Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition
|
|
|
- Rosalind Roberts
- 5 years ago
- Views:
Transcription
1 Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition Xiao Liu, Jiang Wang, Shilei Wen, Errui Ding, Yuanqing Lin Baidu Research {liuxiao12, wenshilei, dingerrui, Abstract A key challenge in fine-grained recognition is how to find and represent discriminative local regions. Recent attention models are capable of learning discriminative region localizers only from category labels with reinforcement learning. However, not utilizing any explicit part information, they are not able to accurately find multiple distinctive regions. In this work, we introduce an attribute-guided attention localization scheme where the local region localizers are learned under the guidance of part attribute descriptions. By designing a novel reward strategy, we are able to learn to locate regions that are spatially and semantically distinctive with reinforcement learning algorithm. The attribute labeling requirement of the scheme is more amenable than the accurate part location annotation required by traditional part-based fine-grained recognition methods. Experimental results on the CUB dataset (Wah et al. 2011) demonstrate the superiority of the proposed scheme on both fine-grained recognition and attribute recognition. Introduction Humans heavily rely on subtle local visual cues to distinguish fine-grained object categories. For example in Figure (a), human experts differentiate a summer tanager and a scarlet tanager by the color of wing and tail. In order to build human-level fine-grained recognition AI systems, it is also essential to locate discriminative object parts and learn local visual representation for these parts. State-of-the-art fine-grained recognition methods (Zhang et al. 2014; Liu, Shen, and Hengel 2015; Wang et al. 2014; Krause et al. 2015b; 2015a; Gao et al. 2015; Zhang et al. 2016a) either rely on manually labeled parts to train part detectors in a fully supervised manner, or employ reinforcement learning or spatial-transformer-based attention models (Sermanet, Frome, and Real 2015; Liu et al. 2016b; Zhao et al. 2016) to locate object parts with object category annotations in a weakly supervised manner. However, both types of methods have major practical limitations. Fully supervised methods need time-consuming, error-probing manual object part labeling process, while object labels alone as a supervision signal is generally too weak to reliably Equal contribution. Copyright c 2017, Association for the Advancement of Artificial Intelligence ( All rights reserved. locate multiple discriminative object parts. For example in Figure (b), the method (Liu et al. 2016b) fails to locate the tail as attention regions. Humans have a remarkable ability to learn to locate object parts from multiple sources of information. Aside from strongly labeled object part location and weakly labeled object categories, part descriptions, such as red wing, also plays an important part in the development of object parts locating ability. In their early ages, children learn to recognize parts and locate object parts by reading or listening to part descriptions. Part descriptions do not require timeconsuming manually part location labeling, and it is much stronger than object category labels. We call it part attribute. Inspired by this capability, we propose a part attributeguided attention localization scheme for fine-grained recognition. Using part attributes as a weak supervision training signal, reinforcement learning is able to learn part-specific optimal localization strategies given the same image as environment state. Based on this intuition, it is reasonable to expect that distinctive part localizers could be learned as strategies of looking for and describing the appearances of different parts. In the proposed scheme, multiple fully convolutional attention localization networks are trained. Each network predicts the attribute values of a part. We design a novel reward strategy for learning part localizers and part attribute predictors. Part attribute-guided attention localization networks can more accurately locate object parts (Figure (c)). More importantly, using the part locations and appearance features from part-attribute guided attention localization networks leads to considerable performance improvement on finegrained recognition, as demonstrated on the CUB dataset (Wah et al. 2011). Moreover, part attribute can be acquired in large scale via either human labeling or data mining techniques. It has been successfully employed for image recognition (Parikh and Grauman 2011; Akata et al. 2013; Hwang and Sigal 2014), image retrieval (Huang et al. 2015), face localization (Liu et al. 2015) and image generation (Yan et al. 2015). Attention model (Mnih et al. 2014; Ba, Mnih, and Kavukcuoglu 2015) has been widely used in image caption (Xu and Saenko 2015; Xu et al. 2015), image recognition (Zhang et al. 2016b; Seo et al. 2016), action recognition (Wang et al. 2016), person re-identification (Liu et 4190
2 al. 2016a) and image parsing (Fan et al. 2016). To our best knowledge, no one has utilized part attribute to guide the learning of visual attention in fine-grained recognition. Attribute-Guided Attention Localization The architecture of the proposed scheme is shown in Figure 2. Attribute descriptions are only used for learning part localizers during training. They are not used in the testing stage. In the training stage, a fully-convolutional attention localization network (Liu et al. 2016b) is learned for each part. In contrast with (Liu et al. 2016b), the task of the fully-convolutional attention localization network is to learn where to look for better part attribute prediction rather than predicting the category of the entire object. For testing, we extract features from both part regions located by the network and the entire image and concatenate them as a joint representation. The joint representation is utilized to predict the image category. Problem Formulation Given N training images {x 1,x 2,...,x N }, and their object labels {l 1,l 2,...,l N }. Our goal is to train a model for classifying each image x i as its ground-truth label l i. Fine-grained objects have P parts. Localizing by describing problem finds a policy to locate the parts and to classify images based on these part locations and their features. The objective can be formulated as: L 0 = L(G(x i, F 1 (x i ),...,F P (x i )),l i ), (1) i where F p ( ) is a function that finds the location of part p and crops its image region. The crop size of each part is manually defined. G( ) is a deep convolutional neural network classifier that outputs the probability of each category given the whole image and the cropped image regions for all the parts. L(.) is cross-entropy loss function measuring the quality of the classification. Precisely predicting part locations using only the image labels is very challenging. In localizing by describing, we localize object parts with the help of visual attribute descriptions. The visual attribute is a set of binary annotations whose value correlates with an aspect of the object appearance. A local attribute is generally related to the appearance of an object part. The attribute description of the p-th part is denoted as {Y p 1,Yp 2,...,Yp p N }. Each part description Yi is a binary vector: [y p i,1,yp i,2,...,yp i,k p ], where each element y p i,k indicates whether an attribute exists in the i-th image, and K p is the number of attributes for the p-th part. We aim to learn better part localizers F p using part attribute annotation. An auxiliary part attribute classification loss is proposed to facilitate the learning of part localizers L p = i L (T p (F p (x i )),Y p i ), (2) where T p (.) = [T p,1 (.),...,T p,kp (.)] is a multi-label attribute prediction function of the p-th part, and each T p,k (.) indicates the predicted probability of the k-th attribute of part p. L (.) is a multi-label cross-entropy loss L (X i,y p i )= [y p i,k log T p,k(f p (x i )) k +(1 y p i,k )log(1 T p,k(f p (x i )))]. (3) The assumption is that the part localizers that help predict part attributes are also beneficial to the prediction of the whole object. We use Eq. (3) as an auxiliary loss to learn localizer F p ( ) that optimizes Eq.(1). Training of Localizers Given images and attribute descriptions, we jointly learn a part localizer and a multi-label predictor for each part such that the predictor uses the selected local region for attribute prediction. Since the localization operation is non-differential, we employ reinforcement learning algorithm (Williams 1992) to learn the part localizers and multi-label predictors. For reinforcement learning algorithm, the policy function is the part localizer function F p ( ); the state is the cropped local image patch F p (x i ) and the whole image x i ; the reward function measures the quality of the part attribute. The objective function of the reinforcement learning algorithm for part p is J p (F p, T p )= [ EFp (R p,i ) λl (T p (F p (x i )),Y p i )], i (4) where the reward E Fp (R p,i )= p Fp (s p,i x i )r(s p,i )d(s p,i ) (5) s p,i is the expected reward of the selected region for the p- th part of the i-th image. s p,i indicates a selected region, p Fj (s p,i x i ) is the probability that the localizer select the region s p,i. r(s p,i ) is a reward function to evaluate the contribution of the selected region s p,i to attribute prediction. Previous methods (Sermanet, Frome, and Real 2015; Liu et al. 2016b) choose the reward function r(s p,i ) to be 1 only when the image is correctly classified. However, since our algorithm predicts multiple attribute values for a part, it is too strict to enforce all the attributes are correctly predicted. Therefore, we consider an alternative reward strategy. A selected region has reward 1 if both of the following criteria are satisfied: 1) it achieves lower attribute classification loss than most other regions in the same image, i.e., its prediction loss ranks top-η lowest among the M sampled regions of the image. 2) it achieves lower attribute classification loss than most other regions in the same mini-batch, i.e., its prediction loss is lower than half of the average loss of all the regions in the mini-batch. Following (Liu et al. 2016b), we learn fully convolutional attention localization networks as part localizers. Since both parts of the objective function Eq. (4) are differentiable, RE- INFORCE algorithm (Williams 1992) is applied to compute 4191
3 (b) (a) (c) Figure 1: (a) Two types of birds with part-attribute descriptions. Human experts differentiate a summer tanager and a scarlet tanager by the color of wing and tail. (b) (Liu et al. 2016b) fails to locate the tail part. (c) Part-attribute-guided attention localization networks can locate object parts more accurately. The red, green, purple and blue bounding boxes localize head, breast, wing and tail, respectively (best viewed in color). has pattern plain has color red has color red shaped Figure 2: An overview architecture of the proposed scheme. The correspondence of color and part is the same as Fig. 1. The upper part shows training stage, and the lower part shows the testing stage. In the training stage, multiple part localizers are trained under the guidance of attribute descriptions. In the testing stage, features extracted from the selected part regions and the entire image are combined into a joint representation for category prediction. the policy gradient to optimize the objective function: Fp E Fp (R p,i ) (6) = p Fp (s p,i x i ) Fp log[p Fp (s p,i x j )r(s p,i )]d(s p,i ) s p,i 1 M Fp log[p Fp (s m M p,i x i )r(s m p,i)] m=1 where s m i,j p F i ( x j ) is the local image regions sampled according to localizer policy p Fi (s m i,j x j). M local regions of the same image are sampled in a mini-batch. We list the learning algorithm in Algorithm 1. Training of Classifiers After the local region localizers are trained, we re-trained the attribute prediction models using up-scaled local regions. When re-trained, the attribute predictors takes up-scaled local regions from the part localizers to predict the attributes. To combine global and local information, we extract features from all the part regions and the entire image and concatenate them to form a joint representation. The joint representation is used to predict image category. In details, we first train classifiers with each individual part region to capture the appearance details of local parts for fine-grained recognition. A classifier utilizing the entire image is also trained for global information. We then concatenate features extracted from all the parts and the entire image as a joint representation, and we use a linear layer to combine the fea- 4192
