Structure-oriented Networks of Shape Collections
|
|
|
- Dwayne Hubbard
- 5 years ago
- Views:
Transcription
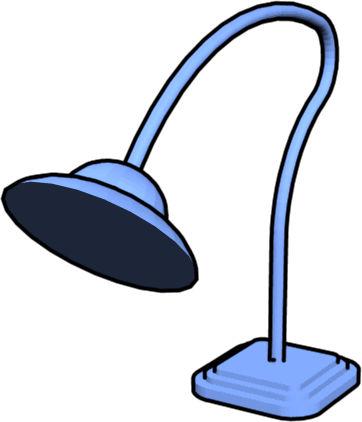
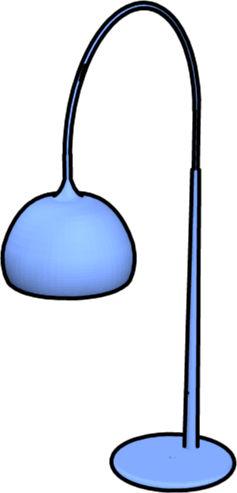
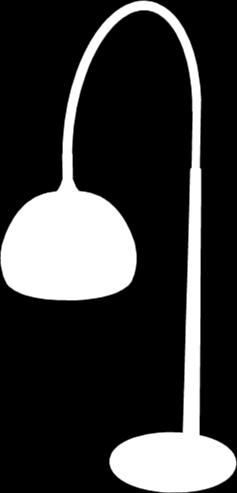
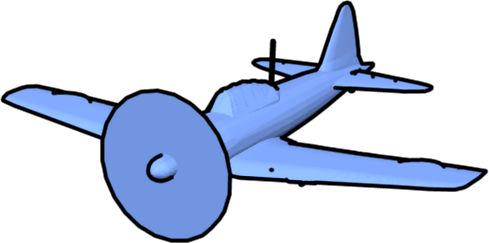
1 Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material In this supplementary material, we provide additional evaluation and comparisons to our method. Dataset Decomposition Matching Lifting Chair (large) 9min 1.5h Table 5min 0.8h Car 8min 1h Plane 8min 1.4h Lamp 3min 0.4h Guitar 50s 4min Faucet 1min 5min Chair (small) 28s 3min Vase 25s 2min Individual 0.2s 0.05s 0.4s Table 1: Timing. mmary of running times on batch tasks as well as average individual execution durations per task. The lifting task is not executed in batch as it is invoked on-demand during propagation. 1.1 Timing and implementation We summarize the run times for each step of our approach in Table 1. We provide overall batch run times measured for the decomposition and matching tasks on each dataset, as well as average individual run times for each task. All steps are implemented in Matlab, and batch tasks are executed on 4 parallel workers where possible. Our method performs simple and local operations and is more efficient than our implementation of Wang et al. [2013], which took 3.8 and 7.3 minutes to decompose and match the COSEG chair set, respectively (under similar implementation conditions). The parameters we employ throughout the computation mainly control the characteristics of the formed regions, balancing intraregion complexity and overall decomposition complexity. We require our regions to be simple, such that noticeable structural changes define borders between them. Simultaneously, we aim for a compact decomposition that is meaningful and easy to match to others. Our experiments were carried out with the same configuration of parameters and we noted that small changes do not affect the results significantly. For a full implementation of our method please see our project page underhttp:// noafish/corrnet. 1.2 Decomposition and matching Figure 1 features several pairs of shapes undergoing decomposition and matching. 1.3 Correspondence networks Comparison on BHCP. Figure 2 contains a quantitative comparison on three out of the four sets of the BHCP correspondence benchmark [Kim et al. 2013] (chair, plane, helicopter). A subset of the shapes in each of these sets is accompanied by ground-truth feature points for correspondence prediction evaluation. For each of these subsets, we apply our decomposition and matching method in an all-pairs manner. That is, each shape is matched against all other shapes in the subset. Next, we run two experiments where we compute correspondence accuracy according to the ground-truth feature points. In the first experiment, face-level correspondences are inferred directly from the matching between any pair of shapes. In the second experiment, we first compute correspondence propagation routes based on our distance matrix, and then compute a face-level correspondence for each pair of shapes, by propagating correspondences along the minimax path (as described in the paper). Since our matching may be partial by design, we emphasize that we are not necessarily able to match all points in the set of groundtruth correspondences. Indeed, in all three sets, we computed only a portion of the given correspondences. In the chair subset, we were able to compute 73.4% of the correspondences in the first experiment (direct comparison), and 89.4% in the second experiment (propagation). In the plane set, we computed 90.2% and 96.4%, and in the helicopter set 86.7% and 93.8%, respectively. For each unmatched correspondence, we set the predicted distance to as a penalty. Examining the curves in Figure 2, we note the substantial gap between our two experiments, in favor of the second. This result supports our central claim that correspondence inference via similar shapes can provide a more reliable estimation. Additionally, we observe the steep rise of the curve of our method compared to those of previous methods ( [Kim et al. 2013; Huang et al. 2014]), and attribute it to two characteristics: 1) Our method assumes a prealigned set; 2) Our method allows many-to-many face correspondences. Finally, we note that all three subsets are of a relatively small size ( 100 shapes), but still contain considerable shape variations. For the construction of a meaningful and well-connected correspondence network, our method requires a reasonably dense set when high variation is observed. Thus, a greater contribution can be achieved within sets that are more densely populated in terms of their similarities. Figures 3 4 feature an example extracted from the subset of chairs, where a directly-computed correspondence between two chairs is unsatisfactory. In comparison, we show that the by-proxy correspondence inference, computed along a propagation path through two 3rd-party shapes, provides a correspondence of higher quality, with more well-matched feature points. Furthermore, we note that despite some partial matches along the path, resulting from differences in part sizes and structure, the multi-view nature of the matching is able to make up for some of the missing information. Correspondence subtrees. Figure 5 contains several examples of correspondence subtrees, each being a portion of a minimum spanning tree of a network of correspondences constructed for a set of shapes.

