CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
|
|
|
- Randolf Snow
- 5 years ago
- Views:
Transcription
1 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation Detecting Lines with Hough Transform Detecting Circles and Ellipses. Sources: Burger and Burge Digital Image Processing Chapter 9 Fosyth and Ponce Computer Vision a Modern approach 1


2 Mid-level vision Vision as an inference problem: Some observation/measurements (images) A model Objective: what caused this measurement? What distinguishes vision from other inference problems? A lot of data. We don t know which of these data may be useful to solve the inference problem and which may not. Which pixels are useful and which are not? Which edges are useful and which are not? Why do these tokens belong together? It is difficult to tell whether a pixel (token) lies on a surface by simply looking at the pixel 2

 top down segmentation tokens belong together because they lie on the same object bottom up segmentation tokens belong together because they are locally coherent Grouping (or")
3 Segmentation Can we achieve a compact and suggestive representation of the interesting image data that emphasizes the properties that make it interesting Segmentation Grouping Perceptual organization Fitting What is interesting and what is not depends on the application General ideas tokens whatever we need to group (pixels, points, surface elements, etc., etc.) top down segmentation tokens belong together because they lie on the same object bottom up segmentation tokens belong together because they are locally coherent Grouping (or clustering) collect together tokens that belong together Fitting associate a model with tokens issues which model? which token goes to which element? how many elements in the model? 3
4 Segmentation Different problems same problem: segmentation Summarizing a video: segment a video into shots, find coherent segments in the video, find key frames Finding machine parts: finding lines, circles, Finding people: find body segments, find human motion patterns Finding buildings from aerial imagery: find polygonal regions, line segments Searching a collection of images: find coherent color, texture regions, shape Segmentation Segmentation is a big topic We will look into: Segmentation by clustering: Forming image segments: How to decompose the image into superpixels image regions that are coherent in color and texture Shape of the region is not that important while segmenting Segmentation by model fitting: Fitting lines and curves to edge points: Which points belong to which line, how many lines? What about more complicated models, e.g. fitting a deformable contour! 4

5 Segmentation as Clustering Objective: Which components of a data set naturally belong together Partitioning Decomposition: Starting from a large data set how to partition it into pieces given some notion of association between data items Decompose an image into regions that have coherent color and texture Decompose a video sequence into shots Grouping Collect sets of data item that make sense together given our notion of association Collect together edge segments that seems to belong to a line Question: what is our notion of association? One view of segmentation is that it determines which component of the image form the figure and which form the ground. What is the figure and the background in this image? 5
6 Grouping and Gestalt Gestalt: German for form, whole, group Laws of Organization in Perceptual Forms (Gestalt school of psychology) Max Wertheimer there are contexts in which what is happening in the whole cannot be deduced from the characteristics of the separate pieces, but conversely; what happens to a part of the whole is, in clearcut cases, determined by the laws of the inner structure of its whole Muller-Layer effect: This effect arises from some property of the relationships that form the whole rather than from the properties of each separate segment. Grouping and Gestalt Can we write down a series of rules by which image elements would be associated together and interpreted as a group? What are the factors that makes a set of elements to be grouped Human vision uses these factors in some way 6
7 Not Grouped Proximity: Tokens that are nearby tend to be grouped together. Similarity: Similar tokens tend to be grouped together. Similarity Common Fate: Tokens that have coherent motion tend to be grouped together Common Region: Tokens that lie inside the same closed region tend to be grouped together Parallelism: Parallel curves or tokens tend to be grouped together Symmetry: Curves that lead to symmetric groups are grouped together Continuity: Tokens that lead to continuous curves tend to be grouped Closure: Tokens or curves that tend to lead to closed curves tend to be grouped together. 7
8 Familiar configuration: tokens that, when grouped, lead to a familiar object tend to be grouped 8

9 Occlusion appears to be a very important cue in grouping Illusory contours: tokens are grouped together because they provide a cue to the presence of an occluding object 9

10 Detecting lines and simple curves Finding salient structures How to group collections of edge points (or corners) belonging to the same line or curve? Search for globally apparent structures that inherently express certain common shape features Many man-made objects exhibits simple geometric forms: lines, circles, ellipses. 10






