Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
|
|
|
- Muriel Lamb
- 5 years ago
- Views:
Transcription
1 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known data to estimate values at unknown locations. For example, we want to resize an image of size pixels to pixels. To perform intensity-level assignment for any point in the overlay, we look for its closest pixel in the original image and assign its intensity to the new pixel in the grid. This method is called nearest neighbour interpolation. A more suitable approach is bilinear interpolation, in which we use the four nearest neighbours to estimate the intensity at a given location. Let ( xy, ) denote the coordinates of the location to which we want to assign an intensity value, and let vxy (, ) denote that intensity value. For bilinear interpolation, the assigned value is obtained using the equation vxy (, ) = ax+ by+ cxy+ d, (2.4-6) where the four coefficients are determined from the four equations in four unknowns that can be written using the four nearest neighbours of point ( xy, ). The next level of complexity is bicubic interpolation, which involves the sixteen nearest neighbours of a point: 3 3 i j vxy (, ) = aijxy, (2.4-7) i= 0j= 0

2 49 where the sixteen coefficients are determined from the sixteen equations in sixteen unknowns that can be written using the sixteen nearest neighbours of point ( xy, ). Example 2.4: Comparison of interpolation approaches for image shrinking and zooming. It is possible to use more neighbours in interpolation, and there are more complex techniques.
3 2.5 Some Basic Relationships between Pixels 50 Here, we consider some important relationships between pixels in a digital image. Neighbours of a Pixel A pixel p at coordinates ( xy, ) has four horizontal and vertical neighbours: ( x+ 1, y), ( x 1, y), ( xy, + 1), ( xy, 1). This set of pixels is called the 4-neighbuors of p, and denoted by N4( p ). The four diagonal neighbours of p are ( x+ 1, y+ 1), ( x+ 1, y 1), ( x 1, y+ 1), ( x 1, y 1), and are denoted by ND( p ). Adjacency, Connectivity, Regions, and Boundaries Let V be the set of intensity values used to define adjacency. In a binary image, V = { 1} if we are referring to adjacency of pixels with value 1. In a gray-scale image, set V typically contains more elements. For example, with a range of possible intensity values 0 to 255, set V could be any subset of these 256 values. Consider three types of adjacency: (a) 4-adjacency. Two pixels p and q with values from V are 4-adjacency if q is in the set N4( p ).
4 51 (b) (c) 8-adjacency. Two pixels p and q with values from V are 8-adjacency if q is in the set N8( p ). m-adjacency (mixed adjacency). Two pixels p and q with values from V are m -adjacency if (i) q is in the N4( p ), or (ii) q is in the ND( p) and the set N4( p) N4( q) has no pixels whose values are from V. Mixed adjacency is a modified of 8-adjacency. For example, consider the arrangement shown in Figure 2.25 (a) for V = { 1}. The three pixels at the top of Figure 2.25 (b) show ambiguous 8- adjacency, which is removed by using m-adjacency, as shown in Figure 2.25 (c).
5 52 A path from pixel p with coordinates ( xy, ) to pixel q with coordinates ( st, ) is a sequence of distinct pixels with coordinates ( x0, y0), ( x1, y1),, ( xn, yn), where ( x0, y0) = ( xy, ), ( xn, yn) = ( st, ), and pixels ( xi, y i) and ( xi 1, yi 1) are adjacent for 1 i n. n is the length of the path. If ( x0, y0) = ( xn, yn), the path is a closed path. We can define 4-, 8-, or m-paths depending on the type of adjacency. The path shown in Figure 2.25 (b) between the top right and bottom right points are 8-paths, and the path in Figure 2.25 (c) is an m-path. Let S represent a subset of pixels in an image. Two pixels p and q are said to be connected in S if there exists a path between them consisting entirely of pixels ins. If it only has one connected component, set S is called a connected set. Let R be a subset of pixels in an image. We call R a region of the image if R is a connected set. Two regions, R i and R j are said to be adjacent if their union forms a connected set. Regions that are not adjacent are said to be disjoint. The two regions (of 1s) in Figure 2.25 (d) are adjacent only if 8- adjacency is used. Suppose that an image contains K disjoint regions, R k, k= 1,2,..., K, and none of which touches the image border. Let R u denote the union of all the K regions, and let ( R u) c denote its complement. We call all the points in R u the foreground, and all the points in ( R u) c the background of the image.
