Calibrating a single camera. Odilon Redon, Cyclops, 1914
|
|
|
- Hortense Gibson
- 5 years ago
- Views:
Transcription

1 Calbratng a sngle camera Odlon Redon, Cclops, 94
2 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous???


3 Sngle-vew ambgut

4 Sngle-vew ambgut Rashad Alakbarov shadow sculptures

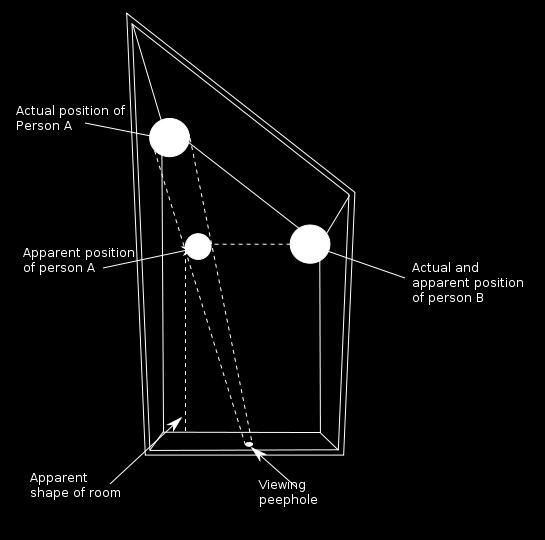
5 Sngle-vew ambgut Ames room
6 Our goal: Recover o 3D structure We wll need mult-vew geometr
7 Revew: Pnhole camera model world coordnate sstem Normalzed (camera) coordnate sstem: camera center s at the orgn, the prncpal as s the z-as, and aes o the mage plane are parallel to and aes o the world Goal o camera calbraton: go rom world coordnate sstem to mage coordnate sstem
8 ) /, / ( ),, ( Z Y Z Z Y! Z Y Z Y Z Y! Revew: Pnhole camera model P
9 Prncpal pont p p Prncpal pont (p): pont where prncpal as ntersects the mage plane Normalzed coordnate sstem: orgn o the mage s at the prncpal pont Image coordnate sstem: orgn s n the corner
10 ) /, / ( ),, ( p Z Y p Z Z Y + +! + + Z Z p Y Z p Z Y! Prncpal pont oset We want the prncpal pont to map to (p, p ) nstead o (,) p p Z Y p p
11 + + Z Y p p Z Zp Y Zp Prncpal pont oset p p K calbraton matr [ ] P K I prncpal pont: ), ( p p p p



12 p p m m K β α β α Pel coordnates m pels per meter n horzontal drecton, m pels per meter n vertcal drecton Pel sze: m m pels/m m pels
13 Camera rotaton and translaton In general, the camera coordnate rame wll be related to the world coordnate rame b a rotaton and a translaton Converson rom world to camera coordnate sstem (n non-homogeneous coordnates): ~ cam ( ) R ~ C ~ coords. o pont n camera rame coords. o a pont n world rame coords. o camera center n world rame
14 Camera rotaton and translaton ~ cam ( ) R ~ C ~ cam ~ cam R RC ~ ~ R RC ~ [ ] K[ R ] K I RC ~ cam P K[ R t], t RC ~

 Radal dstorton p p m m β α β α K [")
15 Camera parameters Intrnsc parameters Prncpal pont coordnates Focal length Pel magncaton actors Skew (non-rectangular pels) Radal dstorton p p m m β α β α K [ ] t P K R
16 Camera parameters P K[ R t] Intrnsc parameters Prncpal pont coordnates Focal length Pel magncaton actors Skew (non-rectangular pels) Radal dstorton Etrnsc parameters Rotaton and translaton relatve to world coordnate sstem P [ ~ ] K R RC What s the projecton o the camera center? PC ~ ~ C [ RC] K R coords. o camera center n world rame he camera center s the null space o the projecton matr!
17 Camera calbraton Z Y λ λ λ [ ] t K R Source: D. Hoem

18 Camera calbraton Gven n ponts wth known 3D coordnates and known mage projectons, estmate the camera parameters P?
19 P λ Camera calbraton: Lnear method P 3 P P P 3 P P P wo lnearl ndependent equatons
20 Camera calbraton: Lnear method P has degrees o reedom One D/3D correspondence gves us two lnearl ndependent equatons 6 correspondences needed or a mnmal soluton Homogeneous least squares: nd p mnmzng Ap Soluton gven b egenvector o A A wth smallest egenvalue p A 3 P P P n n n n n n!!!
21 Camera calbraton: Lnear method Note: or coplanar ponts that sats Π, we wll get degenerate solutons (Π,,), (,Π,), or (,,Π) Ap 3 P P P n n n n n n!!!
