Some books on linear algebra
|
|
|
- Melina Lang
- 5 years ago
- Views:
Transcription


1 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H. Golub, Charles F. Van Loan, 1996
2 Last lecture 2-Frame Structure from Motion Multi-Frame Structure from Motion R p p C C T=C -C p' Ep 0 x' Fx 0
3 Today Continue on Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints
4 Structure from Motion by Factorization



5 Problem statement
6 SFM under orthographic projection 2D image point orthographic projection matrix 3D scene point Camera center q Π( p t) For example, Π a b c T 1 0 In general, Π subject to ΠΠ d e f 0 1
7 SFM under orthographic projection 2D image point orthographic projection matrix 3D scene point Camera center q n 21 3 Π( p t) n Choose scene origin to be the centroid of the 3D points pn 0 Choose image origin to be the centroid of the 2D points qn 0 q Πp
8 factorization (Tomasi & Kanade) n n 2 n 2 1 n 2 1 p p p q q q projection of n features in one image: n 3 3 2m n 2m n m mn m m n n p p p Π Π Π q q q q q q q q q projection of n features in m images W measurement M motion S shape Key Observation: rank(w) <= 3
9 Factorization known W 2mn M S 2m3 3n solve for Factorization Technique W is at most rank 3 (assuming no noise) We can use singular value decomposition to factor W: W 2mn M' S' 2m3 3n S differs from S by a linear transformation A: W M' S' ( MA )( AS) Solve for A by enforcing metric constraints on M 1
10 Metric constraints Enforcing Metric Constraints Compute A such that rows of M have these properties A Μ A M ' ' ' ' m 2 1 m 2 1 Trick (not in original Tomasi/Kanade paper, but in followup work) Constraints are linear in AA T : T i i T i i i i where AA G G A A T T T ' ' ' ' Solve for G first by writing equations for every i in M Then G = AA T by SVD
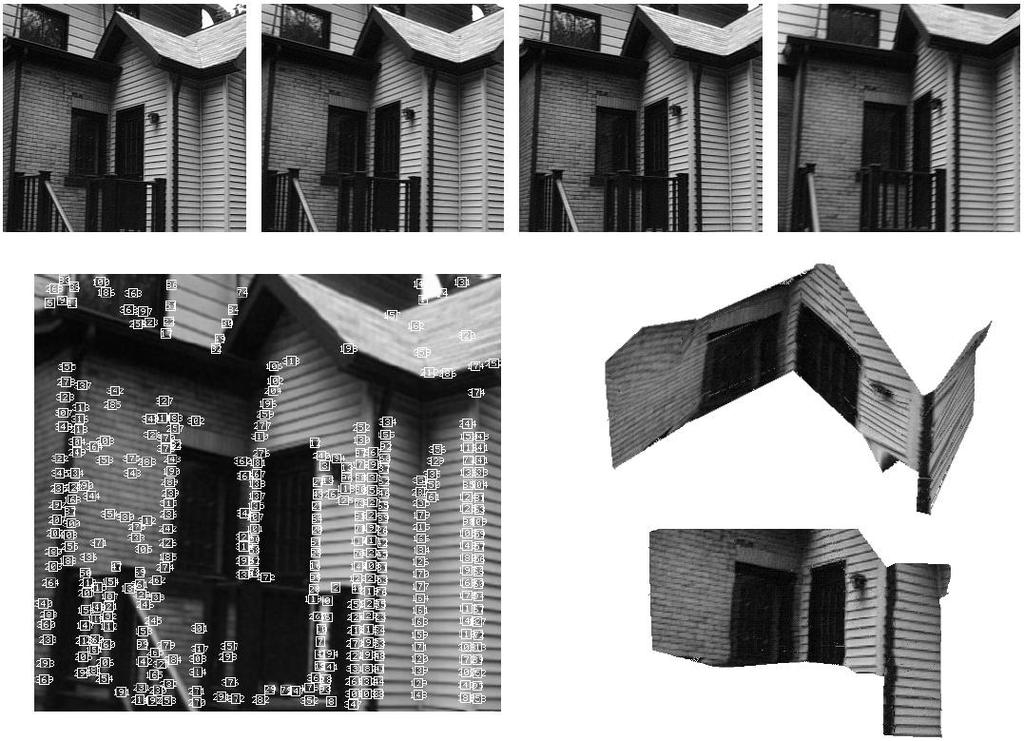
11 Results
12 Extensions to factorization methods Paraperspective [Poelman & Kanade, PAMI 97] Sequential Factorization [Morita & Kanade, PAMI 97] Factorization under perspective [Christy & Horaud, PAMI 96] [Sturm & Triggs, ECCV 96] Factorization with Uncertainty [Anandan & Irani, IJCV 2002]
13 Perspective Bundle adjustment
14 Bundle Adjustment How to initialize? 2 or 3 views at a time, add more iteratively [Hartley 00] What makes this non-linear minimization hard? many more parameters: potentially slow poorer conditioning (high correlation) potentially lots of outliers Richard Szeliski CSE 576 (Spring 2005): Computer Vision 14
: Computer Vision")
15 Lots of parameters: sparsity Only a few entries in Jacobian are non-zero Richard Szeliski CSE 576 (Spring 2005): Computer Vision 15
16 Structure from motion: limitations Very difficult to reliably estimate metric structure and motion unless: large (x or y) rotation or large field of view and depth variation Camera calibration important for Euclidean reconstructions Need good feature tracker Lens distortion Richard Szeliski CSE 576 (Spring 2005): Computer Vision 16