4 Algorithm 1 Localizing by describing algorithm: Input: training images {x 1,x 2,...,x N }, attribute descriptions of each part {Y p 1,Yp 2,...,Yp N }. Output: part localization function F, multi-label attribute prediction function T. 1: for each part p do 2: Initialize F p and T p. 3: repeat 4: Randomly sample H images. 5: for each image x i do 6: Sample s m p,i p F p ( x i ) 7: end for 8: for each local region s m p,i do 9: Calculate lp,i m = L (T p (s m p,i ),Yp i ). 10: end for 11: Calculate ˆL = lp,i m. 12: for each image x i do 13: Sort lp,i m in ascending order. 14: for each local region s m p,i do 15: if lp,i m is in the top-η position of the sorted list, and lp,i m < 0.5ˆL then 16: 17: Set reward r(s m p,i )=1. else 18: 19: Set reward r(s m p,i )=0. end if 20: end for 21: end for 22: Calculate the gradient of F p according to (6). 23: Calculate the gradient of T p. 24: Update the parameters of F p and T p. 25: until converge 26: end for tures. Prediction The prediction process is illustrated in the lower part of Fig. 2. We localize and crop each part using its localizer F p (x i ), and each part region is resized to high resolution for feature extraction. Features from all part regions as well as the entire image are concatenated as a joint representation. A linear classification layer is utilized to make the final category prediction. We also attempt to use attribute prediction results to help fine-grained object recognition, or model the geometric relationship of the parts using recurrent convolutional operation. However, we find neither of the approaches achieve notable improvements in our experiments. Detailed experimental results and setup can be found in the experimental section. Experiments We conduct experiments on the CUB datasets (Wah et al. 2011). The dataset contains 11, 788 images of 200 bird categories, where 5, 994 images are for training, and the rest 5, 794 images are for testing. In addition to the category label, 15 part locations, 312 binary attributes and a tight bounding box of the bird is provided for each image. Examples of images and attributes in this dataset are shown in Figure (a). Implementation Details We evaluate the proposed scheme in two scenarios: with BB where the object bounding box is utilized during training and testing, and without BB where the object bounding-box is not utilized. We choose 4 parts, i.e. head, wing, breast, and tail, to train local region localizers. The cropping size of these parts are half of the original image. Among all the 312 attributes, if a part name appears in an attribute, then the attribute is considered describing this part. The number of attributes describing the four parts are 29, 24, 19, and 40, respectively. We utilize ResNet-50 (He et al. 2016) as the visual representation for part localization and feature extraction. In the training stage, we utilize the ROI-pooled feature maps (in the with BB setting, crop the image region within the bounding box) to learn multi-label attribute predictions for each part. The output of the res5c layer of ResNet-50 is employed as the input of the fully convolutional attention localization networks. The attribute predictors use ROI-pooled feature maps (Girshick 2015) of the fully convolutional attention localizers. We train the models using Stochastic Gradient Descent (SGD) with momentum of 0.9, epoch number of 150, weight decay of 0.001, and a mini-batch size of 28 on four K40 GPUs. One epoch means all training samples are passed through once. An additional dropout layer with an ratio of 0.5 is added after res5c, and the size of fc15 is changed from 1000 to 200. The parameters before res5c are initialized by the model (He et al. 2016) pretrained on the ImageNet dataset (Deng et al. 2009), and parameters of fc15 are randomly initialized. The initial learning rate is set at and reduced twice with a ratio of 0.1 after 50 and 100 epoches. The learning rate of the last layer ( fc15 ) is 10 times larger than other layers. Our data augmentation is similar to (Szegedy et al. 2014), but we have more types of data augmentation. A training image is first rotated with a random angle between 30 and 30. A cropping is then applied on the rotated image. The size of the cropped patch is chosen randomly between 25% and 100% of the whole image, and its aspect ratio is chosen randomly between 3/4 and 4/3. AlexNet-style color augmentation (Krizhevsky, Sutskever, and Hinton 2012) is also applied followed by random flip. We finally resize the transformed cropped patch to a image as the input of the convolutional neural network. Part Localization Results We report our part localization results in Table 1. Percent Correct Parts (PCP) is used as the evaluation metric. A part is determined to be correctly localized if the difference of its predicted location and the ground-truth location is within 1.5 times the ground-truth annotations standard deviation. 4193