22 Camera calbraton: Lnear method he lnear method onl estmates the entres o the projecton matr: What we ultmatel want s a decomposton o ths matr nto the ntrnsc and etrnsc parameters: State-o-the-art methods use nonlnear optmzaton to solve or the parameter values drectl [ ] t K R Z Y λ λ λ
23 Camera calbraton: Lnear method Advantages: eas to ormulate and solve Dsadvantages Doesn t drectl tell ou camera parameters Doesn t model radal dstorton Can t mpose constrants, such as known ocal length and orthogonalt Non-lnear methods are preerred Dene error as sum o squared dstances between measured D ponts and estmated projectons o 3D ponts Mnmze error usng Newton s method or other non-lnear optmzaton Source: D. Hoem
24 A taste o mult-vew geometr: rangulaton Gven projectons o a 3D pont n two or more mages (wth known camera matrces), nd the coordnates o the pont
25 rangulaton Gven projectons o a 3D pont n two or more mages (wth known camera matrces), nd the coordnates o the pont? O O
26 rangulaton We want to ntersect the two vsual ras correspondng to and, but because o nose and numercal errors, the don t meet eactl? O O
27 rangulaton: Geometrc approach Fnd shortest segment connectng the two vewng ras and let be the mdpont o that segment O O
28 rangulaton: Nonlnear approach Fnd that mnmzes d (,P ) + d (,P )? P P O O
29 rangulaton: Lnear approach b a b a ] [ z z z b b b a a a a a a P P λ λ P P ]P [ ]P [ Cross product as matr multplcaton:
30 rangulaton: Lnear approach λ λ P P P P [ [ ]P ]P wo ndependent equatons each n terms o three unknown entres o
Geometry of a single camera. Odilon Redon, Cyclops, 1914
 Geometr o a single camera Odilon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one image is inherentl ambiguous??? Single-view ambiguit Single-view ambiguit Rashad Alakbarov
Geometr o a single camera Odilon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one image is inherentl ambiguous??? Single-view ambiguit Single-view ambiguit Rashad Alakbarov
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
What are the camera parameters? Where are the light sources? What is the mapping from radiance to pixel color? Want to solve for 3D geometry
 Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Image Alignment CSC 767
 Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Computer Vision. Exercise Session 1. Institute of Visual Computing
 Computer Vson Exercse Sesson 1 Organzaton Teachng assstant Basten Jacquet CAB G81.2 basten.jacquet@nf.ethz.ch Federco Camposeco CNB D12.2 fede@nf.ethz.ch Lecture webpage http://www.cvg.ethz.ch/teachng/compvs/ndex.php
Computer Vson Exercse Sesson 1 Organzaton Teachng assstant Basten Jacquet CAB G81.2 basten.jacquet@nf.ethz.ch Federco Camposeco CNB D12.2 fede@nf.ethz.ch Lecture webpage http://www.cvg.ethz.ch/teachng/compvs/ndex.php
LEAST SQUARES. RANSAC. HOUGH TRANSFORM.
 LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
Image warping and stitching May 5 th, 2015
 Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Multi-stable Perception. Necker Cube
 Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Geometric Transformations and Multiple Views
 CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
Prof. Feng Liu. Spring /24/2017
 Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
AIMS Computer vision. AIMS Computer Vision. Outline. Outline.
 AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
Radial Basis Functions
 Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Finding Intrinsic and Extrinsic Viewing Parameters from a Single Realist Painting
 Fndng Intrnsc and Extrnsc Vewng Parameters from a Sngle Realst Pantng Tadeusz Jordan 1, Davd G. Stork,3, Wa L. Khoo 1, and Zhgang Zhu 1 1 CUNY Cty College, Department of Computer Scence, Convent Avenue
Fndng Intrnsc and Extrnsc Vewng Parameters from a Sngle Realst Pantng Tadeusz Jordan 1, Davd G. Stork,3, Wa L. Khoo 1, and Zhgang Zhu 1 1 CUNY Cty College, Department of Computer Scence, Convent Avenue
New dynamic zoom calibration technique for a stereo-vision based multi-view 3D modeling system
 New dynamc oom calbraton technque for a stereo-vson based mult-vew 3D modelng system Tao Xan, Soon-Yong Park, Mural Subbarao Dept. of Electrcal & Computer Engneerng * State Unv. of New York at Stony Brook,
New dynamc oom calbraton technque for a stereo-vson based mult-vew 3D modelng system Tao Xan, Soon-Yong Park, Mural Subbarao Dept. of Electrcal & Computer Engneerng * State Unv. of New York at Stony Brook,
New Extensions of the 3-Simplex for Exterior Orientation
 New Extensons of the 3-Smplex for Exteror Orentaton John M. Stenbs Tyrone L. Vncent Wllam A. Hoff Colorado School of Mnes jstenbs@gmal.com tvncent@mnes.edu whoff@mnes.edu Abstract Object pose may be determned
New Extensons of the 3-Smplex for Exteror Orentaton John M. Stenbs Tyrone L. Vncent Wllam A. Hoff Colorado School of Mnes jstenbs@gmal.com tvncent@mnes.edu whoff@mnes.edu Abstract Object pose may be determned
