DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
|
|
|
- Dulcie Rogers
- 5 years ago
- Views:
Transcription
1 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8,
2 Image formation Goal: Model the image formation process Image acquisition Perspective projection properties approximations Homogeneous coordinates Sampling Image warping 2

3 Image formation Image formation is a physical process that captures scene illumination through a lens system and relates the measured energy to a signal. 3
.")
4 Basic concepts Irradiance E: Amount of light falling on a surface, in power per unit area (watts per square meter). If surface tilts away from light, same amount of light strikes bigger surface (foreshortening less irradiance). Radiance L: Amount of light radiated from a surface, in power per unit area per unit solid angle. Informally Brightness. Image irradiance E is proportional to scene radiance 4
: sun opposite")

5 Light source examples Left: Forest image (left): sun behind observer, (right): sun opposite observer Right: Field with rough surface (left): sun behind observer, (right): sun opposite observer. 5

6 Digital imaging Image irradiance E area exposure time Intensity Sensors read the light intensity that may be filtered through color filters, and digital memory devices store the digital image information either as RGB color space or as raw data. An image is discretized: sampled on a discrete 2D grid array of color values. 6
7 Imaging acqusition - From world point to pixel World points are projected onto a camera sensor chip. Camera sensors sample the irradiance to compute energy values. Positions in camera coordinates (in mm) are converted to image coordinates (in pixels) based on the intrinsic parameters of the camera: - size of each sensor element, - aspect ratio of the sensor (xsize/ysize), - number of sensor elements in total, - image center of sensor chip relative to the lens system. 7
8 Steps in a typical image processing system Image acquisition: capturing visual data by a vision sensor Discretization/digitalization - Quantization - Compression: Convert data into discrete form; compress for efficient storage/transmission Image enhancement: Improving image quality (low contrast, blur noise) Image segmentation: Partition image into objects or constituent parts. Feature detection: Extracting pertinent features from an image that are important for differentiating one class of objects from another. Image representation: Assigning labels to an object based on information provided by descriptors. Image interpretation: Assigning meaning to image information. 8

9 Pinhole camera or Camera Obscura 9
10 Pinhole camera and perspective projection A mapping from a three dimensionsal (3D) world onto a two dimensional (2D) plane in the previous example is called perspective projection. A pinhole camera is the simplest imaging device which captures the geometry of perspective projection. Rays of light enter the camera through an infinitesimally small aperture. The intersection of light rays with the image plane form the image of the object. 10
11 Perspective projection 11
12 Pinhole camera - Perspective geometry Y optical center X image plane Z optical axis p=(x,y,f) image coordinates P=(X,Y,Z) world coordinates focal length The image plane is usually modeled in front of the optical center. The coordinate systems in the world and in the image domain are parallel. The optical axis is image plane. 12

13 Lenses Purpose: gather light from from larger opening (aperture) Problem: only light rays from points on the focal plane intersect the same point on the image plane Result: blurring in-front or behind the focal plane Focal depth: the range of distances with acceptable blurring 13
14 Imaging geometry - Basic camera models Perspective projection (general camera model) All visual rays converge to a common point - the focal point Orthographic projection (approximation: distant objects, center of view) All visual rays are perpendicular to the image plane Image Image focal point Perspective projection Orthographic projection 14
15 Projection equations Perspective mapping Orthographic projection f Z y x f = X Z, x = X, y f = Y Z y = Y Y Scaled orthography - Z 0 constant (representative depth) x f = X Z 0, y f = Y Z 0 15
16 Perspective transformation A perspective transformation has three components: - Rotation - from world to camera coordinate system - Translation - from world to camera coordinate system - Perspective projection - from camera to image coordinates Basic properties which are preserved: - lines project to lines, - collinear features remain collinear, - tangencies, - intersections. 16
17 Perspective transformation (cont) parallel lines e vanishing point image camera centre Each set of parallel lines meet at a different vanishing point - vanishing point associated to this direction. Sets of parallel lines on the same plane lead to collinear vanishing points - the line is called the horizon for that plane. 17
18 Homogeneous coordinates Model points (X,Y,Z) in R 3 world by (kx,ky,kz,k) where k is arbitrary 0, and points (x,y) in R 2 image domain by (cx,cy,c) where c is arbitrary 0. Equivalence relation: (k 1 X,k 1 Y,k 1 Z,k 1 ) is same as (k 2 X,k 2 Y,k 2 Z,k 2 ). Homogeneous coordinates imply that we regard all points on a ray (cx,cy,c) as equivalent (if we only know the image projection, we do not know the depth). Possible to represent points in infinity with homogreneous coordinates (X,Y, Z, 0) - intersections of parallel lines. 18
19 Computing vanishing points 19
20 Homogeneous coordinates (cont) In homogeneous coordinates the projection equations can be written cx cy = f kx 0 f 0 0 ky kz = f kx f ky c kz k Image coordinates obtained by normalizing the third component to one (divide by c = kz). x = xc c = f kx kz = f X Z, y = yc c = f ky kz = f Y Z 20
21 Transformations in homogeneous coordinates Translation X Y Z X Y Z + X Y Z X X X Y Z Y Y Z Z Scaling X S X X Y Z 0 S Y 0 0 Y 0 0 S Z 0 Z
22 Transformations in homogeneous coordinates II Rotation around the Z axis X Y Z 1 cosθ sinθ 0 0 sinθ cosθ X Y Z 1 Mirroring in the XY plane X Y Z X Y Z 1 22
23 Transformations in homogeneous coordinates III Common case: Rigid body transformations (Euclidean) X Y R X Y + X Y Z Z Z where R is a rotation matrix (R 1 = R T ) is written X X Y Z = R Y Z X Y Z 1 23
24 Perspective projection - Extrinsic parameters Consider world coordinates (X,Y,Z,1) expressed in a coordinate system not aligned with the camera coordinate system X X X X Y Z = R Y Y Z Z = A Y Z Perspective projection (more general later) c x y = f X 0 f 0 0 Y = PA Z 1 X Y Z 1 = M X Y Z 1 24
25 Intrinsic camera parameters Due to imperfect placement of the camera chip relative to the lens system, there is always a small relative rotation and shift of center position. 25
26 A more general projection matrix allows: Intrinsic camera parameters Image coordinates with an offset origin Non-square pixels Skewed coordinate axes Five variables below are known as the camera s intrinsic parameters K = f u γ u 0 0 f v v , P = ( K 0 ) = f u γ u f v v Most important is the focal length ( f u, f v ). Normally, f u and f v are assumed equal and the parameters γ, u o and v o close to zero. 26

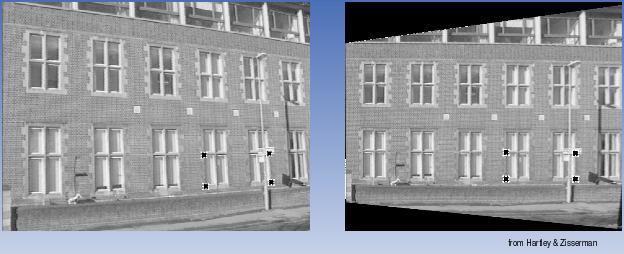
27 Example: Perspective mapping 27

28 Example: Perspective mapping in stereo 28

29 Mosaicing 29
30 Exercise Assume you have a point at (3m, 2m,8m) with respect to the cameras coordinate system. What is the image coordinates, if the image has a size (w,h) = (640,480) and origin in the upper-left corner, and the focal length is f = 480? 30
31 Exercise Assume you have a point at (3m, 2m,8m) with respect to the cameras coordinate system. What is the image coordinates, if the image has a size (w,h) = (640,480) and origin in the upper-left corner, and the focal length is f = 480? Answer: x = f X Z + w 2 = (480 3/ /2) = 500 y = f Y Z + h 2 = ( 480 2/ /2) =

32 Approximation: affine camera 32
33 Approximation: affine camera A linear approximation of perspective projection x y = m X 11 m 12 m 13 m 14 m 21 m 22 m 23 m 24 Y Z Basic properties linear transformation (no need to divide at the end) parallel lines in 3D mapped to parallel lines in 2D Angles are not preserved! 33


34 Planar Affine Transformation Original Flipped x-size Shifted and scaled Sheared 34
35 Summary of models Projective (11 degrees of freedom): M = m 11 m 12 m 13 m 14 m 21 m 22 m 23 m 24 m 31 m 32 m 33 m 34 Affine (8 degrees of freedom): M = m 11 m 12 m 13 m 14 m 21 m 22 m 23 m Scaled orthographic (6 degrees of freedom): M = r 11 r 12 r 13 X r 21 r 22 r 23 Y Z 0 Orthographic (5 degrees of freedom): M = r 11 r 12 r 13 X r 21 r 22 r 23 Y All these are just approximations, since they all assume a pin-hole, which is supposed to be infinitesimally small. 35

36 Sampling and quantization Sample the continuous signal at a finite set of points and quantize the registered values into a finite number of levels. Sampling distances x, y and t determine how rapid spatial and temporal variations can be captured. 36
37 Sampling and quantization Sampling due to limited spatial and temporal resolution. Quantization due to limited intensity resolution. 37

38 Factors that affect quality Quantization: Assigning, usually integer, values to pixels (sampling an amplitude of a function). Quantization error: Difference between the real value and assigned one. Saturation: When the physical value moves outside the allocated range, then it is represented by the end of range value. 38

39 Different image resolutions 39

40 Different number of bits per pixel 40
, v = v(x,y).")
41 Image warping Resample image f (x,y) to get a new image g(u,v), using a coordinate transformation: u = u(x,y), v = v(x,y). Examples of transformations: 41
42 Image Warping For each grid point in (u,v) domain compute corresponding (x,y) values. Note: transformation is inverted to avoid holes in result. Create g(u,v) by sampling from f (x,y) either by: Nearest neighbour look-up (noisy result) Bilinear interpolation (blurry result) f (x + s,y +t) = (1 t) ((1 s) f (x,y) + s f (x + 1,y)) + + t ((1 s) f (x,y + 1) + s f (x + 1,y + 1)) 42

43 Nearest Neighbor vs. Bilinear Interpolation 43
44 Summary of good questions What parameters affects the quality in the acquisition process? What is a pinhole camera model? What is the difference between intrinsic and extrinsic camera parameters? How does a 3D point get projected to a pixel with a perspective projection? What are homogeneous coordinates and what are they good for? What is a vanishing point and how do you find it? What is an affine camera model? What is sampling and quantization? 44
45 Readings Gonzalez and Woods: Chapter 2 Szeliski: Chapters 2.1 and
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
EXAM SOLUTIONS. Computer Vision Course 2D1420 Thursday, 11 th of march 2003,
 Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Robotics - Projective Geometry and Camera model. Matteo Pirotta
 Robotics - Projective Geometry and Camera model Matteo Pirotta pirotta@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano 14 March 2013 Inspired from Simone
Robotics - Projective Geometry and Camera model Matteo Pirotta pirotta@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano 14 March 2013 Inspired from Simone
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Viewing. Reading: Angel Ch.5
 Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Projective geometry for Computer Vision
 Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Perspective Projection [2 pts]
![Perspective Projection [2 pts]](/thumbs/77/75160998.jpg "Perspective Projection [2 pts]") Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the
 Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision 0
 CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
3D Viewing. CMPT 361 Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
Computer Vision Projective Geometry and Calibration
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Midterm Exam Solutions
 Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
COS429: COMPUTER VISON CAMERAS AND PROJECTIONS (2 lectures)
") COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
Models and The Viewing Pipeline. Jian Huang CS456
 Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
How to achieve this goal? (1) Cameras
 Cameras") How to achieve this goal? (1) Cameras History, progression and comparisons of different Cameras and optics. Geometry, Linear Algebra Images Image from Chris Jaynes, U. Kentucky Discrete vs. Continuous
How to achieve this goal? (1) Cameras History, progression and comparisons of different Cameras and optics. Geometry, Linear Algebra Images Image from Chris Jaynes, U. Kentucky Discrete vs. Continuous
COMP30019 Graphics and Interaction Perspective Geometry
 COMP30019 Graphics and Interaction Perspective Geometry Department of Computing and Information Systems The Lecture outline Introduction to perspective geometry Perspective Geometry Virtual camera Centre
COMP30019 Graphics and Interaction Perspective Geometry Department of Computing and Information Systems The Lecture outline Introduction to perspective geometry Perspective Geometry Virtual camera Centre
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera model and calibration
 and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
3D Viewing. Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
Representing the World
 Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
Computer Vision I Name : CSE 252A, Fall 2012 Student ID : David Kriegman Assignment #1. (Due date: 10/23/2012) x P. = z
 x P. = z") Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Viewing. Part II (The Synthetic Camera) CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31
 CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31") Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene
Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Announcements. Image Formation: Outline. Homogenous coordinates. Image Formation and Cameras (cont.)
") Announcements Image Formation and Cameras (cont.) HW1 due, InitialProject topics due today CSE 190 Lecture 6 Image Formation: Outline Factors in producing images Projection Perspective Vanishing points
Announcements Image Formation and Cameras (cont.) HW1 due, InitialProject topics due today CSE 190 Lecture 6 Image Formation: Outline Factors in producing images Projection Perspective Vanishing points
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25