6 53 The boundary (also called the border or contour) of a regionr is the set of points that are adjacent to points in the complement ofr. Again, we must specify the connectivity being used to define adjacency. For example, the point circled in Figure 2.25 (e) is not a member of the border of the 1-valued region if 4-connectivity is used between the region and its background. As a rule, adjacency between points in a region and its background is defined in terms of 8-adjacency to handle situations like above. The preceding definition is referred to as the inner border of the region to distinguish it from its outer border, which is the corresponding border in the background. This issue is important in the development of border-following algorithms. Such algorithms usually are formulated to follow the outer boundary in order to guarantee that the result will form a closed path. For example, the inner border of the 1-valued region in Figure 2.25 (f) is the region itself. If R happens to be an entire image, then its boundary is defined as the set of pixels in the first and last rows and columns of the image. This extra definition is required because an image has no neighbours beyond its border.
7 Distance Measures 54 For pixelsp, q, and z, with coordinates ( xy, ), ( st, ), and ( vw, ), D is a distance function or metric if (a) Dpq (, ) 0 ( Dpq (, ) = 0 iff p= q ) (b) Dpq (, ) = Dqp (, ), and (c) Dpz (, ) Dpq (, ) + Dqz (, ). The Euclidean distance between p and q is defined as 2 2 [ ] 1/2 De( pq, ) = ( x s) + ( y t). (2.5-1) The D4 distance (called the city-block distance) between p and q is defined as D4( pq, ) = x s + y t. (2.5-2) Example: the pixels with D 4 distance 2 from ( xy, ) form the following contours of constant distance: The pixels with D 4= 1 are the 4-neighbuors of ( xy, ).
8 55 The D8 distance (called the chessboard distance) between p and q is defined as D8( pq, ) = max( x s, y t ). (2.5-3) Example: the pixels with D 8 distance 2 from ( xy, ) form the following contours of constant distance: The pixels with D 8= 1 are the 8-neighbuors of ( xy, ).
9 An Introduction to the Mathematical Tools Used in Digital Image Processing Two principal objectives for this section: (1) to introduce the various mathematical tools we will use in the following chapters; (2) to develop a feel for how these tools are used by applying them to a variety of basic image processing tasks. Array versus Matrix Operations An array operation involving one or more images is carried out on a pixel-by-pixel basis. There are many situations in which operations between images are carried out using matrix theory. Consider the following 2 2 images: a a a a and b b b b The array product of these two images is a a b b a b a b, a21 a = 22 b 21 b 22 a21b21 a22b 22 while the matrix product is given by a a b b a b + a b a b + a b a21 a = 22 b 21 b 22 a21b11 + a22b21 a21b12 + a22b 22 We assume array operations throughout this course, unless stated otherwise.
10 Linear versus Nonlinear Operations 57 One of the most important classifications of an image processing method is whether it is linear or nonlinear. Consider a general operator, H, that produces an output image, gxy (, ), for a given input image, fxy (, ): H[ fxy (, )] = gxy (, ). (2.6-1) H is said to be a linear operator if [ (, ) + (, )] = [ (, )] + [ (, )] H af xy af xy ah f xy ah f xy i i j j i i j j = ag i i( xy, ) + ag j j( xy, ), (2.6-2) where a i, a j, fi( xy, ), and fj( xy, ) are arbitrary constants and images. As indicated in (2.6-2), the output of a linear operation due to the sum of two inputs is the same as performing the operation on the input individually and then summing the results. Example: a nonlinear operation. Consider the following two images for the max operation: f = and f 2 3 = , and we let a 1= 1 and a 2= 1. To test for linearity, we start with the left side of (2.6-2): max (1) + ( 1) = max =
11 Then, we work with the right side: (1)max + ( 1) max = 3 + ( 1)7 = The left and right sides of (2.6-2) are not equal in this case, so we have proved that in general the max operator is nonlinear. Arithmetic Operations The four arithmetic operations, which are array operations, are denoted as sxy (, ) = fxy (, ) + gxy (, ) dxy (, ) = fxy (, ) gxy (, ) pxy (, ) = fxy (, ) gxy (, ) vxy (, ) = fxy (, ) gxy (, ) (2.6-3) Example 2.5: Addition (averaging) of noisy images for noise reduction. Let gxy (, ) denote a corrupted image formed by the addition of noise, η ( xy, ), to a noiseless image fxy (, ): gxy (, ) = fxy (, ) + η( xy, ) (2.6-4) where η ( xy, ) is assumed to be uncorrelated with zero average value. The objective of the following procedure is to reduce the noise content by adding a set of noisy images, { gi( xy, )}. With the above assumption, it can be shown that if an image gxy (, ) is formed by averaging K different noisy images,
