Object Recognition II
|
|
|
- Lester Goodwin
- 5 years ago
- Views:
Transcription
1 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1
2 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based Convolutional Networks (R-CNNs) 2






3 Image classification K classes Task: assign correct class label to the whole image Digit classification (MNIST) Object recognition (Caltech-101) 3



4 Classification vs. Detection Dog Dog Dog 4

5 Problem formulation { airplane, bird, motorbike, person, sofa } person motorbike Input Desired output 5
6 Evaluating a detector Test image (previously unseen)
7 First detection person detector predictions
8 Second detection person detector predictions
9 Third detection person detector predictions

10 Compare to ground truth person detector predictions ground truth person boxes
11 Sort by confidence true positive (high overlap) X X X false positive (no overlap, low overlap, or duplicate)
12 Evaluation metric X X X t ppppppppppp = #tttt ppppppppppp #tttt ppppppppppp + #fffff ppppppppppp + X rrrrrrrr = #tttt ppppppppppp #gggggg ttttt ooooooo
 0% is worst 100% is best")
13 Evaluation metric X X X Average Precision (AP) 0% is worst 100% is best mean AP over classes (map)
14 Pedestrians Histograms of Oriented Gradients for Human Detection, Dalal and Triggs, CVPR 2005 AP ~77% More sophisticated methods: AP ~90% (a) average gradient image over training examples (b) each pixel shows max positive SVM weight in the block centered on that pixel (c) same as (b) for negative SVM weights (d) test image (e) its R-HOG descriptor (f) R-HOG descriptor weighted by positive SVM weights (g) R-HOG descriptor weighted by negative SVM weights 14
15 Overview of HOG Method 1. Compute gradients in the region to be described 2. Put them in bins according to orientation 3. Group the cells into large blocks 4. Normalize each block 5. Train classifiers to decide if these are parts of a human 15
16 Details Gradients [-1 0 1] and [-1 0 1] T were good enough filters. Cell Histograms Each pixel within the cell casts a weighted vote for an orientation-based histogram channel based on the values found in the gradient computation. (9 channels worked) Blocks Group the cells together into larger blocks, either R-HOG blocks (rectangular) or C-HOG blocks (circular). 16
17 More Details Block Normalization They tried 4 different kinds of normalization. L1-norm sqrt of L1-norm L2 norm L2-norm followed by clipping If you think of the block as a vector v, then the normalized block is v/norm(v) 17
18 Example: Dalal-Triggs pedestrian detector 1. Extract fixed-sized (64x128 pixel) window at each position and scale 2. Compute HOG (histogram of gradient) features within each window 3. Score the window with a linear SVM classifier 4. Perform non-maxima suppression to remove overlapping detections with lower scores 18 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
19 Slides by Pete Barnum 19 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05

20 Outperforms centered diagonal uncentered cubic-corrected Sobel Slides by Pete Barnum 20 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
21 Histogram of gradient orientations Orientation: 9 bins (for unsigned angles) Histograms in 8x8 pixel cells Votes weighted by magnitude Bilinear interpolation between cells Slides by Pete Barnum 21 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
22 Normalize with respect to surrounding cells Slides by Pete Barnum 22 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05
23 # orientations X= # features = 15 x 7 x 9 x 4 = 3780 # cells # normalizations by neighboring cells Slides by Pete Barnum 23 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05






24 Training set 24

25 pos w neg w Slides by Pete Barnum 25 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05

26 pedestrian Slides by Pete Barnum 26 Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05