![We combine the recent shape correspondence method of Solomon et al. [2016] with a segmentation propagation scheme to obtain a labeling for the COSEG chairs set.](/docs-images/86/93472526/images/2-3.jpg "Since this method does not provide an estimation of similarity between shapes, we utilize distances to select 15 seeds (as described in the paper) and determine propagation routes.")

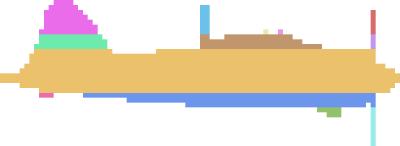
2 1.4 Segmentation transfer Figure 6 features examples for segmentation transfer through propagation on various shapes. 1.5 Isometry-based correspondence experiment In this experiment, we evaluate whether correspondence methods designed for nearly isometric shapes are suitable for structurevarying man-made shapes. We combine the recent shape correspondence method of Solomon et al. [2016] with a segmentation propagation scheme to obtain a labeling for the COSEG chairs set. Since this method does not provide an estimation of similarity between shapes, we utilize distances to select 15 seeds (as described in the paper) and determine propagation routes. In this experiment, we observe that although this method is robust to multimodal data and approximates semantic correspondences under nonrigid articulation-like deformations, it is not suitable for man-made shapes. Our shape class incorporates large variation in size and structure within a part, which adds ambiguity to correspondence estimation. This type of behavior is not well aligned with the assumptions made by nearly-isometric correspondence matching methods, therefore they are unlikely to be suitable in this context. The tested approach achieves 60% accuracy on the examined set, and Figure 7 features an example where the method fails to infer a reliable mapping between structurally different shapes. 1.6 Shape retrieval Figures 8 10 contain example queries and retrieval results of our method compared to others, on different sets from the test set of SHREC 2016 [Savva et al. 2016]. Figures contain example conditional queries and retrieval results of our method. References HUANG, Q., WANG, F., AND GUIBAS, L Functional map networks for analyzing and browsing large shape collections. ACM Trans. Graph. (SIGGRAPH) 33, 4, 36:1 11. KIM, V. G., LI, W., MITRA, N. J., CHAUDHURI, S., DIVERDI, S., AND FUNKHOUSER, T Learning part-based templates from large collections of 3d shapes. ACM Trans. Graph. (SIGGRAPH) 32, 4, 70:1 12. SAVVA, M., YU, F., SU, H., AONO, M., CHEN, B., COHEN- OR, D., DENG, W., SU, H., BAI, S., BAI, X., FISH, N., HAN, J., KALOGERAKIS, E., LEARNED-MILLER, E. G., LI, Y., LIAO, M., MAJI, S., TATSUMA, A., WANG, Y., ZHANG, N., AND ZHOU, Z Large-Scale 3D Shape Retrieval from ShapeNet Core55. In Eurographics Workshop on 3D Object Retrieval, The Eurographics Association, A. Ferreira, A. Giachetti, and D. Giorgi, Eds. SOLOMON, J., PEYRÉ, G., KIM, V., AND SRA, S Entropic metric alignment for correspondence problems. ACM Trans. Graph. (SIGGRAPH), to appear. WANG, Y., GONG, M., WANG, T., COHEN-OR, D., ZHANG, H., AND CHEN, B Projective analysis for 3D shape segmentation. ACM Trans. Graph. (SIGGRAPH Asia) 32, 6, 192:1 12. Figure 2: Comparison on Chair/Plane/Helicopter from the BHCP benchmark. Given groud-truth feature points on each shape, the curve of each method indicates the percentage of correspondences that were matched to within a certain error margin (in terms of Euclidean distance), indicated by the x-axis. We compare to Kim et al. [2013] and Huang et al. [2014] on two variations of our method. In OursDirect, we compute correspondences between every pair of shapes directly from their matching. In OursProp, we compute minimax propagation paths within our correspondence network, and then propagate correspondences through 3rd-party shapes.