5 Method head breast wing tail ave (Shih et al. 2015) (Liu and Belhumeur 2013) (Liu, Li, and Belhumeur 2014) Ours (without BB) Ours (with BB) Table 1: Part localization results (measured by PCP) on the CUB dataset. We compare with previous state-of-the-art part localization methods (Shih et al. 2015; Liu and Belhumeur 2013; Liu, Li, and Belhumeur 2014). The strongly supervised method (Shih et al. 2015), which utilizes the precise location of the parts during training, achieves the highest average PCP (71.4) in the without BB scenario. Our scheme that does not use any part or object locations achieves the second highest average PCP (66.2) and performs the best for localizing breast. The parts are localized much more precisely ( ) when ground-truth bird bounding boxes is used. Figure 3 provides visualizations of our part localization results. Ground-truth part locations are shown as hollow circles, predicted part locations are shown as solid circles and the selected part regions are shown as thumbnails. It should be noted that different from (Shih et al. 2015), our scheme does not directly minimize the part localization error but learns part localizers for attribute prediction. Thus, a selected region that is far from manually annotation might better predict some part attributes. For example, our predicted head positions are usually in the center of the bird head such that the cropped local region does not lose any information, while the manually annotated head positions normally appear on the forehead. Attribute Prediction Results The attribute prediction results measured by average Area Under the Curve of ROC (AUC) are reported in Table 2. We use AUC instead of accuracy because the data of attributes are highly imbalanced: most attributes are only activated in a very small number of images, but some attributes appear very frequently. For each part, we calculate the AUC of all its attributes, and report the average AUC of them as the AUC of the part. Directly utilizing the full image as input achieves 76.8, 78.7, 73.1, and 70.4 average AUC for parts head, breast, wing and tail, respectively. The overall average AUC of the four parts is Using the localized local regions results in slight performance drop ( ) on overall average AUC. The prediction using both the full image and the local attention regions improves the overall average AUC result to Bounding boxes of birds are not used for attribute prediction. Fine-grained Recognition Results For without BB scenario, the baseline ResNet-50 using the whole image achieves 81.7% recognition accuracy. Adding features of two parts ( head and breast ) improves the result to 84.7% and combing features of four parts improves Method head breast wing tail total Full image Attention Image + Attention Table 2: Attribute prediction results (measured by average AUC) on the CUB dataset. the result to 85.1%. For with BB scenario, the baseline achieves 82.3% accuracy. Combing features of two parts improves the result to 84.9%, and combing all the features improves the accuracy to 85.3%. Using features of GoogLeNet (Ioffe and Szegedy 2015) and VGGNet (Simonyan and Zisserman 2014) achieves 85.1% and 84.0%, respectively. We carry out further experiments to explore using the attributes for better recognition. In the full image + attribute value experiment, we concatenate 112 binary attribute labels with the original visual feature of the whole image to predict the bird category. In the full image + attribute feature experiment, we concatenate the visual features of the 5 part attribute prediction models: one is the original full image model, and the other four models are fine-tuned for predicting the attributes of the four parts. As Table 3 shows, directly combining attribute values does not improve recognition accuracy compared with the baseline. Combing attribute features leads to marginal improvements (81.7% 82.5% and 82.3% 82.9%), because we find the attribute predictions are usually noisy due to the inherent difficulty of predicting some local attributes. By combining features from the full image model, four part-based models and the attribute prediction models, we achieve the 85.4% and 85.5% for the without BB and with BB scenarios, respectively. We also explore jointly training the part localizers using a recurrent convolutional neural network model as geometric regularization of part locations (Tompson et al. 2014), but we find the accuracy improvement is negligible (85.1% 85.2% without BB). After examining the data, we find birds poses are too diverse to learn an effective geometric model from limited amount of data. We compare with previous state-of-the-art methods on this dataset and summarize the recognition results in Table 3. (Zhang et al. 2014) train part-based R-CNN model to detect the head and body of the bird. The method relies on part location annotation during training. Our scheme outperforms (Zhang et al. 2014) and other part-based models (Simon and Rodner 2015; Zhang et al. 2015) by a large margin without requiring strongly supervised part location annota- 4194








 (Lin,")
 84.1 85.")

 82.0 84.")
 84.1 - (Zhang et al.")
")



























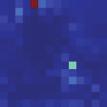
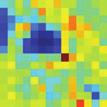

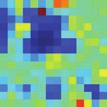




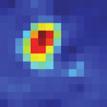


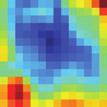
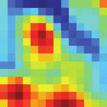
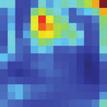
6 Figure 3: Visualizations of part localization results. Ground-truth part locations are shown as hollow circles; predicted part locations are shown as solid circles; selected part regions are shown as thumbnails. Different parts are shown in different colors. No ground-truth bird bounding boxes or part locations are used during training or testing time in the proposed method. Method Acc without BB(%) Acc with BB(%) (Lin, RoyChowdhury, and Maji 2015) (Krause et al. 2015a) (Zhang et al. 2014) (Liu et al. 2016b) (Jaderberg et al. 2015) (Zhang et al. 2015) (Simon and Rodner 2015) Full Image Full Image + 2 parts Full Image + 4 parts Full Image + attribute value Full Image + attribute feature Full Image + 4 parts + attribute feature Table 3: Recognition results on the CUB dataset with different settings. tion. (Lin, RoyChowdhury, and Maji 2015) construct high dimensional bilinear feature vectors, and achieve 84.1% and 85.1% accuracy for the without BB and with BB scenarios, respectively. (Krause et al. 2015a) learn and combine multiple latent parts in a weakly supervised manner, and achieve 82.0% and 82.8% accuracy for the without BB and with BB scenarios, respectively. (Liu et al. 2016b) utilize the fully convolutional attention localization networks to select two local parts for model combination. The accuracy is 82.0% without bounding box