27 Detection examples 27

28 30
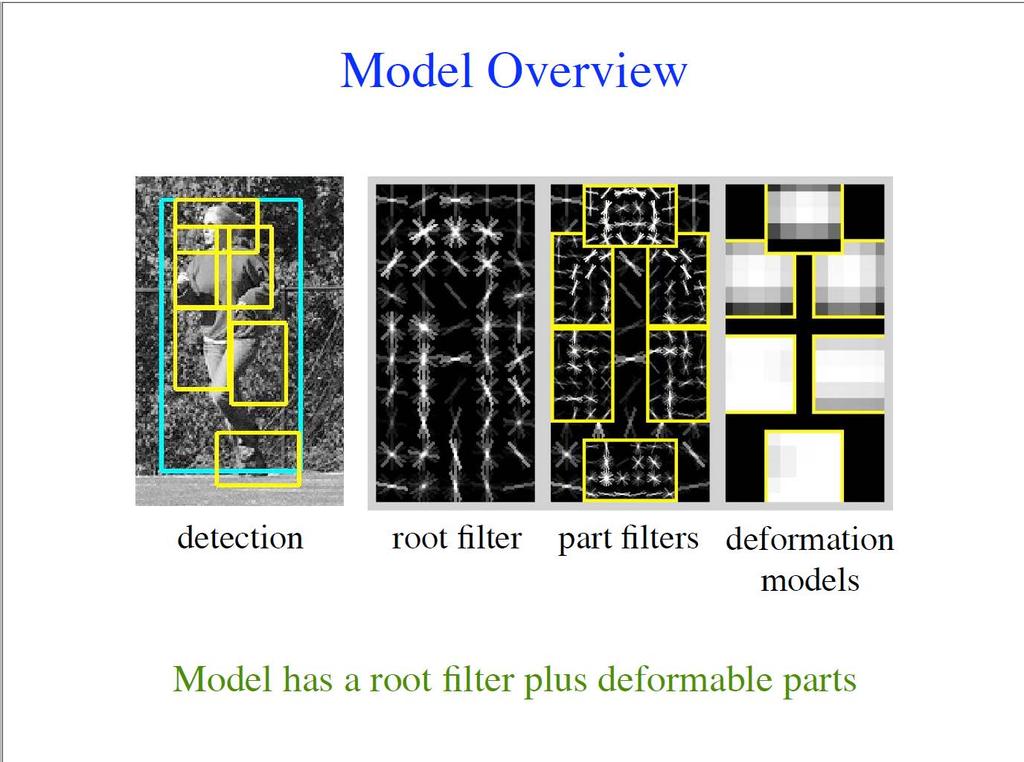
29 Deformable Parts Model Takes the idea a little further Instead of one rigid HOG model, we have multiple HOG models in a spatial arrangement One root part to find first and multiple other parts in a tree structure. 31

30 The Idea Articulated parts model Object is configuration of parts Each part is detectable 32 Images from Felzenszwalb

31 Deformable objects Images from Caltech Slide Credit: Duan Tran

32 Deformable objects Images from D. Ramanan s dataset 34 Slide Credit: Duan Tran
33 How to model spatial relations? Tree-shaped model 35
34 36


35 Hybrid template/parts model Detections Template Visualization 37 Felzenszwalb et al. 2008

36 Pictorial Structures Model Appearance likelihood Geometry likelihood 38

37 Results for person matching 39

38 Results for person matching 40

39 41 BMVC 2009
 Lifetime Achievement 1.")


40 2012 State-of-the-art Detector: Deformable Parts Model (DPM) Lifetime Achievement 1. Strong low-level features based on HOG 2. Efficient matching algorithms for deformable part-based models (pictorial structures) 3. Discriminative learning with latent variables (latent SVM) Felzenszwalb 42 et al., 2008, 2010, 2011, 2012



41 Why did gradient-based models work? Average gradient image 43
42 Generic categories Can we detect people, chairs, horses, cars, dogs, buses, bottles, sheep? PASCAL Visual Object Categories (VOC) dataset 44


?")





43 Generic categories Why doesn t this work (as well)? Can we detect people, chairs, horses, cars, dogs, buses, bottles, sheep? PASCAL Visual Object Categories (VOC) dataset 45
44 Quiz time (Back to Girshick) 46
45 Warm up This is an average image of which object class? 47

46 Warm up pedestrian 48
47 A little harder? 49
48 A little harder? Hint: airplane, bicycle, bus, car, cat, chair, cow, dog, dining table 50
")
49 A little harder bicycle (PASCAL) 51
50 A little harder, yet? 52
51 A little harder, yet? Hint: white blob on a green background 53
")
52 A little harder, yet sheep (PASCAL) 54
53 Impossible?? 55
54 Impossible? dog (PASCAL) 56