17 Track lifetime every 50th frame of a 800-frame sequence
18 Track lifetime lifetime of 3192 tracks from the previous sequence

19 Track lifetime track length histogram

20 Nonlinear lens distortion

21 Nonlinear lens distortion effect of lens distortion

22 Prior knowledge and scene constraints add a constraint that several lines are parallel
23 Prior knowledge and scene constraints add a constraint that it is a turntable sequence
24 Applications of Structure from Motion

25 Jurassic park

26 PhotoSynth

27 Multiview Stereo
28 Choosing the stereo baseline width of a pixel all of these points project to the same pair of pixels Large Baseline Small Baseline What s the optimal baseline? Too small: large depth error Too large: difficult search problem

29 The Effect of Baseline on Depth Estimation
30 1/z width of a pixel pixel matching score 1/z width of a pixel
31
32 Multibaseline Stereo Basic Approach Choose a reference view Use your favorite stereo algorithm BUT > replace two-view SSD with SSD over all baselines Limitations Must choose a reference view (bad) Visibility!





33 MSR Image based Reality Project


34 The visibility problem Which points are visible in which images? Known Scene Unknown Scene Forward Visibility known scene Inverse Visibility known images

")

35 Volumetric stereo Scene Volume V Input Images (Calibrated) Goal: Determine occupancy, color of points in V
36 Discrete formulation: Voxel Coloring Discretized Scene Volume Input Images (Calibrated) Goal: Assign RGBA values to voxels in V photo-consistent with images


37 Complexity and computability Discretized Scene Volume 3 N voxels C colors True Scene Photo-Consistent Scenes All Scenes (C N3 )
38 Issues Theoretical Questions Identify class of all photo-consistent scenes Practical Questions How do we compute photo-consistent models?
39 Voxel coloring solutions 1. C=2 (shape from silhouettes) Volume intersection [Baumgart 1974] > For more info: Rapid octree construction from image sequences. R. Szeliski, CVGIP: Image Understanding, 58(1):23-32, July (this paper is apparently not available online) or > W. Matusik, C. Buehler, R. Raskar, L. McMillan, and S. J. Gortler, Image-Based Visual Hulls, SIGGRAPH 2000 ( pdf 1.6 MB ) 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98]
")


40 Reconstruction from Silhouettes (C = 2) Binary Images Approach: Backproject each silhouette Intersect backprojected volumes
41 Volume intersection Reconstruction Contains the True Scene But is generally not the same In the limit (all views) get visual hull > Complement of all lines that don t intersect S
42 Voxel algorithm for volume intersection Color voxel black if on silhouette in every image O(? ), for M images, N 3 voxels Don t have to search 2 N3 possible scenes!
43 Properties of Volume Intersection Pros Easy to implement, fast Accelerated via octrees [Szeliski 1993] or interval techniques [Matusik 2000] Cons No concavities Reconstruction is not photo-consistent Requires identification of silhouettes
44 Voxel Coloring Solutions 1. C=2 (silhouettes) Volume intersection [Baumgart 1974] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] > For more info: 3. General Case Space carving [Kutulakos & Seitz 98]
45 Voxel Coloring Approach 1. Choose voxel 2. Project and correlate 3. Color if consistent (standard deviation of pixel colors below threshold) Visibility Problem: in which images is each voxel visible?





