Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
|
|
|
- Elisabeth Johnson
- 5 years ago
- Views:
Transcription
1 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015

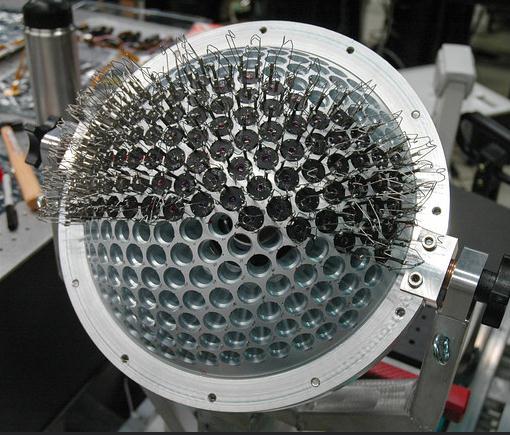
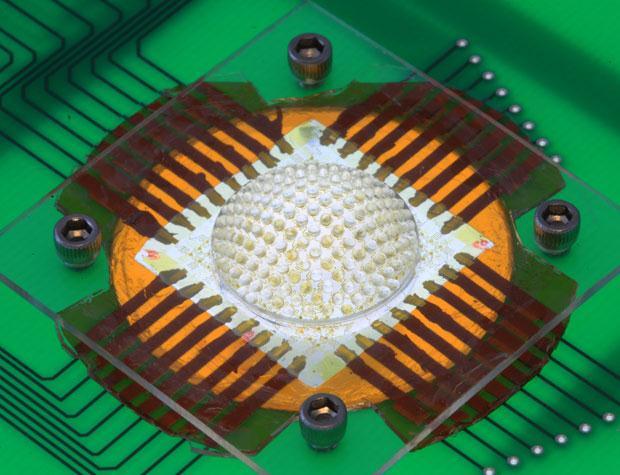
2 Eye of a Fly AWARE-2 Duke University
3 Insect-Eye Camera MAVs

4 Sony s Curved Sensor 2014


5 Canon s 250-megapixel camera sensor 09/08/15 Can read letters on an airplane 11 miles away!

6 Al Molnar, Cornell University John Wallace, LaserFocusWorld, 4/3/2012.

7 Al Molnar, Cornell University
8 Depth Imaging Original Goals Uses for: Military Defense Security and surveillance
9 Additional Uses of Depth Imaging Gestural Interfaces Cheap 3D scanners Motion capture Bio-metrics Face recognition Gait analysis Skeletonization Manipulating 3D models
10 Digital Geometry Capture Photographic methods Laser scanning Pattern projection methods Time of Flight

11 Camera Definition Camera View direction Model The camera location, view direction, and frustum must be defined relative to the object.
12 Viewing Frustum - User Parameters Location and Orientation (vectors): Eye location of eye point At a point along view direction vector Up a vector defining the Y axis on the hither plane fov Up Shape (scalars): Eye fov field of view angle aspect view plane aspect ratio hither perpendicular distance to hither plane yon perpendicular distance to yon plane hither yon At aspect = width / height
13 In general, what are the unknown variables? Unknown observe position- Xe, Ye, Ze Unknown viewer direction- Φ, θ, Ψ Unknown focal length- f
14 Simple case Known camera positions (x e, y e, z e ), camera optics, Identify corresponding points in each image. Jeremiah Fairbank. View dependent perspective images. Master's thesis, Cornell University, August 2005.

15 Early Work

16 Sagan House

17 1 2 3 Catch Autodesk

18 Autodesk s Remake 2016 Daan Claessen
19 Capturing Geometry from Photographs Can we reconstruct the 3D geometry from an arbitrary set of photographs?
20 Reconstructing Rome 1 The advent of digital photography and the recent growth of photo-sharing websites ( ) have brought about the seismic change in photography and the use of photo collections. 1 A search for the word Rome on returns two million photos. This collection, or others like it, capture every popular site, facade, statue, fountain, interior, café, etc.
21 Characteristics of Typical Photo Sets The photos are unstructured No particular order or distribution of camera viewpoints The photos are uncalibrated Nothing is known about the camera settings (exposure, focal length, etc.) The scale is enormous (millions, not thousands of photos) and We need to do this fast!

