 is due today or tomorrow by 9am in my mail box (4 th floor NSH) How are the machines working out? I have a meeting with Peter Lee and Bob
Lets assume each object has a defined colour. Hence our illumination model is looks unrealistic.
 Shading Models There are two main types of rendering that we cover, polygon rendering ray tracing Polygon rendering is used to apply illumination models to polygons, whereas ray tracing applies to arbitrary
Shading Models There are two main types of rendering that we cover, polygon rendering ray tracing Polygon rendering is used to apply illumination models to polygons, whereas ray tracing applies to arbitrary
Last Time: Acceleration Data Structures for Ray Tracing. Schedule. Today. Shadows & Light Sources. Shadows
 Last Time: Acceleration Data Structures for Ray Tracing Modeling Transformations Illumination (Shading) Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Scan Conversion
Last Time: Acceleration Data Structures for Ray Tracing Modeling Transformations Illumination (Shading) Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Scan Conversion
Announcements. Written Assignment 2 out (due March 8) Computer Graphics
 Computer Graphics") Announcements Written Assignment 2 out (due March 8) 1 Advanced Ray Tracing (Recursive) Ray Tracing Antialiasing Motion Blur Distribution Ray Tracing Ray Tracing and Radiosity Assumptions Simple shading
Announcements Written Assignment 2 out (due March 8) 1 Advanced Ray Tracing (Recursive) Ray Tracing Antialiasing Motion Blur Distribution Ray Tracing Ray Tracing and Radiosity Assumptions Simple shading
Irradiance Gradients. Media & Occlusions
 Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
Final Project: Real-Time Global Illumination with Radiance Regression Functions
 Volume xx (200y), Number z, pp. 1 5 Final Project: Real-Time Global Illumination with Radiance Regression Functions Fu-Jun Luan Abstract This is a report for machine learning final project, which combines
Volume xx (200y), Number z, pp. 1 5 Final Project: Real-Time Global Illumination with Radiance Regression Functions Fu-Jun Luan Abstract This is a report for machine learning final project, which combines
Computer Graphics. Lecture 13. Global Illumination 1: Ray Tracing and Radiosity. Taku Komura
 Computer Graphics Lecture 13 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Computer Graphics Lecture 13 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
COMP30019 Graphics and Interaction Scan Converting Polygons and Lines
 COMP30019 Graphics and Interaction Scan Converting Polygons and Lines Department of Computer Science and Software Engineering The Lecture outline Introduction Scan conversion Scan-line algorithm Edge coherence
COMP30019 Graphics and Interaction Scan Converting Polygons and Lines Department of Computer Science and Software Engineering The Lecture outline Introduction Scan conversion Scan-line algorithm Edge coherence
TDA361/DIT220 Computer Graphics, January 15 th 2016
 TDA361/DIT220 Computer Graphics, January 15 th 2016 EXAM (Same exam for both CTH- and GU students) Friday January 15 th, 2016, 8.30 12.30 Examiner Ulf Assarsson, tel. 0701-738535 Permitted Technical Aids
TDA361/DIT220 Computer Graphics, January 15 th 2016 EXAM (Same exam for both CTH- and GU students) Friday January 15 th, 2016, 8.30 12.30 Examiner Ulf Assarsson, tel. 0701-738535 Permitted Technical Aids
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Point based Rendering
 Point based Rendering CS535 Daniel Aliaga Current Standards Traditionally, graphics has worked with triangles as the rendering primitive Triangles are really just the lowest common denominator for surfaces
Point based Rendering CS535 Daniel Aliaga Current Standards Traditionally, graphics has worked with triangles as the rendering primitive Triangles are really just the lowest common denominator for surfaces
Computer Graphics. Shadows
 Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
Chapter 17: The Truth about Normals
 Chapter 17: The Truth about Normals What are Normals? When I first started with Blender I read about normals everywhere, but all I knew about them was: If there are weird black spots on your object, go
Chapter 17: The Truth about Normals What are Normals? When I first started with Blender I read about normals everywhere, but all I knew about them was: If there are weird black spots on your object, go
Photorealistic 3D Rendering for VW in Mobile Devices
 Abstract University of Arkansas CSCE Department Advanced Virtual Worlds Spring 2013 Photorealistic 3D Rendering for VW in Mobile Devices Rafael Aroxa In the past few years, the demand for high performance
Abstract University of Arkansas CSCE Department Advanced Virtual Worlds Spring 2013 Photorealistic 3D Rendering for VW in Mobile Devices Rafael Aroxa In the past few years, the demand for high performance
For Intuition about Scene Lighting. Today. Limitations of Planar Shadows. Cast Shadows on Planar Surfaces. Shadow/View Duality.
 Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Enabling immersive gaming experiences Intro to Ray Tracing
 Enabling immersive gaming experiences Intro to Ray Tracing Overview What is Ray Tracing? Why Ray Tracing? PowerVR Wizard Architecture Example Content Unity Hybrid Rendering Demonstration 3 What is Ray
Enabling immersive gaming experiences Intro to Ray Tracing Overview What is Ray Tracing? Why Ray Tracing? PowerVR Wizard Architecture Example Content Unity Hybrid Rendering Demonstration 3 What is Ray
Last Time. Why are Shadows Important? Today. Graphics Pipeline. Clipping. Rasterization. Why are Shadows Important?
 Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Interpolation using scanline algorithm
 Interpolation using scanline algorithm Idea: Exploit knowledge about already computed color values. Traverse projected triangle top-down using scanline. Compute start and end color value of each pixel
Interpolation using scanline algorithm Idea: Exploit knowledge about already computed color values. Traverse projected triangle top-down using scanline. Compute start and end color value of each pixel
Interactive Indirect Illumination Using Voxel Cone Tracing
 Interactive Indirect Illumination Using Voxel Cone Tracing Andreas Heider Technische Universität München heidera@in.tum.de Abstract Plausible illumination is crucial for rendering realistic images, but
Interactive Indirect Illumination Using Voxel Cone Tracing Andreas Heider Technische Universität München heidera@in.tum.de Abstract Plausible illumination is crucial for rendering realistic images, but
Enhancing Traditional Rasterization Graphics with Ray Tracing. March 2015
 Enhancing Traditional Rasterization Graphics with Ray Tracing March 2015 Introductions James Rumble Developer Technology Engineer Ray Tracing Support Justin DeCell Software Design Engineer Ray Tracing
Enhancing Traditional Rasterization Graphics with Ray Tracing March 2015 Introductions James Rumble Developer Technology Engineer Ray Tracing Support Justin DeCell Software Design Engineer Ray Tracing
Global Rendering. Ingela Nyström 1. Effects needed for realism. The Rendering Equation. Local vs global rendering. Light-material interaction
 Effects needed for realism Global Rendering Computer Graphics 1, Fall 2005 Lecture 7 4th ed.: Ch 6.10, 12.1-12.5 Shadows Reflections (Mirrors) Transparency Interreflections Detail (Textures etc.) Complex
Effects needed for realism Global Rendering Computer Graphics 1, Fall 2005 Lecture 7 4th ed.: Ch 6.10, 12.1-12.5 Shadows Reflections (Mirrors) Transparency Interreflections Detail (Textures etc.) Complex
After the release of Maxwell in September last year, a number of press articles appeared that describe VXGI simply as a technology to improve
 After the release of Maxwell in September last year, a number of press articles appeared that describe VXGI simply as a technology to improve lighting in games. While that is certainly true, it doesn t
After the release of Maxwell in September last year, a number of press articles appeared that describe VXGI simply as a technology to improve lighting in games. While that is certainly true, it doesn t
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
Reading. 18. Projections and Z-buffers. Required: Watt, Section , 6.3, 6.6 (esp. intro and subsections 1, 4, and 8 10), Further reading:
, Further reading:") Reading Required: Watt, Section 5.2.2 5.2.4, 6.3, 6.6 (esp. intro and subsections 1, 4, and 8 10), Further reading: 18. Projections and Z-buffers Foley, et al, Chapter 5.6 and Chapter 6 David F. Rogers
Reading Required: Watt, Section 5.2.2 5.2.4, 6.3, 6.6 (esp. intro and subsections 1, 4, and 8 10), Further reading: 18. Projections and Z-buffers Foley, et al, Chapter 5.6 and Chapter 6 David F. Rogers
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
Real-Time Shadows. Last Time? Textures can Alias. Schedule. Questions? Quiz 1: Tuesday October 26 th, in class (1 week from today!