 (g) (h) Figure")





+(d).")


+(f), which are")













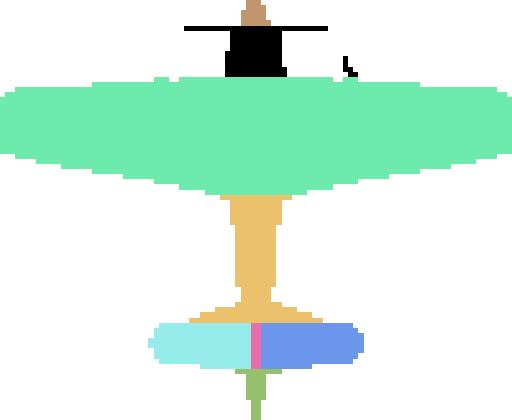
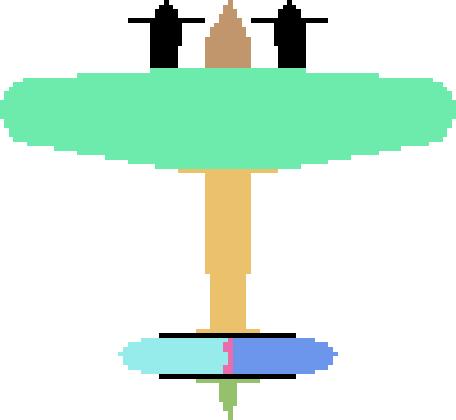
3 (a) (b) (c) (d) (e) (f) (g) (h) Figure 4: Direct correspondence vs. correspondence propagation. The ground-truth feature points of the source chair are shown for two views in (a)+(b), and those of the target chair are shown in (c)+(d). The points on the target shape that correspond to the ground-truth points of the source chair are shown in (e)+(f), which are computed by our method using the direct approach. Corresponding points computed by our method using propagation are shown in (g)+(h). Figure 6: Segmentation propagation paths. We show the transference of a consistent semantic segmentation through the face-level correspondences obtained by our matching process. Starting from a manual segmentation given for the leftmost source shape in a sequence, we propagate the segmentation along the path towards the rightmost target shape. Parts colored in grey have no match to the preceding shape and remain unlabeled.

 (b)")




















4 Query Method Top-5 retrievals * * (a) (b) (c) Figure 7: A correspondence between structurally distinct shapes computed with the method of Solomon et al. [2016]. We select four points on shape (a), and compute the regions with the highest correspondence probability in shape (b) (seen from another angle in (c)). Note that the resulting mapping is not semantically meaningful. * * Figure 8: Shape retrieval comparison (1 of 3). Top-5 retrievals given by our method (), compared to those given by the descriptor and the method of et al. [2015].





























5 Query Method Top-5 retrievals Query Method Top-5 retrievals * * Figure 9: Shape retrieval comparison (2 of 3). Top-5 retrievals given by our method (), compared to those given by the descriptor and the method of et al. [2015]. Figure 10: Shape retrieval comparison (3 of 3). Top-5 retrievals given by our method (), compared to those given by the descriptor and the method of et al. [2015].






6 Query Condition Top-5 retrievals Query Condition Top-5 retrievals Figure 11: Directional shape retrieval (1 of 3). Examples of retrieval results for conditional queries, specifying one of two directions: simpler shapes / more complex shapes. The results are returned in the order of their structural similarity to the query. Figure 12: Directional shape retrieval (2 of 3). Examples of retrieval results for conditional queries, specifying one of two directions: simpler shapes / more complex shapes. The results are returned in the order of their structural similarity to the query.
.")

7 Query Condition Top-5 retrievals Figure 13: Directional shape retrieval (3 of 3). Examples of retrieval results for conditional queries, specifying one of two directions: simpler shapes / more complex shapes. The results are returned in the order of their structural similarity to the query.










8 shape decomposition 1 matching 1 decomposition 2 matching 2 Figure 1: Decomposition and matching examples.











9 shape dec 1 match 1 dec 2 match 2 dec 3 match 3 dec 4 match 4 Figure 3: Direct correspondence vs. correspondence propagation. The source and target shapes are shown in the first two rows along with their decompositions and matchings. Note the missing and incorrect matches inferred as part of this direct matching. In the following pairs of rows, we feature pairs of shapes and their matchings, such that we start from the source shape, pass through two 3rd-party shapes, and end at the target shape. This propagation approach infers a better correspondence between the source and target, despite partial matches along the path.