22 Correspondence and 3D Structure from Different Camera Positions Note: The pictures are in correspondence 2D dots with same color correspond to the same 3D points.

23 3D Structure from Different Camera Positions Camera 1 Camera 2 Camera 3
24 3D Structure from Different Camera Positions Camera 3 Camera 1 Camera 2 Assuming the position of the red dot is known, there is reprojection error in Camera 3.
25 Change the Problem to an optimization problem Minimize the sum of the squares of the reprojection errors. This non-linear least squares problem is difficult to solve due to local minima and maxima. Authors selectively started with a few choice cameras and points and grew scenes incrementally (a process known as bundle adjustment).

26 Trevi Fountain, Rome Italy

27 Feature Detection and Matching The position and orientation of scale-invariant feature transform (SIFT) features on an image of the Trevi Fountain. Sameer Agarwal, Yasutaka Furukawa, Naoh Snavely, Brian Curless, Steve M. Seitz, Richard Szeliski. Reconstructing Rome, IEEE Computer, June 2010.

28 Feature Detection and Matching A track corresponding to a point on the face of the central statue of Oceanus at the Trevi Fountain, the embodiment of a river encircling the world in Greek mythology. Sameer Agarwal, Yasutaka Furukawa, Naoh Snavely, Brian Curless, Steve M. Seitz, Richard Szeliski. Reconstructing Rome, IEEE Computer, June 2010.

29 Colosseum The Colosseum (Rome) Reconstructed dense 3D point models. For places with many available images, reconstruction quality is very high. Sameer Agarwal, Yasutaka Furukawa, Naoh Snavely, Brian Curless, Steve M. Seitz, Richard Szeliski. Reconstructing Rome, IEEE Computer, June 2010.

30 Cornell Campus, McGraw Hall - Noah Snavely
31 Digital Geometry Capture Photographic methods Laser scanning Pattern projection methods

32 Cyberware Scanner Diagram

33 Cyberware Scanner
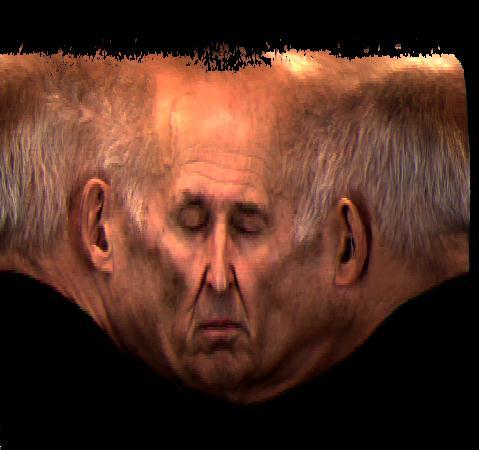
34 Uncle Don

35 Cyberware vs Catch
36 Digital Geometry Capture Photographic methods Laser scanning Pattern projection methods

37 Microsoft s Kinect Making Things See, Greg Borenstein

38 Structured Light Imaging (Kinect) Kinect uses a spatial pseudo random neighborhood pattern with unique coding with different sized dots.
 Small dots Middle region (1.2 2.0m) Far region (2.0 3.")
39 Kinect speckle pattern Near region ( m) Small dots Middle region ( m) Far region ( m) Large dots

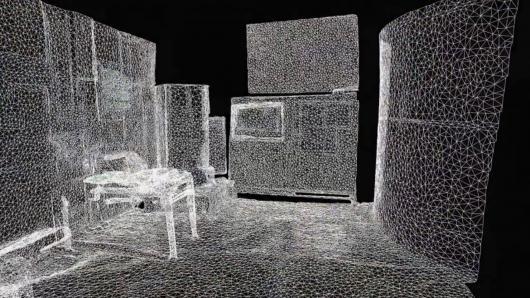
40 Point Cloud Drawn from the Kinect s 3D data

41 Depth Image The gray scale indicates the depth of the object for each pixel. Black indicates no depth information because closer objects obscure those that are further away.