12 59 K 1 gxy (, ) = gi( xy, ), (2.6-5) K i = 1 then it follows that E{ gxy (, )} = fxy (, ), (2.6-6) and σ 1 =, (2.6-7) 2 2 g( xy, ) σ ( xy, ) K η where E{ gxy (, )} is the expected value of g, and 2 η( xy, ) 2 g( xy, ) σ and σ are the variances of g and η, all at coordinate ( xy, ). The standard deviation (square root of the variance) at any point in the average image is σ 1 = σ. (2.6-8) gxy (, ) ( xy, ) K η As K increases, (2.6-7) and (2.6-8) indicate that the variability of the pixel values at each location ( xy, ) decreases. This means that gxy (, ) approaches fxy (, ) as the number of noisy images used in the averaging process increases. Figure 2.26 shows results of averaging different number of noisy images to image of Galaxy Pair NGC 3314.


13 60 Example 2.6: Image subtraction for enhancing differences. A frequent application of image subtracting is in the enhancement of differences between images.

 where (, ) hxy, the mask, is an X-ray image of a region of a patient s")
14 61 As another illustration, we discuss an area of medical imaging called mask mode radiography. Consider image differences of the form gxy (, ) = fxy (, ) hxy (, ). (2.6-9) where (, ) hxy, the mask, is an X-ray image of a region of a patient s body captured by an intensified TV camera located opposite an X-ray source.
, times a shading function, hxy (, ): gxy (, ) = fxyhxy (, ) (, ).")
15 Example 2.7: Using image multiplication and division for shading correction. 62 An important application of image multiplication (and division) is shading correction. Suppose that an imaging sensor produces images that can be modeled as the product of a perfect image, fxy (, ), times a shading function, hxy (, ): gxy (, ) = fxyhxy (, ) (, ). If hxy (, ) is known, we can obtain fxy (, ) by fxy (, ) = gxy (, )/ hxy (, ). If hxy (, ) is not known, but access to the imaging system is possible, we can obtain an approximation to the shading function by imaging a target of constant intensity. Figure 2.29 shows an example of shading correction.
16 Set and Logical Operations Basic set operations 63 Let A be a set composed of ordered pairs of real numbers. If a= ( a1, a2) is an element of A, then we write a A (2.6-12) Similarly, if a is not an element of A, we write a A (2.6-13) The set with no elements is called the null or empty set and is denoted by the symbol. A set is specified by the contents of two braces: { i. For } example, an expression of the form C= { w w= dd, D} means that set C is the set of elements, w, such that w is formed by multiplying each of the elements of set D by 1. If every element of a set A is also an element of a setb, then A is said to be a subset of B, denoted as A B (2.6-14) The union of two sets A and B, denoted by C= A B (2.6-15) is the set of elements belonging to either A, B, or both.
17 64 Similarly, the intersection of two sets A and B, denoted by D= A B (2.6-16) is the set of elements belonging to both A and B. Two sets A and B are said to be disjoint or mutually exclusive if they have no common elements A B= (2.6-17) The set universe, U, is the set of all elements in a given application. The complement of a seta is the set of elements that are not ina : c A = { w w A} (2.6-18) The difference of two setsa and B, A B, is defined as A B= { w w Aw, B} = A B (2.6-19) c As an example, we would define difference operation: c A in terms of U and the set c A U A =
, where x and y are")
 ( xyz,, ) A}, which denotes the set of pixels of A whose intensities have")
18 65 Figure 2.31 illustrates the preceding concepts. Example 2.8: Set operations involving image intensities. Let the elements of a gray-scale image be represented by a set A whose elements are triplets of the form( xyz,, ), where x and y are special coordinates and z denoted intensity. We can define the complement of A as the set c A = {( xyk,, z) ( xyz,, ) A}, which denotes the set of pixels of A whose intensities have been subtracted from a constant K. The constant K is equal to 2 k 1, where k is the number of intensity bits used to represent z.