10 (a) (b) (c) (d) (e) (f) Figure 5: Selected subtrees sampled from our correspondence networks. Given a source shape (the root at the bottom of each tree), we show shapes that can be reached by following a few neighbor connections in the network of correspondences.
Shape Co-analysis. Daniel Cohen-Or. Tel-Aviv University
 Shape Co-analysis Daniel Cohen-Or Tel-Aviv University 1 High-level Shape analysis [Fu et al. 08] Upright orientation [Mehra et al. 08] Shape abstraction [Kalograkis et al. 10] Learning segmentation [Mitra
Shape Co-analysis Daniel Cohen-Or Tel-Aviv University 1 High-level Shape analysis [Fu et al. 08] Upright orientation [Mehra et al. 08] Shape abstraction [Kalograkis et al. 10] Learning segmentation [Mitra
Finding Structure in Large Collections of 3D Models
 Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Exploring Collections of 3D Models using Fuzzy Correspondences
 Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Modeling and Analyzing 3D Shapes using Clues from 2D Images. Minglun Gong Dept. of CS, Memorial Univ.
 Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Discovering Similarities in 3D Data
 Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Supplementary A. Overview. C. Time and Space Complexity. B. Shape Retrieval. D. Permutation Invariant SOM. B.1. Dataset
 Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Learning Part-based Templates from Large Collections of 3D Shapes
 Learning Part-based Templates from Large Collections of 3D Shapes Vladimir G. Kim 1 Wilmot Li 2 Niloy J. Mitra 3 Siddhartha Chaudhuri 1 Stephen DiVerdi 2,4 Thomas Funkhouser 1 1 Princeton University 2
Learning Part-based Templates from Large Collections of 3D Shapes Vladimir G. Kim 1 Wilmot Li 2 Niloy J. Mitra 3 Siddhartha Chaudhuri 1 Stephen DiVerdi 2,4 Thomas Funkhouser 1 1 Princeton University 2
Data-Driven Geometry Processing Map Synchronization I. Qixing Huang Nov. 28 th 2018
 Data-Driven Geometry Processing Map Synchronization I Qixing Huang Nov. 28 th 2018 Shape matching Affine Applications Shape reconstruction Transfer information Aggregate information Protein docking Pair-wise
Data-Driven Geometry Processing Map Synchronization I Qixing Huang Nov. 28 th 2018 Shape matching Affine Applications Shape reconstruction Transfer information Aggregate information Protein docking Pair-wise
The correspondence problem. A classic problem. A classic problem. Deformation-Drive Shape Correspondence. Fundamental to geometry processing
 The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
Finding Surface Correspondences With Shape Analysis
 Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
arxiv: v4 [cs.cv] 29 Mar 2019
![arxiv: v4 [cs.cv] 29 Mar 2019](/thumbs/96/128038877.jpg "arxiv: v4 [cs.cv] 29 Mar 2019") PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Data-Driven Shape Analysis --- Joint Shape Matching I. Qi-xing Huang Stanford University
 Data-Driven Shape Analysis --- Joint Shape Matching I Qi-xing Huang Stanford University 1 Shape matching Affine Applications Shape reconstruction Transfer information Aggregate information Protein docking
Data-Driven Shape Analysis --- Joint Shape Matching I Qi-xing Huang Stanford University 1 Shape matching Affine Applications Shape reconstruction Transfer information Aggregate information Protein docking
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Unsupervised Co-Segmentation of 3D Shapes via Affinity Aggregation Spectral Clustering
 Unsupervised Co-Segmentation of 3D Shapes via Affinity Aggregation Spectral Clustering Zizhao Wu a, Yunhai Wang b, Ruyang Shou a, Baoquan Chen b, Xinguo Liu a Corresponding author: cloudseawang@gmail.com
Unsupervised Co-Segmentation of 3D Shapes via Affinity Aggregation Spectral Clustering Zizhao Wu a, Yunhai Wang b, Ruyang Shou a, Baoquan Chen b, Xinguo Liu a Corresponding author: cloudseawang@gmail.com
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Graphics. Automatic Efficient to compute Smooth Low-distortion Defined for every point Aligns semantic features. Other disciplines
 Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
A Bayesian Approach to Hybrid Image Retrieval
 A Bayesian Approach to Hybrid Image Retrieval Pradhee Tandon and C. V. Jawahar Center for Visual Information Technology International Institute of Information Technology Hyderabad - 500032, INDIA {pradhee@research.,jawahar@}iiit.ac.in
A Bayesian Approach to Hybrid Image Retrieval Pradhee Tandon and C. V. Jawahar Center for Visual Information Technology International Institute of Information Technology Hyderabad - 500032, INDIA {pradhee@research.,jawahar@}iiit.ac.in
Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces
 Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces Haibin Huang, Evangelos Kalogerakis, Benjamin Marlin University of Massachusetts Amherst Given an input 3D shape
Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces Haibin Huang, Evangelos Kalogerakis, Benjamin Marlin University of Massachusetts Amherst Given an input 3D shape
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors
 Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Co-Hierarchical Analysis of Shape Structures
 Co-Hierarchical Analysis of Shape Structures Oliver van Kaick Kai Xu Hao Zhang Yanzhen Wang Shuyang Sun Ariel Shamir Simon Fraser Univ. HPCL, Nat. Univ. of Defense Tech. Interdisciplinary Center Daniel
Co-Hierarchical Analysis of Shape Structures Oliver van Kaick Kai Xu Hao Zhang Yanzhen Wang Shuyang Sun Ariel Shamir Simon Fraser Univ. HPCL, Nat. Univ. of Defense Tech. Interdisciplinary Center Daniel
SHED: Shape Edit Distance for Fine-grained Shape Similarity
 SHED: Shape Edit Distance for Fine-grained Shape Similarity Yanir Kleiman 1 Oliver van Kaick 1,2 Olga Sorkine-Hornung 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 ETH Zurich Abstract
SHED: Shape Edit Distance for Fine-grained Shape Similarity Yanir Kleiman 1 Oliver van Kaick 1,2 Olga Sorkine-Hornung 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 ETH Zurich Abstract
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
A STUDY OF THE PERFORMANCE TRADEOFFS OF A TRADE ARCHIVE
 A STUDY OF THE PERFORMANCE TRADEOFFS OF A TRADE ARCHIVE CS737 PROJECT REPORT Anurag Gupta David Goldman Han-Yin Chen {anurag, goldman, han-yin}@cs.wisc.edu Computer Sciences Department University of Wisconsin,
A STUDY OF THE PERFORMANCE TRADEOFFS OF A TRADE ARCHIVE CS737 PROJECT REPORT Anurag Gupta David Goldman Han-Yin Chen {anurag, goldman, han-yin}@cs.wisc.edu Computer Sciences Department University of Wisconsin,
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling. Part I: User Studies on the Interface
 DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling (Supplemental Materials) Xiaoguang Han, Chang Gao, Yizhou Yu The University of Hong Kong Stage I: User experience
DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling (Supplemental Materials) Xiaoguang Han, Chang Gao, Yizhou Yu The University of Hong Kong Stage I: User experience
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Supplementary Material: Specular Highlight Removal in Facial Images
 Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Compu&ng Correspondences in Geometric Datasets. 4.2 Symmetry & Symmetriza/on
 Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Joint Shape Segmentation
 Joint Shape Segmentation Motivations Structural similarity of segmentations Extraneous geometric clues Single shape segmentation [Chen et al. 09] Joint shape segmentation [Huang et al. 11] Motivations
Joint Shape Segmentation Motivations Structural similarity of segmentations Extraneous geometric clues Single shape segmentation [Chen et al. 09] Joint shape segmentation [Huang et al. 11] Motivations
Learning Adversarial 3D Model Generation with 2D Image Enhancer
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Learning Adversarial 3D Model Generation with 2D Image Enhancer Jing Zhu, Jin Xie, Yi Fang NYU Multimedia and Visual Computing Lab
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Learning Adversarial 3D Model Generation with 2D Image Enhancer Jing Zhu, Jin Xie, Yi Fang NYU Multimedia and Visual Computing Lab
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
3D Printing Oriented Design: Geometry and Optimization
 3D Printing Oriented Design: Geometry and Optimization Siggraph Asia 2014 Course Dec. 5, 2014, Shenzhen Ligang Liu, Charlie Wang, Ariel Shamir, Emily Whiting Web: http://staff.ustc.edu.cn/~lgliu/courses/sigasia_2014_course_3dprinting/index.html
3D Printing Oriented Design: Geometry and Optimization Siggraph Asia 2014 Course Dec. 5, 2014, Shenzhen Ligang Liu, Charlie Wang, Ariel Shamir, Emily Whiting Web: http://staff.ustc.edu.cn/~lgliu/courses/sigasia_2014_course_3dprinting/index.html
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos
 Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Learning Probabilistic Models from Collections of 3D Meshes
 Learning Probabilistic Models from Collections of 3D Meshes Sid Chaudhuri, Steve Diverdi, Matthew Fisher, Pat Hanrahan, Vladimir Kim, Wilmot Li, Niloy Mitra, Daniel Ritchie, Manolis Savva, and Thomas Funkhouser
Learning Probabilistic Models from Collections of 3D Meshes Sid Chaudhuri, Steve Diverdi, Matthew Fisher, Pat Hanrahan, Vladimir Kim, Wilmot Li, Niloy Mitra, Daniel Ritchie, Manolis Savva, and Thomas Funkhouser
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Depth Estimation Using Collection of Models
 Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
How Much Logic Should Go in an FPGA Logic Block?