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Introduction to Geometrical Optics - a 2D ray tracing Excel model for spherical mirrors - Part 2
 Introducton to Geometrcal Optcs - a D ra tracng Ecel model for sphercal mrrors - Part b George ungu - Ths s a tutoral eplanng the creaton of an eact D ra tracng model for both sphercal concave and sphercal
Introducton to Geometrcal Optcs - a D ra tracng Ecel model for sphercal mrrors - Part b George ungu - Ths s a tutoral eplanng the creaton of an eact D ra tracng model for both sphercal concave and sphercal
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
Recognizing Faces. Outline
 Recognzng Faces Drk Colbry Outlne Introducton and Motvaton Defnng a feature vector Prncpal Component Analyss Lnear Dscrmnate Analyss !"" #$""% http://www.nfotech.oulu.f/annual/2004 + &'()*) '+)* 2 ! &
Recognzng Faces Drk Colbry Outlne Introducton and Motvaton Defnng a feature vector Prncpal Component Analyss Lnear Dscrmnate Analyss !"" #$""% http://www.nfotech.oulu.f/annual/2004 + &'()*) '+)* 2 ! &
Slide 1 SPH3UW: OPTICS I. Slide 2. Slide 3. Introduction to Mirrors. Light incident on an object
 Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
Reading. 14. Subdivision curves. Recommended:
 eadng ecommended: Stollntz, Deose, and Salesn. Wavelets for Computer Graphcs: heory and Applcatons, 996, secton 6.-6., A.5. 4. Subdvson curves Note: there s an error n Stollntz, et al., secton A.5. Equaton
eadng ecommended: Stollntz, Deose, and Salesn. Wavelets for Computer Graphcs: heory and Applcatons, 996, secton 6.-6., A.5. 4. Subdvson curves Note: there s an error n Stollntz, et al., secton A.5. Equaton
Accounting for the Use of Different Length Scale Factors in x, y and z Directions
 1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
Model-Based Bundle Adjustment to Face Modeling
 Model-Based Bundle Adjustment to Face Modelng Oscar K. Au Ivor W. sang Shrley Y. Wong oscarau@cs.ust.hk vor@cs.ust.hk shrleyw@cs.ust.hk he Hong Kong Unversty of Scence and echnology Realstc facal synthess
Model-Based Bundle Adjustment to Face Modelng Oscar K. Au Ivor W. sang Shrley Y. Wong oscarau@cs.ust.hk vor@cs.ust.hk shrleyw@cs.ust.hk he Hong Kong Unversty of Scence and echnology Realstc facal synthess
RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA. Commission I, WG I/5
 RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA Taeyoon Lee a, *, Taeung Km a, Gunho Sohn b, James Elder a a Department of Geonformatc Engneerng, Inha Unersty, 253 Yonghyun-dong,
RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA Taeyoon Lee a, *, Taeung Km a, Gunho Sohn b, James Elder a a Department of Geonformatc Engneerng, Inha Unersty, 253 Yonghyun-dong,
Introduction to Multiview Rank Conditions and their Applications: A Review.
 Introducton to Multvew Rank Condtons and ther Applcatons: A Revew Jana Košecká Y Ma Department of Computer Scence, George Mason Unversty Electrcal & Computer Engneerng Department, Unversty of Illnos at
Introducton to Multvew Rank Condtons and ther Applcatons: A Revew Jana Košecká Y Ma Department of Computer Scence, George Mason Unversty Electrcal & Computer Engneerng Department, Unversty of Illnos at
Graph-based Clustering
 Graphbased Clusterng Transform the data nto a graph representaton ertces are the data ponts to be clustered Edges are eghted based on smlarty beteen data ponts Graph parttonng Þ Each connected component
Graphbased Clusterng Transform the data nto a graph representaton ertces are the data ponts to be clustered Edges are eghted based on smlarty beteen data ponts Graph parttonng Þ Each connected component
2D Raster Graphics. Integer grid Sequential (left-right, top-down) scan. Computer Graphics
 scan. Computer Graphics") 2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
LECTURE : MANIFOLD LEARNING
 LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
Non-Parametric Structure-Based Calibration of Radially Symmetric Cameras
 Non-Parametrc Structure-Based Calbraton of Radally Symmetrc Cameras Federco Camposeco, Torsten Sattler, Marc Pollefeys Department of Computer Scence, ETH Zürch, Swtzerland {federco.camposeco, torsten.sattler,
Non-Parametrc Structure-Based Calbraton of Radally Symmetrc Cameras Federco Camposeco, Torsten Sattler, Marc Pollefeys Department of Computer Scence, ETH Zürch, Swtzerland {federco.camposeco, torsten.sattler,
Angle-Independent 3D Reconstruction. Ji Zhang Mireille Boutin Daniel Aliaga
 Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Feature Reduction and Selection
 Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Lecture 4: Principal components
 /3/6 Lecture 4: Prncpal components 3..6 Multvarate lnear regresson MLR s optmal for the estmaton data...but poor for handlng collnear data Covarance matrx s not nvertble (large condton number) Robustness
/3/6 Lecture 4: Prncpal components 3..6 Multvarate lnear regresson MLR s optmal for the estmaton data...but poor for handlng collnear data Covarance matrx s not nvertble (large condton number) Robustness