46 Depth Ordering: visit occluders first! Layers Scene Traversal Condition: depth order is the same for all input views
47 Panoramic Depth Ordering Cameras oriented in many different directions Planar depth ordering does not apply


48 Panoramic Depth Ordering Layers radiate outwards from cameras

49 Panoramic Layering Layers radiate outwards from cameras
50 Panoramic Layering Layers radiate outwards from cameras


51 Compatible Camera Configurations Depth-Order Constraint Scene outside convex hull of camera centers Inward-Looking cameras above scene Outward-Looking cameras inside scene



")

52 Calibrated Image Acquisition Selected Dinosaur Images Calibrated Turntable 360 rotation (21 images) Selected Flower Images



53 Voxel Coloring Results (Video) Dinosaur Reconstruction 72 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI Flower Reconstruction 70 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI
54 Limitations of Depth Ordering A view-independent depth order may not exist p q Need more powerful general-case algorithms Unconstrained camera positions Unconstrained scene geometry/topology
55 Voxel Coloring Solutions 1. C=2 (silhouettes) Volume intersection [Baumgart 1974] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98] > For more info:
56 Space Carving Algorithm Image 1 Image N... Space Carving Algorithm Initialize to a volume V containing the true scene Choose a voxel on the current surface Project to visible input images Carve if not photo-consistent Repeat until convergence




57 Which shape do you get? V V True Scene Photo Hull The Photo Hull is the UNION of all photo-consistent scenes in V It is a photo-consistent scene reconstruction Tightest possible bound on the true scene
58 Space Carving Algorithm The Basic Algorithm is Unwieldy Complex update procedure Alternative: Multi-Pass Plane Sweep Efficient, can use texture-mapping hardware Converges quickly in practice Easy to implement Results Algorithm
59 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence True Scene Reconstruction
60 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
61 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
62 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
63 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
64 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence



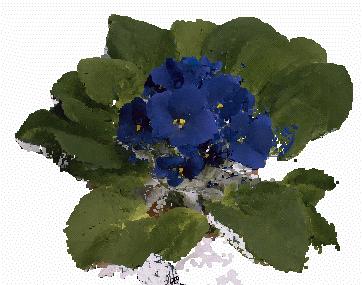
65 Space Carving Results: African Violet Input Image (1 of 45) Reconstruction Reconstruction Reconstruction


 Views")
66 Space Carving Results: Hand Input Image (1 of 100) Views of Reconstruction
67 Properties of Space Carving Pros Voxel coloring version is easy to implement, fast Photo-consistent results No smoothness prior Cons Bulging No smoothness prior
68 Alternatives to space carving Optimizing space carving recent surveys >Slabaugh et al., 2001 >Dyer et al., 2001 many others... Graph cuts Kolmogorov & Zabih Level sets introduce smoothness term surface represented as an implicit function in 3D volume optimize by solving PDE s