 How Much Logic Should Go in an FPGA Logic Block? Vaughn Betz and Jonathan Rose Department of Electrical and Computer Engineering, University of Toronto Toronto, Ontario, Canada M5S 3G4 {vaughn, jayar}@eecgutorontoca
How Much Logic Should Go in an FPGA Logic Block? Vaughn Betz and Jonathan Rose Department of Electrical and Computer Engineering, University of Toronto Toronto, Ontario, Canada M5S 3G4 {vaughn, jayar}@eecgutorontoca
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018
 CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
A Semantic Tree-Based Approach for Sketch-Based 3D Model Retrieval
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 A Semantic Tree-Based Approach for Sketch-Based 3D Model Retrieval Bo Li 1,2 1 School
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 A Semantic Tree-Based Approach for Sketch-Based 3D Model Retrieval Bo Li 1,2 1 School
Posture Invariant Surface Description and Feature Extraction
 Posture Invariant Surface Description and Feature Extraction Stefanie Wuhrer 1 Zouhour Ben Azouz 2 Chang Shu 1 Abstract We propose a posture invariant surface descriptor for triangular meshes. Using intrinsic
Posture Invariant Surface Description and Feature Extraction Stefanie Wuhrer 1 Zouhour Ben Azouz 2 Chang Shu 1 Abstract We propose a posture invariant surface descriptor for triangular meshes. Using intrinsic
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval
 Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES
 A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
Algorithms for 3D Isometric Shape Correspondence
 Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation
 Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation Thibault Napoléon Telecom Paris CNRS UMR 5141 75013 Paris, France napoleon@enst.fr Tomasz Adamek CDVP Dublin
Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation Thibault Napoléon Telecom Paris CNRS UMR 5141 75013 Paris, France napoleon@enst.fr Tomasz Adamek CDVP Dublin
Data driven 3D shape analysis and synthesis
 Data driven 3D shape analysis and synthesis Head Neck Torso Leg Tail Ear Evangelos Kalogerakis UMass Amherst 3D shapes for computer aided design Architecture Interior design 3D shapes for information visualization
Data driven 3D shape analysis and synthesis Head Neck Torso Leg Tail Ear Evangelos Kalogerakis UMass Amherst 3D shapes for computer aided design Architecture Interior design 3D shapes for information visualization
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Deformable Segmentation using Sparse Shape Representation. Shaoting Zhang
 Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
3D Pose Estimation using Synthetic Data over Monocular Depth Images
 3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
Prototype-based Intraclass Pose Recognition of Partial 3D Scans
 Prototype-based Intraclass Pose Recognition of Partial 3D Scans Jacob MONTIEL Hamid LAGA Masayuki NAKAJIMA Graduate School of Information Science and Engineering, Tokyo Institute of Technology Global Edge
Prototype-based Intraclass Pose Recognition of Partial 3D Scans Jacob MONTIEL Hamid LAGA Masayuki NAKAJIMA Graduate School of Information Science and Engineering, Tokyo Institute of Technology Global Edge
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Vehicle Dimensions Estimation Scheme Using AAM on Stereoscopic Video
 Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
Supplementary File: Dynamic Resource Allocation using Virtual Machines for Cloud Computing Environment
 IEEE TRANSACTION ON PARALLEL AND DISTRIBUTED SYSTEMS(TPDS), VOL. N, NO. N, MONTH YEAR 1 Supplementary File: Dynamic Resource Allocation using Virtual Machines for Cloud Computing Environment Zhen Xiao,
IEEE TRANSACTION ON PARALLEL AND DISTRIBUTED SYSTEMS(TPDS), VOL. N, NO. N, MONTH YEAR 1 Supplementary File: Dynamic Resource Allocation using Virtual Machines for Cloud Computing Environment Zhen Xiao,
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Towards Building Large-Scale Multimodal Knowledge Bases
 Towards Building Large-Scale Multimodal Knowledge Bases Dihong Gong Advised by Dr. Daisy Zhe Wang Knowledge Itself is Power --Francis Bacon Analytics Social Robotics Knowledge Graph Nodes Represent entities
Towards Building Large-Scale Multimodal Knowledge Bases Dihong Gong Advised by Dr. Daisy Zhe Wang Knowledge Itself is Power --Francis Bacon Analytics Social Robotics Knowledge Graph Nodes Represent entities
Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses
 Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses Stefanie Wuhrer Zouhour Ben Azouz Chang Shu National Research Council of Canada, Ottawa, Ontario, Canada {stefanie.wuhrer, zouhour.benazouz,
Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses Stefanie Wuhrer Zouhour Ben Azouz Chang Shu National Research Council of Canada, Ottawa, Ontario, Canada {stefanie.wuhrer, zouhour.benazouz,
Geometry Representations with Unsupervised Feature Learning
 Geometry Representations with Unsupervised Feature Learning Yeo-Jin Yoon 1, Alexander Lelidis 2, A. Cengiz Öztireli 3, Jung-Min Hwang 1, Markus Gross 3 and Soo-Mi Choi 1 1 Department of Computer Science
Geometry Representations with Unsupervised Feature Learning Yeo-Jin Yoon 1, Alexander Lelidis 2, A. Cengiz Öztireli 3, Jung-Min Hwang 1, Markus Gross 3 and Soo-Mi Choi 1 1 Department of Computer Science
An ICA based Approach for Complex Color Scene Text Binarization
 An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Exploration of Continuous Variability in Collections of 3D Shapes. (a) Input collection (b) Template deformation model (c) Constrained exploration
 Input collection (b) Template deformation model (c) Constrained exploration") Exploration of Continuous Variability in Collections of 3D Shapes Maks Ovsjanikov Wilmot Li Leonidas Guibas Niloy J. Mitra Stanford University Adobe Systems KAUST... (a) Input collection (b) Template deformation
Exploration of Continuous Variability in Collections of 3D Shapes Maks Ovsjanikov Wilmot Li Leonidas Guibas Niloy J. Mitra Stanford University Adobe Systems KAUST... (a) Input collection (b) Template deformation
Recurrent Transformer Networks for Semantic Correspondence
 Neural Information Processing Systems (NeurIPS) 2018 Recurrent Transformer Networks for Semantic Correspondence Seungryong Kim 1, Stepthen Lin 2, Sangryul Jeon 1, Dongbo Min 3, Kwanghoon Sohn 1 Dec. 05,
Neural Information Processing Systems (NeurIPS) 2018 Recurrent Transformer Networks for Semantic Correspondence Seungryong Kim 1, Stepthen Lin 2, Sangryul Jeon 1, Dongbo Min 3, Kwanghoon Sohn 1 Dec. 05,
Query Independent Scholarly Article Ranking
 Query Independent Scholarly Article Ranking Shuai Ma, Chen Gong, Renjun Hu, Dongsheng Luo, Chunming Hu, Jinpeng Huai SKLSDE Lab, Beihang University, China Beijing Advanced Innovation Center for Big Data
Query Independent Scholarly Article Ranking Shuai Ma, Chen Gong, Renjun Hu, Dongsheng Luo, Chunming Hu, Jinpeng Huai SKLSDE Lab, Beihang University, China Beijing Advanced Innovation Center for Big Data
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection
 Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
arxiv: v1 [cs.cv] 2 Nov 2018
![arxiv: v1 [cs.cv] 2 Nov 2018](/thumbs/89/100782143.jpg "arxiv: v1 [cs.cv] 2 Nov 2018") 3D Pick & Mix: Object Part Blending in Joint Shape and Image Manifolds Adrian Penate-Sanchez 1,2[0000 0003 2876 3301] Lourdes Agapito 1[0000 0002 6947 1092] arxiv:1811.01068v1 [cs.cv] 2 Nov 2018 1 University
3D Pick & Mix: Object Part Blending in Joint Shape and Image Manifolds Adrian Penate-Sanchez 1,2[0000 0003 2876 3301] Lourdes Agapito 1[0000 0002 6947 1092] arxiv:1811.01068v1 [cs.cv] 2 Nov 2018 1 University
A Comparative Study of Region Matching Based on Shape Descriptors for Coloring Hand-drawn Animation
 A Comparative Study of Region Matching Based on Shape Descriptors for Coloring Hand-drawn Animation Yoshihiro Kanamori University of Tsukuba Email: kanamori@cs.tsukuba.ac.jp Abstract The work of coloring
A Comparative Study of Region Matching Based on Shape Descriptors for Coloring Hand-drawn Animation Yoshihiro Kanamori University of Tsukuba Email: kanamori@cs.tsukuba.ac.jp Abstract The work of coloring
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild
 Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images
 A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images Karthik Ram K.V & Mahantesh K Department of Electronics and Communication Engineering, SJB Institute of Technology, Bangalore,
A Laplacian Based Novel Approach to Efficient Text Localization in Grayscale Images Karthik Ram K.V & Mahantesh K Department of Electronics and Communication Engineering, SJB Institute of Technology, Bangalore,
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
SOME stereo image-matching methods require a user-selected
 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 3, NO. 2, APRIL 2006 207 Seed Point Selection Method for Triangle Constrained Image Matching Propagation Qing Zhu, Bo Wu, and Zhi-Xiang Xu Abstract In order
IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 3, NO. 2, APRIL 2006 207 Seed Point Selection Method for Triangle Constrained Image Matching Propagation Qing Zhu, Bo Wu, and Zhi-Xiang Xu Abstract In order