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
LU Decomposition Method Jamie Trahan, Autar Kaw, Kevin Martin University of South Florida United States of America
 nbm_sle_sm_ludecomp.nb 1 LU Decomposton Method Jame Trahan, Autar Kaw, Kevn Martn Unverst of South Florda Unted States of Amerca aw@eng.usf.edu nbm_sle_sm_ludecomp.nb 2 Introducton When solvng multple
nbm_sle_sm_ludecomp.nb 1 LU Decomposton Method Jame Trahan, Autar Kaw, Kevn Martn Unverst of South Florda Unted States of Amerca aw@eng.usf.edu nbm_sle_sm_ludecomp.nb 2 Introducton When solvng multple
Calibration of an Articulated Camera System with Scale Factor Estimation
 Calbraton of an Artculated Camera System wth Scale Factor Estmaton CHEN Junzhou, Kn Hong WONG arxv:.47v [cs.cv] 7 Oct Abstract Multple Camera Systems (MCS) have been wdely used n many vson applcatons and
Calbraton of an Artculated Camera System wth Scale Factor Estmaton CHEN Junzhou, Kn Hong WONG arxv:.47v [cs.cv] 7 Oct Abstract Multple Camera Systems (MCS) have been wdely used n many vson applcatons and
A Range Image Refinement Technique for Multi-view 3D Model Reconstruction
 A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
EVALUATION OF RELATIVE POSE ESTIMATION METHODS FOR MULTI-CAMERA SETUPS
 EVALUAION OF RELAIVE POSE ESIMAION MEHODS FOR MULI-CAMERA SEUPS Volker Rodehorst *, Matthas Henrchs and Olaf Hellwch Computer Vson & Remote Sensng, Berln Unversty of echnology, Franklnstr. 8/9, FR 3-,
EVALUAION OF RELAIVE POSE ESIMAION MEHODS FOR MULI-CAMERA SEUPS Volker Rodehorst *, Matthas Henrchs and Olaf Hellwch Computer Vson & Remote Sensng, Berln Unversty of echnology, Franklnstr. 8/9, FR 3-,
Programming in Fortran 90 : 2017/2018
 Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
STRUCTURE and motion problems form a class of geometric
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 9, SEPTEMBER 008 1603 Multple-Vew Geometry under the L 1 -Norm Fredrk Kahl and Rchard Hartley, Senor Member, IEEE Abstract Ths
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 9, SEPTEMBER 008 1603 Multple-Vew Geometry under the L 1 -Norm Fredrk Kahl and Rchard Hartley, Senor Member, IEEE Abstract Ths
12/2/2009. Announcements. Parametric / Non-parametric. Case-Based Reasoning. Nearest-Neighbor on Images. Nearest-Neighbor Classification
 Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Abstract metric to nd the optimal pose and to measure the distance between the measurements
 3D Dstance Metrc for Pose Estmaton and Object Recognton from 2D Projectons Yacov Hel-Or The Wezmann Insttute of Scence Dept. of Appled Mathematcs and Computer Scence Rehovot 761, ISRAEL emal:toky@wsdom.wezmann.ac.l
3D Dstance Metrc for Pose Estmaton and Object Recognton from 2D Projectons Yacov Hel-Or The Wezmann Insttute of Scence Dept. of Appled Mathematcs and Computer Scence Rehovot 761, ISRAEL emal:toky@wsdom.wezmann.ac.l
A 3D Reconstruction System of Indoor Scenes with Rotating Platform
 A 3D Reconstructon System of Indoor Scenes wth Rotatng Platform Feng Zhang, Lmn Sh, Zhenhu Xu, Zhany Hu Insttute of Automaton, Chnese Academy of Scences {fzhang, lmsh, zhxu, huzy}@nlpr.a.ac.cnl Abstract
A 3D Reconstructon System of Indoor Scenes wth Rotatng Platform Feng Zhang, Lmn Sh, Zhenhu Xu, Zhany Hu Insttute of Automaton, Chnese Academy of Scences {fzhang, lmsh, zhxu, huzy}@nlpr.a.ac.cnl Abstract
Classification / Regression Support Vector Machines
 Classfcaton / Regresson Support Vector Machnes Jeff Howbert Introducton to Machne Learnng Wnter 04 Topcs SVM classfers for lnearly separable classes SVM classfers for non-lnearly separable classes SVM
Classfcaton / Regresson Support Vector Machnes Jeff Howbert Introducton to Machne Learnng Wnter 04 Topcs SVM classfers for lnearly separable classes SVM classfers for non-lnearly separable classes SVM
Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video
 01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
of Multiple Cameras Abstract This paper addresses the problem of calibrating camera parameters using variational methods.
 A Varatonal Approach to Problems n Calbraton 1 of Multple Cameras Gozde Unal 1, Anthony Yezz 2, Stefano Soatto 3, and Greg Slabaugh 1 Abstract Ths paper addresses the problem of calbratng camera parameters
A Varatonal Approach to Problems n Calbraton 1 of Multple Cameras Gozde Unal 1, Anthony Yezz 2, Stefano Soatto 3, and Greg Slabaugh 1 Abstract Ths paper addresses the problem of calbratng camera parameters
Exact solution, the Direct Linear Transfo. ct solution, the Direct Linear Transform
 Estmaton Basc questons We are gong to be nterested of solvng e.g. te followng estmaton problems: D omograpy. Gven a pont set n P and crespondng ponts n P, fnd te omograpy suc tat ( ) =. Camera projecton.
Estmaton Basc questons We are gong to be nterested of solvng e.g. te followng estmaton problems: D omograpy. Gven a pont set n P and crespondng ponts n P, fnd te omograpy suc tat ( ) =. Camera projecton.