")
11 Hough Transform Goal: find which tokens belongs to which objects Hough transform: localizing any shape that can be defined parametrically within a distribution of points (Paul Hough) Example: lines, circles, ellipses. 11
12 12
13 13 All lines passing through an image point (x i,y i ) are characterized by a line in the parameter space with equation:
 of a line gives a better representation. Why?")
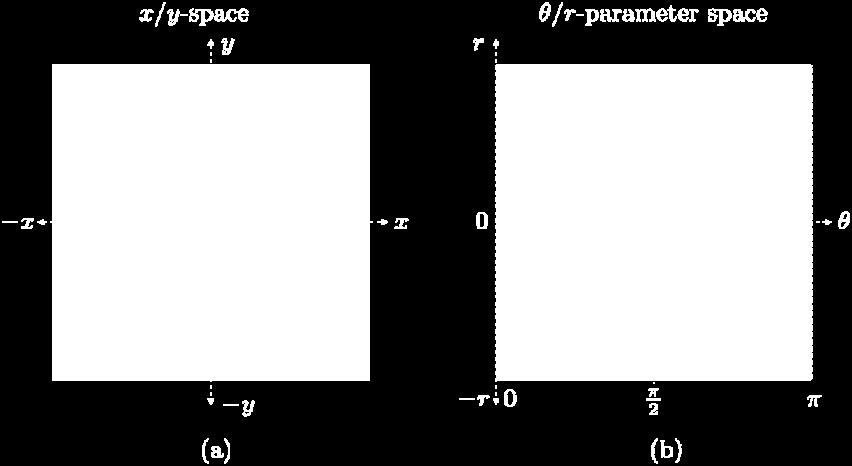
14 Accumulator array: a discrete representation of the parameter space as a 2D array Given an image point, we increment all the points on it s corresponding line in the parameter space A line in the image will be the intersection of multiple lines in the parameter space. A better line representation The Hessian Normal Form (HNF) of a line gives a better representation. Why? HNF: Parameter space is defined by r and theta 14

15 tokens votes 15


16 tokens votes 16


17 Mechanics of the Hough transform Construct an array representing θ, r For each point, render the curve (θ, r) into this array, adding one at each cell Difficulties how big should the cells be? (too big, and we cannot distinguish between quite different lines; too small, and noise causes lines to be missed) How to find peaks? Threshold Non-maxima suppression How many lines? count the peaks in the Hough array Who belongs to which line? tag the votes Hardly ever satisfactory in practice, because problems with noise and cell size defeat it 17
18 18




19 Circles and ellipses Better Idea: If we know the radius, the locations of all possible centers lie on a circle 19


20 For a given point (u,v), at each plane ρ i along the ρ axis, a circle centered at u,v with radius ρ i is rendered Detecting Ellipses? An ellipse has five dimensional parameter space! There are better ways! Generalized Hough transform 20