42 Kinect: Depth Image and Real Image
43 Digital Geometry Capture Photographic methods Laser scanning Pattern projection methods Time of Flight
44 Pulsed Modulation
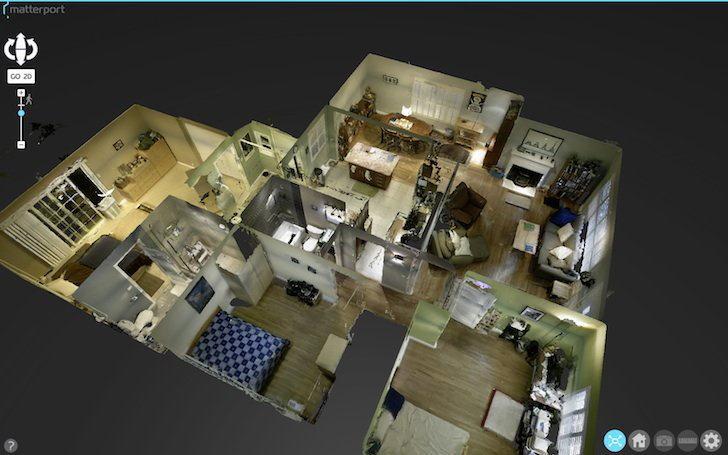
45 Matterport
46 Matterport

47 Matterport 2016

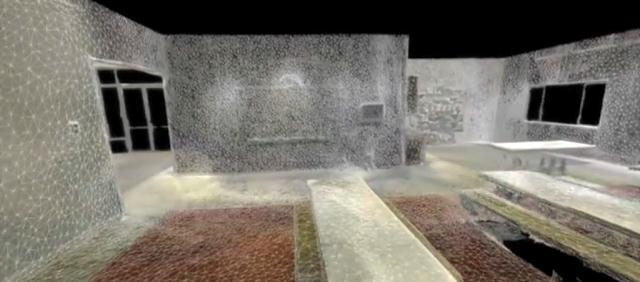
48 Matterport
49 Floored
50 end
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Sensors/Photography Geometry Capture Lecture #10 September 21, 2017 Donald P. Greenberg
 Visual Imaging in the Electronic Age Advanced Digital Sensors/Photography Geometry Capture Lecture #10 September 21, 2017 Donald P. Greenberg Digital Geometry Capture Photographic methods Laser scanning
Visual Imaging in the Electronic Age Advanced Digital Sensors/Photography Geometry Capture Lecture #10 September 21, 2017 Donald P. Greenberg Digital Geometry Capture Photographic methods Laser scanning
Amateur photography was once largely a personal RECONSTRUCTING ROME
 COVER FE ATURE RECONSTRUCTING ROME Sameer Agarwal and Yasutaka Furukawa, Google Noah Snavely, Cornell University Brian Curless, University of Washington Steven M. Seitz, Google and University of Washington
COVER FE ATURE RECONSTRUCTING ROME Sameer Agarwal and Yasutaka Furukawa, Google Noah Snavely, Cornell University Brian Curless, University of Washington Steven M. Seitz, Google and University of Washington
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture
 Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Introduction to Computer Vision. Srikumar Ramalingam School of Computing University of Utah
 Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg
 Visual Imaging in the Electronic Age Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg Google Street View Car Fleet October 15, 2012 Google s Autonomous
Visual Imaging in the Electronic Age Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg Google Street View Car Fleet October 15, 2012 Google s Autonomous
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
International Journal for Research in Applied Science & Engineering Technology (IJRASET) A Review: 3D Image Reconstruction From Multiple Images
 A Review: 3D Image Reconstruction From Multiple Images") A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
CS 4758: Automated Semantic Mapping of Environment
 CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Noah Snavely Steven M. Seitz. Richard Szeliski. University of Washington. Microsoft Research. Modified from authors slides
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
I N T R O D U C T I O N T O C O M P U T E R G R A P H I C S
 3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Models and The Viewing Pipeline. Jian Huang CS456
 Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D shape from the structure of pencils of planes and geometric constraints
 3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
lecture 10 - depth from blur, binocular stereo
 This lecture carries forward some of the topics from early in the course, namely defocus blur and binocular disparity. The main emphasis here will be on the information these cues carry about depth, rather
This lecture carries forward some of the topics from early in the course, namely defocus blur and binocular disparity. The main emphasis here will be on the information these cues carry about depth, rather
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project