Object Recognition with Invariant Features
|
|
|
- Lee Bell
- 5 years ago
- Views:
Transcription
1 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user interfaces Location recognition Digital camera panoramas 3D scene modeling, augmented reality Slides credit: David Lowe

2 Zhang, Deriche, Faugeras, Luong (95) Apply Harris corner detector Match points by correlating only at corner points Derive epipolar alignment using robust least-squares


3 Cordelia Schmid & Roger Mohr (97) Apply Harris corner detector Use rotational invariants at corner points However, not scale invariant. Sensitive to viewpoint and illumination change.

4 Invariant Local Features Image content is transformed into local feature coordinates that are invariant to translation, rotation, scale, and other imaging parameters SIFT Features
5 Advantages of invariant local features Locality: features are local, so robust to occlusion and clutter (no prior segmentation) Distinctiveness: individual features can be matched to a large database of objects Quantity: many features can be generated for even small objects Efficiency: close to real-time performance Extensibility: can easily be extended to wide range of differing feature types, with each adding robustness
6 Res ample Blur Subtra ct Build Scale-Space Pyramid All scales must be examined to identify scale-invariant features An efficient function is to compute the Difference of Gaussian (DOG) pyramid (Burt & Adelson, 1983) Resample Blur Subtract

7 Scale space processed one octave at a time

8 Res ample Blur Subtra ct Key point localization Detect maxima and minima of difference-of-gaussian in scale space
9 Sampling frequency for scale More points are found as sampling frequency increases, but accuracy of matching decreases after 3 scales/octave
10 Select canonical orientation Create histogram of local gradient directions computed at selected scale Assign canonical orientation at peak of smoothed histogram Each key specifies stable 2D coordinates (x, y, scale, orientation) 0 2π
 832 DOG extrema (c) 729 left after peak value threshold (d) 536 left after testing ratio of principle")
11 Example of keypoint detection Threshold on value at DOG peak and on ratio of principle curvatures (Harris approach) (a) 233x189 image (b) 832 DOG extrema (c) 729 left after peak value threshold (d) 536 left after testing ratio of principle curvatures

12 SIFT vector formation Thresholded image gradients are sampled over 16x16 array of locations in scale space Create array of orientation histograms 8 orientations x 4x4 histogram array = 128 dimensions
13 Feature stability to noise Match features after random change in image scale & orientation, with differing levels of image noise Find nearest neighbor in database of 30,000 features
14 Feature stability to affine change Match features after random change in image scale & orientation, with 2% image noise, and affine distortion Find nearest neighbor in database of 30,000 features
15 Distinctiveness of features Vary size of database of features, with 30 degree affine change, 2% image noise Measure % correct for single nearest neighbor match
16 Nearest-neighbor matching to feature database Hypotheses are generated by approximate nearest neighbor matching of each feature to vectors in the database We use best-bin-first (Beis & Lowe, 97) modification to k-d tree algorithm Use heap data structure to identify bins in order by their distance from query point Result: Can give speedup by factor of 1000 while finding nearest neighbor (of interest) 95% of the time
17 Detecting 0.1% inliers among 99.9% outliers We need to recognize clusters of just 3 consistent features among 3000 feature match hypotheses LMS or RANSAC would be hopeless! Generalized Hough transform Vote for each potential match according to model ID and pose Insert into multiple bins to allow for error in similarity approximation Check collisions
18 Probability of correct match Compare distance of nearest neighbor to second nearest neighbor (from different object) Threshold of 0.8 provides excellent separation
19 Model verification 1. Examine all clusters with at least 3 features 2. Perform least-squares affine fit to model. 3. Discard outliers and perform top-down check for additional features. 4. Evaluate probability that match is correct Use Bayesian model, with probability that features would arise by chance if object was not present (Lowe, CVPR 01)
20 Solution for affine parameters Affine transform of [x,y] to [u,v]: Rewrite to solve for transform parameters:

21 3D Object Recognition Extract outlines with background subtraction

22 3D Object Recognition Only 3 keys are needed for recognition, so extra keys provide robustness Affine model is no longer as accurate
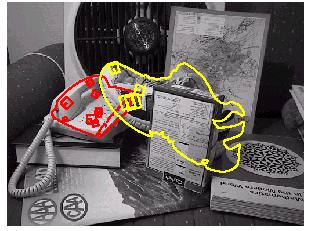
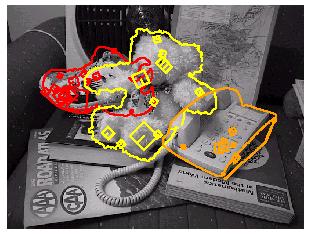
23 Recognition under occlusion