 Last Time? Real-Time Shadows Perspective-Correct Interpolation Texture Coordinates Procedural Solid Textures Other Mapping Bump Displacement Environment Lighting Textures can Alias Aliasing is the under-sampling
Last Time? Real-Time Shadows Perspective-Correct Interpolation Texture Coordinates Procedural Solid Textures Other Mapping Bump Displacement Environment Lighting Textures can Alias Aliasing is the under-sampling
MIT Monte-Carlo Ray Tracing. MIT EECS 6.837, Cutler and Durand 1
 MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
Graphics and Interaction Rendering pipeline & object modelling
 433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
CS451Real-time Rendering Pipeline
 1 CS451Real-time Rendering Pipeline JYH-MING LIEN DEPARTMENT OF COMPUTER SCIENCE GEORGE MASON UNIVERSITY Based on Tomas Akenine-Möller s lecture note You say that you render a 3D 2 scene, but what does
1 CS451Real-time Rendering Pipeline JYH-MING LIEN DEPARTMENT OF COMPUTER SCIENCE GEORGE MASON UNIVERSITY Based on Tomas Akenine-Möller s lecture note You say that you render a 3D 2 scene, but what does
Schedule. MIT Monte-Carlo Ray Tracing. Radiosity. Review of last week? Limitations of radiosity. Radiosity
 Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
Spatial Data Structures
 CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CHAPTER 1 Graphics Systems and Models 3
 ?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
Advanced Ambient Occlusion Methods for Modern Games
 Advanced Ambient Occlusion Methods for Modern Games Andrei Tatarinov, Senior Developer Technology Engineer Alexey Panteleev, Senior Developer Technology Engineer Outline What is AO and why is it SS? Is
Advanced Ambient Occlusion Methods for Modern Games Andrei Tatarinov, Senior Developer Technology Engineer Alexey Panteleev, Senior Developer Technology Engineer Outline What is AO and why is it SS? Is
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Real-Time Shadows. Computer Graphics. MIT EECS Durand 1
 Real-Time Shadows Computer Graphics MIT EECS 6.837 Durand 1 Why are Shadows Important? Depth cue Scene Lighting Realism Contact points 2 Shadows as a Depth Cue source unknown. All rights reserved. This
Real-Time Shadows Computer Graphics MIT EECS 6.837 Durand 1 Why are Shadows Important? Depth cue Scene Lighting Realism Contact points 2 Shadows as a Depth Cue source unknown. All rights reserved. This
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
Spatial Data Structures and Speed-Up Techniques. Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology
 Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
CS580: Ray Tracing. Sung-Eui Yoon ( 윤성의 ) Course URL:
 Course URL:") CS580: Ray Tracing Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/gcg/ Recursive Ray Casting Gained popularity in when Turner Whitted (1980) recognized that recursive ray casting could
CS580: Ray Tracing Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/gcg/ Recursive Ray Casting Gained popularity in when Turner Whitted (1980) recognized that recursive ray casting could
Computer Graphics. Lecture 10. Global Illumination 1: Ray Tracing and Radiosity. Taku Komura 12/03/15
 Computer Graphics Lecture 10 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Computer Graphics Lecture 10 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
This work is about a new method for generating diffusion curve style images. Although this topic is dealing with non-photorealistic rendering, as you
 This work is about a new method for generating diffusion curve style images. Although this topic is dealing with non-photorealistic rendering, as you will see our underlying solution is based on two-dimensional
This work is about a new method for generating diffusion curve style images. Although this topic is dealing with non-photorealistic rendering, as you will see our underlying solution is based on two-dimensional
Today. Anti-aliasing Surface Parametrization Soft Shadows Global Illumination. Exercise 2. Path Tracing Radiosity
 Today Anti-aliasing Surface Parametrization Soft Shadows Global Illumination Path Tracing Radiosity Exercise 2 Sampling Ray Casting is a form of discrete sampling. Rendered Image: Sampling of the ground
Today Anti-aliasing Surface Parametrization Soft Shadows Global Illumination Path Tracing Radiosity Exercise 2 Sampling Ray Casting is a form of discrete sampling. Rendered Image: Sampling of the ground
CEng 477 Introduction to Computer Graphics Fall 2007
 Visible Surface Detection CEng 477 Introduction to Computer Graphics Fall 2007 Visible Surface Detection Visible surface detection or hidden surface removal. Realistic scenes: closer objects occludes the
Visible Surface Detection CEng 477 Introduction to Computer Graphics Fall 2007 Visible Surface Detection Visible surface detection or hidden surface removal. Realistic scenes: closer objects occludes the
Topic 12: Texture Mapping. Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping
 Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Interactive Methods in Scientific Visualization
 Interactive Methods in Scientific Visualization GPU Volume Raycasting Christof Rezk-Salama University of Siegen, Germany Volume Rendering in a Nutshell Image Plane Eye Data Set Back-to-front iteration
Interactive Methods in Scientific Visualization GPU Volume Raycasting Christof Rezk-Salama University of Siegen, Germany Volume Rendering in a Nutshell Image Plane Eye Data Set Back-to-front iteration
DEFERRED RENDERING STEFAN MÜLLER ARISONA, ETH ZURICH SMA/
 DEFERRED RENDERING STEFAN MÜLLER ARISONA, ETH ZURICH SMA/2013-11-04 DEFERRED RENDERING? CONTENTS 1. The traditional approach: Forward rendering 2. Deferred rendering (DR) overview 3. Example uses of DR:
DEFERRED RENDERING STEFAN MÜLLER ARISONA, ETH ZURICH SMA/2013-11-04 DEFERRED RENDERING? CONTENTS 1. The traditional approach: Forward rendering 2. Deferred rendering (DR) overview 3. Example uses of DR:
Today. Global illumination. Shading. Interactive applications. Rendering pipeline. Computergrafik. Shading Introduction Local shading models
 Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and
 1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the
1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the