69 Alternatives to space carving Optimizing space carving recent surveys >Slabaugh et al., 2001 >Dyer et al., 2001 many others... Graph cuts Kolmogorov & Zabih Level sets introduce smoothness term surface represented as an implicit function in 3D volume optimize by solving PDE s
70 Level sets vs. space carving Advantages of level sets optimizes consistency with images + smoothness term excellent results for smooth things does not require as many images Advantages of space carving much simpler to implement runs faster (orders of magnitude) works better for thin structures, discontinuities For more info on level set stereo: Renaud Keriven s page: >
71 References Volume Intersection Martin & Aggarwal, Volumetric description of objects from multiple views, Trans. Pattern Analysis and Machine Intelligence, 5(2), 1991, pp Szeliski, Rapid Octree Construction from Image Sequences, Computer Vision, Graphics, and Image Processing: Image Understanding, 58(1), 1993, pp Matusik, Buehler, Raskar, McMillan, and Gortler, Image-Based Visual Hulls, Proc. SIGGRAPH 2000, pp Voxel Coloring and Space Carving Seitz & Dyer, Photorealistic Scene Reconstruction by Voxel Coloring, Intl. Journal of Computer Vision (IJCV), 1999, 35(2), pp Kutulakos & Seitz, A Theory of Shape by Space Carving, International Journal of Computer Vision, 2000, 38(3), pp Recent surveys > Slabaugh, Culbertson, Malzbender, & Schafer, A Survey of Volumetric Scene Reconstruction Methods from Photographs, Proc. workshop on Volume Graphics 2001, pp > Dyer, Volumetric Scene Reconstruction from Multiple Views, Foundations of Image Understanding, L. S. Davis, ed., Kluwer, Boston, 2001, ftp://ftp.cs.wisc.edu/computer-vision/repository/pdf/dyer.2001.fia.pdf
72 References Other references from this talk Multibaseline Stereo: Masatoshi Okutomi and Takeo Kanade. A multiple-baseline stereo. IEEE Trans. on Pattern Analysis and Machine Intelligence (PAMI), 15(4), 1993, pp Level sets: Faugeras & Keriven, Variational principles, surface evolution, PDE's, level set methods and the stereo problem", IEEE Trans. on Image Processing, 7(3), 1998, pp Mesh based: Fua & Leclerc, Object-centered surface reconstruction: Combining multiimage stereo and shading", IJCV, 16, 1995, pp D Room: Narayanan, Rander, & Kanade, Constructing Virtual Worlds Using Dense Stereo, Proc. ICCV, 1998, pp Graph-based: Kolmogorov & Zabih, Multi-Camera Scene Reconstruction via Graph Cuts, Proc. European Conf. on Computer Vision (ECCV), Helmholtz Stereo: Zickler, Belhumeur, & Kriegman, Helmholtz Stereopsis: Exploiting Reciprocity for Surface Reconstruction, IJCV, 49(2-3), 2002, pp
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Stereo Matching. Stereo Matching. Face modeling. Z-keying: mix live and synthetic
 Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp
 Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman. Lecture 11 Geometry, Camera Calibration, and Stereo.
 6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Structure from Motion
 Structure from Motion Lecture-13 Moving Light Display 1 Shape from Motion Problem Given optical flow or point correspondences, compute 3-D motion (translation and rotation) and shape (depth). 2 S. Ullman
Structure from Motion Lecture-13 Moving Light Display 1 Shape from Motion Problem Given optical flow or point correspondences, compute 3-D motion (translation and rotation) and shape (depth). 2 S. Ullman
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS INTRODUCTION
 PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Modeling, Combining, and Rendering Dynamic Real-World Events From Image Sequences
 Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
 COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University of Rochester Rochester, NY USA
 To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
To appear in: Proc. 7th Int. Conf. on Computer Vision, Corfu, Greece, September 22-25, 1999 A Theory of Shape by Space Carving Kiriakos N. Kutulakos Depts. of Computer Science & Dermatology University
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Study of Volumetric Methods for Face Reconstruction
 Study of Volumetric Methods for Face Reconstruction Gang ZENG Sylvain PARIS Dep. of Computer Science ARTIS / GRAVIR-IMAG HKUST INRIA Rhône-Alpes Clear Water Bay, Kowloon, Hong Kong 38334 Saint Ismier,
Study of Volumetric Methods for Face Reconstruction Gang ZENG Sylvain PARIS Dep. of Computer Science ARTIS / GRAVIR-IMAG HKUST INRIA Rhône-Alpes Clear Water Bay, Kowloon, Hong Kong 38334 Saint Ismier,
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
A Probabilistic Framework for Surface Reconstruction from Multiple Images
 A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
A Probabilistic Framework for Surface Reconstruction from Multiple Images Motilal Agrawal and Larry S. Davis Department of Computer Science, University of Maryland, College Park, MD 20742, USA email:{mla,lsd}@umiacs.umd.edu
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization
 Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
An Efficient Visual Hull Computation Algorithm
 An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
A Probabilistic Framework for Space Carving
 A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