55 Impossible? dog (PASCAL) Why does the mean look like this? There s no alignment between the examples! How do we combat this? 57
56 PASCAL VOC detection history 70% mean Average Precision (map) 60% 50% 40% 30% 20% 10% 17% DPM 23% DPM, HOG+ BOW 28% DPM, MKL 37% 41% DPM++ DPM++, MKL, Selective Search 41% Selective Search, DPM++, MKL 0% year
57 Part-based models & multiple features (MKL) 70% mean Average Precision (map) 60% 50% 40% 30% 20% 10% 17% DPM 23% DPM, HOG+ BOW 28% DPM, MKL 37% 41% DPM++ DPM++, MKL, Selective Search 41% Selective Search, DPM++, MKL 0% year
58 Kitchen-sink approaches 70% mean Average Precision (map) 60% 50% 40% 30% 20% 10% 17% DPM 23% DPM, HOG+ BOW 28% DPM, MKL increasing complexity & plateau 37% 41% DPM++ DPM++, MKL, Selective Search 41% Selective Search, DPM++, MKL 0% year
59 Region-based Convolutional Networks (R-CNNs) mean Average Precision (map) 70% 60% 50% 40% 30% 20% 10% 17% DPM 23% DPM, HOG+ BOW 28% DPM, MKL 37% 41% DPM++ DPM++, MKL, Selective Search 41% Selective Search, DPM++, MKL 53% R-CNN v1 62% R-CNN v2 0% year [R-CNN. Girshick et al. CVPR 2014]
60 Region-based Convolutional Networks (R-CNNs) 70% mean Average Precision (map) 60% 50% 40% 30% 20% 10% ~1 year ~5 years 0% year [R-CNN. Girshick et al. CVPR 2014]
61 Convolutional Neural Networks Overview 63

 g")
62 Standard Neural Networks Fully connected T x = x 1,, x 784 z j = g(w T j x) g t = e t 64
63 From NNs to Convolutional NNs Local connectivity Shared ( tied ) weights Multiple feature maps Pooling 65
 neighboring blue units 66")
64 Convolutional NNs Local connectivity compare Each green unit is only connected to (3) neighboring blue units 66
65 Convolutional NNs Shared ( tied ) weights w 1 w 2 w 3 w 1 w 2 All green units share the same parameters w Each green unit computes the same function, but with a different input window w 3 67
66 Convolutional NNs Convolution with 1-D filter: [w 3, w 2, w 1 ] w 1 w 2 w 3 All green units share the same parameters w Each green unit computes the same function, but with a different input window 68
67 Convolutional NNs Convolution with 1-D filter: [w 3, w 2, w 1 ] w 1 w 2 w 3 All green units share the same parameters w Each green unit computes the same function, but with a different input window 69
68 Convolutional NNs Convolution with 1-D filter: [w 3, w 2, w 1 ] w 1 w 2 w 3 All green units share the same parameters w Each green unit computes the same function, but with a different input window 70
69 Convolutional NNs Convolution with 1-D filter: [w 3, w 2, w 1 ] All green units share the same parameters w w 1 w 2 w 3 Each green unit computes the same function, but with a different input window 71
70 Convolutional NNs Convolution with 1-D filter: [w 3, w 2, w 1 ] All green units share the same parameters w w 1 Each green unit computes the same function, but with a different input window w 2 w 3 72
71 Convolutional NNs Multiple feature maps ww 1 ww 2 ww 3 All orange units compute the same function but with a different input windows w 1 w 2 w 3 Feature map 1 (array of green units) Orange and green units compute different functions Feature map 2 (array of orange units) 73
72 Convolutional NNs Pooling (max, average) Pooling area: 2 units Pooling stride: 2 units Subsamples feature maps 74

73 2D input Pooling Convolution Image 75
74 1989 Backpropagation applied to handwritten zip code recognition, Lecun et al.,
75 Historical perspective
76 Historical perspective 1980 Hubel and Wiesel 1962 Included basic ingredients of ConvNets, but no supervised learning algorithm 78
77 Supervised learning 1986 Gradient descent training with error backpropagation Early demonstration that error backpropagation can be used for supervised training of neural nets (including ConvNets) 79
78 Supervised learning 1986 T vs. C problem Simple ConvNet 80

79 Practical ConvNets Gradient-Based Learning Applied to Document Recognition, Lecun et al.,
80 Demo demo/mnist.html ConvNetJS by Andrej Karpathy (Ph.D. student at Stanford) Software libraries Caffe (C++, python, matlab) Torch7 (C++, lua) Theano (python) 82
81 The fall of ConvNets The rise of Support Vector Machines (SVMs) Mathematical advantages (theory, convex optimization) Competitive performance on tasks such as digit classification Neural nets became unpopular in the mid 1990s 83

82 The key to SVMs It s all about the features HOG features SVM weights (+) (-) Histograms of Oriented Gradients for Human Detection, Dalal and Triggs, CVPR
83 Core idea of deep learning Input: the raw signal (image, waveform, ) Features: hierarchy of features is learned from the raw input 85
84 If SVMs killed neural nets, how did they come back (in computer vision)? 86
85 What s new since the 1980s? More layers LeNet-3 and LeNet-5 had 3 and 5 learnable layers Current models have ReLU non-linearities (Rectified Linear Unit) g x = max 0, x Gradient doesn t vanish Dropout regularization Fast GPU implementations More data g(x) x 87



86 What else? Object Proposals Sliding window based object detection Image Feature Extraction Classificaiton Iterate over window size, aspect ratio, and location Object proposals Fast execution High recall with low # of candidate boxes Image Object Proposal Feature Extraction Classificaiton 88

87 The number of contours wholly enclosed by a bounding box is indicative of the likelihood of the box containing an object. 89

88 Ross s Own System: Region CNNs

89 Competitive Results

90 Top Regions for Six Object Classes
91 Finale Object recognition has moved rapidly in the last 12 years to becoming very appearance based. The HOG descriptor lead to fast recognition of specific views of generic objects, starting with pedestrians and using SVMs. Deformable parts models extended that to allow more objects with articulated limbs, but still specific views. CNNs have become the method of choice; they learn from huge amounts of data and can learn multiple views of each object class. 93
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
CSE373: Data Structures & Algorithms Lecture 23: Applications. Linda Shapiro Spring 2016
 CSE373: Data Structures & Algorithms Lecture 23: Applications Linda Shapiro Spring 2016 Announcements Spring 2016 CSE373: Data Structures & Algorithms 2 Other Data Structures and Algorithms Quadtrees:
CSE373: Data Structures & Algorithms Lecture 23: Applications Linda Shapiro Spring 2016 Announcements Spring 2016 CSE373: Data Structures & Algorithms 2 Other Data Structures and Algorithms Quadtrees:
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
6. Convolutional Neural Networks
 6. Convolutional Neural Networks CS 519 Deep Learning, Winter 2017 Fuxin Li With materials from Zsolt Kira Quiz coming up Next Thursday (2/2) 20 minutes Topics: Optimization Basic neural networks No Convolutional
6. Convolutional Neural Networks CS 519 Deep Learning, Winter 2017 Fuxin Li With materials from Zsolt Kira Quiz coming up Next Thursday (2/2) 20 minutes Topics: Optimization Basic neural networks No Convolutional
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation. Deepak Pathak, Philipp Krähenbühl and Trevor Darrell
 Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
An Implementation on Histogram of Oriented Gradients for Human Detection
 An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
CS 2750: Machine Learning. Neural Networks. Prof. Adriana Kovashka University of Pittsburgh April 13, 2016
 CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Detection and Localization with Multi-scale Models
 Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Weakly Supervised Object Recognition with Convolutional Neural Networks
 GDR-ISIS, Paris March 20, 2015 Weakly Supervised Object Recognition with Convolutional Neural Networks Ivan Laptev ivan.laptev@inria.fr WILLOW, INRIA/ENS/CNRS, Paris Joint work with: Maxime Oquab Leon
GDR-ISIS, Paris March 20, 2015 Weakly Supervised Object Recognition with Convolutional Neural Networks Ivan Laptev ivan.laptev@inria.fr WILLOW, INRIA/ENS/CNRS, Paris Joint work with: Maxime Oquab Leon
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved.
 c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
CS 1674: Intro to Computer Vision. Neural Networks. Prof. Adriana Kovashka University of Pittsburgh November 16, 2016
 CS 1674: Intro to Computer Vision Neural Networks Prof. Adriana Kovashka University of Pittsburgh November 16, 2016 Announcements Please watch the videos I sent you, if you haven t yet (that s your reading)
CS 1674: Intro to Computer Vision Neural Networks Prof. Adriana Kovashka University of Pittsburgh November 16, 2016 Announcements Please watch the videos I sent you, if you haven t yet (that s your reading)
CPSC340. State-of-the-art Neural Networks. Nando de Freitas November, 2012 University of British Columbia