 ( xyz,, ) A} n This image is shown in Figure 2.")
 a Ab, B} z For example, assume A represents the")
19 66 Let A denote the 8-bit gray-scale image in Figure 2.32 (a). To form the negative of A using set operations, we can form c A = A = {( xy,,255 z) ( xyz,, ) A} n This image is shown in Figure 2.32 (b). The union of two gray-scale set A and B may be defined as the set A B= { max( ab, ) a Ab, B} z For example, assume A represents the image in Figure 2.32 (a), and let B denote an array of the same size as A, but in which all values of z are equal to 3 times the mean intensity, m, of the elements of A. Figure 2.32 (c) shows the result.

 The last row shows the XOR (exclusive OR) operation, which is the set of foreground pixels belonging to A or B, but not both.")
20 Logical operations 67 When dealing with binary images, it is common practice to refer to union, intersection, and complement as the OR, AND, and NOT logical operations. Figure 2.33 illustrates some logical operations. The fourth row of Figure 2.33 shows the result of operation that the set of foreground pixels belonging to A but not tob, which is the definition of set difference in A B= { w w Aw, B} = A B (2.6-19) The last row shows the XOR (exclusive OR) operation, which is the set of foreground pixels belonging to A or B, but not both. The three operators, OR, AND, and NOT, are functionally complete. c
 (2.")
21 Spatial Operators 68 Spatial operations are performed directly on the pixels of a given image. Single-pixel operations This is the simplest operation we perform on a digital image to alter the values of its individual pixels based on their intensity: s= Tz ( ) (2.6-20) where T is a transformation function, z is the intensity of a pixel in the original image, and s is the intensity of the corresponding pixel in the processed image. Neighbourhood operations Let S xy denote the set of coordinates of a neighbourhood centered on an arbitrary point ( xy, ) in an image, f. Neighbourhood processing generates a corresponding pixel at the same coordinates in an output image, g. The value of that pixel is determined by a specified operation involving the pixels ins xy.

 ( rc, ) S xy where r and c are the row and column coordinates")
22 69 Figure 2.35 shows a process performed in a neighbourhood of size m n, which can be expressed in equation form: 1 gxy (, ) = frc (, ) mn (2.6-21) ( rc, ) S xy where r and c are the row and column coordinates of the pixels whose coordinates are numbers of the set S xy.
23 Geometric spatial transformations and image registration 70 Geometric transformations modify the spatial relationship between pixels in an image. A geometric transformation consists of two basic operations: (1) a spatial transformation of coordinates, and (2) intensity interpolation that assigns intensity value to the spatially transformed pixels. The transformation of coordinates may be expressed as ( xy, ) = T{ ( vw, )} (2.6-22) where ( vw, ) are pixel coordinates in the original image and ( xy, ) are the corresponding pixel coordinates in the transformed image. For example, the transformation ( xy, ) = T{ ( vw, )} = ( v /2, w /2) shrinks the original image to half. One of the most commonly used spatial coordinate transform is the affine transform, which has the general form t 11 t12 0 xy 1 = vw 1 T= vw 1 t21 t22 0 t31 t32 1 [ ] [ ] [ ] (2.6-23) This transformation can scale, rotate, translate, or shear a set of coordinate points, depending on the value chosen for the elements of matrix T.
24 71 Table 2.2 illustrates the matrix values used to implement these transformations. In practice, we can use (2.6-23) in two basic ways. Forward mapping It consists of scanning the pixels of the input image and, at each location, ( vw, ), computing the spatial location, ( xy, ), of the corresponding pixel in the output image using (2.6-23) directly.