and84.3% with bounding box, while our accuracy is 84.7% without bounding box and 84.9% with bounding box by combing features from two local parts ( head and breast ). Localizing distinctive parts leads to better recognition accuracy. Similarly, (Jaderberg et al. 2015) combine features of four local parts and achieve an accuracy of 84.1% without using bounding box. Our scheme using the same number of parts outperforms it by 1% (84.1% 85.1%). Reward Strategy Visualization The rewards during reinforcement learning algorithm are visualized in Figure 4. From left to right, we show the heatmaps of 1st, 40-th, 80-th, 120-th, 160-th, and 200-th iterations for multi-label attribute prediction loss, rewards and the output probability of the localizer. As can be seen, after an initial divergence on localizer probability map, the output of the localizer converges to the head position during training as expected. Figure 4: Our algorithm uses 200 iterations to locate head of the bird in the left part. The top row in the right part shows the multi-label attribute prediction loss at different positions, and a lighter position has higher loss. The middle row shows the rewards at different positions. The localizer is encouraged to focus on the light position. The bottom row shows the probability map of the localizer. Lighter positions indicate larger probability of localization. Conclusion In this paper, we present an attention localization scheme for fine-grained recognition that learns part localizers from its attribute descriptions. An efficient reinforcement learn- 4195
7 ing scheme is proposed for this task. The proposed scheme consists of a reward function for encouraging different part localizers to capture complementary information. It is also highly computationally efficient when the number of attributes and parts is large. Comprehensive experiments show that our scheme obtains good part localization, improves attribute prediction, and demonstrates significant performance improvement on fine-grained recognition. In the future, we will continue our efforts to improve the models of geometric part location regularization. References Akata, Z.; Perronnin, F.; Harchaoui, Z.; and Schmid, C Label-embedding for attribute-based classification. Proc. ECCV. Ba, J.; Mnih, V.; and Kavukcuoglu, K Multiple object recognition with visual attention. arxiv: v2. Deng, J.; Dong, W.; Socher, R.; Li, L.; Li, K.; and Fei-Fei, L Imagenet: A large-scale hierarchical image database. Proc. CVPR. Fan, H.; Mei, X.; Prokhorov, D.; and Ling, H Hierarchical attention network for action recognition in videos. arxiv: Gao, Y.; Beijbom, O.; Zhang, N.; and Darrell, T ompact bilinear pooling. arxiv: Girshick, R Fast r-cnn. arxiv preprint arxiv: He, K.; Zhang, X.; Ren, S.; and Sun, J Deep residual learning for image recognition. Proc. CVPR. Huang, J.; Feris, R. S.; Chen, Q.; and Yan, S Cross-domain image retrieval with a dual attribute-aware ranking network. Proc. ICCV. Hwang, S. J., and Sigal, L A unified semantic embedding: Relating taxonomies and attributes. Proc. NIPS. Ioffe, S., and Szegedy, C Batch normalization: accelerating deep network training by reducing internal covariate shift. Proc. ICML. Jaderberg, M.; Simonyan, K.; Zisserman, A.; and Kavukcuoglu, K Spatial transformer networks. Proc. NIPS. Krause, J.; Jin, H.; Yang, J.; and Fei-Fei, L. 2015a. Fine-grained recognition without part annotations. Proc. CVPR. Krause, J.; Sapp, B.; Howard, A.; Zhou, H.; Toshev, A.; Duerig, T.; Philbin, J.; and Fei-Fei, L. 2015b. The unreasonable effectiveness of noisy data for fine-grained recognition. arxiv: v1. Krizhevsky, A.; Sutskever, I.; and Hinton, G. E Imagenet classification with deep convolutional neural networks. Proc. NIPS. Lin, T.; RoyChowdhury, A.; and Maji, S Bilinear cnn models for fine-grained visual recognition. Proc. ICCV. Liu, J., and Belhumeur, P Bird part localization using exemplar-based models with enforced pose and subcategory consistency. Proc. ICCV. Liu, Z.; Luo, P.; Wang, X.; and Tang, X Deep learning face attributes in the wild. Proc. ICCV. Liu, H.; Feng, J.; Qi, M.; Jiang, J.; and Yan, S. 2016a. Endto-end comparative attention networks for person re-identification Liu, X.; Xia, T.; Wang, J.; and Lin, Y. 2016b. Fully convolutional attention localization networks: efficient attention localization for fine-grained recognition. arxiv: Liu, J.; Li, Y.; and Belhumeur, P Part-pair representation for part localization. Proc. ECCV. Liu, L.; Shen, C.; and Hengel, A The treasure beneath convolutional layers: cross-convolutional-layer pooling for image classification. Proc. CVPR. Mnih, V.; Heess, N.; Graves, A.; and Kavukcuoglu, K Recurrent models of visual attention. Proc. NIPS. Parikh, D., and Grauman, K Relative attributes. Proc. ICCV. Seo, P. H.; Lin, Z.; Cohen, S.; Shen, X.; and Han, B Hierarchical attention networks. arxiv: Sermanet, P.; Frome, A.; and Real, E Attention for finegrained categorization. arxiv: v3. Shih, K.; Mallya, A.; Singh, S.; and Hoiem, D Partlocalization using multi-proposal consensus for fine-grained categorization. Proc. BMVC. Simon, M., and Rodner, E Neural activation constellations: Unsupervised part model discovery with convolutional networks. ICCV. Simonyan, K., and Zisserman, A Very deep convolutional networks for large-scale image recognition. arxiv: Szegedy, C.; Liu, W.; Jia, Y.; Sermannet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; and Rabinovich, A Going deeper with convolutions. arxiv: Tompson, J.; Jain, A.; LeCun, Y.; and Bregler, C Joint training of a convolutional network and a graphical model for human pose estimation. Proc. NIPS. Wah, C.; Branson, S.; Welinder, P.; Perona, P.; and Belongie, S The caltech-ucsd birds dataset. Wang, X.; Yang, T.; Chen, G.; and Lin, Y Object-centric sampling for fine-grained image classification. arxiv: Wang, Y.; Wang, S.; Tang, J.; O Hare, N.; Chang, Y.; and Li, B Hierarchical attention network for action recognition in videos. arxiv: Williams, R Simple statistical gradient-following algorithms for connectionist reinforcement learning. Machine Learning. Xu, H., and Saenko, K Ask, attend and answer: Exploring question-guided spatial attention for visual question answering. arxiv: Xu, K.; Ba, J.; Kiros, R.; Cho, K.; Courville, A.; Salakhutdinov, R.; Zemel, R.; and Bengio, Y Show, attend and tell: Neural image caption generation with visual attention. arxiv: Yan, X.; Yang, J.; Sohn, K.; and Lee, H Attribute2image: Conditional image generation from visual attributes. arxiv: Zhang, N.; Donahue, J.; Girshick, R.; and Darrell, T Partbased r-cnns for fine-grained category detection. Proc. ECCV. Zhang, Y.; shen Wei, X.; Wu, J.; Cai, J.; Lu, J.; Nguyen, V.-A.; and Do, M. N Weakly supervised fine-grained image categorization. arxiv: Zhang, H.; Xu, T.; Elhoseiny, M.; Huang, X.; Zhang, S.; Elgamnal, A.; and Metaxas, D. 2016a. Spda-cnn: Unifying semantic part detection and abstraction for fine-grained recognition. Proc. CVPR. Zhang, J.; Lin, Z.; Brandt, J.; Shen, X.; and Sclaroff, S. 2016b. Topdown neural attention by excitation backprop. arxiv: Zhao, B.; Wu, X.; Feng, J.; Peng, Q.; and Yan, S Diversified visual attention networks for fine-grained object classification. arxiv:
arxiv: v2 [cs.cv] 23 May 2016
![arxiv: v2 [cs.cv] 23 May 2016](/thumbs/88/115196824.jpg "arxiv: v2 [cs.cv] 23 May 2016") Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Weakly Supervised Learning of Part Selection Model with Spatial Constraints for Fine-Grained Image Classification
 Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) Weakly Supervised Learning of Part Selection Model with Spatial Constraints for Fine-Grained Image Classification Xiangteng
Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) Weakly Supervised Learning of Part Selection Model with Spatial Constraints for Fine-Grained Image Classification Xiangteng
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL
 LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Elastic Neural Networks for Classification
 Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Deeply Cascaded Networks
 Deeply Cascaded Networks Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu 1 Introduction After the seminal work of Viola-Jones[15] fast object
Deeply Cascaded Networks Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu 1 Introduction After the seminal work of Viola-Jones[15] fast object
Image Captioning with Object Detection and Localization
 Image Captioning with Object Detection and Localization Zhongliang Yang, Yu-Jin Zhang, Sadaqat ur Rehman, Yongfeng Huang, Department of Electronic Engineering, Tsinghua University, Beijing 100084, China
Image Captioning with Object Detection and Localization Zhongliang Yang, Yu-Jin Zhang, Sadaqat ur Rehman, Yongfeng Huang, Department of Electronic Engineering, Tsinghua University, Beijing 100084, China
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition
 Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
arxiv: v1 [cs.cv] 14 Jul 2017
![arxiv: v1 [cs.cv] 14 Jul 2017](/thumbs/74/70463879.jpg "arxiv: v1 [cs.cv] 14 Jul 2017") Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
FaceNet. Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana
 FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE. Chubu University 1200, Matsumoto-cho, Kasugai, AICHI
 FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition
 Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition Roshanak Zakizadeh, Yu Qian, Michele Sasdelli and Eduard Vazquez Cortexica Vision Systems Limited, London, UK Australian Institute
Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition Roshanak Zakizadeh, Yu Qian, Michele Sasdelli and Eduard Vazquez Cortexica Vision Systems Limited, London, UK Australian Institute
Study of Residual Networks for Image Recognition
 Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/98911750.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Vehicle classification using ResNets, localisation and spatially-weighted pooling Rohan Watkins, Nick Pears, Suresh Manandhar Department of Computer Science, University of York, York, UK arxiv:1810.10329v1
Vehicle classification using ResNets, localisation and spatially-weighted pooling Rohan Watkins, Nick Pears, Suresh Manandhar Department of Computer Science, University of York, York, UK arxiv:1810.10329v1
arxiv: v1 [cs.mm] 12 Jan 2016
![arxiv: v1 [cs.mm] 12 Jan 2016](/thumbs/73/69424856.jpg "arxiv: v1 [cs.mm] 12 Jan 2016") Learning Subclass Representations for Visually-varied Image Classification Xinchao Li, Peng Xu, Yue Shi, Martha Larson, Alan Hanjalic Multimedia Information Retrieval Lab, Delft University of Technology
Learning Subclass Representations for Visually-varied Image Classification Xinchao Li, Peng Xu, Yue Shi, Martha Larson, Alan Hanjalic Multimedia Information Retrieval Lab, Delft University of Technology
DFT-based Transformation Invariant Pooling Layer for Visual Classification
 DFT-based Transformation Invariant Pooling Layer for Visual Classification Jongbin Ryu 1, Ming-Hsuan Yang 2, and Jongwoo Lim 1 1 Hanyang University 2 University of California, Merced Abstract. We propose
DFT-based Transformation Invariant Pooling Layer for Visual Classification Jongbin Ryu 1, Ming-Hsuan Yang 2, and Jongwoo Lim 1 1 Hanyang University 2 University of California, Merced Abstract. We propose
A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance
 JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance Ryo Takahashi, Takashi Matsubara, Member, IEEE, and Kuniaki
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance Ryo Takahashi, Takashi Matsubara, Member, IEEE, and Kuniaki
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL
 PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
Groupout: A Way to Regularize Deep Convolutional Neural Network
 Groupout: A Way to Regularize Deep Convolutional Neural Network Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu Abstract Groupout is a new technique
Groupout: A Way to Regularize Deep Convolutional Neural Network Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu Abstract Groupout is a new technique
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
arxiv: v1 [cs.cv] 18 Apr 2016
![arxiv: v1 [cs.cv] 18 Apr 2016](/thumbs/72/67458129.jpg "arxiv: v1 [cs.cv] 18 Apr 2016") arxiv:1604.04994v1 [cs.cv] 18 Apr 2016 Selective Convolutional Descriptor Aggregation for Fine-Grained Image Retrieval Xiu-Shen Wei, Jian-Hao Luo, and Jianxin Wu National Key Laboratory for Novel Software
arxiv:1604.04994v1 [cs.cv] 18 Apr 2016 Selective Convolutional Descriptor Aggregation for Fine-Grained Image Retrieval Xiu-Shen Wei, Jian-Hao Luo, and Jianxin Wu National Key Laboratory for Novel Software
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Mask-CNN: Localizing parts and selecting descriptors for fine-grained bird species categorization
 Mask-CNN: Localizing parts and selecting descriptors for fine-grained bird species categorization Xiu-Shen Wei a,1, Chen-Wei Xie a,1, Jianxin Wu a,, Chunhua Shen b a National Key Laboratory for Novel Software
Mask-CNN: Localizing parts and selecting descriptors for fine-grained bird species categorization Xiu-Shen Wei a,1, Chen-Wei Xie a,1, Jianxin Wu a,, Chunhua Shen b a National Key Laboratory for Novel Software
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Efficient Convolutional Network Learning using Parametric Log based Dual-Tree Wavelet ScatterNet
 Efficient Convolutional Network Learning using Parametric Log based Dual-Tree Wavelet ScatterNet Amarjot Singh, Nick Kingsbury Signal Processing Group, Department of Engineering, University of Cambridge,
Efficient Convolutional Network Learning using Parametric Log based Dual-Tree Wavelet ScatterNet Amarjot Singh, Nick Kingsbury Signal Processing Group, Department of Engineering, University of Cambridge,
Bilinear Models for Fine-Grained Visual Recognition
 Bilinear Models for Fine-Grained Visual Recognition Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst Fine-grained visual recognition Example: distinguish
Bilinear Models for Fine-Grained Visual Recognition Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst Fine-grained visual recognition Example: distinguish
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
arxiv: v1 [cs.cv] 31 Mar 2017
![arxiv: v1 [cs.cv] 31 Mar 2017](/thumbs/80/81467687.jpg "arxiv: v1 [cs.cv] 31 Mar 2017") End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
Classifying a specific image region using convolutional nets with an ROI mask as input
 Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset
 Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Fine-Grained Visual Categorization using Meta-Learning Optimization with Sample Selection of Auxiliary Data
 Fine-Grained Visual Categorization using Meta-Learning Optimization with Sample Selection of Auxiliary Data Yabin Zhang [0000 0002 2179 3973], Hui Tang [0000 0001 8856 9127], and Kui Jia School of Electronic
Fine-Grained Visual Categorization using Meta-Learning Optimization with Sample Selection of Auxiliary Data Yabin Zhang [0000 0002 2179 3973], Hui Tang [0000 0001 8856 9127], and Kui Jia School of Electronic
Geometry-aware Traffic Flow Analysis by Detection and Tracking
 Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet
 1 Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet Naimish Agarwal, IIIT-Allahabad (irm2013013@iiita.ac.in) Artus Krohn-Grimberghe, University of Paderborn (artus@aisbi.de)
1 Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet Naimish Agarwal, IIIT-Allahabad (irm2013013@iiita.ac.in) Artus Krohn-Grimberghe, University of Paderborn (artus@aisbi.de)
Recurrent Attentional Reinforcement Learning for Multi-label Image Recognition
 Recurrent Attentional Reinforcement Learning for Multi-label Image Recognition Tianshui Chen 1, Zhouxia Wang 1,2, Guanbin Li 1, Liang Lin 1,2 1 School of Data and Computer Science, Sun Yat-sen University,
Recurrent Attentional Reinforcement Learning for Multi-label Image Recognition Tianshui Chen 1, Zhouxia Wang 1,2, Guanbin Li 1, Liang Lin 1,2 1 School of Data and Computer Science, Sun Yat-sen University,
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Boya Peng Department of Computer Science Stanford University boya@stanford.edu Zelun Luo Department of Computer
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Boya Peng Department of Computer Science Stanford University boya@stanford.edu Zelun Luo Department of Computer
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
arxiv: v1 [cs.cv] 26 Jul 2018
![arxiv: v1 [cs.cv] 26 Jul 2018](/thumbs/88/117269915.jpg "arxiv: v1 [cs.cv] 26 Jul 2018") A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
Tiny ImageNet Visual Recognition Challenge
 Tiny ImageNet Visual Recognition Challenge Ya Le Department of Statistics Stanford University yle@stanford.edu Xuan Yang Department of Electrical Engineering Stanford University xuany@stanford.edu Abstract
Tiny ImageNet Visual Recognition Challenge Ya Le Department of Statistics Stanford University yle@stanford.edu Xuan Yang Department of Electrical Engineering Stanford University xuany@stanford.edu Abstract
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
FINE-GRAINED image classification aims to recognize. Fast Fine-grained Image Classification via Weakly Supervised Discriminative Localization
 1 Fast Fine-grained Image Classification via Weakly Supervised Discriminative Localization Xiangteng He, Yuxin Peng and Junjie Zhao arxiv:1710.01168v1 [cs.cv] 30 Sep 2017 Abstract Fine-grained image classification
1 Fast Fine-grained Image Classification via Weakly Supervised Discriminative Localization Xiangteng He, Yuxin Peng and Junjie Zhao arxiv:1710.01168v1 [cs.cv] 30 Sep 2017 Abstract Fine-grained image classification
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations
 Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations Caglar Aytekin, Xingyang Ni, Francesco Cricri and Emre Aksu Nokia Technologies, Tampere, Finland Corresponding
Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations Caglar Aytekin, Xingyang Ni, Francesco Cricri and Emre Aksu Nokia Technologies, Tampere, Finland Corresponding
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Neural Activation Constellations: Unsupervised Part Model Discovery with Convolutional Networks
 Neural Activation Constellations: Unsupervised Part Model Discovery with Convolutional Networks Marcel Simon and Erik Rodner Computer Vision Group, University of Jena, Germany http://www.inf-cv.uni-jena.de/constellation_model_revisited
Neural Activation Constellations: Unsupervised Part Model Discovery with Convolutional Networks Marcel Simon and Erik Rodner Computer Vision Group, University of Jena, Germany http://www.inf-cv.uni-jena.de/constellation_model_revisited
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
COMP9444 Neural Networks and Deep Learning 7. Image Processing. COMP9444 c Alan Blair, 2017
 COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
Data Augmentation for Skin Lesion Analysis
 Data Augmentation for Skin Lesion Analysis Fábio Perez 1, Cristina Vasconcelos 2, Sandra Avila 3, and Eduardo Valle 1 1 RECOD Lab, DCA, FEEC, University of Campinas (Unicamp), Brazil 2 Computer Science
Data Augmentation for Skin Lesion Analysis Fábio Perez 1, Cristina Vasconcelos 2, Sandra Avila 3, and Eduardo Valle 1 1 RECOD Lab, DCA, FEEC, University of Campinas (Unicamp), Brazil 2 Computer Science
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
Improving Face Recognition by Exploring Local Features with Visual Attention
 Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University East Lansing, Michigan, USA shiyichu@msu.edu, jain@cse.msu.edu Abstract
Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University East Lansing, Michigan, USA shiyichu@msu.edu, jain@cse.msu.edu Abstract
Deep Co-occurrence Feature Learning for Visual Object Recognition
 Deep Co-occurrence Feature Learning for Visual Object Recognition Ya-Fang Shih 1,2, Yang-Ming Yeh 1,3, Yen-Yu Lin 1, Ming-Fang Weng 4, Yi-Chang Lu 3, and Yung-Yu Chuang 2 1 Research Center for Information
Deep Co-occurrence Feature Learning for Visual Object Recognition Ya-Fang Shih 1,2, Yang-Ming Yeh 1,3, Yen-Yu Lin 1, Ming-Fang Weng 4, Yi-Chang Lu 3, and Yung-Yu Chuang 2 1 Research Center for Information
Improving Face Recognition by Exploring Local Features with Visual Attention
 Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University Difficulties of Face Recognition Large variations in unconstrained face
Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University Difficulties of Face Recognition Large variations in unconstrained face
End-to-End Localization and Ranking for Relative Attributes
 End-to-End Localization and Ranking for Relative Attributes Krishna Kumar Singh and Yong Jae Lee Presented by Minhao Cheng [Farhadi et al. 2009, Kumar et al. 2009, Lampert et al. 2009, [Slide: Xiao and
End-to-End Localization and Ranking for Relative Attributes Krishna Kumar Singh and Yong Jae Lee Presented by Minhao Cheng [Farhadi et al. 2009, Kumar et al. 2009, Lampert et al. 2009, [Slide: Xiao and
Industrial Technology Research Institute, Hsinchu, Taiwan, R.O.C ǂ
 Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
FUSION NETWORK FOR FACE-BASED AGE ESTIMATION
 FUSION NETWORK FOR FACE-BASED AGE ESTIMATION Haoyi Wang 1 Xingjie Wei 2 Victor Sanchez 1 Chang-Tsun Li 1,3 1 Department of Computer Science, The University of Warwick, Coventry, UK 2 School of Management,
FUSION NETWORK FOR FACE-BASED AGE ESTIMATION Haoyi Wang 1 Xingjie Wei 2 Victor Sanchez 1 Chang-Tsun Li 1,3 1 Department of Computer Science, The University of Warwick, Coventry, UK 2 School of Management,
Progressive Neural Architecture Search
 Progressive Neural Architecture Search Chenxi Liu, Barret Zoph, Maxim Neumann, Jonathon Shlens, Wei Hua, Li-Jia Li, Li Fei-Fei, Alan Yuille, Jonathan Huang, Kevin Murphy 09/10/2018 @ECCV 1 Outline Introduction
Progressive Neural Architecture Search Chenxi Liu, Barret Zoph, Maxim Neumann, Jonathon Shlens, Wei Hua, Li-Jia Li, Li Fei-Fei, Alan Yuille, Jonathan Huang, Kevin Murphy 09/10/2018 @ECCV 1 Outline Introduction
Class 5: Attributes and Semantic Features
 Class 5: Attributes and Semantic Features Rogerio Feris, Feb 21, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Project
Class 5: Attributes and Semantic Features Rogerio Feris, Feb 21, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Project
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks
 BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks Surat Teerapittayanon Harvard University Email: steerapi@seas.harvard.edu Bradley McDanel Harvard University Email: mcdanel@fas.harvard.edu
BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks Surat Teerapittayanon Harvard University Email: steerapi@seas.harvard.edu Bradley McDanel Harvard University Email: mcdanel@fas.harvard.edu
The Treasure beneath Convolutional Layers: Cross-convolutional-layer Pooling for Image Classification
 The Treasure beneath Convolutional Layers: Cross-convolutional-layer Pooling for Image Classification Lingqiao Liu 1, Chunhua Shen 1,2, Anton van den Hengel 1,2 The University of Adelaide, Australia 1
The Treasure beneath Convolutional Layers: Cross-convolutional-layer Pooling for Image Classification Lingqiao Liu 1, Chunhua Shen 1,2, Anton van den Hengel 1,2 The University of Adelaide, Australia 1
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
arxiv: v1 [cs.cv] 4 Dec 2014
![arxiv: v1 [cs.cv] 4 Dec 2014](/thumbs/83/87999872.jpg "arxiv: v1 [cs.cv] 4 Dec 2014") Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Aggregating Frame-level Features for Large-Scale Video Classification
 Aggregating Frame-level Features for Large-Scale Video Classification Shaoxiang Chen 1, Xi Wang 1, Yongyi Tang 2, Xinpeng Chen 3, Zuxuan Wu 1, Yu-Gang Jiang 1 1 Fudan University 2 Sun Yat-Sen University
Aggregating Frame-level Features for Large-Scale Video Classification Shaoxiang Chen 1, Xi Wang 1, Yongyi Tang 2, Xinpeng Chen 3, Zuxuan Wu 1, Yu-Gang Jiang 1 1 Fudan University 2 Sun Yat-Sen University
Learning Deep Representations for Visual Recognition
 Learning Deep Representations for Visual Recognition CVPR 2018 Tutorial Kaiming He Facebook AI Research (FAIR) Deep Learning is Representation Learning Representation Learning: worth a conference name
Learning Deep Representations for Visual Recognition CVPR 2018 Tutorial Kaiming He Facebook AI Research (FAIR) Deep Learning is Representation Learning Representation Learning: worth a conference name
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details