24 Test of illumination invariance Same image under differing illumination 273 keys verified in final match

25 Examples of view interpolation

26 Recognition using View Interpolation

27 Location recognition

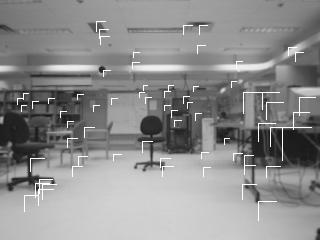
28 Robot localization results Joint work with Stephen Se, Jim Little Map registration: The robot can process 4 frames/sec and localize itself within 5 cm Global localization: Robot can be turned on and recognize its position anywhere within the map Closing-the-loop: Drift over long map building sequences can be recognized. Adjustment is performed by aligning submaps.
29 Robot Localization

30
31 Map continuously built over time

32 Locations of map features in 3D

33 Augmented Reality (with Iryna Gordon) Solve for 3D structure from multiple images Recognize scenes and insert 3D objects Shows one of 20 images taken with handheld camera


34 3D Structure and Virtual Object Placement Solve for cameras and 3D points: Uses bundle adjustment with Levenberg-Marquardt and robust metric Initialize all cameras at the same location and points at the same depths Solve bas-relief ambiguity by trying both options Insert object into scene: Set location in one image, move along epipolar in other, adjust orientation
35 Jitter Reduction Minimize change in camera location, while keeping solution within expected noise range: p camera pose W diagonal matrix for relative changes in camera parameters Adjust α to keep residual within noise level of data so that object does not lag large motions



36 Augmentation Examples Example of augmented tracking (executes about 5 frames/sec)

37 Sony Aibo (Evolution Robotics) SIFT usage: Recognize charging station Communicate with visual cards
38 Recognising Panoramas M. Brown and D. Lowe, University of British Columbia

39 Introduction Are you getting the whole picture? Compact Camera FOV = 50 x 35

40 Introduction Are you getting the whole picture? Compact Camera FOV = 50 x 35 Human FOV = 200 x 135

41 Introduction Are you getting the whole picture? Compact Camera FOV = 50 x 35 Human FOV = 200 x 135 Panoramic Mosaic = 360 x 180
42 Why Recognising Panoramas?
43 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images
44 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images
45 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images
46 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images 2D Rotations (θ, φ) Ordering matching images
47 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images 2D Rotations (θ, φ) Ordering matching images


")

")
48 Why Recognising Panoramas? 1D Rotations (θ) Ordering matching images 2D Rotations (θ, φ) Ordering matching images
49 Why Recognising Panoramas?
50 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
51 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
52 Feature Matching Overview SIFT Features Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions
53 Feature Matching Overview SIFT Features Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions




54 Invariant Features Schmid & Mohr 1997, Lowe 1999, Baumberg 2000, Tuytelaars & Van Gool 2000, Mikolajczyk & Schmid 2001, Brown & Lowe 2002, Matas et. al. 2002, Schaffalitzky & Zisserman 2002
55 Invariant Features SIFT Features Establish invariant frame Maxima/minima of scale-space DOG x, y, s Maximum of distribution of local gradients θ Form descriptor vector Histogram of smoothed local gradients 128 dimensions SIFT features are Geometrically invariant to similarity transforms, some robustness to affine change Photometrically invariant to affine changes in intensity
56 Feature Matching Overview SIFT Features Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions
57 Nearest Neighbour Matching Find k-nn for each feature k number of overlapping images (we use k = 4) Use k-d tree k-d tree recursively bi-partitions data at mean in the dimension of maximum variance Approximate nearest neighbours found in O(nlogn)
58 Feature Matching Overview SIFT Features Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions
59 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
60 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
61 Feature Matching Image Matching Overview RANSAC for Homography Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions
62 Feature Matching Image Matching Overview RANSAC for Homography Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

63 RANSAC for Homography
64 RANSAC for Homography

65 RANSAC for Homography
66 Feature Matching Image Matching Overview RANSAC for Homography Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

67 Probabilistic model for verification
68 Probabilistic model for verification Compare probability that this set of RANSAC inliers/outliers was generated by a correct/false image match n i = #inliers, n f = #features p 1 = p(inlier match), p 0 = p(inlier ~match) p min = acceptance probability Choosing values for p 1, p 0 and p min
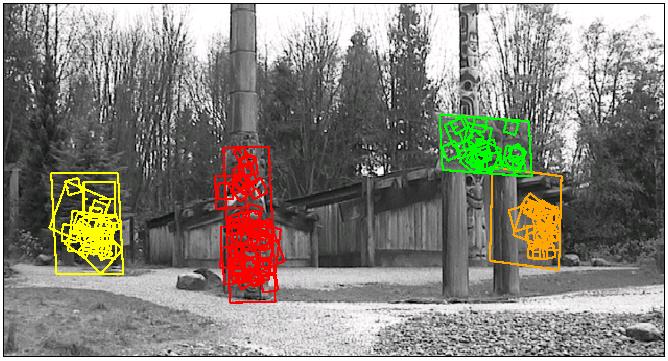
69 Finding the panoramas
70 Finding the panoramas
71 Finding the panoramas


