25 72 A problem with the forward mapping approach is that two or more pixels in the input image can be transformed to the same location in the output image. It is also possible that some output locations may not be assigned a pixel at all. Inverse mapping It scans the output pixel locations and, at each location,( xy, ), computes the corresponding location in the input image using 1 ( vw, ) = T ( xy, ) It then interpolates among the nearest input pixels to determine the intensity of the output pixel value. Example 2.9: Image rotation and intensity interpolation. Image registration is an important application of digital image processing used to align two or more images of the same scene. In image registration, we have the input and output images, but the specific transformation that produced the output image from the input generally is unknown. We need to estimate the transformation function and then use it to register the two images.
26 73 For example, it may be interest to align (register) two or more images taken at approximately the same time, but using different imaging systems. Or, the images were taken at different times using the same instrument. One of the principal approaches is to use tie points (control points), which are corresponding points whose locations are known precisely in the input and reference images (the images against which we want to register the input). There are numerous ways to select tie points, ranging from interactively selecting them to applying algorithms that attempt to detect these points automatically. The problem of estimating the transformation function is one of modeling. Suppose that we have a set of four tie points each in an input and a reference image. A simple model based on a bilinear approximation is given by and x= cv 1 + cw 2 + cvw 3 + c4 (2.6-24) y= cv 5 + cw 6 + cvw 7 + c8 (2.6-25) During the estimation phase, ( vw, ) and ( xy, ) are the coordinates of tie points in the input and reference images. Once we have the coefficients, (2.6-24) and (2.6-25) become our vehicle for transforming all the pixels in the input image to generate the desired new image. If the tie points were selected correctly, the new image should be registered with the reference image.

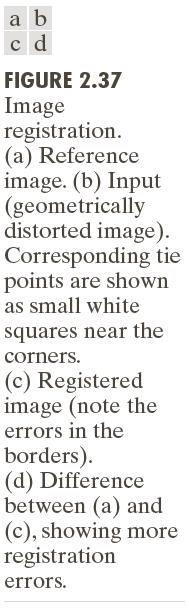
27 74 Example 2.10: Image registration.
 Tuv, can be expressed in the general form M 1N 1 Tuv (, ) = fxyrxyuv (, ) (,,, ) (2.")
28 Image Transforms 75 In some cases, image processing tasks are best formulated by transforming the input images, carrying the specified task in a transform domain, and applying the inverse transform to return to the spatial domain. A particularly important class of 2-D linear transforms, denoted by (, ) Tuv, can be expressed in the general form M 1N 1 Tuv (, ) = fxyrxyuv (, ) (,,, ) (2.6-30) x= 0y= 0 where fxy (, ) is the input image, and rxyuv (,,, ) is called the forward transformation kernel. Variable u and v are called the transform variables. Given Tuv (, ), we can recover fxy (, ) using the inverse transform of Tuv (, ) M 1N 1 fxy (, ) = Tuvsxyuv (, ) (,,, ) (2.6-31) u= 0v= 0 where sxyuv (,,, ) is called the inverse transformation kernel. Together, (2.6-30) and (2.6-31) are called a transform pair.
 r")
 The kernel is said to be symmetric if r1( xy, ) is functionally equal")
29 76 Example 2.11: Image processing in the transform domain. The forward transformation kernel is said to be separable if rxyuv (,,, ) r ( xur, ) ( yv, ) = 1 2 (2.6-32) The kernel is said to be symmetric if r1( xy, ) is functionally equal to r2( xy, ), so that rxyuv (,,, ) r ( xur, ) ( yv, ) = 1 1. (2.6-33)
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
Digital Image Fundamentals II
 Digital Image Fundamentals II 1. Image modeling and representations 2. Pixels and Pixel relations 3. Arithmetic operations of images 4. Image geometry operation 5. Image processing with Matlab - Image
Digital Image Fundamentals II 1. Image modeling and representations 2. Pixels and Pixel relations 3. Arithmetic operations of images 4. Image geometry operation 5. Image processing with Matlab - Image
Digital Image Processing
 Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Lecture 1 Introduction & Fundamentals
 Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Lecture 3 - Intensity transformation
 Computer Vision Lecture 3 - Intensity transformation Instructor: Ha Dai Duong duonghd@mta.edu.vn 22/09/2015 1 Today s class 1. Gray level transformations 2. Bit-plane slicing 3. Arithmetic/logic operators
Computer Vision Lecture 3 - Intensity transformation Instructor: Ha Dai Duong duonghd@mta.edu.vn 22/09/2015 1 Today s class 1. Gray level transformations 2. Bit-plane slicing 3. Arithmetic/logic operators
Topological structure of images
 Topological structure of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Use of simple relationships
Topological structure of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Use of simple relationships
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
Topological structure of images
 Topological structure of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Use of simple relationships between pixels The
Topological structure of images Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Use of simple relationships between pixels The
CoE4TN3 Medical Image Processing
 CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
ECE 178: Introduction (contd.)