An Application of the Dulmage-Mendelsohn Decomposition to Sparse Null Space Bases of Full Row Rank Matrices
 Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Kinematics Modeling and Analysis of MOTOMAN-HP20 Robot
 nd Workshop on Advanced Research and Technolog n Industr Applcatons (WARTIA ) Knematcs Modelng and Analss of MOTOMAN-HP Robot Jou Fe, Chen Huang School of Mechancal Engneerng, Dalan Jaotong Unverst, Dalan,
nd Workshop on Advanced Research and Technolog n Industr Applcatons (WARTIA ) Knematcs Modelng and Analss of MOTOMAN-HP Robot Jou Fe, Chen Huang School of Mechancal Engneerng, Dalan Jaotong Unverst, Dalan,
4 x 10 3 Residual during bilinear iteration error residual iteration
 Optmal Structure From Moton: Local Ambgutes and Global Estmates Stefano Soatto y and Roger Brockett z y Washngton Unversty, One Brookngs dr., St. Lous - MO 6, soatto@ee.wustl.edu and Dpartmento d Matematca
Optmal Structure From Moton: Local Ambgutes and Global Estmates Stefano Soatto y and Roger Brockett z y Washngton Unversty, One Brookngs dr., St. Lous - MO 6, soatto@ee.wustl.edu and Dpartmento d Matematca
Scan Conversion & Shading
 Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Towards Direct Recovery of Shape and Motion Parameters from Image Sequences
 Towards Drect Recovery of Shape and Moton arameters from Image Sequences Stephen Benot and Frank. Ferre McGll Unversty, Center for Intellgent Machnes, 4 Unversty St., Montréal, Québec, CANADA HA A7 Tel.:
Towards Drect Recovery of Shape and Moton arameters from Image Sequences Stephen Benot and Frank. Ferre McGll Unversty, Center for Intellgent Machnes, 4 Unversty St., Montréal, Québec, CANADA HA A7 Tel.:
Color in OpenGL Polygonal Shading Light Source in OpenGL Material Properties Normal Vectors Phong model
 Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
A Revisit of Methods for Determining the Fundamental Matrix with Planes
 A Revst of Methods for Determnng the Fundamental Matrx wth Planes Y Zhou 1,, Laurent Knep 1,, and Hongdong L 1,,3 1 Research School of Engneerng, Australan Natonal Unversty ARC Centre of Excellence for
A Revst of Methods for Determnng the Fundamental Matrx wth Planes Y Zhou 1,, Laurent Knep 1,, and Hongdong L 1,,3 1 Research School of Engneerng, Australan Natonal Unversty ARC Centre of Excellence for
Scan Conversion & Shading
 1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Amnon Shashua Shai Avidan Michael Werman. The Hebrew University, objects.
 Trajectory Trangulaton over Conc Sectons Amnon Shashua Sha Avdan Mchael Werman Insttute of Computer Scence, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: fshashua,avdan,wermang@cs.huj.ac.l Abstract
Trajectory Trangulaton over Conc Sectons Amnon Shashua Sha Avdan Mchael Werman Insttute of Computer Scence, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: fshashua,avdan,wermang@cs.huj.ac.l Abstract
A Comparison and Evaluation of Three Different Pose Estimation Algorithms In Detecting Low Texture Manufactured Objects
 Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
ROBOT KINEMATICS. ME Robotics ME Robotics
 ROBOT KINEMATICS Purpose: The purpose of ths chapter s to ntroduce you to robot knematcs, and the concepts related to both open and closed knematcs chans. Forward knematcs s dstngushed from nverse knematcs.
ROBOT KINEMATICS Purpose: The purpose of ths chapter s to ntroduce you to robot knematcs, and the concepts related to both open and closed knematcs chans. Forward knematcs s dstngushed from nverse knematcs.
Machine Learning. Support Vector Machines. (contains material adapted from talks by Constantin F. Aliferis & Ioannis Tsamardinos, and Martin Law)
") Machne Learnng Support Vector Machnes (contans materal adapted from talks by Constantn F. Alfers & Ioanns Tsamardnos, and Martn Law) Bryan Pardo, Machne Learnng: EECS 349 Fall 2014 Support Vector Machnes
Machne Learnng Support Vector Machnes (contans materal adapted from talks by Constantn F. Alfers & Ioanns Tsamardnos, and Martn Law) Bryan Pardo, Machne Learnng: EECS 349 Fall 2014 Support Vector Machnes
Computer Vision I. Xbox Kinnect: Rectification. The Fundamental matrix. Stereo III. CSE252A Lecture 16. Example: forward motion
 Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
Kent State University CS 4/ Design and Analysis of Algorithms. Dept. of Math & Computer Science LECT-16. Dynamic Programming
 CS 4/560 Desgn and Analyss of Algorthms Kent State Unversty Dept. of Math & Computer Scence LECT-6 Dynamc Programmng 2 Dynamc Programmng Dynamc Programmng, lke the dvde-and-conquer method, solves problems
CS 4/560 Desgn and Analyss of Algorthms Kent State Unversty Dept. of Math & Computer Scence LECT-6 Dynamc Programmng 2 Dynamc Programmng Dynamc Programmng, lke the dvde-and-conquer method, solves problems
Alignment and Object Instance Recognition
