Haptic Sculpting of Volumetric Implicit Functions
|
|
|
- Lionel Gardner
- 5 years ago
- Views:
Transcription
1 Haptc Sculptng of Volumetrc Implct Functons Jng Hua Hong Qn Department of Computer Scence State Unversty of ew York at Stony Brook Stony Brook, Y , U.S.A. {jnghua qn}@cs.sunysb.edu Abstract Implct functons characterzed by the zero-set of polynomal-based algebrac equatons and other commonly-used analytc equatons are extremely powerful n graphcs, geometrc desgn, and vsualzaton. But the potental of mplct functons s yet to be fully realzed due to the lack of flexble and nteractve desgn technques. Ths paper presents a haptc sculptng system founded upon scalar trvarate B-splne functons. All the solds sculpted n our envronment are sem-algebrac sets of volumetrc mplct functons. We develop a large varety of sculptng toolkts equpped wth an ntutve haptc nterface to facltate the drect manpulaton of mplct functons n real-tme. To facltate multresoluton edtng and dfferent levels of detals, we employ three technques: herarchcal B-splnes, CSG-based functonal composton, and knot nserton. Our experments demonstrate that our algorthms and haptcs-based technques can greatly overcome the elng dffcultes assocated wth mplct functons. The novel elng technques and ther haptcs-based desgn prncple are extensble to the desgn of arbtrary mplct functons. Keywords: Geometrc Modelng, B-splnes, Implct Functon, Volume Sculptng, Marchng Cubes Renderng, Haptc Interface.. Introducton and Motvaton The effcency and flexblty of shape elng are vtal to the success of graphcs, geometrc desgn, and vrtual envronments. Despte the prevalence of parametrc forms n vsual computng felds, the tradtonal representaton of geometrc enttes such as commonlyused analytc shapes comes from mplct functons because of many of ther attractve propertes []. It can be shown that the set of mplct algebrac surfaces or solds s actually larger than that of ratonal parametrc surfaces or solds. Ths set s also closed under certan geometrc operatons. Every ratonal parametrc curve/surface/sold can be represented by an mplct algebrac equaton, but not vce versa [3]. In contrast wth parametrc forms, mplct functons have a number of advantages such as pont classfcaton, ntersecton computaton, unbounded geometry. Consder polynomal-based algebrac equatons for example, the smplest form for mplct functons s the power bass expresson of degree n j k a x y z = 0 () jk, j, k, + j+ k n Despte ther representaton potental, exstng technques assocated wth mplct functons have certan severe shortcomngs. Frst, effectvely dgtzng and renderng an mplct functon are oftentmes far from trval. It s extremely dffcult to control the shape of mplct solds whle re-renderng the fed regons fast enough for ther use wthn an nteractve envronment. Second, a desgner often has no ntutve understandng of the effect of alterng polynomal coeffcents or addng/deletng components. Consder (), the coeffcents provde nether drect and natural geometrc nterpretaton nor ntutve nsght nto the underlyng shape. Thrd, there are no convenent tools for the ntutve shape control of ths type of algebrac solds. Moreover, general mplct functons usually have a property of global control. In contrar a large number of technques and tools have been developed to afford global and local control of conventonal parametrc surfaces or solds. Yet, flexble and drect elng technques for mplct solds are under-explored. We propose a novel elng approach and a haptcsbased sculptng prncple that can ntegrate mplct functons wth parametrc representaton such as pecewse scalar B-splnes, whch permt nteractve and drect manpulaton of mplct solds n real-tme. Local control of the mplct solds can also be easly accomplshed. Ths wll enable desgners to beneft from the low degree and computatonal effcency of mplct functons. Ultmatel our endeavor should make t possble to acheve the full potental of mplct functons n commercal desgn systems.
2 Commonly used graphcs systems often rely upon 2D mouse-based nterfaces for 3D nteracton. Drect operatons on vrtual objects wth a 2D mouse are not as natural and ntutve as nteracton va a 3D nterface. To amelorate ths, we offer users a haptc nterface for the ntutve and natural sculptng of volumetrc mplct functons. Haptcs provdes users a hand-based mechansm for ntutve, manual nteractons wth vrtual envronments towards realstc tactle exploraton and manpulaton. Haptcs-based nteracton has emerged as a crtcal metaphor n the felds of medcne, educaton, ndustr entertanment, and computer arts. Our objectve s to allow users to reach toward an object, feel the physcal presence of ts shape and manpulate t. Wth a standard haptc devce, our approach permts users to nteractvely sculpt vrtual materals havng realstc propertes and feel the physcally realstc presence wth force feedback throughout the desgn process. Usng haptcs n a vrtual envronment, desgners are able to feel and sculpt real objects n a natural 3D settng, rather than beng restrcted to depend on 2D projectons for nput and output. Force feedback provdes addtonal sensory cues to desgners. Ths tactle exploraton can afford desgners to gan a rcher understandng of the 3D nature. The use of haptcs n a vrtual desgn envronment promses to ncrease the bandwdth of nformaton between desgners and the synthetc elng world. Pror research s prmarly focused on haptc renderng (.e. the feelng of rgd surfaces/solds). In contrast, our haptc sculptng system allows desgners to nteractvely sculpt mplct solds n real-tme. Our volumetrc mplct functons are well suted for ntegraton wth a haptc approach because of the propertes of mplct functons. In partcular, the elng of mplct functons smplfes the complcated computaton of collson detecton and depth penetraton between mplct solds and ponts n 3D. Throughout our system, the sculpted object s evaluated as a level set of a volumetrc mplct functon defned over a three-dmensonal workng space. Although we employ unform or non-unform B-splnes as the underlyng functon, consttuent functons may be of arbtrary type wth or wthout the local control property. We further enhance scalar B-splne functons wth addtonal features such as herarchcal decomposton and CSG-based operaton. Through the knot nserton, our system takes advantage of both unform and non-unform B-splne functons so that the knot dstrbuton wll nfluence the local shape. Rather than ndrectly fyng the coeffcents assocated wth the volumetrc mplct functon as exhbted n pror work, our sculptng tools support the drect manpulaton of mplct functons' scalar values. Our algorthms can automatcally determne all of the unknown control coeffcents and effectvely reconstruct a new volumetrc mplct functon after the local/global fcaton. Our system offers a wde array of ntutve sculptng tools responsble for the effectve constructon of varous complcated geometrc shapes wth dverse topologes. Ths allows desgners to nteractvely and drectly sculpt mplct solds wth ease. The use of pecewse B-splnes facltates the rapd fcaton on arbtrar localzed regons. It may be noted that the ntegraton of a haptc nterface and volumetrc mplct elng should be of nterest to much broader communtes. 2. Background Revew 2. Volume Sculptng Galyean and Hughes [4] frst ntroduced the concept of volume sculptng and developed a system wth smple tools n 99. Later, Wang and Kaufman [9] presented a smlar sculptng system wth sculptng tools of carvng and sawng. In order to acheve real-tme nteracton, the system reduced the complex operatons between the 3D tool volume and the 3D object to prmtve voxel-by-voxel operatons. Barentzen [] proposed to use octree-based volume sculptng. The possblty to support multresoluton sculptng and ts advantages were dscussed at length. In a nutshell, the aforementoned sculptng systems were all dependent on the smple, voxelbased operaton. The sculpted objects and the sculptng tools are represented usng a dscrete characterstc functon. Unfortunatel only C 0 contnuty could be acheved. In order to avod the object spatal alasng, the sculpted objects and sculptng tools need to undergo an approprate flterng operaton. Recentl Ravv and Elber [5] presented a 3D nteractve sculptng paradgm that employed a set of scalar unform trvarate B-splne functons as underlyng representaton. The sculpted object was represented as the zero set of the trvarate functons. Users can ndrectly sculpt objects to a desrable shape by drectly fyng relevant scalar control coeffcents of the underlyng functons wth tools. Ths work poneers the use of a contnuous characterstc functon n 3D sculptng. 2.2 Implct Functons Blnn [3] demonstrated that mplct functons are well suted for both scentfc vsualzaton and the elng tasks n computer graphcs. Typcal technques nclude forcng an algebrac surface to nterpolate a set of (regular or scattered) ponts or a network of spatal curves, and usng pecewse algebrac patches to form a complex shape satsfyng certan contnuty requrements across patch boundares. Sederberg [4][5] dscussed the elng technques for cubc algebrac surfaces.
3 Hoffmann [6] systematcally revewed the mplct functon technques ncludng the mplctzaton, parameterzaton, and the parametrc/mplct converson n CAGD. Bajaj and Ihm [7] presented an effcent algorthm to mplement Hermte nterpolaton of lowdegree algebrac surfaces wth C or G contnuty. ote that, nether pont nor curve nterpolaton s an attractve mechansm for defnng an mplct surface because t s dffcult for desgners to predct the surface behavor beyond nterpolatng curves and ponts. Implct functons can also be used to represent a sold. Commonly-used, yet smple solds such as spheres, cubes, cylnders, and tor are oftentmes used as prmtves. To create more nterestng shapes, prmtve solds can be collected nto a herarchcal organzaton wth the help of Boolean operatons. More complcated operatons through the use of functonal composton are also possble to generate more nterestng shapes. The common feature essental to all mplct sold elng methods [8][9] s the creaton of an orented three-dmensonal boundary surface whch parttons the entre 3-space nto two dstnct regons, namely the one occuped by the sold nteror and the one outsde of the defned sold. 2.3 Haptc Renderng Haptc renderng s the process of applyng forces through the use of force-feedback devces and augmentng a vrtual envronment wth a haptc nteracton. Haptc renderng requres: () sensng the poston of the user's fnger; (2) locatng the contact pont; and (3) approprately generatng a force to be appled to the fnger. Thompson et al. [6] derved effcent ntersecton technques that can be appled to nearly any type of haptc nterface. Dachlle et al. [20] developed a haptc nterface to permt the drect manpulaton of dynamc surfaces. McDonnell et al. [7] employed haptc toolkts to explore the dynamc subdvson solds. Avla et al. [8] presented a haptc nteracton that s sutable for both volume vsualzaton and elng applcaton. Despte the wdespread applcaton of haptcs n vsual computng areas, haptcsbased nteracton was manly appled to parametrc representatons for shape sculptng. We ntegrate the prncple of haptc elng wth the drect manpulaton of mplct solds. 3. Volumetrc Implct Functons 3. Tensor-Product Scalar B-splnes Throughout ths paper, we utlze scalar trvarate B- splne functons as the underlyng shape prmtves for object representaton. The use of mplct B-splne functons for sold elng s strongly nspred by ther attractve propertes ncludng smplct generalt local control, etc. The generc B-splne functons are of the followng form: l m n s ( u, v, w) = p B ( u) C ( v) D ( w (2) = 0 j= 0 k= 0 jk, r j, s k, t ) where s ( u, v, w) represents the scalar value at poston (u, v, w) n parametrc doman. u, v, w change from 0 to U, V, W, whch represent the sze of samplng ponts along three dmensons of parametrc doman. p jk are the scalar control coeffcents wth the doman of I, J, K that are [0, l-], [0, m-], [0, n-], respectvely. In addton, B, r ( u), C j, s ( v) and D k, t ( w) are the bass functons correspondng to p jk, evaluated at (u, v, w). The degrees of the three bass functons are r-, s-, and l-, respectvely. To smplfy the mathematcal notaton, (2) can also be expressed as the followng matrx form: s = ( B C D) p (3) where denotes Kronecker Product, and T s = [, s, ] ( [0, U ], j [0, V ], k [0, W ]) jk p = [, p, T jk ] ( [0, l ], j [0, m ], k [0, n ]) B, C, and D are matrces composed of the samplng of bass functons. They are of the followng forms: B0, u0) B, u0 ) m BI, u0) C0, s( v0 ) C, s( v0 ) m CJ, s( v0) = B0, u ) B, u ) m BI, u) B C0, s( v ) C, s( v) m CJ, s( v ) C= o o m o o o m o B0, uu ) B, uu ) m BI, uu ) C 0, s( vv ) C, s( vv ) m CJ, s( vv ) D0, w0 ) D, w0 ) m DK, w0 ) = D0, w ) D, w ) m DK, w ) D o o m o D0, ww ) D, ww ) m DK, ww ) ( B C D) could be precomputed n order to save runtme computaton and mprove real-tme performance. 3.2 Implct Solds The mplct functon can be generally characterzed as: {( x, F( = 0} (4) The boundng surface defned by an mplct functon s a level-set w = F( w = w0 By collectng all the level sets whose return values are greater (or smaller) than a gven threshold, we could defne a mplct sold. w = F( w > w0 The advantages of mplct forms have been brefly documented n Secton. In prncple, the elng schemes founded upon mplct forms are much more (5) (6)
4 powerful than that of parametrc-drven geometrc elng. However, elng technques based on mplct functons are not yet wdespreadly explored due to the lack of drect manpulaton mechansm. Our elng system can brdge the large gap towards the full realzaton of all the elng power of mplct functons. 3.3 Volumetrc Implct Functons We shall collect dfferent B-splne patches defned over the 3D workng space to form a volumetrc mplct functon that can be collectvely used to represent objects of complcated geometry and arbtrary topology. ote that, sgnfcantly dfferent from commonly-used parametrc B-splnes, mplct B-splne functons formulate the scalar value dstrbuton n 3D where mplct solds are unquely defned as sem-algebrac pont sets. Ravv and Elber [5] used a smlar representaton to mplement a freeform sculptng system. In our system, we further enhance the B-splne representaton power by ncorporatng the elng advantages from herarchcal splnes, generalzed CSGbased Boolean operatons, and non-unform knot nserton Herarchcal Organzaton Let us assume users have defned B-splne patches over the sculptng workng space, whch are located at any locaton and wth any orentaton. In general, these patches may be formulated by dfferent number of control coeffcents n order to acheve the goal of multresoluton analyss and level-of-detals control. Then the scalar value at the locaton ( can be computed as F( = s ( T ( ) (7) = where T s an affne transformaton from the Eucldan space to the parametrc doman of patch s. Snce the trvarate B-splne has the affne nvarance propert ths transformaton can be easly mplemented. For each dfferent patch s, there s a correspondng transformaton T. ow F ( becomes a new volumetrc mplct functon defned over the 3D workng space. Wthout loss of generalt we make use of cubc B-splnes wth nonperodc knot vectors. In order to make the boundares of dfferent trvarate patches acheve C contnut the frst and last 4 layer control coeffcents along three prncpal drectons of the parametrc doman should be set to zero CSG-based Operatons Users may ntend to sculpt mplct solds to form sharp features over ther boundares or change the contnuty requrements across ther smooth boundares. Featurebased sculptng tools can sgnfcantly mprove the system performance. In lght of ths demand from users, our system provdes CSG-based operatons on any userdefned trvarate patche n order to facltate the rapd constructon of complcated els satsfyng many feature-orented requrements. Therefore, complcated geometry s readly avalable n our system through the use of F( = s ( T ( ) (8) Ω= where Ω s a Boolean operaton such as Unon, Intersecton, or Dfference. In addton, T and s have the same geometrc meanng as those appeared n (7). In our system, the Boolean operaton nformaton wll be stored n a tree structure n order to speedup the data query on-unform Knot Dstrbuton The use of unform knots to el sophstcated objects may result n a extremely large number of knots and control ponts. Ths wll lead to nformaton redundancy and deformaton dffculty as many degrees of freedom must be employed n any localzed small regon. However, the use of non-unform knot sequences affords addtonal shape control and the elng of a much larger class of shapes than what the unform knot vectors can offer. Furthermore, the use of non-unform B-splnes can overcome certan elng dffcultes assocated wth unform B-splnes. For example, t s almost mpossble for B-splnes wth unform knot vectors to nterpolate hghly unevenly spaced data ponts wthout the unwanted scenaro of oscllatons or loops [2]. Our system allows users to specfy a non-unform vector durng the ntalzaton phase of the object desgn sesson. In addton, users could nsert more knots anywhere nto current knot vector at any tme after the sculptng manpulaton s underway. When new knots are nserted, the system wll generate correspondng control coeffcents and the sculpted object wll be reevaluated upon the refned knot vector. In our system, the knot spacng s proportonal to the dstances of the data ponts: = + x + x where represents the spatal dfference between the (+)th knot and th knot, x represents the spatal dfference between the (+)th data pont and th data pont. Thus, the underlyng el represented by volumetrc mplct functons s essentally a non-unform B-splne. Through the dfferent combnaton of these three technques, our system could offer users a large array of elng operatons and enhance the already-powerful shape varaton of mplct B-splnes wth the addtonal flexblty n a herarchcal fashon.
5 4. System Descrpton The sculpted object of an mplct B-splne functon s dscretzed nto a voxel raster n our system for renderng purpose. Every voxel contans a scalar value, called densty value, sampled at a grd pont. The volumetrc mplct functon descrbed n Secton 3 s employed to assgn the densty value to the sample ponts to ndcate f the locaton has materal. The functon wll be used to formulate the densty dstrbuton over the 3D workng space and represent the sculpted object by a gven level set. Fg. (see the color page) shows voxel maps n 2D space and 3D space, respectvely. Ths voxelmap defnes a functon, where the sold partcles (colored n red) denote locatons n whch materal exsts and the empty partcles (colored n gray) denote locatons n whch there s no materal. Although we use bnary materal dstrbuton n Fg. to llustrate the concept, however, n our system the characterstc functon s not a bnary functon, rather t s a contnuous functon. When a sculptng tool s used to sculpt the object, the densty values of the workng space nsde the tool volume wll be fed correspondngly. Then the system wll reconstruct the volumetrc mplct functon to represent the new, fed object undergong deformaton. By usng local Marchng Cubes technque [2][2], the sosurface of the object could be dsplayed nteractvely. The haptc nterface of our system allows users to reach toward an object, feel the physcal presence of ts shape, and sculpt t wth force feedback. Through the use of many haptc tools avalable n our system, users can obtan both ntutve feelng and better understandng of the vrtual sculptng. The feedback forces are computed drectly based on the object representaton. 4. Octree-based Data Structure Snce the sculpted object s dscretzed n a voxel raster, usually there are many homogeneously empty regons outsde the object of nterest. If those regons could be quckly separated from the sculptng regon, t wll sgnfcantly reduce the memory consumpton and speed up the volume renderng and elng tasks. Therefore, an octree-based data structure s employed n our system, smlar to the scheme used n []. The workng space s recursvely subdvded untl ether the subdvded volume s empt or the subdvson has reached a pre-defned maxmal subdvson depth. In the frst case, the subdvded volume s an empty leaf node, whle the second stuaton means that the current locaton s not empty and the materal property at that locaton should be recorded. Every tme the sculpted object s fed by a sculptng tool, the octree data structure could locate where the fcaton s performed and only needs to locally update the volumetrc mplct functon for effcency purpose. Our system uses Marchng Cubes technque to render the sosurface of the sculpted object. Ths local update property can speed up the Marchng Cubes renderng by only conductng the reevaluaton task of the fed parts. 4.2 Volume Sculptng 4.2. Tool Modelng Tools are represented by any 3D mplct functon w 0 = G(. It s easy to determne whether a locaton s nsde the tool volume by smply evaluatng the functon. In order to prevent object spatal alasng, a flterng operaton must be used nsde the tool volume. The flterng algorthm used n our system s smlar to the one n [4][9]. Gven a locaton (, the shortest dstance from ( to the boundary of the tools s computed usng the evaluaton functon. Then ths shortest dstance s used to flter the densty values at the locaton (. Here we use a lnear flter. The mnmal densty value s assgned to the boundary and the maxmal one s assgned to the center of the tool. The densty values at the ntermedate locatons are lnearly nterpolated. So the densty value at ( s proportonal to the shortest dstance to the boundary. Later we wll explan how to further generalze ths concept n haptc nterface to obtan realstc force feedback Tool-Object Interacton When users assgn a sculptng tool to a new locaton, the tool s mapped to the coordnate system, whch contans the sculpted object. The boundary box of the tools s then computed. And the densty values at the locatons nsde the tool volume are fed as descrbed n Secton If the tool s to add materal, those densty values should be greater than the object so-value. If the tool s to remove materal, those densty values should be less than the so-value. After ths ntal fcaton on materal dstrbuton, we have to reconstruct the volumetrc mplct functon of B-splnes accordng to the new densty dstrbuton. Currentl our system only allows sngle operaton to fy exactly one patch at any tme durng the sesson of volume sculptng. So only control coeffcents that belong to one B-splne patch need to be fed at every tme of sculptng. Realtme performance wth realstc haptc feedback can be easly acheved. The mathematcs of B-splne manpulaton s formulated as follows: ( B C D) p new = s new (9) where s new represents the new densty dstrbuton over the sculpted patch regon and p new are new control coeffcents, B, C, D are samplng matrces of bass functons as shown n Secton 3.. Because of the local support property of B-splnes, only a very small subset of
6 the control coeffcents needs to be fed. Hence, we only need to solve ths system of lnear equatons wthn the tool sculptng regon. Therefore, (9) can be further smplfed nto: B C D p = (0) ( ' ' ') s where s and p only come from the fed regon. B', C' and D' are small sets of the orgnal bass matrces, whch are correspondng to the local fed regon. ow, n essence the problem of volumetrc sculptng s equvalent to a typcal data fttng applcaton: Gven a set of ponts ( x, y j, zk ) n the parametrc doman, and the densty value d jk at every pont, fnd the best possble soluton that fts the data set ether through nterpolaton (when one unque soluton exsts) or approxmaton (when the system becomes over-constraned). Usually the number of control coeffcents s less than the hardwarepermtted resoluton of 3D workng space. So we employ the Mean Square Error for data approxmaton: MSE = LM L M = j= k= ( d jk s( x, y, z )) j k 2 () where LM represents the total number of data ponts that have been fed usng certan sculptng tools. Therefore, t s necessary to seek a functon s(x,y, that mnmzes the mean square error. It s convenent to use matrx algebra to symbolcally formulate the soluton to the precedng problem. Usng the matrx forms, the Mean Square Error can be wrtten as: = LM [ d ( B' C' D') p ] 2 MSE (2) where d s a vector of densty values whose elements are d jk. Dfferentatng wth respect to the elements of p, and settng the dervatve to zero leads to the soluton: T T p = [( B' C' D' ) ( B' C' D' )] ( B' C' D' ) d (3) whch s equvalent to the least-square fttng. After the new control coeffcents are generated, the system uses the Local Marchng Cubes algorthm to render the fed part to generate the new sosurface of the deformed object. 4.3 Haptc Feedback In order to enhance the realsm of the vrtual sculptng, our system offers haptc nteractons, whch can gve users a realstc feel of the vrtual objects. Thus, users can gan a rcher understandng of ther sculpted el. Our work sgnfcantly extends the noton of smply touchng complant objects (.e., haptc renderng) to nteractvely and drectly sculptng of vrtual solds (.e., haptc elng). From the standpont of volume sculptng, the followng problems must be addressed n order to provde meanngful force feedback for haptc nteracton: Force computatonal rate: the computatonal rate must be hgh and latency must be low. Inapproprate values can cause an mproper feel of the vrtual envronment. Generaton of contactng forces: ths creates the "feel" of the object. Contactng forces can represent the stffness of the object, dampng, frcton, surface texture, etc. Fast data fcaton and renderng: ths could make the sculptng operaton consstent wth the haptc force feedback. Snce the sculptng could only be performed wthn a small regon at every tme step, t s natural to only allow the computaton of haptc nteractons to occur wthn a localzed regon, n order to meet the hgh frequency requrement set by the haptc devce and make the sculptng consstent wth the force feedback. In addton, oftentmes users' meanngful sculptng operatons would not exceed the regon lmtaton wthn a very tny tme step along tme axs (e.g., only ~2 ms n our system). So ths assumpton s reasonable and does not ntroduce any lmtatons n our volume sculptng system. In our system, we use a pont contact force el [8]: F = R( V ) + S( ) (4) where V s movng speed of a contactng pont, R (V ) s a dampng force that tends to resst moton along the opposte drecton of the contactng pont's movement, S ( ) s a stffness force along the normal of the contactng pont ( ). F s the feedback force to users, whch s equal to the sum of the moton dampng force and stffness force. The force calculaton should be very fast to meet the PHAToM update rate (.e., greater than kh. Otherwse, users would have uncomfortable feelngs such as buzzng durng the haptc nteracton, hence, destroyng the purpose of usng haptcs to augment realsm. As we descrbed n Secton 4.2., the densty dstrbuton n our el s proportonal to the dstance map. So t s natural for us to use the densty feld nstead of the dstance feld to calculate the force. The moton dampng force and stffness force are calculated, respectvel as follows: R( V ) V f ( d) = (5) S( ) f s ( d ) r = (6) where d s a densty value, f r and f s are transfer functons, whch map densty values to force magntudes. The transfer functons f r and f s that we are currently usng n our envronment are as follows: ( ) = ( ) (7) f d a d d r new + b


7 f ( d) k( d d) s = new (8) where d s current densty value at (, d new represents the new densty value at ( x + y + z +, whch s the very next tme step. a, b and k are control varables whch can be nteractvely set up by users. Usng dfferent transfer functons, we could let users feel dfferent force effects, ncreasng the flexblty of our haptc nteracton. In our system, the densty dstrbuton over the 3D workng space s represented as a contnuous volumetrc mplct functon of B-splnes. Ths property can help to avod the dscontnuous force feedback, whch leads to unrealstc feelngs such as buzzng. Another advantage for ntegratng haptc nteracton wth mplct functons s that t s much easer to compute the contactng pont and determne f the contactng pont s nsde the object to be sculpted. The densty value at any locaton could be gven by smply evaluatng the volumetrc mplct functon. Therefore, the dampng force and stffness force could be computed effcently to satsfy the hgh update rate of haptc nteracton, R ( V) = V ( a( F( x + y + z + F( ) + b) (9) S( ) = k ( F( x + y + z + F( ) (20) where F s obtaned from (7) or (8). The normal at ( can be computed analytcally as F F F (,, ). x y z 5. Implementaton Our system s mplemented on a Mcrosoft Wndows T PC wth a 550MHz CPU and 52 MB RAM. A PHAToM.0 3D Haptc nput/output devce from Sensable Technologes s employed to provde natural and realstc force feedback. The entre system s wrtten n Mcrosoft Vsual C++ and the graphcs renderng component s bult upon OpenGL. Fg. 2 (see the color page) shows the system nterface. When usng haptc tools, to reduce the latency and maxmze the throughput, we resort to a parallel technque that can multthread the haptcs, graphcs, and sculptng processes wth weak synchronzaton. Ths technque leads to the possble performance mprovement and ultmatel the parallel processng of haptc sculptng gven the hghend mult-processor envronment. Therefore, our system s readly avalable n many dfferent confguratons. Fg. 3 shows the structure of the multthreads, where thck arrows represent data flow and thn arrows represent control flow. The haptc loop s mplemented n a sngle thread. It mantans the haptc refresh rate whch s no less than KHz. Ths requrement s crtcal to the realstc feedback of haptc nteracton. If the update rate s below the threshold of KHz, users would feel uncomfortably. In our system, the haptc thread has the hghest prorty. Sculptng thread Get cursor poston Object sculptng Update object Object dataset Graphcs thread Local Marchng Cubes Update dsplay Fg. 3 The structure of multthreads The object sculptng loop s mplemented n another thread. It controls the object sculptng. In order to keep up wth haptc update rate, any sculptng operaton wthn one tme step s lmted to a small regon. As we specfed n Secton 4.3, usually users' sculptng operatons would not exceed ths lmted regon wthn a tny tme step. The graphcs loop s developed to handle the renderng of volumetrc objects. The renderng task makes use of local Marchng Cubes algorthm and only update the very small regon n order to acheve nteractve speed and make graphcs dsplay consstent wth sculptng operaton and force feedback. 6. Interactve Sculptng Toolkts Haptc thread Get haptc nput Compute forces Send back forces Our system offers several haptc tools such as haptc so-surface feelng, haptcs-based probng, and haptcsbased drller. Besdes feelng the boundary surface of a volumetrc object, users can choose any so-value from the allowable range of the volumetrc mplct functon and the system generates correspondng sosurfaces quckly. The fgure on the left shows two dfferent so-surfaces wth the wreframe dsplay e n order to make two surfaces vsble at the same tme. Users can feel dfferent so-surfaces of the sculpted object by movng the cursor and navgatng over those so-surfaces. Ths tool allows users to examne the smoothness of objects' surface and the nteror structure tactlely. Through the use of the contactng force el descrbed n Secton 4.3, our system can afford users to feel the tny dfference of an object's stffness (or densty) whle users move the cursor nsde the object. When actve, the probng tool exerts a force on the user's fnger proportonal to the local densty values wthn a gven radus of the tool.
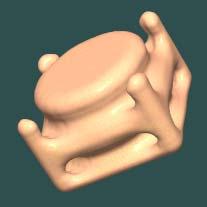
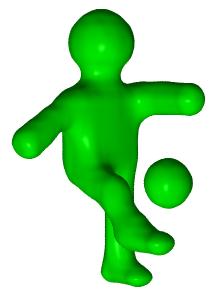
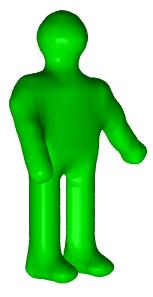
8 Usng the haptcs-based drller, user can make a drll to the object along any drecton. In ths process, users could feel the realstc force comng from the object's stffness and the moton resstance. The drller could be any knd of shape such as spheres, cubes or stars. For tool operatons, Fg. 4 (see the color page) shows a number of toolkts ncludng sphere-based carvng and addton tools, cylnder-based carvng and addton tools, rectangle-based carvng and addton tools, torus-based carvng and addton tools, chsel tools, copy and composng tools, squrt tools, nflaton and deflaton tools, movng and bendng tools, etc. ext we explan some tool confguratons and ther operatons. When usng copy and composng tools to buld up a complcated scene wth the same object, users can defne a number of trvarate patches at any locatons and along any drectons. The collecton of those patches s based on the unon operaton for CSG els. Through the use of the smple copy operaton, the patch coeffcents can be duplcated from one regon to another regon of nterest, a set of smlar objects of the same geometry could be easly created. In Fg. 4 where copy and composng operatons were undertaken, 3 3 patches were created parallel to each other n the workng space. When the char sculptng was completed nsde one patch, the coeffcents of that patch were coped and loaded n other 8 patches to create the scene. The nflaton and deflaton tools cause a localzed regon to grow or shrnk. Users can nteractvely defne a regon. When usng a deflaton tool, the coeffcents of the scalar trvarate mplct functon nsde the regon decrease n order to shrnk the specfed part of the object. For the nflaton tool, those coeffcents should be ncreased nstead. In Fg. 4 where nflaton and deflaton operatons were undertaken, the soccer player's head was nflated and one of hs arms was deflated. The movng tool moves a selected regon of the coeffcents to other locatons. The bendng tool deforms a selected regon of coeffcents to new postons. In Fg. 4 where movng and bendng operatons were undertaken, we frst moved both arms up through the use of the movng tool, and then, bended the player to get the second gesture. 7. Expermental Results We have developed a novel elng system for haptc sculptng of the volumetrc mplct functon based on nonunform B-splnes. The mplct sold can be generated wth a varable number of control coeffcents and wth varable samplng rates. We have conducted a large number of experments and recorded the runnng tme for the sculptng of volumetrc mplct functons. The experments are based on a workng space sampled at The tool sze s gven as the number of data ponts that the tool affects. The results are detaled n Table. Table : Run tme of Tool-Object nteracton Control coeffcent Update tme Tool sze resoluton (ms) Wthn our mplct functon elng framework and wthout usng any other external resource, we have created several nterestng objects and scenes from scratch. Fg. 5 (see the color page) shows a seres of actons of a soccer player. They were sculpted wth unform knots and control coeffcents. Fg. 5(a) shows a standng one. We shall use ths example to explan how to sculpt an object usng our system. We began wth a cubc block. By carvng and haptcally drllng the cubc block several tmes, a rectangular body was created. The neck was sculpted usng cylnder-based addton. The head was placed on top of the neck usng a sphere-based addtve tool. By way of a rectangular tool, the shoulder part was sculpted. The two arms were created usng cylnder-based addton. The two legs were obtaned n a smlar fashon. The feet were sculpted by addng rectangular materals and sculptng wth sphere-based tools and the haptcsbased drller. Other motons of the soccer player are all based on the ntalzed el. Through the use of movng and bendng operatons, the anmated sequences of els were subsequently created. Fg. 6 (see the color page) shows several characters mounted on a rectangular stone. The workng space contans a sngle patch wth non-unform knots and control coeffcents. The regon that contans all characters has much more knots and control coeffcents than the flat regon where no deformaton s undertaken. Fg. 7, Fg. 8 and Fg. 9 (see the color page) show three scenes, whch were sculpted entrely usng our system (wthout resortng to any other external resource) and rendered usng the commercal software of POV-Ray. For example, Fg. 7 shows a cartoon tran runnng n a desert envronment. The tran was sculpted wth nne patches. One patch was for sculptng the body of the tran. And other eght patches were used for sculptng the eght wheels. The ralroad was sculpted n a patch. Every cactus was sculpted n a patch. The collecton of the patches n the workng space was based on herarchcal organzaton and unon operaton.
9 8. Concluson We have presented a novel haptcs-based volumetrc sculptng envronment that employs trvarate scalar nonunform B-splnes as underlyng representaton. All the volumetrc objects sculpted n our elng system are characterzed by pece-wse mplct functons. We have proposed a new approach that unfes mplct functons and parametrc representatons wthn a sngle haptcsbased sculptng system. We have developed a large varety of algorthms and toolkts that afford desgners the mechansm of nteractve and drect manpulaton of mplct solds n real-tme, augmented by a realstc and ntutve haptc nterface. To facltate multresoluton edtng and drect control on dfferent levels of detals, we have also ncorporated three popular elng technques: herarchcal B-splnes, CSG-based functonal composton, and knot nserton nto our envronment, makng our novel mplct elng technques even more powerful and flexble to handle both complcated geometry and arbtrary topologes. Our experments have demonstrated that our algorthms and drect edtng technques based on nonunform B- splne mplct functons can not only overcome the exstng dsadvantages assocated wth conventonal elng of mplct functons, but realze all the potentals exhbted n mplct functons n vsual computng felds as well. More mportantl the powerful 3D haptcs-based nterface of our system s more ntutve and natural than conventonal 2D mouse-based nterfaces, makng t possble for our mplct functon elng system to appeal to a spectrum of users rangng from hghly traned engneerng desgners, computer professonals, artsts, to even computer llterates. Our sculptng system permts desgners to create real-world, complcated els n real-tme. Fnall the novel elng technques and ther haptcs-based desgn prncple are extensble to the desgn of arbtrary mplct functons. Acknowledgements The authors wsh to thank Kevn T. McDonnell and We Hong for provdng some of the code used n mplementng ths system. Ths research was supported n part by the SF CAREER award CCR , the SF grant DMI , the SF ITR grant IIS , and research grants from Ford Motor Company and Honda Amerca Inc. References [] J. Bloomenthal, B. Wyvll. Interactve technques for mplct elng. Computer Graphcs, Vol. 24, o. 2, pp 09-6, March 990. [2] L. Pegl and W. Tller. Curve and surface constructons usng ratonal B-splnes. Computer-Aded Desgn, Vol. 9, o. 9, pp , ovember 987. [3] J. F. Blnn. Generalzaton of algebrac surface drawng. ACM Trans. On Graphcs, Vol., o. 3, pp , July 982. [4] T. A. Galyean and J. F. Hughes. Sculptng: An nteractve volumetrc elng technque. Computer Graphcs, Vol. 25, o. 4, pp , July 99. [5] A. Ravv and G. Elber. Three dmensonal freeform sculptng va zero sets of scalar trvarate functons. In Proc. of 5th ACM Symposum on Sold Modelng and Applcatons, pp , 999. [6] T. V. Thompson, D. E. Johnson and E. Cohen. Drect haptc renderng of sculptured els. In Proc. of the 997 Symposum on Interactve 3D Graphcs, pp 67-76, 997. [7] K. T. McDonnell, H. Qn and R. A. Wlodarczyk. Vrtual Clay: A real-tme sculptng system wth Haptc Toolkts. In Proc. of the 200 Symposum on Interactve 3D Graphcs, pp.79-90, 200. [8] R. S. Avla and L. M. Soberajsk. A haptc nteracton method for volume vsualzaton. In Proc. of the 7th IEEE Vsualzaton 96, pp , 996. [9] S. W. Wang and A. E. Kaufman. Volume sculptng. In Proc. of the 995 Symposum on Interactve 3D Graphcs, pp 5-56, 995. [0] D. R. Forsey and R. H. Bartels. Herarchcal B-splne refnement. Computer Graphcs, Vol. 22, o. 4, pp 205-2, August 988. [] J. Andreas Barentzen. Octree-based volume sculptng. IEEE Vsualzaton 98, Late Breakng Hot Topcs Proceedngs, pp. 9-2, 998. [2] W. E. Lorensen and H. E. Clne. Marchng Cubes: A hgh resoluton 3D surface constructon algorthm. Computer Graphcs, Vol. 2, o. 4, pp 63-69, July 987. [3] H. Qn. Physcs based geometrc desgn. Internatonal J. of Shape Modelng, Vol. 2, o. 2&3, pp 39-88, 996. [4] T. Sederberg. Technques for cubc algebrac surfaces. IEEE Computer Graphcs and Applcaton, Vol. 0, o. 4, pp 4-25, 990. [5] T. Sederberg. Technques for cubc algebrac surfaces. IEEE Computer Graphcs and Applcaton, Vol. 0, o. 5, pp 2-2, 990. [6] C. Hoffmann. Implct curves and surfaces n CAGD. IEEE Computer Graphcs and Applcatons, Vol. 3, o., pp 79-88, 993. [7] C. Bajaj and I. Ihm. Algebrac surface desgn wth Hermte nterpolaton. ACM Transactons on Graphcs, Vol., o., pp 6-9, 992. [8] J. L. Blechschmdt and D. agasuru. The use of algebrac functons as a sold elng alternatve. Advances n Desgn Automaton, B. Ravan Ed., ASME Desgn Conference, Chcago, IL, pp. 33-4, Sept [9] V. Shapro. Real functons for representaton of rgd solds. Computer Scence Tech. Report TR9-245, Cornell Unv., Ithaca, Y, 99. [20] F. Dachlle IX, H. Qn and A. E. Kaufman. A novel haptcs-based nterface and sculptng system for physcsbased geometrc desgn. Computer-Aded Desgn, Vol. 33, o. 5, pp , 200. [2] G. Wyvll, C. McPheeters and B. Wyvll. Data structure for soft objects. The Vsual Computer, Vol. 2, o. 4, pp , 986.









10 Fg. Voxelmap n 2D and 3D Fg. 2 System Interface comprsed of on-screengui, a PHAToM devce Sphere-based carvng and addton Cylnder-based carvng and addton Rectangle-based carvng and addton Torus based carvng and addton Chsel operaton Copy and composng operaton Squrt operatons Inflaton and deflaton operatons Movng and bendng operatons Fg. 4 A set of typcal toolkts and sculpted examples
 (f) (a)")
 Startng")
")



 Fg.")



11 (a) (b) (c) (d) (e) (f) (a) Model ntalzaton, (b) Startng poston, (c) Movng, (d) Kckng, (e-f) Celebratons Fg. 5 A moton seres of a soccer player and hs entre kckng actons (a, b, c, d, e, f) Fg. 6 Englsh letters mounted on stone plates Fg. 7 A Runnng Cartoon Tran Fg. 8 A corner of PG dscusson room Fg. 9 PG conference room
Modeling, Manipulating, and Visualizing Continuous Volumetric Data: A Novel Spline-based Approach
 Modelng, Manpulatng, and Vsualzng Contnuous Volumetrc Data: A Novel Splne-based Approach Jng Hua Center for Vsual Computng, Department of Computer Scence SUNY at Stony Brook Talk Outlne Introducton and
Modelng, Manpulatng, and Vsualzng Contnuous Volumetrc Data: A Novel Splne-based Approach Jng Hua Center for Vsual Computng, Department of Computer Scence SUNY at Stony Brook Talk Outlne Introducton and
S1 Note. Basis functions.
 S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
Hermite Splines in Lie Groups as Products of Geodesics
 Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
Cluster Analysis of Electrical Behavior
 Journal of Computer and Communcatons, 205, 3, 88-93 Publshed Onlne May 205 n ScRes. http://www.scrp.org/ournal/cc http://dx.do.org/0.4236/cc.205.350 Cluster Analyss of Electrcal Behavor Ln Lu Ln Lu, School
Journal of Computer and Communcatons, 205, 3, 88-93 Publshed Onlne May 205 n ScRes. http://www.scrp.org/ournal/cc http://dx.do.org/0.4236/cc.205.350 Cluster Analyss of Electrcal Behavor Ln Lu Ln Lu, School
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Smoothing Spline ANOVA for variable screening
 Smoothng Splne ANOVA for varable screenng a useful tool for metamodels tranng and mult-objectve optmzaton L. Rcco, E. Rgon, A. Turco Outlne RSM Introducton Possble couplng Test case MOO MOO wth Game Theory
Smoothng Splne ANOVA for varable screenng a useful tool for metamodels tranng and mult-objectve optmzaton L. Rcco, E. Rgon, A. Turco Outlne RSM Introducton Possble couplng Test case MOO MOO wth Game Theory
Parallelism for Nested Loops with Non-uniform and Flow Dependences
 Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Interpolation of the Irregular Curve Network of Ship Hull Form Using Subdivision Surfaces
 7 Interpolaton of the Irregular Curve Network of Shp Hull Form Usng Subdvson Surfaces Kyu-Yeul Lee, Doo-Yeoun Cho and Tae-Wan Km Seoul Natonal Unversty, kylee@snu.ac.kr,whendus@snu.ac.kr,taewan}@snu.ac.kr
7 Interpolaton of the Irregular Curve Network of Shp Hull Form Usng Subdvson Surfaces Kyu-Yeul Lee, Doo-Yeoun Cho and Tae-Wan Km Seoul Natonal Unversty, kylee@snu.ac.kr,whendus@snu.ac.kr,taewan}@snu.ac.kr
R s s f. m y s. SPH3UW Unit 7.3 Spherical Concave Mirrors Page 1 of 12. Notes
 SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
Lecture 5: Multilayer Perceptrons
 Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
3D vector computer graphics
 3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
2x x l. Module 3: Element Properties Lecture 4: Lagrange and Serendipity Elements
 Module 3: Element Propertes Lecture : Lagrange and Serendpty Elements 5 In last lecture note, the nterpolaton functons are derved on the bass of assumed polynomal from Pascal s trangle for the fled varable.
Module 3: Element Propertes Lecture : Lagrange and Serendpty Elements 5 In last lecture note, the nterpolaton functons are derved on the bass of assumed polynomal from Pascal s trangle for the fled varable.
Content Based Image Retrieval Using 2-D Discrete Wavelet with Texture Feature with Different Classifiers
 IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
The Greedy Method. Outline and Reading. Change Money Problem. Greedy Algorithms. Applications of the Greedy Strategy. The Greedy Method Technique
 //00 :0 AM Outlne and Readng The Greedy Method The Greedy Method Technque (secton.) Fractonal Knapsack Problem (secton..) Task Schedulng (secton..) Mnmum Spannng Trees (secton.) Change Money Problem Greedy
//00 :0 AM Outlne and Readng The Greedy Method The Greedy Method Technque (secton.) Fractonal Knapsack Problem (secton..) Task Schedulng (secton..) Mnmum Spannng Trees (secton.) Change Money Problem Greedy
A New Solid Subdivision Scheme based on Box Splines
 A New Sold Subdvson Scheme based on Box Splnes Yu-Sung Chang Kevn T McDonnell Hong Qn Department of Computer Scence State Unversty of New York at Stony Brook ABSTRACT Durng the past twenty years, much
A New Sold Subdvson Scheme based on Box Splnes Yu-Sung Chang Kevn T McDonnell Hong Qn Department of Computer Scence State Unversty of New York at Stony Brook ABSTRACT Durng the past twenty years, much
Active Contours/Snakes
 Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
S.P.H. : A SOLUTION TO AVOID USING EROSION CRITERION?
 S.P.H. : A SOLUTION TO AVOID USING EROSION CRITERION? Célne GALLET ENSICA 1 place Emle Bloun 31056 TOULOUSE CEDEX e-mal :cgallet@ensca.fr Jean Luc LACOME DYNALIS Immeuble AEROPOLE - Bat 1 5, Avenue Albert
S.P.H. : A SOLUTION TO AVOID USING EROSION CRITERION? Célne GALLET ENSICA 1 place Emle Bloun 31056 TOULOUSE CEDEX e-mal :cgallet@ensca.fr Jean Luc LACOME DYNALIS Immeuble AEROPOLE - Bat 1 5, Avenue Albert
y and the total sum of
 Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
An Optimal Algorithm for Prufer Codes *
 J. Software Engneerng & Applcatons, 2009, 2: 111-115 do:10.4236/jsea.2009.22016 Publshed Onlne July 2009 (www.scrp.org/journal/jsea) An Optmal Algorthm for Prufer Codes * Xaodong Wang 1, 2, Le Wang 3,
J. Software Engneerng & Applcatons, 2009, 2: 111-115 do:10.4236/jsea.2009.22016 Publshed Onlne July 2009 (www.scrp.org/journal/jsea) An Optmal Algorthm for Prufer Codes * Xaodong Wang 1, 2, Le Wang 3,
A Binarization Algorithm specialized on Document Images and Photos
 A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
INTERACTIVE IMPLICIT MODELLING BASED ON C 1 CONTINUOUS RECONSTRUCTION OF REGULAR GRIDS
 INTERACTIVE IMPLICIT MODELLING BASED ON C 1 CONTINUOUS RECONSTRUCTION OF REGULAR GRIDS LOIC BARTHE RWTH-Aachen, Informatk VIII Ahornstrasse 55, 5074 Aachen, Germany barthe@nformatk.rwth-aachen.de BENJAMIN
INTERACTIVE IMPLICIT MODELLING BASED ON C 1 CONTINUOUS RECONSTRUCTION OF REGULAR GRIDS LOIC BARTHE RWTH-Aachen, Informatk VIII Ahornstrasse 55, 5074 Aachen, Germany barthe@nformatk.rwth-aachen.de BENJAMIN
Type-2 Fuzzy Non-uniform Rational B-spline Model with Type-2 Fuzzy Data
 Malaysan Journal of Mathematcal Scences 11(S) Aprl : 35 46 (2017) Specal Issue: The 2nd Internatonal Conference and Workshop on Mathematcal Analyss (ICWOMA 2016) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES
Malaysan Journal of Mathematcal Scences 11(S) Aprl : 35 46 (2017) Specal Issue: The 2nd Internatonal Conference and Workshop on Mathematcal Analyss (ICWOMA 2016) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES
User Authentication Based On Behavioral Mouse Dynamics Biometrics
 User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
3D Virtual Eyeglass Frames Modeling from Multiple Camera Image Data Based on the GFFD Deformation Method
 NICOGRAPH Internatonal 2012, pp. 114-119 3D Vrtual Eyeglass Frames Modelng from Multple Camera Image Data Based on the GFFD Deformaton Method Norak Tamura, Somsangouane Sngthemphone and Katsuhro Ktama
NICOGRAPH Internatonal 2012, pp. 114-119 3D Vrtual Eyeglass Frames Modelng from Multple Camera Image Data Based on the GFFD Deformaton Method Norak Tamura, Somsangouane Sngthemphone and Katsuhro Ktama
Review of approximation techniques
 CHAPTER 2 Revew of appromaton technques 2. Introducton Optmzaton problems n engneerng desgn are characterzed by the followng assocated features: the objectve functon and constrants are mplct functons evaluated
CHAPTER 2 Revew of appromaton technques 2. Introducton Optmzaton problems n engneerng desgn are characterzed by the followng assocated features: the objectve functon and constrants are mplct functons evaluated
Feature Reduction and Selection
 Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Accounting for the Use of Different Length Scale Factors in x, y and z Directions
 1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
Fitting: Deformable contours April 26 th, 2018
 4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
TN348: Openlab Module - Colocalization
 TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
Assignment # 2. Farrukh Jabeen Algorithms 510 Assignment #2 Due Date: June 15, 2009.
 Farrukh Jabeen Algorthms 51 Assgnment #2 Due Date: June 15, 29. Assgnment # 2 Chapter 3 Dscrete Fourer Transforms Implement the FFT for the DFT. Descrbed n sectons 3.1 and 3.2. Delverables: 1. Concse descrpton
Farrukh Jabeen Algorthms 51 Assgnment #2 Due Date: June 15, 29. Assgnment # 2 Chapter 3 Dscrete Fourer Transforms Implement the FFT for the DFT. Descrbed n sectons 3.1 and 3.2. Delverables: 1. Concse descrpton
High-Boost Mesh Filtering for 3-D Shape Enhancement
 Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Content-Based Multimedia Retrieval Technique Using Compressed Data
 A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
An Entropy-Based Approach to Integrated Information Needs Assessment
 Dstrbuton Statement A: Approved for publc release; dstrbuton s unlmted. An Entropy-Based Approach to ntegrated nformaton Needs Assessment June 8, 2004 Wllam J. Farrell Lockheed Martn Advanced Technology
Dstrbuton Statement A: Approved for publc release; dstrbuton s unlmted. An Entropy-Based Approach to ntegrated nformaton Needs Assessment June 8, 2004 Wllam J. Farrell Lockheed Martn Advanced Technology
Vectorization of Image Outlines Using Rational Spline and Genetic Algorithm
 01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
01 Internatonal Conference on Image, Vson and Computng (ICIVC 01) IPCSIT vol. 50 (01) (01) IACSIT Press, Sngapore DOI: 10.776/IPCSIT.01.V50.4 Vectorzaton of Image Outlnes Usng Ratonal Splne and Genetc
A Geometric Approach for Multi-Degree Spline
 L X, Huang ZJ, Lu Z. A geometrc approach for mult-degree splne. JOURNAL OF COMPUTER SCIENCE AND TECHNOLOGY 27(4): 84 850 July 202. DOI 0.007/s390-02-268-2 A Geometrc Approach for Mult-Degree Splne Xn L
L X, Huang ZJ, Lu Z. A geometrc approach for mult-degree splne. JOURNAL OF COMPUTER SCIENCE AND TECHNOLOGY 27(4): 84 850 July 202. DOI 0.007/s390-02-268-2 A Geometrc Approach for Mult-Degree Splne Xn L
NAG Fortran Library Chapter Introduction. G10 Smoothing in Statistics
 Introducton G10 NAG Fortran Lbrary Chapter Introducton G10 Smoothng n Statstcs Contents 1 Scope of the Chapter... 2 2 Background to the Problems... 2 2.1 Smoothng Methods... 2 2.2 Smoothng Splnes and Regresson
Introducton G10 NAG Fortran Lbrary Chapter Introducton G10 Smoothng n Statstcs Contents 1 Scope of the Chapter... 2 2 Background to the Problems... 2 2.1 Smoothng Methods... 2 2.2 Smoothng Splnes and Regresson
For instance, ; the five basic number-sets are increasingly more n A B & B A A = B (1)
") Secton 1.2 Subsets and the Boolean operatons on sets If every element of the set A s an element of the set B, we say that A s a subset of B, or that A s contaned n B, or that B contans A, and we wrte A
Secton 1.2 Subsets and the Boolean operatons on sets If every element of the set A s an element of the set B, we say that A s a subset of B, or that A s contaned n B, or that B contans A, and we wrte A
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Multiblock method for database generation in finite element programs
 Proc. of the 9th WSEAS Int. Conf. on Mathematcal Methods and Computatonal Technques n Electrcal Engneerng, Arcachon, October 13-15, 2007 53 Multblock method for database generaton n fnte element programs
Proc. of the 9th WSEAS Int. Conf. on Mathematcal Methods and Computatonal Technques n Electrcal Engneerng, Arcachon, October 13-15, 2007 53 Multblock method for database generaton n fnte element programs
Analysis of Continuous Beams in General
 Analyss of Contnuous Beams n General Contnuous beams consdered here are prsmatc, rgdly connected to each beam segment and supported at varous ponts along the beam. onts are selected at ponts of support,
Analyss of Contnuous Beams n General Contnuous beams consdered here are prsmatc, rgdly connected to each beam segment and supported at varous ponts along the beam. onts are selected at ponts of support,
PHYSICS-ENHANCED L-SYSTEMS
 PHYSICS-ENHANCED L-SYSTEMS Hansrud Noser 1, Stephan Rudolph 2, Peter Stuck 1 1 Department of Informatcs Unversty of Zurch, Wnterthurerstr. 190 CH-8057 Zurch Swtzerland noser(stuck)@f.unzh.ch, http://www.f.unzh.ch/~noser(~stuck)
PHYSICS-ENHANCED L-SYSTEMS Hansrud Noser 1, Stephan Rudolph 2, Peter Stuck 1 1 Department of Informatcs Unversty of Zurch, Wnterthurerstr. 190 CH-8057 Zurch Swtzerland noser(stuck)@f.unzh.ch, http://www.f.unzh.ch/~noser(~stuck)
Harmonic Coordinates for Character Articulation PIXAR
 Harmonc Coordnates for Character Artculaton PIXAR Pushkar Josh Mark Meyer Tony DeRose Bran Green Tom Sanock We have a complex source mesh nsde of a smpler cage mesh We want vertex deformatons appled to
Harmonc Coordnates for Character Artculaton PIXAR Pushkar Josh Mark Meyer Tony DeRose Bran Green Tom Sanock We have a complex source mesh nsde of a smpler cage mesh We want vertex deformatons appled to
Problem Definitions and Evaluation Criteria for Computational Expensive Optimization
 Problem efntons and Evaluaton Crtera for Computatonal Expensve Optmzaton B. Lu 1, Q. Chen and Q. Zhang 3, J. J. Lang 4, P. N. Suganthan, B. Y. Qu 6 1 epartment of Computng, Glyndwr Unversty, UK Faclty
Problem efntons and Evaluaton Crtera for Computatonal Expensve Optmzaton B. Lu 1, Q. Chen and Q. Zhang 3, J. J. Lang 4, P. N. Suganthan, B. Y. Qu 6 1 epartment of Computng, Glyndwr Unversty, UK Faclty
Quality Improvement Algorithm for Tetrahedral Mesh Based on Optimal Delaunay Triangulation
 Intellgent Informaton Management, 013, 5, 191-195 Publshed Onlne November 013 (http://www.scrp.org/journal/m) http://dx.do.org/10.36/m.013.5601 Qualty Improvement Algorthm for Tetrahedral Mesh Based on
Intellgent Informaton Management, 013, 5, 191-195 Publshed Onlne November 013 (http://www.scrp.org/journal/m) http://dx.do.org/10.36/m.013.5601 Qualty Improvement Algorthm for Tetrahedral Mesh Based on
Querying by sketch geographical databases. Yu Han 1, a *
 4th Internatonal Conference on Sensors, Measurement and Intellgent Materals (ICSMIM 2015) Queryng by sketch geographcal databases Yu Han 1, a * 1 Department of Basc Courses, Shenyang Insttute of Artllery,
4th Internatonal Conference on Sensors, Measurement and Intellgent Materals (ICSMIM 2015) Queryng by sketch geographcal databases Yu Han 1, a * 1 Department of Basc Courses, Shenyang Insttute of Artllery,
A MOVING MESH APPROACH FOR SIMULATION BUDGET ALLOCATION ON CONTINUOUS DOMAINS
 Proceedngs of the Wnter Smulaton Conference M E Kuhl, N M Steger, F B Armstrong, and J A Jones, eds A MOVING MESH APPROACH FOR SIMULATION BUDGET ALLOCATION ON CONTINUOUS DOMAINS Mark W Brantley Chun-Hung
Proceedngs of the Wnter Smulaton Conference M E Kuhl, N M Steger, F B Armstrong, and J A Jones, eds A MOVING MESH APPROACH FOR SIMULATION BUDGET ALLOCATION ON CONTINUOUS DOMAINS Mark W Brantley Chun-Hung
Performance Evaluation of Information Retrieval Systems
 Why System Evaluaton? Performance Evaluaton of Informaton Retreval Systems Many sldes n ths secton are adapted from Prof. Joydeep Ghosh (UT ECE) who n turn adapted them from Prof. Dk Lee (Unv. of Scence
Why System Evaluaton? Performance Evaluaton of Informaton Retreval Systems Many sldes n ths secton are adapted from Prof. Joydeep Ghosh (UT ECE) who n turn adapted them from Prof. Dk Lee (Unv. of Scence
Image Representation & Visualization Basic Imaging Algorithms Shape Representation and Analysis. outline
 mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
Very simple computational domains can be discretized using boundary-fitted structured meshes (also called grids)
") Structured meshes Very smple computatonal domans can be dscretzed usng boundary-ftted structured meshes (also called grds) The grd lnes of a Cartesan mesh are parallel to one another Structured meshes
Structured meshes Very smple computatonal domans can be dscretzed usng boundary-ftted structured meshes (also called grds) The grd lnes of a Cartesan mesh are parallel to one another Structured meshes
Outline. Type of Machine Learning. Examples of Application. Unsupervised Learning
 Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
AVO Modeling of Monochromatic Spherical Waves: Comparison to Band-Limited Waves
 AVO Modelng of Monochromatc Sphercal Waves: Comparson to Band-Lmted Waves Charles Ursenbach* Unversty of Calgary, Calgary, AB, Canada ursenbach@crewes.org and Arnm Haase Unversty of Calgary, Calgary, AB,
AVO Modelng of Monochromatc Sphercal Waves: Comparson to Band-Lmted Waves Charles Ursenbach* Unversty of Calgary, Calgary, AB, Canada ursenbach@crewes.org and Arnm Haase Unversty of Calgary, Calgary, AB,
Subspace clustering. Clustering. Fundamental to all clustering techniques is the choice of distance measure between data points;
 Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Analysis of 3D Cracks in an Arbitrary Geometry with Weld Residual Stress
 Analyss of 3D Cracks n an Arbtrary Geometry wth Weld Resdual Stress Greg Thorwald, Ph.D. Ted L. Anderson, Ph.D. Structural Relablty Technology, Boulder, CO Abstract Materals contanng flaws lke nclusons
Analyss of 3D Cracks n an Arbtrary Geometry wth Weld Resdual Stress Greg Thorwald, Ph.D. Ted L. Anderson, Ph.D. Structural Relablty Technology, Boulder, CO Abstract Materals contanng flaws lke nclusons
A Newton-Type Method for Constrained Least-Squares Data-Fitting with Easy-to-Control Rational Curves
 A Newton-Type Method for Constraned Least-Squares Data-Fttng wth Easy-to-Control Ratonal Curves G. Cascola a, L. Roman b, a Department of Mathematcs, Unversty of Bologna, P.zza d Porta San Donato 5, 4017
A Newton-Type Method for Constraned Least-Squares Data-Fttng wth Easy-to-Control Ratonal Curves G. Cascola a, L. Roman b, a Department of Mathematcs, Unversty of Bologna, P.zza d Porta San Donato 5, 4017
Compiler Design. Spring Register Allocation. Sample Exercises and Solutions. Prof. Pedro C. Diniz
 Compler Desgn Sprng 2014 Regster Allocaton Sample Exercses and Solutons Prof. Pedro C. Dnz USC / Informaton Scences Insttute 4676 Admralty Way, Sute 1001 Marna del Rey, Calforna 90292 pedro@s.edu Regster
Compler Desgn Sprng 2014 Regster Allocaton Sample Exercses and Solutons Prof. Pedro C. Dnz USC / Informaton Scences Insttute 4676 Admralty Way, Sute 1001 Marna del Rey, Calforna 90292 pedro@s.edu Regster
FEATURE EXTRACTION. Dr. K.Vijayarekha. Associate Dean School of Electrical and Electronics Engineering SASTRA University, Thanjavur
 FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
Dynamic wetting property investigation of AFM tips in micro/nanoscale
 Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
A mathematical programming approach to the analysis, design and scheduling of offshore oilfields
 17 th European Symposum on Computer Aded Process Engneerng ESCAPE17 V. Plesu and P.S. Agach (Edtors) 2007 Elsever B.V. All rghts reserved. 1 A mathematcal programmng approach to the analyss, desgn and
17 th European Symposum on Computer Aded Process Engneerng ESCAPE17 V. Plesu and P.S. Agach (Edtors) 2007 Elsever B.V. All rghts reserved. 1 A mathematcal programmng approach to the analyss, desgn and
Computer Graphics. - Spline and Subdivision Surfaces - Hendrik Lensch. Computer Graphics WS07/08 Spline & Subdivision Surfaces
 Computer Graphcs - Splne and Subdvson Surfaces - Hendrk Lensch Overvew Last Tme Image-Based Renderng Today Parametrc Curves Lagrange Interpolaton Hermte Splnes Bezer Splnes DeCasteljau Algorthm Parameterzaton
Computer Graphcs - Splne and Subdvson Surfaces - Hendrk Lensch Overvew Last Tme Image-Based Renderng Today Parametrc Curves Lagrange Interpolaton Hermte Splnes Bezer Splnes DeCasteljau Algorthm Parameterzaton
2-Dimensional Image Representation. Using Beta-Spline
 Appled Mathematcal cences, Vol. 7, 03, no. 9, 4559-4569 HIKARI Ltd, www.m-hkar.com http://dx.do.org/0.988/ams.03.3359 -Dmensonal Image Representaton Usng Beta-plne Norm Abdul Had Faculty of Computer and
Appled Mathematcal cences, Vol. 7, 03, no. 9, 4559-4569 HIKARI Ltd, www.m-hkar.com http://dx.do.org/0.988/ams.03.3359 -Dmensonal Image Representaton Usng Beta-plne Norm Abdul Had Faculty of Computer and
Lobachevsky State University of Nizhni Novgorod. Polyhedron. Quick Start Guide
 Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
Proper Choice of Data Used for the Estimation of Datum Transformation Parameters
 Proper Choce of Data Used for the Estmaton of Datum Transformaton Parameters Hakan S. KUTOGLU, Turkey Key words: Coordnate systems; transformaton; estmaton, relablty. SUMMARY Advances n technologes and
Proper Choce of Data Used for the Estmaton of Datum Transformaton Parameters Hakan S. KUTOGLU, Turkey Key words: Coordnate systems; transformaton; estmaton, relablty. SUMMARY Advances n technologes and
Lecture #15 Lecture Notes
 Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
Multi-Resolution Geometric Fusion
 Internatonal Conference on Recent Advances n 3-D Dgtal Imagng and Modellng, Ottawa, Canada May 12 15, 1997 Mult-Resoluton Geometrc Fuson Adran Hlton and John Illngworth Centre for Vson, Speech and Sgnal
Internatonal Conference on Recent Advances n 3-D Dgtal Imagng and Modellng, Ottawa, Canada May 12 15, 1997 Mult-Resoluton Geometrc Fuson Adran Hlton and John Illngworth Centre for Vson, Speech and Sgnal
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
NUMERICAL SOLVING OPTIMAL CONTROL PROBLEMS BY THE METHOD OF VARIATIONS
 ARPN Journal of Engneerng and Appled Scences 006-017 Asan Research Publshng Network (ARPN). All rghts reserved. NUMERICAL SOLVING OPTIMAL CONTROL PROBLEMS BY THE METHOD OF VARIATIONS Igor Grgoryev, Svetlana
ARPN Journal of Engneerng and Appled Scences 006-017 Asan Research Publshng Network (ARPN). All rghts reserved. NUMERICAL SOLVING OPTIMAL CONTROL PROBLEMS BY THE METHOD OF VARIATIONS Igor Grgoryev, Svetlana
Helsinki University Of Technology, Systems Analysis Laboratory Mat Independent research projects in applied mathematics (3 cr)
") Helsnk Unversty Of Technology, Systems Analyss Laboratory Mat-2.08 Independent research projects n appled mathematcs (3 cr) "! #$&% Antt Laukkanen 506 R ajlaukka@cc.hut.f 2 Introducton...3 2 Multattrbute
Helsnk Unversty Of Technology, Systems Analyss Laboratory Mat-2.08 Independent research projects n appled mathematcs (3 cr) "! #$&% Antt Laukkanen 506 R ajlaukka@cc.hut.f 2 Introducton...3 2 Multattrbute
THE PULL-PUSH ALGORITHM REVISITED
 THE PULL-PUSH ALGORITHM REVISITED Improvements, Computaton of Pont Denstes, and GPU Implementaton Martn Kraus Computer Graphcs & Vsualzaton Group, Technsche Unverstät München, Boltzmannstraße 3, 85748
THE PULL-PUSH ALGORITHM REVISITED Improvements, Computaton of Pont Denstes, and GPU Implementaton Martn Kraus Computer Graphcs & Vsualzaton Group, Technsche Unverstät München, Boltzmannstraße 3, 85748
Module 6: FEM for Plates and Shells Lecture 6: Finite Element Analysis of Shell
 Module 6: FEM for Plates and Shells Lecture 6: Fnte Element Analyss of Shell 3 6.6. Introducton A shell s a curved surface, whch by vrtue of ther shape can wthstand both membrane and bendng forces. A shell
Module 6: FEM for Plates and Shells Lecture 6: Fnte Element Analyss of Shell 3 6.6. Introducton A shell s a curved surface, whch by vrtue of ther shape can wthstand both membrane and bendng forces. A shell
Some Tutorial about the Project. Computer Graphics
 Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
CMPS 10 Introduction to Computer Science Lecture Notes
 CPS 0 Introducton to Computer Scence Lecture Notes Chapter : Algorthm Desgn How should we present algorthms? Natural languages lke Englsh, Spansh, or French whch are rch n nterpretaton and meanng are not
CPS 0 Introducton to Computer Scence Lecture Notes Chapter : Algorthm Desgn How should we present algorthms? Natural languages lke Englsh, Spansh, or French whch are rch n nterpretaton and meanng are not
6.854 Advanced Algorithms Petar Maymounkov Problem Set 11 (November 23, 2005) With: Benjamin Rossman, Oren Weimann, and Pouya Kheradpour
 With: Benjamin Rossman, Oren Weimann, and Pouya Kheradpour") 6.854 Advanced Algorthms Petar Maymounkov Problem Set 11 (November 23, 2005) Wth: Benjamn Rossman, Oren Wemann, and Pouya Kheradpour Problem 1. We reduce vertex cover to MAX-SAT wth weghts, such that the
6.854 Advanced Algorthms Petar Maymounkov Problem Set 11 (November 23, 2005) Wth: Benjamn Rossman, Oren Wemann, and Pouya Kheradpour Problem 1. We reduce vertex cover to MAX-SAT wth weghts, such that the
Overview. Basic Setup [9] Motivation and Tasks. Modularization 2008/2/20 IMPROVED COVERAGE CONTROL USING ONLY LOCAL INFORMATION
![Overview. Basic Setup [9] Motivation and Tasks. Modularization 2008/2/20 IMPROVED COVERAGE CONTROL USING ONLY LOCAL INFORMATION](/thumbs/89/100766536.jpg "Overview. Basic Setup [9] Motivation and Tasks. Modularization 2008/2/20 IMPROVED COVERAGE CONTROL USING ONLY LOCAL INFORMATION") Overvew 2 IMPROVED COVERAGE CONTROL USING ONLY LOCAL INFORMATION Introducton Mult- Smulator MASIM Theoretcal Work and Smulaton Results Concluson Jay Wagenpfel, Adran Trachte Motvaton and Tasks Basc Setup
Overvew 2 IMPROVED COVERAGE CONTROL USING ONLY LOCAL INFORMATION Introducton Mult- Smulator MASIM Theoretcal Work and Smulaton Results Concluson Jay Wagenpfel, Adran Trachte Motvaton and Tasks Basc Setup
Real-time Motion Capture System Using One Video Camera Based on Color and Edge Distribution
 Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
An Application of the Dulmage-Mendelsohn Decomposition to Sparse Null Space Bases of Full Row Rank Matrices
 Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Solving two-person zero-sum game by Matlab
 Appled Mechancs and Materals Onlne: 2011-02-02 ISSN: 1662-7482, Vols. 50-51, pp 262-265 do:10.4028/www.scentfc.net/amm.50-51.262 2011 Trans Tech Publcatons, Swtzerland Solvng two-person zero-sum game by
Appled Mechancs and Materals Onlne: 2011-02-02 ISSN: 1662-7482, Vols. 50-51, pp 262-265 do:10.4028/www.scentfc.net/amm.50-51.262 2011 Trans Tech Publcatons, Swtzerland Solvng two-person zero-sum game by
VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
 UbCC 2011, Volume 6, 5002981-x manuscrpts OPEN ACCES UbCC Journal ISSN 1992-8424 www.ubcc.org VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
UbCC 2011, Volume 6, 5002981-x manuscrpts OPEN ACCES UbCC Journal ISSN 1992-8424 www.ubcc.org VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
Simplification of 3D Meshes
 Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
The Theory and Application of an Adaptive Moving Least. Squares for Non-uniform Samples
 Xanpng Huang, Qng Tan, Janfe Mao, L Jang, Ronghua Lang The Theory and Applcaton of an Adaptve Movng Least Squares for Non-unform Samples Xanpng Huang, Qng Tan, Janfe Mao*, L Jang, Ronghua Lang College
Xanpng Huang, Qng Tan, Janfe Mao, L Jang, Ronghua Lang The Theory and Applcaton of an Adaptve Movng Least Squares for Non-unform Samples Xanpng Huang, Qng Tan, Janfe Mao*, L Jang, Ronghua Lang College
Data Representation in Digital Design, a Single Conversion Equation and a Formal Languages Approach
 Data Representaton n Dgtal Desgn, a Sngle Converson Equaton and a Formal Languages Approach Hassan Farhat Unversty of Nebraska at Omaha Abstract- In the study of data representaton n dgtal desgn and computer
Data Representaton n Dgtal Desgn, a Sngle Converson Equaton and a Formal Languages Approach Hassan Farhat Unversty of Nebraska at Omaha Abstract- In the study of data representaton n dgtal desgn and computer
Concurrent Apriori Data Mining Algorithms
 Concurrent Apror Data Mnng Algorthms Vassl Halatchev Department of Electrcal Engneerng and Computer Scence York Unversty, Toronto October 8, 2015 Outlne Why t s mportant Introducton to Assocaton Rule Mnng
Concurrent Apror Data Mnng Algorthms Vassl Halatchev Department of Electrcal Engneerng and Computer Scence York Unversty, Toronto October 8, 2015 Outlne Why t s mportant Introducton to Assocaton Rule Mnng
A new segmentation algorithm for medical volume image based on K-means clustering
 Avalable onlne www.jocpr.com Journal of Chemcal and harmaceutcal Research, 2013, 5(12):113-117 Research Artcle ISSN : 0975-7384 CODEN(USA) : JCRC5 A new segmentaton algorthm for medcal volume mage based
Avalable onlne www.jocpr.com Journal of Chemcal and harmaceutcal Research, 2013, 5(12):113-117 Research Artcle ISSN : 0975-7384 CODEN(USA) : JCRC5 A new segmentaton algorthm for medcal volume mage based
Unsupervised Learning
 Pattern Recognton Lecture 8 Outlne Introducton Unsupervsed Learnng Parametrc VS Non-Parametrc Approach Mxture of Denstes Maxmum-Lkelhood Estmates Clusterng Prof. Danel Yeung School of Computer Scence and
Pattern Recognton Lecture 8 Outlne Introducton Unsupervsed Learnng Parametrc VS Non-Parametrc Approach Mxture of Denstes Maxmum-Lkelhood Estmates Clusterng Prof. Danel Yeung School of Computer Scence and
Scan Conversion & Shading
 Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Analysis on the Workspace of Six-degrees-of-freedom Industrial Robot Based on AutoCAD
 Analyss on the Workspace of Sx-degrees-of-freedom Industral Robot Based on AutoCAD Jn-quan L 1, Ru Zhang 1,a, Fang Cu 1, Q Guan 1 and Yang Zhang 1 1 School of Automaton, Bejng Unversty of Posts and Telecommuncatons,
Analyss on the Workspace of Sx-degrees-of-freedom Industral Robot Based on AutoCAD Jn-quan L 1, Ru Zhang 1,a, Fang Cu 1, Q Guan 1 and Yang Zhang 1 1 School of Automaton, Bejng Unversty of Posts and Telecommuncatons,
Course Introduction. Algorithm 8/31/2017. COSC 320 Advanced Data Structures and Algorithms. COSC 320 Advanced Data Structures and Algorithms
 Course Introducton Course Topcs Exams, abs, Proects A quc loo at a few algorthms 1 Advanced Data Structures and Algorthms Descrpton: We are gong to dscuss algorthm complexty analyss, algorthm desgn technques
Course Introducton Course Topcs Exams, abs, Proects A quc loo at a few algorthms 1 Advanced Data Structures and Algorthms Descrpton: We are gong to dscuss algorthm complexty analyss, algorthm desgn technques
Wavefront Reconstructor
 A Dstrbuted Smplex B-Splne Based Wavefront Reconstructor Coen de Vsser and Mchel Verhaegen 14-12-201212 2012 Delft Unversty of Technology Contents Introducton Wavefront reconstructon usng Smplex B-Splnes
A Dstrbuted Smplex B-Splne Based Wavefront Reconstructor Coen de Vsser and Mchel Verhaegen 14-12-201212 2012 Delft Unversty of Technology Contents Introducton Wavefront reconstructon usng Smplex B-Splnes
 Chapter 6 Programmng the fnte element method Inow turn to the man subject of ths book: The mplementaton of the fnte element algorthm n computer programs. In order to make my dscusson as straghtforward
Chapter 6 Programmng the fnte element method Inow turn to the man subject of ths book: The mplementaton of the fnte element algorthm n computer programs. In order to make my dscusson as straghtforward
2D Raster Graphics. Integer grid Sequential (left-right, top-down) scan. Computer Graphics
 scan. Computer Graphics") 2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
Scan Conversion & Shading
 1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Cell Count Method on a Network with SANET
 CSIS Dscusson Paper No.59 Cell Count Method on a Network wth SANET Atsuyuk Okabe* and Shno Shode** Center for Spatal Informaton Scence, Unversty of Tokyo 7-3-1, Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
CSIS Dscusson Paper No.59 Cell Count Method on a Network wth SANET Atsuyuk Okabe* and Shno Shode** Center for Spatal Informaton Scence, Unversty of Tokyo 7-3-1, Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
Computer models of motion: Iterative calculations
 Computer models o moton: Iteratve calculatons OBJECTIVES In ths actvty you wll learn how to: Create 3D box objects Update the poston o an object teratvely (repeatedly) to anmate ts moton Update the momentum
Computer models o moton: Iteratve calculatons OBJECTIVES In ths actvty you wll learn how to: Create 3D box objects Update the poston o an object teratvely (repeatedly) to anmate ts moton Update the momentum
An Image Fusion Approach Based on Segmentation Region
 Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Mathematics 256 a course in differential equations for engineering students
 Mathematcs 56 a course n dfferental equatons for engneerng students Chapter 5. More effcent methods of numercal soluton Euler s method s qute neffcent. Because the error s essentally proportonal to the
Mathematcs 56 a course n dfferental equatons for engneerng students Chapter 5. More effcent methods of numercal soluton Euler s method s qute neffcent. Because the error s essentally proportonal to the
Virtual Machine Migration based on Trust Measurement of Computer Node
 Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
PRÉSENTATIONS DE PROJETS
 PRÉSENTATIONS DE PROJETS Rex Onlne (V. Atanasu) What s Rex? Rex s an onlne browser for collectons of wrtten documents [1]. Asde ths core functon t has however many other applcatons that make t nterestng
PRÉSENTATIONS DE PROJETS Rex Onlne (V. Atanasu) What s Rex? Rex s an onlne browser for collectons of wrtten documents [1]. Asde ths core functon t has however many other applcatons that make t nterestng
Solutions to Programming Assignment Five Interpolation and Numerical Differentiation
 College of Engneerng and Coputer Scence Mechancal Engneerng Departent Mechancal Engneerng 309 Nuercal Analyss of Engneerng Systes Sprng 04 Nuber: 537 Instructor: Larry Caretto Solutons to Prograng Assgnent
College of Engneerng and Coputer Scence Mechancal Engneerng Departent Mechancal Engneerng 309 Nuercal Analyss of Engneerng Systes Sprng 04 Nuber: 537 Instructor: Larry Caretto Solutons to Prograng Assgnent