") ECE 178: Introduction (contd.) Lecture Notes #2: January 9, 2002 Section 2.4 sampling and quantization Section 2.5 relationship between pixels, connectivity analysis Jan 9 W03/Lecture 2 1 Announcements
ECE 178: Introduction (contd.) Lecture Notes #2: January 9, 2002 Section 2.4 sampling and quantization Section 2.5 relationship between pixels, connectivity analysis Jan 9 W03/Lecture 2 1 Announcements
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
Digital Image Processing. Introduction
 Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 1 Image Enhancement in the Spatial Domain 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Unit structure : 3.0 Objectives 3.1 Introduction 3.2 Basic Grey Level Transform 3.3 Identity Transform Function 3.4 Image
1 Image Enhancement in the Spatial Domain 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Unit structure : 3.0 Objectives 3.1 Introduction 3.2 Basic Grey Level Transform 3.3 Identity Transform Function 3.4 Image
(Refer Slide Time: 0:38)
") Digital Image Processing. Professor P. K. Biswas. Department of Electronics and Electrical Communication Engineering. Indian Institute of Technology, Kharagpur. Lecture-37. Histogram Implementation-II.
Digital Image Processing. Professor P. K. Biswas. Department of Electronics and Electrical Communication Engineering. Indian Institute of Technology, Kharagpur. Lecture-37. Histogram Implementation-II.
Chapter - 2 : IMAGE ENHANCEMENT
 Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Segmentation algorithm for monochrome images generally are based on one of two basic properties of gray level values: discontinuity and similarity.
 Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Ulrik Söderström 17 Jan Image Processing. Introduction
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Digital Image Processing
 Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
Review for Exam I, EE552 2/2009
 Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
A.1 Numbers, Sets and Arithmetic
 522 APPENDIX A. MATHEMATICS FOUNDATIONS A.1 Numbers, Sets and Arithmetic Numbers started as a conceptual way to quantify count objects. Later, numbers were used to measure quantities that were extensive,
522 APPENDIX A. MATHEMATICS FOUNDATIONS A.1 Numbers, Sets and Arithmetic Numbers started as a conceptual way to quantify count objects. Later, numbers were used to measure quantities that were extensive,
 Get Free notes at Module-I One s Complement: Complement all the bits.i.e. makes all 1s as 0s and all 0s as 1s Two s Complement: One s complement+1 SIGNED BINARY NUMBERS Positive integers (including zero)
Get Free notes at Module-I One s Complement: Complement all the bits.i.e. makes all 1s as 0s and all 0s as 1s Two s Complement: One s complement+1 SIGNED BINARY NUMBERS Positive integers (including zero)
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
f(x,y) is the original image H is the degradation process (or function) n(x,y) represents noise g(x,y) is the obtained degraded image p q
 is the original image H is the degradation process (or function) n(x,y) represents noise g(x,y) is the obtained degraded image p q") Image Restoration Image Restoration G&W Chapter 5 5.1 The Degradation Model 5.2 5.105.10 browse through the contents 5.11 Geometric Transformations Goal: Reconstruct an image that has been degraded in
Image Restoration Image Restoration G&W Chapter 5 5.1 The Degradation Model 5.2 5.105.10 browse through the contents 5.11 Geometric Transformations Goal: Reconstruct an image that has been degraded in
Intensity Transformation and Spatial Filtering
 Intensity Transformation and Spatial Filtering Outline of the Lecture Introduction. Intensity Transformation Functions. Piecewise-Linear Transformation Functions. Introduction Definition: Image enhancement
Intensity Transformation and Spatial Filtering Outline of the Lecture Introduction. Intensity Transformation Functions. Piecewise-Linear Transformation Functions. Introduction Definition: Image enhancement
Chapter 18. Geometric Operations
 Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
CS 548: Computer Vision and Image Processing Digital Image Basics. Spring 2016 Dr. Michael J. Reale
 CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
SYDE 575: Introduction to Image Processing
 SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations I
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations I For students of HI 5323
morphology on binary images
 morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Arithmetic/Logic Operations. Prof. George Wolberg Dept. of Computer Science City College of New York
 Arithmetic/Logic Operations Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we describe arithmetic and logic operations commonly used in image processing.