21 21 Circles and ellipses
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Fitting. Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local
 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
CS 556: Computer Vision. Lecture 18
 CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They can be performed sequentially or simultaneou
 Model tting They can be performed sequentially or simultaneou") an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
HOUGH TRANSFORM. Plan for today. Introduction to HT. An image with linear structures. INF 4300 Digital Image Analysis
 INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Computer Vision Grouping and Segmentation. Grouping and Segmentation
 Computer Vision Grouping and Segmentation Professor Hager http://www.cs.jhu.edu/~hager Grouping and Segmentation G&S appear to be one of the early processes in human vision They are a way of *organizing*
Computer Vision Grouping and Segmentation Professor Hager http://www.cs.jhu.edu/~hager Grouping and Segmentation G&S appear to be one of the early processes in human vision They are a way of *organizing*
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Generalized Hough Transform, line fitting
 Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Computer Vision 5 Segmentation by Clustering
 Computer Vision 5 Segmentation by Clustering MAP-I Doctoral Programme Miguel Tavares Coimbra Outline Introduction Applications Simple clustering K-means clustering Graph-theoretic clustering Acknowledgements:
Computer Vision 5 Segmentation by Clustering MAP-I Doctoral Programme Miguel Tavares Coimbra Outline Introduction Applications Simple clustering K-means clustering Graph-theoretic clustering Acknowledgements:
Template Matching Rigid Motion
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Edge linking. Two types of approaches. This process needs to be able to bridge gaps in detected edges due to the reason mentioned above
 Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Segmentation by Clustering
 KECE471 Computer Vision Segmentation by Clustering Chang-Su Kim Chapter 14, Computer Vision by Forsyth and Ponce Note: Dr. Forsyth s notes are partly used. Jae-Kyun Ahn in Korea University made the first
KECE471 Computer Vision Segmentation by Clustering Chang-Su Kim Chapter 14, Computer Vision by Forsyth and Ponce Note: Dr. Forsyth s notes are partly used. Jae-Kyun Ahn in Korea University made the first
Introduction. Chapter Overview
 Chapter 1 Introduction The Hough Transform is an algorithm presented by Paul Hough in 1962 for the detection of features of a particular shape like lines or circles in digitalized images. In its classical
Chapter 1 Introduction The Hough Transform is an algorithm presented by Paul Hough in 1962 for the detection of features of a particular shape like lines or circles in digitalized images. In its classical
Segmentation by Clustering. Segmentation by Clustering Reading: Chapter 14 (skip 14.5) General ideas
 General ideas") Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Segmentation by Clustering Reading: Chapter 14 (skip 14.5)
") Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
CMPSCI 670: Computer Vision! Grouping
 CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
OBJECT detection in general has many applications
 1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
Grouping and Segmentation
 03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Circular Hough Transform
 Circular Hough Transform Simon Just Kjeldgaard Pedersen Aalborg University, Vision, Graphics, and Interactive Systems, November 2007 1 Introduction A commonly faced problem in computer vision is to determine
Circular Hough Transform Simon Just Kjeldgaard Pedersen Aalborg University, Vision, Graphics, and Interactive Systems, November 2007 1 Introduction A commonly faced problem in computer vision is to determine
Optimal Grouping of Line Segments into Convex Sets 1
 Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES. D. H. Ballard Pattern Recognition Vol. 13 No
 GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
GENERALIZING THE HOUGH TRANSFORM TO DETECT ARBITRARY SHAPES D. H. Ballard Pattern Recognition Vol. 13 No. 2 1981 What is the generalized Hough (Huff) transform used for? Hough transform is a way of encoding
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together.
 In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
E0005E - Industrial Image Analysis
 E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
Grouping and Segmentation
 Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Image Processing and Image Analysis VU
 Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
An edge is not a line... Edge Detection. Finding lines in an image. Finding lines in an image. How can we detect lines?
 Edge Detection An edge is not a line... original image Cann edge detector Compute image derivatives if gradient magnitude > τ and the value is a local maimum along gradient direction piel is an edge candidate
Edge Detection An edge is not a line... original image Cann edge detector Compute image derivatives if gradient magnitude > τ and the value is a local maimum along gradient direction piel is an edge candidate
CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
Symmetry Based Semantic Analysis of Engineering Drawings
 Symmetry Based Semantic Analysis of Engineering Drawings Thomas C. Henderson, Narong Boonsirisumpun, and Anshul Joshi University of Utah, SLC, UT, USA; tch at cs.utah.edu Abstract Engineering drawings
Symmetry Based Semantic Analysis of Engineering Drawings Thomas C. Henderson, Narong Boonsirisumpun, and Anshul Joshi University of Utah, SLC, UT, USA; tch at cs.utah.edu Abstract Engineering drawings
Elaborazione delle Immagini Informazione Multimediale. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation
 CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
Good Continuation of Boundary Contour
 Thinh Nguyen 10/18/99 Lecture Notes CS294 Visual Grouping and Recognition Professor: Jitendra Malik Good Continuation of Boundary Contour Review Factors that leads to grouping. Similarity (brightness,
Thinh Nguyen 10/18/99 Lecture Notes CS294 Visual Grouping and Recognition Professor: Jitendra Malik Good Continuation of Boundary Contour Review Factors that leads to grouping. Similarity (brightness,
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
From Szymon Rusinkiewicz, Princeton
 Hough Transform General idea: transform from image coordinates to parameter space of feature Need parameterized model of features For each piel, determine all parameter values that might have given rise
Hough Transform General idea: transform from image coordinates to parameter space of feature Need parameterized model of features For each piel, determine all parameter values that might have given rise
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Segmentation and low-level grouping.
 Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
WHAT YOU SHOULD LEARN
 GRAPHS OF EQUATIONS WHAT YOU SHOULD LEARN Sketch graphs of equations. Find x- and y-intercepts of graphs of equations. Use symmetry to sketch graphs of equations. Find equations of and sketch graphs of
GRAPHS OF EQUATIONS WHAT YOU SHOULD LEARN Sketch graphs of equations. Find x- and y-intercepts of graphs of equations. Use symmetry to sketch graphs of equations. Find equations of and sketch graphs of
SEGMENTATION USING CLUSTERING METHODS
 Chapter 16 SEGMENTATION USING CLUSTERING METHODS An attractive broad view of vision is that it is an inference problem: we have some measurements, and we wish to determine what caused them, using a mode.
Chapter 16 SEGMENTATION USING CLUSTERING METHODS An attractive broad view of vision is that it is an inference problem: we have some measurements, and we wish to determine what caused them, using a mode.
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm
 6.801/6.866 Machine Vision Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm Problem 1 Line Fitting through Segmentation (Matlab) a) Write a Matlab function to generate noisy line segment data with
6.801/6.866 Machine Vision Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm Problem 1 Line Fitting through Segmentation (Matlab) a) Write a Matlab function to generate noisy line segment data with
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Segmentation and Grouping
 02/23/10 Segmentation and Grouping Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Last week Clustering EM Today s class More on EM Segmentation and grouping Gestalt cues By boundaries
02/23/10 Segmentation and Grouping Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Last week Clustering EM Today s class More on EM Segmentation and grouping Gestalt cues By boundaries
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Lecture 10: Semantic Segmentation and Clustering
 Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Example 1: Regions. Image Segmentation. Example 3: Lines and Circular Arcs. Example 2: Straight Lines. Region Segmentation: Segmentation Criteria
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Let be a function. We say, is a plane curve given by the. Let a curve be given by function where is differentiable with continuous.
 Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Example 2: Straight Lines. Image Segmentation. Example 3: Lines and Circular Arcs. Example 1: Regions
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration
 ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
2D image segmentation based on spatial coherence
 2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data