A Probabilistic Framework for Space Carving A roadhurst, TW Drummond and R Cipolla Department of Engineering niversity of Cambridge Cambridge, K C2 1PZ Abstract This paper introduces a new probabilistic
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Image-based rendering using plane-sweeping modelisation
 Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
Today s lecture. Structure from Motion. Today s lecture. Parameterizing rotations
 Today s lecture Structure from Motion Computer Vision CSE576, Spring 2008 Richard Szeliski Geometric camera calibration camera matrix (Direct Linear Transform) non-linear least squares separating intrinsics
Today s lecture Structure from Motion Computer Vision CSE576, Spring 2008 Richard Szeliski Geometric camera calibration camera matrix (Direct Linear Transform) non-linear least squares separating intrinsics
View Synthesis using Convex and Visual Hulls. Abstract
 View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
Dense Matching of Multiple Wide-baseline Views
 Dense Matching of Multiple Wide-baseline Views Christoph Strecha KU Leuven Belgium firstname.surname@esat.kuleuven.ac.be Tinne Tuytelaars KU Leuven Belgium Luc Van Gool KU Leuven / ETH Zürich Belgium /
Dense Matching of Multiple Wide-baseline Views Christoph Strecha KU Leuven Belgium firstname.surname@esat.kuleuven.ac.be Tinne Tuytelaars KU Leuven Belgium Luc Van Gool KU Leuven / ETH Zürich Belgium /
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING
 VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Multiple Motion Scene Reconstruction from Uncalibrated Views
 Multiple Motion Scene Reconstruction from Uncalibrated Views Mei Han C & C Research Laboratories NEC USA, Inc. meihan@ccrl.sj.nec.com Takeo Kanade Robotics Institute Carnegie Mellon University tk@cs.cmu.edu
Multiple Motion Scene Reconstruction from Uncalibrated Views Mei Han C & C Research Laboratories NEC USA, Inc. meihan@ccrl.sj.nec.com Takeo Kanade Robotics Institute Carnegie Mellon University tk@cs.cmu.edu
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Real-Time Video-Based Rendering from Multiple Cameras
 Real-Time Video-Based Rendering from Multiple Cameras Vincent Nozick Hideo Saito Graduate School of Science and Technology, Keio University, Japan E-mail: {nozick,saito}@ozawa.ics.keio.ac.jp Abstract In
Real-Time Video-Based Rendering from Multiple Cameras Vincent Nozick Hideo Saito Graduate School of Science and Technology, Keio University, Japan E-mail: {nozick,saito}@ozawa.ics.keio.ac.jp Abstract In
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Perception and Action using Multilinear Forms
 Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid
 SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid Tianli Yu and Narendra Ahuja Beckman Institute & ECE Department Univ. of Illinois at Urbana-Champaign Urbana,
SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid Tianli Yu and Narendra Ahuja Beckman Institute & ECE Department Univ. of Illinois at Urbana-Champaign Urbana,
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
Polyhedral Visual Hulls for Real-Time Rendering
 Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
Projective Surface Refinement for Free-Viewpoint Video
 Projective Surface Refinement for Free-Viewpoint Video Gregor Miller, Jonathan Starck and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, UK {Gregor.Miller, J.Starck,
Projective Surface Refinement for Free-Viewpoint Video Gregor Miller, Jonathan Starck and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, UK {Gregor.Miller, J.Starck,
What Do N Photographs Tell Us About 3D Shape?
 What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Contents. 1 Introduction Background Organization Features... 7
 Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Photorealistic Scene Reconstruction by Voxel Coloring
 In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
In Proc. Computer Vision and Pattern Recognition Conf., pp. 1067-1073, 1997. Photorealistic Scene Reconstruction by Voxel Coloring Steven M. Seitz Charles R. Dyer Department of Computer Sciences University
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency
 1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
3D Reconstruction through Segmentation of Multi-View Image Sequences
 3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
Particle Tracking. For Bulk Material Handling Systems Using DEM Models. By: Jordan Pease
 Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Co
 Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Comp. Engineering Client and Media Systems Lab Georgia
Volumetric Warping for Voxel Coloring on an Infinite Domain Gregory G. Slabaugh Λ Thomas Malzbender, W. Bruce Culbertson y School of Electrical and Comp. Engineering Client and Media Systems Lab Georgia
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Shape and Motion Carving in 6D
 To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
To Appear in the Proceedings of the 000 IEEE Conference oncomputer Visionand Pattern Recognition Shape and Motion Carving in 6D Sundar Vedula, Simon Baker, Steven Seitz, and Takeo Kanade The Robotics Institute,
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Ray casting for incremental voxel colouring
 Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,