Arithmetic/Logic Operations Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we describe arithmetic and logic operations commonly used in image processing.
Digital Image Processing
 Digital Image Processing Part 2: Image Enhancement in the Spatial Domain AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 3 2011-04-06 Contents
Digital Image Processing Part 2: Image Enhancement in the Spatial Domain AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 3 2011-04-06 Contents
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
PITSCO Math Individualized Prescriptive Lessons (IPLs)
") Orientation Integers 10-10 Orientation I 20-10 Speaking Math Define common math vocabulary. Explore the four basic operations and their solutions. Form equations and expressions. 20-20 Place Value Define
Orientation Integers 10-10 Orientation I 20-10 Speaking Math Define common math vocabulary. Explore the four basic operations and their solutions. Form equations and expressions. 20-20 Place Value Define
PetShop (BYU Students, SIGGRAPH 2006)
") Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
LESSON 1: INTRODUCTION TO COUNTING
 LESSON 1: INTRODUCTION TO COUNTING Counting problems usually refer to problems whose question begins with How many. Some of these problems may be very simple, others quite difficult. Throughout this course
LESSON 1: INTRODUCTION TO COUNTING Counting problems usually refer to problems whose question begins with How many. Some of these problems may be very simple, others quite difficult. Throughout this course
Perspective Projection Transformation
 Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN
 UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN Spatial domain methods Spatial domain refers to the image plane itself, and approaches in this category are based on direct manipulation of pixels in an image.
UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN Spatial domain methods Spatial domain refers to the image plane itself, and approaches in this category are based on direct manipulation of pixels in an image.
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
x' = c 1 x + c 2 y + c 3 xy + c 4 y' = c 5 x + c 6 y + c 7 xy + c 8
 1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Subpixel Corner Detection Using Spatial Moment 1)
") Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
Relational Database: The Relational Data Model; Operations on Database Relations
 Relational Database: The Relational Data Model; Operations on Database Relations Greg Plaxton Theory in Programming Practice, Spring 2005 Department of Computer Science University of Texas at Austin Overview
Relational Database: The Relational Data Model; Operations on Database Relations Greg Plaxton Theory in Programming Practice, Spring 2005 Department of Computer Science University of Texas at Austin Overview
International Journal of Advance Engineering and Research Development. Applications of Set Theory in Digital Image Processing
 Scientific Journal of Impact Factor (SJIF): 4.72 International Journal of Advance Engineering and Research Development Volume 4, Issue 11, November -2017 Applications of Set Theory in Digital Image Processing
Scientific Journal of Impact Factor (SJIF): 4.72 International Journal of Advance Engineering and Research Development Volume 4, Issue 11, November -2017 Applications of Set Theory in Digital Image Processing
Digital Image Processing
 Digital Image Processing Intensity Transformations (Point Processing) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Intensity Transformations
Digital Image Processing Intensity Transformations (Point Processing) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Intensity Transformations
CoE4TN4 Image Processing. Chapter 5 Image Restoration and Reconstruction
 CoE4TN4 Image Processing Chapter 5 Image Restoration and Reconstruction Image Restoration Similar to image enhancement, the ultimate goal of restoration techniques is to improve an image Restoration: a
CoE4TN4 Image Processing Chapter 5 Image Restoration and Reconstruction Image Restoration Similar to image enhancement, the ultimate goal of restoration techniques is to improve an image Restoration: a
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Mapping Common Core State Standard Clusters and. Ohio Grade Level Indicator. Grade 5 Mathematics
 Mapping Common Core State Clusters and Ohio s Grade Level Indicators: Grade 5 Mathematics Operations and Algebraic Thinking: Write and interpret numerical expressions. Operations and Algebraic Thinking:
Mapping Common Core State Clusters and Ohio s Grade Level Indicators: Grade 5 Mathematics Operations and Algebraic Thinking: Write and interpret numerical expressions. Operations and Algebraic Thinking:
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Multidimensional Data and Modelling
 Multidimensional Data and Modelling 1 Problems of multidimensional data structures l multidimensional (md-data or spatial) data and their implementation of operations between objects (spatial data practically
Multidimensional Data and Modelling 1 Problems of multidimensional data structures l multidimensional (md-data or spatial) data and their implementation of operations between objects (spatial data practically
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Intensity Transformations and Spatial Filtering
 77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
Math 7 Glossary Terms
 Math 7 Glossary Terms Absolute Value Absolute value is the distance, or number of units, a number is from zero. Distance is always a positive value; therefore, absolute value is always a positive value.