72 Finding the panoramas
73 Feature Matching Image Matching Overview RANSAC for Homography Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions
74 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
75 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
76 Feature Matching Image Matching Bundle Adjustment Error function Multi-band Blending Results Conclusions Overview
77 Feature Matching Image Matching Bundle Adjustment Error function Multi-band Blending Results Conclusions Overview
78 Error function Sum of squared projection errors n = #images I(i) = set of image matches to image i F(i, j) = set of feature matches between images i,j r ijk = residual of k th feature match between images i,j Robust error function
79 Homography for Rotation Parameterise each camera by rotation and focal length This gives pairwise homographies
80 Bundle Adjustment New images initialised with rotation, focal length of best matching image
81 Bundle Adjustment New images initialised with rotation, focal length of best matching image
82 Feature Matching Image Matching Bundle Adjustment Error function Multi-band Blending Results Conclusions Overview
83 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
84 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview


85 Multi-band Blending Burt & Adelson 1983 Blend frequency bands over range λ


86 2-band Blending Low frequency (λ > 2 pixels) High frequency (λ < 2 pixels)
87 Linear Blending
88 2-band Blending
89

90
91 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview
92 Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions Overview


93 Results
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Invariant Features from Interest Point Groups
 Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Distinctive Image Features from Scale-Invariant Keypoints
 International Journal of Computer Vision 60(2), 91 110, 2004 c 2004 Kluwer Academic Publishers. Manufactured in The Netherlands. Distinctive Image Features from Scale-Invariant Keypoints DAVID G. LOWE
International Journal of Computer Vision 60(2), 91 110, 2004 c 2004 Kluwer Academic Publishers. Manufactured in The Netherlands. Distinctive Image Features from Scale-Invariant Keypoints DAVID G. LOWE
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
SURF applied in Panorama Image Stitching
 Image Processing Theory, Tools and Applications SURF applied in Panorama Image Stitching Luo Juan 1, Oubong Gwun 2 Computer Graphics Lab, Computer Science & Computer Engineering, Chonbuk National University,
Image Processing Theory, Tools and Applications SURF applied in Panorama Image Stitching Luo Juan 1, Oubong Gwun 2 Computer Graphics Lab, Computer Science & Computer Engineering, Chonbuk National University,
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
Verslag Project beeldverwerking A study of the 2D SIFT algorithm
 Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Multi-Image Matching using Multi-Scale Oriented Patches
 Multi-Image Matching using Multi-Scale Oriented Patches Matthew Brown Department of Computer Science University of British Columbia mbrown@cs.ubc.ca Richard Szeliski Vision Technology Group Microsoft Research
Multi-Image Matching using Multi-Scale Oriented Patches Matthew Brown Department of Computer Science University of British Columbia mbrown@cs.ubc.ca Richard Szeliski Vision Technology Group Microsoft Research
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Shape recognition with edge-based features
 Shape recognition with edge-based features K. Mikolajczyk A. Zisserman C. Schmid Dept. of Engineering Science Dept. of Engineering Science INRIA Rhône-Alpes Oxford, OX1 3PJ Oxford, OX1 3PJ 38330 Montbonnot
Shape recognition with edge-based features K. Mikolajczyk A. Zisserman C. Schmid Dept. of Engineering Science Dept. of Engineering Science INRIA Rhône-Alpes Oxford, OX1 3PJ Oxford, OX1 3PJ 38330 Montbonnot
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
A SIFT Descriptor with Global Context
 A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Global localization from a single feature correspondence
 Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
A Comparison and Matching Point Extraction of SIFT and ISIFT
 A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
Wide Baseline Matching using Triplet Vector Descriptor
 1 Wide Baseline Matching using Triplet Vector Descriptor Yasushi Kanazawa Koki Uemura Department of Knowledge-based Information Engineering Toyohashi University of Technology, Toyohashi 441-8580, JAPAN
1 Wide Baseline Matching using Triplet Vector Descriptor Yasushi Kanazawa Koki Uemura Department of Knowledge-based Information Engineering Toyohashi University of Technology, Toyohashi 441-8580, JAPAN
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa