V-Sentinel: A Novel Framework for Situational Awareness and Surveillance
|
|
|
- Vincent Richards
- 5 years ago
- Views:
Transcription
1 V-Sentinel: A Novel Framework for Situational Awareness and Surveillance Suya You Integrated Media Systems Center Computer Science Department University of Southern California March
2 Objective Developing advanced approaches for situational awareness, assessment, and response support to security and military applications Fusion: integrating information from varied sensors and resources to represent the spatial relationships and dynamic activities of the real-world Interpretation: enhancing the ability to bring out obscure critical features and disambiguating conflicting data interpretations Presentation: presenting and visualizing the data in innovative ways to maximize information extraction and understanding 2




3 Problem Statement We already have the capability to access to a multitude of systems which provide content-rich information from many different sensors and resources Problem, analyzing and visualizing them as separate streams/windows provides no integration of information, no high-level scene comprehension, and leads to overwhelm users 3
 Situational")

4 Problem Statement (con.) Situational awareness, assessment, and response supports 4
5 A Simple Example (1) Separate streams/windows presentation Visualization as separate streams provides no integration of information, no high-level scene comprehension, and obstructs collaboration 5
6 A Simple Example (2) Imagine if we scale the scenario to a sensor network delivering dozens of data streams from ground-based sensors, UAVs, satellites, and mobile sensors distributed through a scene 6

7 A Simple Example (3) Separate streams aiding with geospatial information captures only a snapshot of the real world, therefore lacks any representation of dynamic events and activities occurring in the scene

8 A Simple Example (4) Simply combining the separate aerial photograph, geospatial model, and ground videos still provides limited situational awareness Human visual system is not capable of fusing and comprehending multiple independently viewpoints of a scene 8




9 Proposed Solution Visualizing all data in a single 3D context rapid scene comprehension and understanding rapid assessment and reaction 9
10 V-Sentinel: Dynamic Fusion of Multi-Sensor Data A 3D environment model is used as substrate and augmented with the images to create an Augmented Virtual Environment (AVE) presenting all the data in a common 3D context to maximize collaboration and comprehension of the big picture - a world in miniature a coherent human-cognitive framework - allowing users to easily understand relationships and switch focus between levels of detail and specific spatial or temporal aspects of the data addressing dynamic visualization and change detection - allowing dynamic images, events, and movements captured in imagery to be visualized and interpreted from arbitrary viewpoints 10
11 Architecture of V-Sentinel System 11




12 Main Components and Functionalities 3D scene modeling from LiDAR Dynamic object modeling from Imagery Sensor tracking & calibration Fusion of imagery and 3D model Real-time rendering and visualization Immersive and user interaction 12
 Accuracy Rapid Low cost")

13 Main Components - 3D Scene Modeling (Substrate) Accuracy Rapid Low cost LiDAR, Imagery, Stereo 3D model of entire USC campus and surround areas 13

 Hybrid GPS/INS/vision tracking approach GPS/INS data serve as an")

14 Main Components Sensor Modeling (Tracking) Accurate sensor information for image projection and fusion (where am I, and where am I looking?) Hybrid GPS/INS/vision tracking approach GPS/INS data serve as an aid to the vision tracking by reducing search space and provide tolerance to interruptions Vision corrects for drift and error accumulation Complementary fusion filter Extended Kalman Filter framework 14


15 Main Components Imagery Fusion and Projection Video Projection vs. Texture Map dynamic vs. static texture image and position both change each video frame 3D model image texture 15



16 Dynamic Imagery Projectors Update sensor pose and image to paint the scene each frame Compute projection transformation during rendering of each frame Dynamic control during visualization session to reflect most recent information Real-time possible 16
 Object")

17 Main Components Dynamic Object Analysis Image analysis: automatic detecting moving events & objects (people, vehicles) Object modeling: rapid creation of 3D object model Visualization: render a dynamic scene representation in real-time Ground A Image Plane B v n C Model 17



18 Dynamic Modeling Examples 18

 can control view via joystick, keyboard, or")
19 Put Things Together Scene Modeling System - Models from Lidar - semi-automated - Building finding and extraction Dynamic Event Modeling System - Detection and tracking of moving objects - Rapid 3D creation of the object models Data Acquisition System - Accessing internet video streams at real-time - XML interface communications with other sensor modules Fusion and Rendering System - Real-time GPU code on dual CPU PC - Immersive visualization supports arbitrary display size and resolution (up to 1920x1200) GUI and Interaction System - Interactive GUI and remote control via XML interface for integration with existing sensor networks and monitoring systems - Local and/or remote user(s) can control view via joystick, keyboard, or mouse 19
20 Sample Application Scenario (1) Video surveillance Six surveillance cameras are deployed for situational awareness of a building complex of USC campus Networking and XML interface communicate with the sensors and the system System monitors and automatically changes viewpoint to alarms, geo-referenced positions, or arbitrary viewpoints Patrol mode automatically flies user-defined paths over the entire site 20
21 USC Camera Views 21

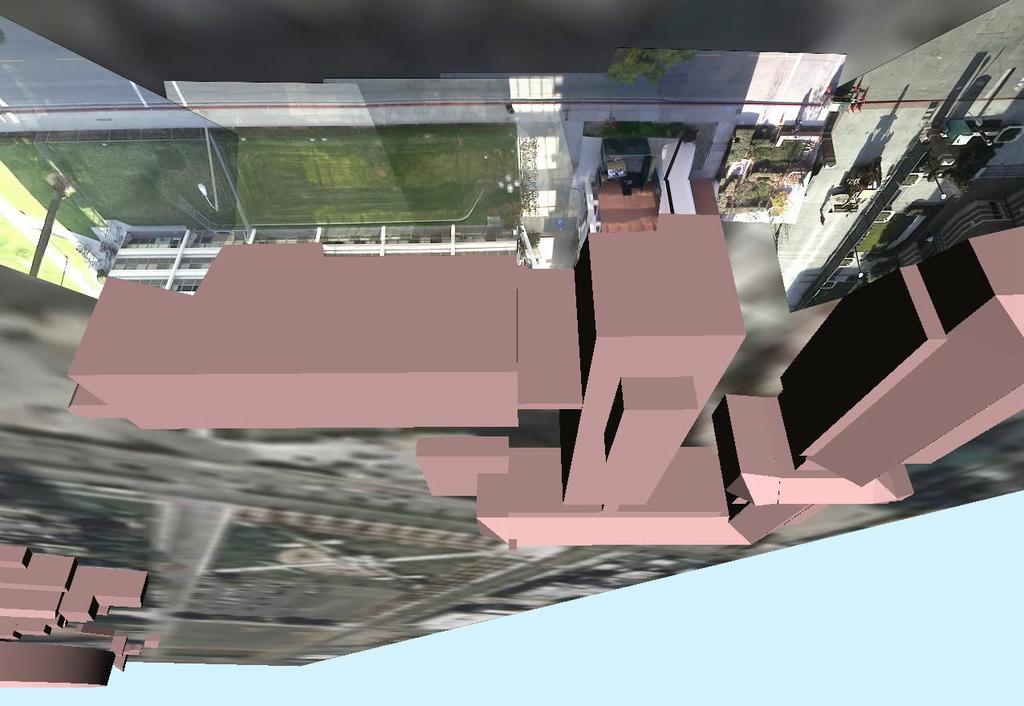
22 V-Sentinel View USC Campus 22
")
23 V-Sentinel View (navigate to arbitrary viewpoint) 23
")
24 V-Sentinel View (respond to alarm) 24
, an Army funded Training Research")

25 Sample Application Scenario (2) Simulation and training Collaborating with the Institute for Creative Technologies (ICT), an Army funded Training Research Center at USC Post-analysis of a live training exercise captured for AVE analysis/playback Rapid training exercise re-mapping ARMY MOUT Village Training Site 25

26 V-Sentinel Views - MOUT Village Site Live scenario videos are projected onto the 3D model of the MOUT Village Army training site to rapidly create a live training exercise 26
27 Acknowledgements Members of CGIT/IMSC/USC US Army, ONR, NGA, and industrial partners 27
Modeling and Visualization
 Modeling and Visualization 1. Research Team Project Leader: Other Faculty: Graduate Students: Industrial Partner(s): Prof. Ulrich Neumann, IMSC and Computer Science Prof. Suya You, IMSC and Computer Science
Modeling and Visualization 1. Research Team Project Leader: Other Faculty: Graduate Students: Industrial Partner(s): Prof. Ulrich Neumann, IMSC and Computer Science Prof. Suya You, IMSC and Computer Science
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Hydra Fusion Tools. Capabilities Guide. Real-time 3D Reconstructions
 Hydra Fusion Tools Capabilities Guide Real-time 3D Reconstructions Hydra Fusion Tools Building a Mapping System Flying an unmanned aircraft system (UAS) is no longer a stand-alone activity. Operators are
Hydra Fusion Tools Capabilities Guide Real-time 3D Reconstructions Hydra Fusion Tools Building a Mapping System Flying an unmanned aircraft system (UAS) is no longer a stand-alone activity. Operators are
HYDRA FUSION TOOLS CAPABILITIES GUIDE REAL-TIME 3D RECONSTRUCTIONS
 HYDRA FUSION TOOLS CAPABILITIES GUIDE REAL-TIME 3D RECONSTRUCTIONS HYDRA FUSION TOOLS BUILDING A MAPPING SYSTEM Flying an unmanned aircraft system (UAS) is no longer a stand-alone activity. Operators are
HYDRA FUSION TOOLS CAPABILITIES GUIDE REAL-TIME 3D RECONSTRUCTIONS HYDRA FUSION TOOLS BUILDING A MAPPING SYSTEM Flying an unmanned aircraft system (UAS) is no longer a stand-alone activity. Operators are
Motion and Target Tracking (Overview) Suya You. Integrated Media Systems Center Computer Science Department University of Southern California
 Suya You. Integrated Media Systems Center Computer Science Department University of Southern California") Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
GEOMEDIA MOTION VIDEO ANALYSIS PROFESSIONAL
 GEOMEDIA MOTION VIDEO ANALYSIS PROFESSIONAL GEOMEDIA MOTION VIDEO ANALYSIS PROFESSIONAL Hexagon Geospatial s GeoMedia Motion Video Analysis Professional provides a high-productivity environment for analysis
GEOMEDIA MOTION VIDEO ANALYSIS PROFESSIONAL GEOMEDIA MOTION VIDEO ANALYSIS PROFESSIONAL Hexagon Geospatial s GeoMedia Motion Video Analysis Professional provides a high-productivity environment for analysis
Camera Calibration for a Robust Omni-directional Photogrammetry System
 Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Extending a Defense Computing Cloud to Warfighters at the Edge
 Extending a Defense Computing Cloud to Warfighters at the Edge Thermopylae Sciences and Technology Abstract The Department of Defense (DoD) has historically adopted innovation from the commercial tech
Extending a Defense Computing Cloud to Warfighters at the Edge Thermopylae Sciences and Technology Abstract The Department of Defense (DoD) has historically adopted innovation from the commercial tech
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
The Feature Analyst Extension for ERDAS IMAGINE
 The Feature Analyst Extension for ERDAS IMAGINE Automated Feature Extraction Software for GIS Database Maintenance We put the information in GIS SM A Visual Learning Systems, Inc. White Paper September
The Feature Analyst Extension for ERDAS IMAGINE Automated Feature Extraction Software for GIS Database Maintenance We put the information in GIS SM A Visual Learning Systems, Inc. White Paper September
Pervasive Computing. OpenLab Jan 14 04pm L Institute of Networked and Embedded Systems
 Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
IMAGINE EXPANSION PACK Extend the Power of ERDAS IMAGINE
 IMAGINE EXPANSION PACK Extend the Power of ERDAS IMAGINE IMAGINE EXPANSION PACK IMAGINE Expansion Pack is a collection of functionality to extend the utility of ERDAS IMAGINE. It includes 3D visualization
IMAGINE EXPANSION PACK Extend the Power of ERDAS IMAGINE IMAGINE EXPANSION PACK IMAGINE Expansion Pack is a collection of functionality to extend the utility of ERDAS IMAGINE. It includes 3D visualization
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Acadia II Product Guide. Low-Power, Low-Latency Video Processing for Enhanced Vision in Any Condition
 Acadia II Product Guide Low-Power, Low-Latency Video Processing for Enhanced Vision in Any Condition The Acadia II SoC is a state-of-the-art solution for integrated vision processing. Built around advanced
Acadia II Product Guide Low-Power, Low-Latency Video Processing for Enhanced Vision in Any Condition The Acadia II SoC is a state-of-the-art solution for integrated vision processing. Built around advanced
What s New in ecognition 9.0. Christian Weise
 What s New in ecognition 9.0 Christian Weise Presenting ecognition 9 Release Date: March 2014 Who s eligible? All user with a valid ecognition maintenance contract Presenting ecognition 9 ecognition version
What s New in ecognition 9.0 Christian Weise Presenting ecognition 9 Release Date: March 2014 Who s eligible? All user with a valid ecognition maintenance contract Presenting ecognition 9 ecognition version
AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE
 AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE Stephen Se a, *, Pezhman Firoozfam a, Norman Goldstein a, Melanie Dutkiewicz a, Paul Pace b a MDA Systems Ltd., 13800 Commerce Parkway,
AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE Stephen Se a, *, Pezhman Firoozfam a, Norman Goldstein a, Melanie Dutkiewicz a, Paul Pace b a MDA Systems Ltd., 13800 Commerce Parkway,
TrueOrtho with 3D Feature Extraction
 TrueOrtho with 3D Feature Extraction PCI Geomatics has entered into a partnership with IAVO to distribute its 3D Feature Extraction (3DFE) software. This software package compliments the TrueOrtho workflow
TrueOrtho with 3D Feature Extraction PCI Geomatics has entered into a partnership with IAVO to distribute its 3D Feature Extraction (3DFE) software. This software package compliments the TrueOrtho workflow
IMAGINE Objective. The Future of Feature Extraction, Update & Change Mapping
 IMAGINE ive The Future of Feature Extraction, Update & Change Mapping IMAGINE ive provides object based multi-scale image classification and feature extraction capabilities to reliably build and maintain
IMAGINE ive The Future of Feature Extraction, Update & Change Mapping IMAGINE ive provides object based multi-scale image classification and feature extraction capabilities to reliably build and maintain
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
The Most Comprehensive Solution for Indoor Mapping Applications
 The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Digital Defence LiDAR based Smart 3D Geospatial Intelligence for Smart Defence
 www. geokno.com Digital Defence LiDAR based Smart 3D Geospatial Intelligence for Smart Defence Presentation Agenda About Geokno About LiDAR Technology LiDAR Products for Security Forces Development uses
www. geokno.com Digital Defence LiDAR based Smart 3D Geospatial Intelligence for Smart Defence Presentation Agenda About Geokno About LiDAR Technology LiDAR Products for Security Forces Development uses
3D in the ArcGIS Platform. Chris Andrews
 3D in the ArcGIS Platform Chris Andrews Geospatial 3D is already all around us 3D is expanding the GIS community s opportunity to provide value 3D City & Infrastructure Models Generated 3D features Photogrammetrc
3D in the ArcGIS Platform Chris Andrews Geospatial 3D is already all around us 3D is expanding the GIS community s opportunity to provide value 3D City & Infrastructure Models Generated 3D features Photogrammetrc
IMAGERY FOR ARCGIS. Manage and Understand Your Imagery. Credit: Image courtesy of DigitalGlobe
 IMAGERY FOR ARCGIS Manage and Understand Your Imagery Credit: Image courtesy of DigitalGlobe 2 ARCGIS IS AN IMAGERY PLATFORM Empowering you to make informed decisions from imagery and remotely sensed data
IMAGERY FOR ARCGIS Manage and Understand Your Imagery Credit: Image courtesy of DigitalGlobe 2 ARCGIS IS AN IMAGERY PLATFORM Empowering you to make informed decisions from imagery and remotely sensed data
V-PANE Virtual Perspectives Augmenting Natural Experiences
 V-PANE Virtual Perspectives Augmenting Natural Experiences GTC 2017 The views, opinions and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views
V-PANE Virtual Perspectives Augmenting Natural Experiences GTC 2017 The views, opinions and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
REPORT DOCUMENTATION PAGE
 REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
REPORT DOCUMENTATION PAGE Form Approved OMB NO. 0704-0188 The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions,
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Rapid Geo-Image Communications for Disaster Management
 Rapid Geo-Image Communications for Disaster Management Harald Skinnemoen President and Founder, AnsuR Technologies, Norway harald.skinnemoen@ansur.no Einar Bjørgo Head, Rapid Mapping, Applications and
Rapid Geo-Image Communications for Disaster Management Harald Skinnemoen President and Founder, AnsuR Technologies, Norway harald.skinnemoen@ansur.no Einar Bjørgo Head, Rapid Mapping, Applications and
Information management, needs assessment, mapping
 Information management, needs assessment, mapping WHY WAS REACH CREATED? REACH WAS CREATED IN RESPONSE TO TWO CRITICAL GAPS IN THE HUMANITARIAN SYSTEM 1 2 GAPS BETWEEN THE SUPPLY AND DEMAND OF HUMANITARIAN
Information management, needs assessment, mapping WHY WAS REACH CREATED? REACH WAS CREATED IN RESPONSE TO TWO CRITICAL GAPS IN THE HUMANITARIAN SYSTEM 1 2 GAPS BETWEEN THE SUPPLY AND DEMAND OF HUMANITARIAN
CommonSENSE: Software for displaying Full Motion Video for mission-critical C4ISR working positions
 CommonSENSE: Software for displaying Full Motion Video for mission-critical C4ISR working positions Jeff Malacarne Barco Defense & Aerospace Abstract This paper presents an overview of Barco s CommonSENSE
CommonSENSE: Software for displaying Full Motion Video for mission-critical C4ISR working positions Jeff Malacarne Barco Defense & Aerospace Abstract This paper presents an overview of Barco s CommonSENSE
Semi-Automated and Interactive Construction of 3D Urban Terrains
 Semi-Automated and Interactive Construction of 3D Urban Terrains Tony Wasilewski *, Nickolas Faust, and William Ribarsky Center for GIS and Spatial Analysis Technologies Graphics, Visualization, and Usability
Semi-Automated and Interactive Construction of 3D Urban Terrains Tony Wasilewski *, Nickolas Faust, and William Ribarsky Center for GIS and Spatial Analysis Technologies Graphics, Visualization, and Usability
Enhancing photogrammetric 3d city models with procedural modeling techniques for urban planning support
 IOP Conference Series: Earth and Environmental Science OPEN ACCESS Enhancing photogrammetric 3d city models with procedural modeling techniques for urban planning support To cite this article: S Schubiger-Banz
IOP Conference Series: Earth and Environmental Science OPEN ACCESS Enhancing photogrammetric 3d city models with procedural modeling techniques for urban planning support To cite this article: S Schubiger-Banz
Virtual Testbeds for Planetary Exploration: The Self Localization Aspect
 Virtual Testbeds for Planetary Exploration: The Self Localization Aspect, RWTH Aachen University Björn Sondermann Markus Emde Jürgen Roßmann 1 Content Previous Work Self Localization in terrestrial forestry
Virtual Testbeds for Planetary Exploration: The Self Localization Aspect, RWTH Aachen University Björn Sondermann Markus Emde Jürgen Roßmann 1 Content Previous Work Self Localization in terrestrial forestry
SkylineGlobe 6.5 s New Developments
 SkylineGlobe 6.5 s New Developments The SkylineGlobe Enterprise suite of applications was created to provide all of the necessary software tools for an organization to implement their own private, 3D virtual
SkylineGlobe 6.5 s New Developments The SkylineGlobe Enterprise suite of applications was created to provide all of the necessary software tools for an organization to implement their own private, 3D virtual
What s New in ecognition 9.0
 What s New in ecognition 9.0 Dr. Waldemar Krebs tranforming data into GIS ready information Trends in Earth Observation Increasing need for detailed, up-to-date information as a basis for planning and
What s New in ecognition 9.0 Dr. Waldemar Krebs tranforming data into GIS ready information Trends in Earth Observation Increasing need for detailed, up-to-date information as a basis for planning and
GeoDec: A Framework to Effectively Visualize and Query Geospatial Data for Decision-Making
 GeoDec: A Framework to Effectively Visualize and Query Geospatial Data for Decision-Making Cyrus Shahabi, Farnoush Banaei Kashani, Ali Khoshgozaran and Songhua Xing Information Laboratory (InfoLab) Computer
GeoDec: A Framework to Effectively Visualize and Query Geospatial Data for Decision-Making Cyrus Shahabi, Farnoush Banaei Kashani, Ali Khoshgozaran and Songhua Xing Information Laboratory (InfoLab) Computer
Prof. Feng Liu. Spring /27/2014
 Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
PanoMOBI: Panoramic Mobile Entertainment System
 PanoMOBI: Panoramic Mobile Entertainment System Barnabas Takacs 1,2 1 MTA SZTAKI, Virtual Human Interface Group, Hungarian Academy of Sciences, Kende u. 11-13, 1111 Budapest, Hungary 2 Digital Elite Inc.
PanoMOBI: Panoramic Mobile Entertainment System Barnabas Takacs 1,2 1 MTA SZTAKI, Virtual Human Interface Group, Hungarian Academy of Sciences, Kende u. 11-13, 1111 Budapest, Hungary 2 Digital Elite Inc.
Augmenting Reality with Projected Interactive Displays
 Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
STARTING WITH DRONES. Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS
 STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
Mission Aware Cybersecurity
 Mission Aware Cybersecurity Cody Fleming (UVA) Scott Lucero (OSD) Peter Beling, Barry Horowitz (UVA), Calk Elks (VCU) October 2016 1 Systems Engineering Research Center (SERC) Overview DoD and the Intelligence
Mission Aware Cybersecurity Cody Fleming (UVA) Scott Lucero (OSD) Peter Beling, Barry Horowitz (UVA), Calk Elks (VCU) October 2016 1 Systems Engineering Research Center (SERC) Overview DoD and the Intelligence
Designing a Self-Calibrating Pipeline for Projection Mapping Application. Kevin Wright Kevin Moule
 Designing a Self-Calibrating Pipeline for Projection Mapping Application Kevin Wright Kevin Moule 2 Who we are Kevin Wright Director of the Application Software group at Christie responsible for developing
Designing a Self-Calibrating Pipeline for Projection Mapping Application Kevin Wright Kevin Moule 2 Who we are Kevin Wright Director of the Application Software group at Christie responsible for developing
Advanced IP solutions enabling the autonomous driving revolution
 Advanced IP solutions enabling the autonomous driving revolution Chris Turner Director, Emerging Technology & Strategy, Embedded & Automotive Arm Shanghai, Beijing, Shenzhen Arm Tech Symposia 2017 Agenda
Advanced IP solutions enabling the autonomous driving revolution Chris Turner Director, Emerging Technology & Strategy, Embedded & Automotive Arm Shanghai, Beijing, Shenzhen Arm Tech Symposia 2017 Agenda
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
ossimplanet Users Manual
 ossimplanet OSX documentation ossimplanet Users Manual An accurate 3D Global Visualization System Version 0.2 25 Jan 2007 Overview ossimplanet is an accurate 3D global geo-spatial viewer that is build
ossimplanet OSX documentation ossimplanet Users Manual An accurate 3D Global Visualization System Version 0.2 25 Jan 2007 Overview ossimplanet is an accurate 3D global geo-spatial viewer that is build
Computer Vision on Tegra K1. Chen Sagiv SagivTech Ltd.
 Computer Vision on Tegra K1 Chen Sagiv SagivTech Ltd. Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer Vision What we do: - Technology - Solutions - Projects
Computer Vision on Tegra K1 Chen Sagiv SagivTech Ltd. Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer Vision What we do: - Technology - Solutions - Projects
From Multi-sensor Data to 3D Reconstruction of Earth Surface: Innovative, Powerful Methods for Geoscience and Other Applications
 From Multi-sensor Data to 3D Reconstruction of Earth Surface: Innovative, Powerful Methods for Geoscience and Other Applications Bea Csatho, Toni Schenk*, Taehun Yoon* and Michael Sheridan, Department
From Multi-sensor Data to 3D Reconstruction of Earth Surface: Innovative, Powerful Methods for Geoscience and Other Applications Bea Csatho, Toni Schenk*, Taehun Yoon* and Michael Sheridan, Department
Aerial Visual Intelligence for GIS
 Aerial Visual Intelligence for GIS Devon Humphrey Geospatial Consultant copyright 2013 waypoint mapping LLC 1 Just a few definitions (Pop quiz at the end of presentation...) Unmanned Aerial wing or rotor
Aerial Visual Intelligence for GIS Devon Humphrey Geospatial Consultant copyright 2013 waypoint mapping LLC 1 Just a few definitions (Pop quiz at the end of presentation...) Unmanned Aerial wing or rotor
Hyperspectral Remote Sensing in Acquisition of Geospatial Information for the Modern Warfare. Dr M R Bhutiyani,
 Hyperspectral Remote Sensing in Acquisition of Geospatial Information for the Modern Warfare Dr M R Bhutiyani, Ex-Director, DTRL, New Delhi Chairman, ISRS, Delhi Chapter Air photo-interpretation Multi-spectral
Hyperspectral Remote Sensing in Acquisition of Geospatial Information for the Modern Warfare Dr M R Bhutiyani, Ex-Director, DTRL, New Delhi Chairman, ISRS, Delhi Chapter Air photo-interpretation Multi-spectral
Space and Naval Warfare Systems Center Atlantic Information Warfare Research Project (IWRP)
") Space and Naval Warfare Systems Center Atlantic Information Warfare Research Project (IWRP) SSC Atlantic is part of the Naval Research & Development Establishment (NR&DE) Information Warfare Research Project
Space and Naval Warfare Systems Center Atlantic Information Warfare Research Project (IWRP) SSC Atlantic is part of the Naval Research & Development Establishment (NR&DE) Information Warfare Research Project
Perspective Sensing for Inertial Stabilization
 Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
SecuRescue. Michael HOFSTÄTTER
 SecuRescue Michael HOFSTÄTTER SECURESCUE Real-time Situation Awareness for First Responders in Disaster and Crisis Operations Michael Hofstätter Project Coordinator SecuRescue has been funded by the Austrian
SecuRescue Michael HOFSTÄTTER SECURESCUE Real-time Situation Awareness for First Responders in Disaster and Crisis Operations Michael Hofstätter Project Coordinator SecuRescue has been funded by the Austrian
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Training i Course Remote Sensing Basic Theory & Image Processing Methods September 2011
 Training i Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Geometric Operations Michiel Damen (September 2011) damen@itc.nl ITC FACULTY OF GEO-INFORMATION SCIENCE AND
Training i Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Geometric Operations Michiel Damen (September 2011) damen@itc.nl ITC FACULTY OF GEO-INFORMATION SCIENCE AND
Algorithms for Image-Based Rendering with an Application to Driving Simulation
 Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
GIS Data Collection. This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues.
 9 GIS Data Collection OVERVIEW This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues. It distinguishes between primary (direct measurement)
9 GIS Data Collection OVERVIEW This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues. It distinguishes between primary (direct measurement)
SENSEI-Panama Visualizing animal movement data on a virtual island in cave2. Jillian Aurisano and James Hwang June 29, 2016
 SENSEI-Panama Visualizing animal movement data on a virtual island in cave2 Jillian Aurisano and James Hwang June 29, 2016 Context Sensei (SENSor Environment Imaging) is an EVL NSF grant to capture omnidirectional,
SENSEI-Panama Visualizing animal movement data on a virtual island in cave2 Jillian Aurisano and James Hwang June 29, 2016 Context Sensei (SENSor Environment Imaging) is an EVL NSF grant to capture omnidirectional,
3D Optics (including Photogrammetry)
") To: USDOT/RITA research team members From: C. Brooks, D. Evans CC: P. Hannon Date: October 15 th, 2010 Number: 07 Re: Work plans progress to date The following summarizes the work plans associated with
To: USDOT/RITA research team members From: C. Brooks, D. Evans CC: P. Hannon Date: October 15 th, 2010 Number: 07 Re: Work plans progress to date The following summarizes the work plans associated with
ossimplanet Users Manual
 ossimplanet Users Manual An accurate 3D Global Visualization System Version 0.1 16 Oct 2006 Overview ossimplanet is an accurate 3D global geo-spatial viewer that is build on top of the OSSIM, OpenSceneGraph,
ossimplanet Users Manual An accurate 3D Global Visualization System Version 0.1 16 Oct 2006 Overview ossimplanet is an accurate 3D global geo-spatial viewer that is build on top of the OSSIM, OpenSceneGraph,
Company Capabilities Briefing November 2011
 Company Capabilities Briefing November 2011 Heidi Jacobus heidi@cybernet.com Cybernet Systems Corporation 727 Airport Blvd Ann Arbor, Michigan 48108 www.cybernet.com (734) 668-2567 www.cybernet.com Nov
Company Capabilities Briefing November 2011 Heidi Jacobus heidi@cybernet.com Cybernet Systems Corporation 727 Airport Blvd Ann Arbor, Michigan 48108 www.cybernet.com (734) 668-2567 www.cybernet.com Nov
Sheaf Theory: The Mathematics of Data Fusion
 Sheaf Theory: The Mathematics of Data Fusion SIMPLEX Program 2015 This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License. Acknowledgements Reza
Sheaf Theory: The Mathematics of Data Fusion SIMPLEX Program 2015 This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License. Acknowledgements Reza
Geospatial Intelligence Centres Empowered by Airbus
 DEFENCE AND SPACE Intelligence Geospatial Intelligence Centres Empowered by Airbus Planning Collection Processing Analysis Dissemination 2 Geospatial Intelligence Centres Geospatial Intelligence Centres
DEFENCE AND SPACE Intelligence Geospatial Intelligence Centres Empowered by Airbus Planning Collection Processing Analysis Dissemination 2 Geospatial Intelligence Centres Geospatial Intelligence Centres
Huawei Emergency Command Network Solution Brochure-Detailed
 Doc. Code Huawei Emergency Command Solution Brochure-Detailed Issue V1.0 Date 2012-09-21 Huawei Technologies Co., Ltd. Huawei Emergency Command Solution 1 Background Emergency command is used to control
Doc. Code Huawei Emergency Command Solution Brochure-Detailed Issue V1.0 Date 2012-09-21 Huawei Technologies Co., Ltd. Huawei Emergency Command Solution 1 Background Emergency command is used to control
Creating outstanding digital cockpits with Qt Automotive Suite
 Creating outstanding digital cockpits with Qt Automotive Suite Get your digital cockpit first the finish line with Qt. Embedded World 2017 Trends in cockpit digitalization require a new approach to user
Creating outstanding digital cockpits with Qt Automotive Suite Get your digital cockpit first the finish line with Qt. Embedded World 2017 Trends in cockpit digitalization require a new approach to user
Geometry of Aerial photogrammetry. Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization)
") Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Exelis Visual Information Software Solutions for TERRAIN ANALYSIS. Defense & Intelligence SOLUTIONS GUIDE.
 Exelis Visual Information for TERRAIN ANALYSIS Defense & Intelligence SOLUTIONS GUIDE www.exelisvis.com MISSION SUCCESS The U.S. Armed Forces has long acknowledged the connection between battlefield terrain
Exelis Visual Information for TERRAIN ANALYSIS Defense & Intelligence SOLUTIONS GUIDE www.exelisvis.com MISSION SUCCESS The U.S. Armed Forces has long acknowledged the connection between battlefield terrain
ABSTRACT 1. INTRODUCTION
 Published in SPIE Proceedings, Vol.3084, 1997, p 336-343 Computer 3-d site model generation based on aerial images Sergei Y. Zheltov, Yuri B. Blokhinov, Alexander A. Stepanov, Sergei V. Skryabin, Alexander
Published in SPIE Proceedings, Vol.3084, 1997, p 336-343 Computer 3-d site model generation based on aerial images Sergei Y. Zheltov, Yuri B. Blokhinov, Alexander A. Stepanov, Sergei V. Skryabin, Alexander
Visible and Long-Wave Infrared Image Fusion Schemes for Situational. Awareness
 Visible and Long-Wave Infrared Image Fusion Schemes for Situational Awareness Multi-Dimensional Digital Signal Processing Literature Survey Nathaniel Walker The University of Texas at Austin nathaniel.walker@baesystems.com
Visible and Long-Wave Infrared Image Fusion Schemes for Situational Awareness Multi-Dimensional Digital Signal Processing Literature Survey Nathaniel Walker The University of Texas at Austin nathaniel.walker@baesystems.com
National Science Foundation Engineering Research Center. Bingcai Zhang BAE Systems San Diego, CA
 Bingcai Zhang BAE Systems San Diego, CA 92127 Bingcai.zhang@BAESystems.com Introduction It is a trivial task for a five-year-old child to recognize and name an object such as a car, house or building.
Bingcai Zhang BAE Systems San Diego, CA 92127 Bingcai.zhang@BAESystems.com Introduction It is a trivial task for a five-year-old child to recognize and name an object such as a car, house or building.
5/14/2018. Experiences with AR and AI in development projects. Agenda. By: Sune Wolff, CTO & Partner at Unity Studios.
 Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
Positional tracking for VR/AR using Stereo Vision. Edwin AZZAM, CTO Stereolabs
 Positional tracking for VR/AR using Stereo Vision Edwin AZZAM, CTO Stereolabs Outside-in Positional Tracking Lighthouse laser system HTC Vive IR LED constellation tracking system Oculus Rift ifixit Inside-out
Positional tracking for VR/AR using Stereo Vision Edwin AZZAM, CTO Stereolabs Outside-in Positional Tracking Lighthouse laser system HTC Vive IR LED constellation tracking system Oculus Rift ifixit Inside-out
Slide 1. Bentley Descartes V8i. Presented by: Inga Morozoff, Bentley
 Slide 1 Bentley Descartes V8i Presented by: Inga Morozoff, Bentley Slide 2 Agenda What is Bentley Descartes? Where is it used? Features Benefits Live demo Questions and Answers 2 WWW.BENTLEY.COM Slide
Slide 1 Bentley Descartes V8i Presented by: Inga Morozoff, Bentley Slide 2 Agenda What is Bentley Descartes? Where is it used? Features Benefits Live demo Questions and Answers 2 WWW.BENTLEY.COM Slide
Computer Vision: Reconstruction, Recognition, and Interaction