 Algnment and Object Instance Recognton Computer Vson Ja-Bn Huang, Vrgna Tech Man sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 2 due 11:59 PM Oct 9 Anonmous feedback Lectures Mcrophone on our
Algnment and Object Instance Recognton Computer Vson Ja-Bn Huang, Vrgna Tech Man sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 2 due 11:59 PM Oct 9 Anonmous feedback Lectures Mcrophone on our
Face Recognition University at Buffalo CSE666 Lecture Slides Resources:
 Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
A NEW METHOD FOR STEREO- CAMERAS SELF-CALIBRATION IN SCHEIMPFLUG CONDITION
 A NEW METHOD FOR STEREO- CAMERAS SELF-CALIBRATION IN SCHEIMPFLUG CONDITION S. Hamroun 1, H. Louhch 1, H. Ben Assa 1, M. Elhajem 2 1 Unté de Métrologe en Mécanque des Fludes et Thermque, Ecole Natonale
A NEW METHOD FOR STEREO- CAMERAS SELF-CALIBRATION IN SCHEIMPFLUG CONDITION S. Hamroun 1, H. Louhch 1, H. Ben Assa 1, M. Elhajem 2 1 Unté de Métrologe en Mécanque des Fludes et Thermque, Ecole Natonale
Any Pair of 2D Curves Is Consistent with a 3D Symmetric Interpretation
 Symmetry 2011, 3, 365-388; do:10.3390/sym3020365 OPEN ACCESS symmetry ISSN 2073-8994 www.mdp.com/journal/symmetry Artcle Any Par of 2D Curves Is Consstent wth a 3D Symmetrc Interpretaton Tadamasa Sawada
Symmetry 2011, 3, 365-388; do:10.3390/sym3020365 OPEN ACCESS symmetry ISSN 2073-8994 www.mdp.com/journal/symmetry Artcle Any Par of 2D Curves Is Consstent wth a 3D Symmetrc Interpretaton Tadamasa Sawada
Fitting and Alignment
 Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Kinematics of pantograph masts
 Abstract Spacecraft Mechansms Group, ISRO Satellte Centre, Arport Road, Bangalore 560 07, Emal:bpn@sac.ernet.n Flght Dynamcs Dvson, ISRO Satellte Centre, Arport Road, Bangalore 560 07 Emal:pandyan@sac.ernet.n
Abstract Spacecraft Mechansms Group, ISRO Satellte Centre, Arport Road, Bangalore 560 07, Emal:bpn@sac.ernet.n Flght Dynamcs Dvson, ISRO Satellte Centre, Arport Road, Bangalore 560 07 Emal:pandyan@sac.ernet.n
Geometric Primitive Refinement for Structured Light Cameras
 Self Archve Verson Cte ths artcle as: Fuersattel, P., Placht, S., Maer, A. Ress, C - Geometrc Prmtve Refnement for Structured Lght Cameras. Machne Vson and Applcatons 2018) 29: 313. Geometrc Prmtve Refnement
Self Archve Verson Cte ths artcle as: Fuersattel, P., Placht, S., Maer, A. Ress, C - Geometrc Prmtve Refnement for Structured Lght Cameras. Machne Vson and Applcatons 2018) 29: 313. Geometrc Prmtve Refnement
Self-Calibration from Image Triplets. 1 Robotics Research Group, Department of Engineering Science, Oxford University, England
 Self-Calbraton from Image Trplets Martn Armstrong 1, Andrew Zsserman 1 and Rchard Hartley 2 1 Robotcs Research Group, Department of Engneerng Scence, Oxford Unversty, England 2 The General Electrc Corporate
Self-Calbraton from Image Trplets Martn Armstrong 1, Andrew Zsserman 1 and Rchard Hartley 2 1 Robotcs Research Group, Department of Engneerng Scence, Oxford Unversty, England 2 The General Electrc Corporate
Region Segmentation Readings: Chapter 10: 10.1 Additional Materials Provided
 Regon Segmentaton Readngs: hater 10: 10.1 Addtonal Materals Provded K-means lusterng tet EM lusterng aer Grah Parttonng tet Mean-Shft lusterng aer 1 Image Segmentaton Image segmentaton s the oeraton of
Regon Segmentaton Readngs: hater 10: 10.1 Addtonal Materals Provded K-means lusterng tet EM lusterng aer Grah Parttonng tet Mean-Shft lusterng aer 1 Image Segmentaton Image segmentaton s the oeraton of
Two Dimensional Projective Point Matching
 Two Dmensonal Projectve Pont Matchng Jason Denton & J. Ross Beverdge Colorado State Unversty Computer Scence Department Ft. Collns, CO 80523 denton@cs.colostate.edu Abstract Pont matchng s the task of
Two Dmensonal Projectve Pont Matchng Jason Denton & J. Ross Beverdge Colorado State Unversty Computer Scence Department Ft. Collns, CO 80523 denton@cs.colostate.edu Abstract Pont matchng s the task of
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR
 ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
Research on laser tracker measurement accuracy and data processing. Liang Jing IHEP,CHINA
 Research on laser tracker measurement accuracy and data processng Lang Jng IHEP,CHINA 214.1 1 Outlne 1. Accuracy test experment for laser tracker In the transversal drecton In the longtudnal drecton In
Research on laser tracker measurement accuracy and data processng Lang Jng IHEP,CHINA 214.1 1 Outlne 1. Accuracy test experment for laser tracker In the transversal drecton In the longtudnal drecton In
A Robust Method for Estimating the Fundamental Matrix
 Proc. VIIth Dgtal Image Computng: Technques and Applcatons, Sun C., Talbot H., Ourseln S. and Adraansen T. (Eds.), 0- Dec. 003, Sydney A Robust Method for Estmatng the Fundamental Matrx C.L. Feng and Y.S.