 CPSC340 State-of-the-art Neural Networks Nando de Freitas November, 2012 University of British Columbia Outline of the lecture This lecture provides an overview of two state-of-the-art neural networks:
CPSC340 State-of-the-art Neural Networks Nando de Freitas November, 2012 University of British Columbia Outline of the lecture This lecture provides an overview of two state-of-the-art neural networks:
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik Presented by Pandian Raju and Jialin Wu Last class SGD for Document
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Human detection based on Sliding Window Approach
 Human detection based on Sliding Window Approach Heidelberg University Institute of Computer Engeneering Seminar: Mobile Human Detection Systems Name: Njieutcheu Tassi Cedrique Rovile Matr.Nr: 3348513
Human detection based on Sliding Window Approach Heidelberg University Institute of Computer Engeneering Seminar: Mobile Human Detection Systems Name: Njieutcheu Tassi Cedrique Rovile Matr.Nr: 3348513
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Machine Learning. Deep Learning. Eric Xing (and Pengtao Xie) , Fall Lecture 8, October 6, Eric CMU,
 , Fall Lecture 8, October 6, Eric CMU,") Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH
 Università degli Studi dell'insubria Varese, Italy LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH Simone Albertini Ignazio Gallo, Angelo Nodari, Marco Vanetti albertini.simone@gmail.com
Università degli Studi dell'insubria Varese, Italy LEARNING OBJECT SEGMENTATION USING A MULTI NETWORK SEGMENT CLASSIFICATION APPROACH Simone Albertini Ignazio Gallo, Angelo Nodari, Marco Vanetti albertini.simone@gmail.com
Project 3 Q&A. Jonathan Krause
 Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Lecture 15: Detecting Objects by Parts
 Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Deep Learning for Object detection & localization
 Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Ranking Figure-Ground Hypotheses for Object Segmentation
 Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
arxiv: v2 [cs.cv] 1 Oct 2014
![arxiv: v2 [cs.cv] 1 Oct 2014](/thumbs/76/73373319.jpg "arxiv: v2 [cs.cv] 1 Oct 2014") Deformable Part Models are Convolutional Neural Networks Tech report Ross Girshick Forrest Iandola Trevor Darrell Jitendra Malik UC Berkeley {rbg,forresti,trevor,malik}@eecsberkeleyedu arxiv:14095403v2
Deformable Part Models are Convolutional Neural Networks Tech report Ross Girshick Forrest Iandola Trevor Darrell Jitendra Malik UC Berkeley {rbg,forresti,trevor,malik}@eecsberkeleyedu arxiv:14095403v2
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
The Pennsylvania State University. The Graduate School. College of Engineering ONLINE LIVESTREAM CAMERA CALIBRATION FROM CROWD SCENE VIDEOS
 The Pennsylvania State University The Graduate School College of Engineering ONLINE LIVESTREAM CAMERA CALIBRATION FROM CROWD SCENE VIDEOS A Thesis in Computer Science and Engineering by Anindita Bandyopadhyay
The Pennsylvania State University The Graduate School College of Engineering ONLINE LIVESTREAM CAMERA CALIBRATION FROM CROWD SCENE VIDEOS A Thesis in Computer Science and Engineering by Anindita Bandyopadhyay
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 33: Recognition Basics Slides from Andrej Karpathy and Fei-Fei Li http://vision.stanford.edu/teaching/cs231n/ Announcements Quiz moved to Tuesday Project 4
CS5670: Computer Vision Noah Snavely Lecture 33: Recognition Basics Slides from Andrej Karpathy and Fei-Fei Li http://vision.stanford.edu/teaching/cs231n/ Announcements Quiz moved to Tuesday Project 4
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Machine Learning 13. week
 Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Attributes. Computer Vision. James Hays. Many slides from Derek Hoiem
 Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Fast Learning and Prediction for Object Detection using Whitened CNN Features
 Fast Learning and Prediction for Object Detection using Whitened CNN Features Björn Barz Erik Rodner Christoph Käding Joachim Denzler Computer Vision Group Friedrich Schiller University Jena Ernst-Abbe-Platz
Fast Learning and Prediction for Object Detection using Whitened CNN Features Björn Barz Erik Rodner Christoph Käding Joachim Denzler Computer Vision Group Friedrich Schiller University Jena Ernst-Abbe-Platz