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
... arxiv: v2 [cs.cv] 5 Sep Learning local shape descriptors from part correspondences with multi-view convolutional networks
![... arxiv: v2 [cs.cv] 5 Sep Learning local shape descriptors from part correspondences with multi-view convolutional networks](/thumbs/75/72009962.jpg "... arxiv: v2 [cs.cv] 5 Sep Learning local shape descriptors from part correspondences with multi-view convolutional networks") Learning local shape descriptors from part correspondences with multi-view convolutional networks HAIBIN HUANG, University of Massachusetts Amherst EVANGELOS KALOGERAKIS, University of Massachusetts Amherst
Learning local shape descriptors from part correspondences with multi-view convolutional networks HAIBIN HUANG, University of Massachusetts Amherst EVANGELOS KALOGERAKIS, University of Massachusetts Amherst
Query-Sensitive Similarity Measure for Content-Based Image Retrieval
 Query-Sensitive Similarity Measure for Content-Based Image Retrieval Zhi-Hua Zhou Hong-Bin Dai National Laboratory for Novel Software Technology Nanjing University, Nanjing 2193, China {zhouzh, daihb}@lamda.nju.edu.cn
Query-Sensitive Similarity Measure for Content-Based Image Retrieval Zhi-Hua Zhou Hong-Bin Dai National Laboratory for Novel Software Technology Nanjing University, Nanjing 2193, China {zhouzh, daihb}@lamda.nju.edu.cn
3D Object Classification using Shape Distributions and Deep Learning
 3D Object Classification using Shape Distributions and Deep Learning Melvin Low Stanford University mwlow@cs.stanford.edu Abstract This paper shows that the Absolute Angle shape distribution (AAD) feature
3D Object Classification using Shape Distributions and Deep Learning Melvin Low Stanford University mwlow@cs.stanford.edu Abstract This paper shows that the Absolute Angle shape distribution (AAD) feature
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D HAND LOCALIZATION BY LOW COST WEBCAMS
 3D HAND LOCALIZATION BY LOW COST WEBCAMS Cheng-Yuan Ko, Chung-Te Li, Chen-Han Chung, and Liang-Gee Chen DSP/IC Design Lab, Graduated Institute of Electronics Engineering National Taiwan University, Taiwan,
3D HAND LOCALIZATION BY LOW COST WEBCAMS Cheng-Yuan Ko, Chung-Te Li, Chen-Han Chung, and Liang-Gee Chen DSP/IC Design Lab, Graduated Institute of Electronics Engineering National Taiwan University, Taiwan,
Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011
 Zhang CS229, Stanford University December 11 th, 2011") Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011 1. Introduction Reddit is one of the most popular online social news websites with millions
Reddit Recommendation System Daniel Poon, Yu Wu, David (Qifan) Zhang CS229, Stanford University December 11 th, 2011 1. Introduction Reddit is one of the most popular online social news websites with millions
Partial Shape Matching using Transformation Parameter Similarity - Additional Material
 Volume xx (y), Number z, pp. 7 Partial Shape Matching using Transformation Parameter Similarity - Additional Material paper66. An Example for Local Contour Descriptors As mentioned in Section 4 of the
Volume xx (y), Number z, pp. 7 Partial Shape Matching using Transformation Parameter Similarity - Additional Material paper66. An Example for Local Contour Descriptors As mentioned in Section 4 of the
Recurring Part Arrangements in Shape Collections
 EUROGRAPHICS 2014 / B. Lévy and J. Kautz (Guest Editors) Volume 33 (2014), Number 2 Recurring Part Arrangements in Shape Collections Youyi Zheng 1 Daniel Cohen-Or 2 Melinos Averkiou 3 Niloy J. Mitra 3,1
EUROGRAPHICS 2014 / B. Lévy and J. Kautz (Guest Editors) Volume 33 (2014), Number 2 Recurring Part Arrangements in Shape Collections Youyi Zheng 1 Daniel Cohen-Or 2 Melinos Averkiou 3 Niloy J. Mitra 3,1
Minimum-Distortion Isometric Shape Correspondence Using EM Algorithm
 1 Minimum-Distortion Isometric Shape Correspondence Using EM Algorithm Yusuf Sahillioğlu and Yücel Yemez Abstract We present a purely isometric method that establishes 3D correspondence between two (nearly)
1 Minimum-Distortion Isometric Shape Correspondence Using EM Algorithm Yusuf Sahillioğlu and Yücel Yemez Abstract We present a purely isometric method that establishes 3D correspondence between two (nearly)
Localization of Sensor Networks II
 Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 2/3/09 Jie Gao CSE595-spring09 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory
Localization of Sensor Networks II Jie Gao Computer Science Department Stony Brook University 2/3/09 Jie Gao CSE595-spring09 1 Rigidity theory Given a set of rigid bars connected by hinges, rigidity theory