Proc. VIIth Dgtal Image Computng: Technques and Applcatons, Sun C., Talbot H., Ourseln S. and Adraansen T. (Eds.), 0- Dec. 003, Sydney A Robust Method for Estmatng the Fundamental Matrx C.L. Feng and Y.S.
Robust Computation and Parametrization of Multiple View. Relations. Oxford University, OX1 3PJ. Gaussian).
.") Robust Computaton and Parametrzaton of Multple Vew Relatons Phl Torr and Andrew Zsserman Robotcs Research Group, Department of Engneerng Scence Oxford Unversty, OX1 3PJ. Abstract A new method s presented
Robust Computaton and Parametrzaton of Multple Vew Relatons Phl Torr and Andrew Zsserman Robotcs Research Group, Department of Engneerng Scence Oxford Unversty, OX1 3PJ. Abstract A new method s presented
Image Fusion With a Dental Panoramic X-ray Image and Face Image Acquired With a KINECT
 Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
USING GRAPHING SKILLS
 Name: BOLOGY: Date: _ Class: USNG GRAPHNG SKLLS NTRODUCTON: Recorded data can be plotted on a graph. A graph s a pctoral representaton of nformaton recorded n a data table. t s used to show a relatonshp
Name: BOLOGY: Date: _ Class: USNG GRAPHNG SKLLS NTRODUCTON: Recorded data can be plotted on a graph. A graph s a pctoral representaton of nformaton recorded n a data table. t s used to show a relatonshp
Exterior Orientation using Coplanar Parallel Lines
 Exteror Orentaton usng Coplanar Parallel Lnes Frank A. van den Heuvel Department of Geodetc Engneerng Delft Unversty of Technology Thsseweg 11, 69 JA Delft, The Netherlands Emal: F.A.vandenHeuvel@geo.tudelft.nl
Exteror Orentaton usng Coplanar Parallel Lnes Frank A. van den Heuvel Department of Geodetc Engneerng Delft Unversty of Technology Thsseweg 11, 69 JA Delft, The Netherlands Emal: F.A.vandenHeuvel@geo.tudelft.nl
Feature Extraction and Registration An Overview
 Feature Extracton and Regstraton An Overvew S. Seeger, X. Laboureux Char of Optcs, Unversty of Erlangen-Nuremberg, Staudstrasse 7/B2, 91058 Erlangen, Germany Emal: sns@undne.physk.un-erlangen.de, xl@undne.physk.un-erlangen.de
Feature Extracton and Regstraton An Overvew S. Seeger, X. Laboureux Char of Optcs, Unversty of Erlangen-Nuremberg, Staudstrasse 7/B2, 91058 Erlangen, Germany Emal: sns@undne.physk.un-erlangen.de, xl@undne.physk.un-erlangen.de
R s s f. m y s. SPH3UW Unit 7.3 Spherical Concave Mirrors Page 1 of 12. Notes
 SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
1. Answer the following. a. A beam of vertically polarized light of intensity W/m2 encounters two polarizing filters as shown below.
 1. Answer the followng. a. A beam of vertcally lght of ntensty 160.0 W/m2 encounters two polarzng flters as shown below. Vertcally ncdent tu-
1. Answer the followng. a. A beam of vertcally lght of ntensty 160.0 W/m2 encounters two polarzng flters as shown below. Vertcally ncdent tu-
INF Repetition Anne Solberg INF
 INF 43 7..7 Repetton Anne Solberg anne@f.uo.no INF 43 Classfers covered Gaussan classfer k =I k = k arbtrary Knn-classfer Support Vector Machnes Recommendaton: lnear or Radal Bass Functon kernels INF 43
INF 43 7..7 Repetton Anne Solberg anne@f.uo.no INF 43 Classfers covered Gaussan classfer k =I k = k arbtrary Knn-classfer Support Vector Machnes Recommendaton: lnear or Radal Bass Functon kernels INF 43
CS 231A Computer Vision Midterm
 CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (22 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (22 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
Announcements. Supervised Learning
 Announcements See Chapter 5 of Duda, Hart, and Stork. Tutoral by Burge lnked to on web page. Supervsed Learnng Classfcaton wth labeled eamples. Images vectors n hgh-d space. Supervsed Learnng Labeled eamples
Announcements See Chapter 5 of Duda, Hart, and Stork. Tutoral by Burge lnked to on web page. Supervsed Learnng Classfcaton wth labeled eamples. Images vectors n hgh-d space. Supervsed Learnng Labeled eamples
Ecient Computation of the Most Probable Motion from Fuzzy. Moshe Ben-Ezra Shmuel Peleg Michael Werman. The Hebrew University of Jerusalem
 Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Shape Representation Robust to the Sketching Order Using Distance Map and Direction Histogram
 Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
arxiv: v1 [cs.ro] 8 Jul 2016