 Computer Vision: Reconstruction, Recognition, and Interaction Linda G. Shapiro Department of Computer Science and Engineering University of Washington 1 3 OUTLINE Reconstruction - Kari Pulli s Reconstruction
Computer Vision: Reconstruction, Recognition, and Interaction Linda G. Shapiro Department of Computer Science and Engineering University of Washington 1 3 OUTLINE Reconstruction - Kari Pulli s Reconstruction
Reality Modeling Webinar
 Reality Modeling Webinar Leveraging 3D Reality Meshes for Real-Time Asset Management and Monitoring What is Reality Modeling? Images & video? What is Reality Modeling? Images & video As-built drawings
Reality Modeling Webinar Leveraging 3D Reality Meshes for Real-Time Asset Management and Monitoring What is Reality Modeling? Images & video? What is Reality Modeling? Images & video As-built drawings
Unmanned Vehicle Technology Researches for Outdoor Environments. *Ju-Jang Lee 1)
") Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Building Great Situational Awareness Apps Using ArcGIS Developer Tools. Kerry Robinson Eric Bader Thomas Solow
 Building Great Situational Awareness Apps Using ArcGIS Developer Tools Kerry Robinson Eric Bader Thomas Solow Agenda Situational Awareness in ArcGIS Developing apps in connected environments - ArcGIS Enterprise
Building Great Situational Awareness Apps Using ArcGIS Developer Tools Kerry Robinson Eric Bader Thomas Solow Agenda Situational Awareness in ArcGIS Developing apps in connected environments - ArcGIS Enterprise
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
3D MAPPING FORUM. Introduction to Modeling and Simulation in Real-Time 3D ArcGIS. Morakot Pilouk, Ph.D. Senior Software Developer/Consultant
 3D MAPPING FORUM Introduction to Modeling and Simulation in Real-Time 3D ArcGIS Morakot Pilouk, Ph.D. Senior Software Developer/Consultant Source: http://en.memory-alpha.wikia.com/wiki/holodeck Source:
3D MAPPING FORUM Introduction to Modeling and Simulation in Real-Time 3D ArcGIS Morakot Pilouk, Ph.D. Senior Software Developer/Consultant Source: http://en.memory-alpha.wikia.com/wiki/holodeck Source:
ABSTRACT 1. INTRODUCTION
 3D visualization for improved manipulation and mobility in EOD and combat engineering applications Joel Alberts, John Edwards, Josh Johnston, Jeff Ferrin Autonomous Solutions, Inc. 990 North 8000 West,
3D visualization for improved manipulation and mobility in EOD and combat engineering applications Joel Alberts, John Edwards, Josh Johnston, Jeff Ferrin Autonomous Solutions, Inc. 990 North 8000 West,
Online Interactive 4D Character Animation
 Online Interactive 4D Character Animation Marco Volino, Peng Huang and Adrian Hilton Web3D 2015 Outline 4D Performance Capture - 3D Reconstruction, Alignment, Texture Maps Animation - Parametric Motion
Online Interactive 4D Character Animation Marco Volino, Peng Huang and Adrian Hilton Web3D 2015 Outline 4D Performance Capture - 3D Reconstruction, Alignment, Texture Maps Animation - Parametric Motion
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
EPRI Research Overview IT/Security Focus. Power Delivery & Energy Utilization Sector From Generator Bus Bar to End Use
 EPRI Research Overview IT/Security Focus November 29, 2012 Mark McGranaghan VP, Power Delivery and Utilization Power Delivery & Energy Utilization Sector From Generator Bus Bar to End Use Transmission
EPRI Research Overview IT/Security Focus November 29, 2012 Mark McGranaghan VP, Power Delivery and Utilization Power Delivery & Energy Utilization Sector From Generator Bus Bar to End Use Transmission
Jamison R. Daniel, Benjamın Hernandez, C.E. Thomas Jr, Steve L. Kelley, Paul G. Jones, Chris Chinnock
 Jamison R. Daniel, Benjamın Hernandez, C.E. Thomas Jr, Steve L. Kelley, Paul G. Jones, Chris Chinnock Third Dimension Technologies Stereo Displays & Applications January 29, 2018 Electronic Imaging 2018
Jamison R. Daniel, Benjamın Hernandez, C.E. Thomas Jr, Steve L. Kelley, Paul G. Jones, Chris Chinnock Third Dimension Technologies Stereo Displays & Applications January 29, 2018 Electronic Imaging 2018
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Real world data collecting tools. Company Introduction. C2L equipment.co,.ltd
 Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
Arbitrary cut planes Slab control with slab thickness Projection plane adjustment Box cropping Mandible detection MPR cross-section linked views
 Provides unparalleled quality and performance no need to sacrifice one for the other Enables high fidelity viewing with interactive deep supersampling Requires no GPUs or hardware accelerators a true,
Provides unparalleled quality and performance no need to sacrifice one for the other Enables high fidelity viewing with interactive deep supersampling Requires no GPUs or hardware accelerators a true,
Maximizing GPU Power for Vision and Depth Sensor Processing. From NVIDIA's Tegra K1 to GPUs on the Cloud. Chen Sagiv Eri Rubin SagivTech Ltd.
 Maximizing GPU Power for Vision and Depth Sensor Processing From NVIDIA's Tegra K1 to GPUs on the Cloud Chen Sagiv Eri Rubin SagivTech Ltd. Today s Talk Mobile Revolution Mobile Cloud Concept 3D Imaging
Maximizing GPU Power for Vision and Depth Sensor Processing From NVIDIA's Tegra K1 to GPUs on the Cloud Chen Sagiv Eri Rubin SagivTech Ltd. Today s Talk Mobile Revolution Mobile Cloud Concept 3D Imaging