Math 7 Glossary Terms Absolute Value Absolute value is the distance, or number of units, a number is from zero. Distance is always a positive value; therefore, absolute value is always a positive value.
Digital Image Procesing
 Digital Image Procesing Spatial Filters in Image Processing DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON Spatial filters for image enhancement Spatial filters
Digital Image Procesing Spatial Filters in Image Processing DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON Spatial filters for image enhancement Spatial filters
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
ECE 470: Homework 5. Due Tuesday, October 27 in Seth Hutchinson. Luke A. Wendt
 ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Raster model. Alexandre Gonçalves, DECivil, IST
 Raster model 1. Resolution 2. Values and data types 3. Storage 4. Fitting rasters 5. Map algebra 6. Interpolation 7. Conversion vector raster 8. Vector vs. raster 1 Raster model Divides the space into
Raster model 1. Resolution 2. Values and data types 3. Storage 4. Fitting rasters 5. Map algebra 6. Interpolation 7. Conversion vector raster 8. Vector vs. raster 1 Raster model Divides the space into
HMMT February 2018 February 10, 2018
 HMMT February 2018 February 10, 2018 Combinatorics 1. Consider a 2 3 grid where each entry is one of 0, 1, and 2. For how many such grids is the sum of the numbers in every row and in every column a multiple
HMMT February 2018 February 10, 2018 Combinatorics 1. Consider a 2 3 grid where each entry is one of 0, 1, and 2. For how many such grids is the sum of the numbers in every row and in every column a multiple
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Binary Shape Characterization using Morphological Boundary Class Distribution Functions
 Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane?
 Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Chapter 3 Image Enhancement in the Spatial Domain
 Chapter 3 Image Enhancement in the Spatial Domain Yinghua He School o Computer Science and Technology Tianjin University Image enhancement approaches Spatial domain image plane itsel Spatial domain methods
Chapter 3 Image Enhancement in the Spatial Domain Yinghua He School o Computer Science and Technology Tianjin University Image enhancement approaches Spatial domain image plane itsel Spatial domain methods
Middle School Math Course 2
 Middle School Math Course 2 Correlation of the ALEKS course Middle School Math Course 2 to the Indiana Academic Standards for Mathematics Grade 7 (2014) 1: NUMBER SENSE = ALEKS course topic that addresses
Middle School Math Course 2 Correlation of the ALEKS course Middle School Math Course 2 to the Indiana Academic Standards for Mathematics Grade 7 (2014) 1: NUMBER SENSE = ALEKS course topic that addresses
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
Euclidean Space. Definition 1 (Euclidean Space) A Euclidean space is a finite-dimensional vector space over the reals R, with an inner product,.
 A Euclidean space is a finite-dimensional vector space over the reals R, with an inner product,.") Definition 1 () A Euclidean space is a finite-dimensional vector space over the reals R, with an inner product,. 1 Inner Product Definition 2 (Inner Product) An inner product, on a real vector space X
Definition 1 () A Euclidean space is a finite-dimensional vector space over the reals R, with an inner product,. 1 Inner Product Definition 2 (Inner Product) An inner product, on a real vector space X
Histograms. h(r k ) = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image
 = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image") Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create