![arxiv: v1 [cs.ro] 8 Jul 2016](/thumbs/95/122994620.jpg "arxiv: v1 [cs.ro] 8 Jul 2016") Non-Central Catadoptrc Cameras Pose Estmaton usng 3D Lnes* André Mateus, Pedro Mraldo and Pedro U. Lma arxv:1607.02290v1 [cs.ro] 8 Jul 2016 Abstract In ths artcle we purpose a novel method for planar pose
Non-Central Catadoptrc Cameras Pose Estmaton usng 3D Lnes* André Mateus, Pedro Mraldo and Pedro U. Lma arxv:1607.02290v1 [cs.ro] 8 Jul 2016 Abstract In ths artcle we purpose a novel method for planar pose
PROJECTIVE RECONSTRUCTION OF BUILDING SHAPE FROM SILHOUETTE IMAGES ACQUIRED FROM UNCALIBRATED CAMERAS
 PROJECTIVE RECONSTRUCTION OF BUILDING SHAPE FROM SILHOUETTE IMAGES ACQUIRED FROM UNCALIBRATED CAMERAS Po-Lun La and Alper Ylmaz Photogrammetrc Computer Vson Lab Oho State Unversty, Columbus, Oho, USA -la.138@osu.edu,
PROJECTIVE RECONSTRUCTION OF BUILDING SHAPE FROM SILHOUETTE IMAGES ACQUIRED FROM UNCALIBRATED CAMERAS Po-Lun La and Alper Ylmaz Photogrammetrc Computer Vson Lab Oho State Unversty, Columbus, Oho, USA -la.138@osu.edu,
3D Modeling Using Multi-View Images. Jinjin Li. A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science
 3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
6.1 2D and 3D feature-based alignment 275. similarity. Euclidean
 6.1 2D and 3D feature-based algnment 275 y translaton smlarty projectve Eucldean affne x Fgure 6.2 Basc set of 2D planar transformatons Once we have extracted features from mages, the next stage n many
6.1 2D and 3D feature-based algnment 275 y translaton smlarty projectve Eucldean affne x Fgure 6.2 Basc set of 2D planar transformatons Once we have extracted features from mages, the next stage n many
A Scalable Projective Bundle Adjustment Algorithm using the L Norm
 Sxth Indan Conference on Computer Vson, Graphcs & Image Processng A Scalable Projectve Bundle Adjustment Algorthm usng the Norm Kaushk Mtra and Rama Chellappa Dept. of Electrcal and Computer Engneerng
Sxth Indan Conference on Computer Vson, Graphcs & Image Processng A Scalable Projectve Bundle Adjustment Algorthm usng the Norm Kaushk Mtra and Rama Chellappa Dept. of Electrcal and Computer Engneerng
y and the total sum of
 Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Wavefront Reconstructor
 A Dstrbuted Smplex B-Splne Based Wavefront Reconstructor Coen de Vsser and Mchel Verhaegen 14-12-201212 2012 Delft Unversty of Technology Contents Introducton Wavefront reconstructon usng Smplex B-Splnes
A Dstrbuted Smplex B-Splne Based Wavefront Reconstructor Coen de Vsser and Mchel Verhaegen 14-12-201212 2012 Delft Unversty of Technology Contents Introducton Wavefront reconstructon usng Smplex B-Splnes
Hand Eye Calibration Applied to Viewpoint Selection for Robotic Vision Yuichi Motai, Member, IEEE, and Akio Kosaka, Member, IEEE
 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 10, OCTOBER 2008 3731 Hand Eye Calbraton Appled to Vewpont Selecton for Robotc Vson Yuch Mota, Member, IEEE, and Ako Kosaka, Member, IEEE Abstract
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 10, OCTOBER 2008 3731 Hand Eye Calbraton Appled to Vewpont Selecton for Robotc Vson Yuch Mota, Member, IEEE, and Ako Kosaka, Member, IEEE Abstract
Machine Learning 9. week
 Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Application of Visual Tracking for Robot-Assisted Laparoscopic Surgery
 Applcaton of Vsual Trackng for Robot-Asssted Laparoscopc Surger Xaol Zhang and Shahram Paandeh Expermental Robotcs Laborator School of Engneerng Scence Smon Fraser Unverst Burnab, BC, V5A 1S6, Canada xzhanga@cs.sfu.ca,
Applcaton of Vsual Trackng for Robot-Asssted Laparoscopc Surger Xaol Zhang and Shahram Paandeh Expermental Robotcs Laborator School of Engneerng Scence Smon Fraser Unverst Burnab, BC, V5A 1S6, Canada xzhanga@cs.sfu.ca,
The Research of Ellipse Parameter Fitting Algorithm of Ultrasonic Imaging Logging in the Casing Hole
 Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
Planar Catadioptric Stereo: Multiple-View Geometry and Image-Based Camera Localization
 Manuscrpt Marottn et al., Spec. Issue Vs. Serv. Clck here to vew lnked References Planar Catadoptrc Stereo: Multple-Vew Geometry and Image-Based Camera Localzaton Gan Luca Marottn a,stefano Schegg b,fabo
Manuscrpt Marottn et al., Spec. Issue Vs. Serv. Clck here to vew lnked References Planar Catadoptrc Stereo: Multple-Vew Geometry and Image-Based Camera Localzaton Gan Luca Marottn a,stefano Schegg b,fabo