Computer Vision, Lecture 11
|
|
|
- Margery Ashlyn Bridges
- 5 years ago
- Views:
Transcription

1 Computer Vision, Lecture 11 Professor Hager
2 Computational Stereo Much of geometric vision is based on information from (or more) camera locations hard to recover 3D information from D images without extra knowledge motion and stereo are both common in the world Stereo vision is ubiquitous (oddly, nearly 10% of people are stereo blind) Stereo involves the following problems (in reverse order of the way we ll cover them) calibration (already seen) rectification (we ll postpone a bit) matching (correspondence) reconstruction
3 BINOCULAR STEREO SYSTEM: GEOMETRY GOAL: Passive -camera system for triangulating 3D position of points in space to generate a depth map of a world scene. Example of a depth-map: z=f(x,y) where x,y coordinatizes one of the image planes and z is the height above the respective image plane. Note that for stereo systems which differ only by an offset in x, the v coordinates (projection of y) is the same in both images! LEFT IMAGE PLANE LEFT FOCAL POINT BASELINE d FOCAL LENGTH f RIGHT FOCAL POINT (D topdown view) RIGHT IMAGE PLANE
4 BINOCULAR STEREO SYSTEM DISPARITY (XL - XR) Z Z = (f/xl) X Z= (f/xr) (X-d) (f/xl) X = (f/xr) (X-d) X = (XR d) / (XL - XR) Z=f XL XR Z = df (XL - XR) (0,0) (d,0) X
5 Computing the Disparity Range The first step in correspondence search is to compute the range of disparities to search The horopter is the set of distances which have disparity zero (or very close to zero) for a verged system. Human stereo only takes place within the horopter. We assume a non-verged system. Therefore, we have d = f b/z given a range z min to z max, we calculate d min = f b / z max d max = f b/ z min Thus, for each point u l in the left image, we will search points u l + d min to u l + d max in the right. Note we can turn this around and start at a point u r and search from u r - d max to u r - d min
6 MATCHING AND CORRESPONDENCE Two major approaches feature-based region based In feature-based matching, the idea is to pick a feature type (e.g. edges), define a matching criteria (e.g. orientation and contrast sign), and then look for matches within a disparity range
7 MATCHING AND CORRESPONDENCE Two major approaches feature-based region based In region-based matching, the idea is to pick a region in the image and attempt to find the matching region in the second image by maximizing the some measure: 1. normalized SSD. SAD 3. normalized cross-correlation
8 MATCHING AND CORRESPONDENCE Feature-based vs. region-based feature-based leads to sparse disparity maps interpolation to fill in gaps scale-space approaches to fill in gaps region-based matching only works where there is texture compute a confidence measure for regions apply continuity or match ordering constraints region matching can be sensitive to changes in surface orientation feature-based can be sensitive to feature drop-outs
9 Region-Based Matching Metrics An obvious solution: minimize the sum of squares think of R and R as a region and a candidate region in vector form SSD = R R = R R. R + R ^ Note that we can change the SSD by making the image brighter or dimmer, or changing contrast As a result, it is common to subtract the mean of both images (removes brightness) normalize by variance (removes contrast) Note taking two derivatives (e.g. a Laplacian) has roughly the same effect! In this case, minimizing SSD is equivalent to maximizing R. R this is the normalized cross correlation! Both SSD and NCC are sensitive to outliers SAD = 1. R R is less sensitive to outliers and thus more robust it is also easier to compute.
10 Match Metric Summary MATCH METRIC DEFINITION Normalized Cross-Correlation (NCC) u, v u, v ( I ( u, v) I ) I ( u + d, v) ( I ) ( I ( u, v) I ) I ( u + d, v) ( I ) Sum of Squared Differences (SSD) ( I ( u, v) I ( u d v) ) + u, v 1, Normalized SSD Sum of Absolute Differences (SAD) u, v ( I1( u, v) I1 ) I ( u, v) I ( 1 1 ) u, v ( I ( u + d, v) I ) I ( u + d, v) I ( ) u, v ( u, v) I ( u d v) I + u, v 1, Rank Census I I ' ' ( I ( u, v) I ( u d v) ) + u, v ' k 1, ( u, v) = I ( m, n) < I ( u, v) m, n k ' ' ( I ( u, v), I ( u d v) ) HAMMING + u, v 1, ( u v) = BITSTRING ( I ( m, n) < I ( u v) ) ' k, m, n k k, k
11 Correspondence Search Algorithm (simple version for CC) For i = 1:nrows for j=1:ncols best(i,j) = 0 disparities(i,j) = -1 end end for k = mindisparity:maxdisparity c = CC(I1(i,j),I(i,j+k),winsize) if (c > best(i,j)) best(i,j) = c disparities(i,j) = k end end O(nrows * ncols * disparities * winx * winy) v u d I 1 I
12 Correspondence Search Algorithm (efficient version for CC) best = -ones(size(im)) disp = zeros(size(im)) for k = mindisparity:maxdisparity prod = I1(:,overlap).* I(:,k+overlap) CC = box(prod,winsize) better = CC > best; disp = better.* k + (1-better).*disp; end O(disparities * nrows * ncols)


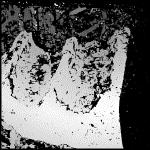
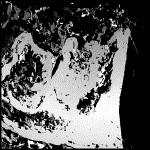



13 Example Disparity Maps SSD ZNNC
14 Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search Arbitrary images of the same scene may be rectified based on Monotonic Ordering epipolar geometry such that stereo matches lie along onedimensional scanlines. This reduces the computational complexity and also reduces the likelihood of false matches. Points along an epipolar scanline appear in the same order in both stereo images, assuming that all objects in the scene are approximately the same distance from the cameras. Image Brightness Constancy Match Uniqueness Disparity Continuity Disparity Limit Fronto-Parallel Surfaces Feature Similarity Structural Grouping Assuming Lambertian surfaces, the brightness of corresponding points in stereo images are the same. For every point in one stereo image, there is at most one corresponding point in the other image. Disparities vary smoothly (i.e. disparity gradient is small) over most of the image. This assumption is violated at object boundaries. The search space may be reduced significantly by limiting the disparity range, reducing both computational complexity and the likelihood of false matches. The implicit assumption made by area-based matching is that objects have fronto-parallel surfaces (i.e. depth is constant within the region of local support). This assumption is violated by sloping and creased surfaces. Corresponding features must be similar (e.g. edges must have roughly the same length and orientation). Corresponding feature groupings and their connectivity must be consistent.
15 MATLAB DEMO IN CLASS MATLAB DEMO OF ZNNC matching
16 BINOCULAR STEREO SYSTEM (D VIEW It is not hard to show that when we rotate the cameras inward, corresponding points no longer lie on a scan line Nonverged Stereo System Verged Stereo System
17 More Generally If we think about it, something is fishy: a point has 3 coordinates two camera observations have four coordinates therefore: if we choose a point in one image ( coords), then there is only one degree of freedom left There is in fact a geometric constraint that we can exploit to improve the performance of stereo (and in fact do even more)
18 EPIPOLAR GEOMETRY For an image point C in the left image plane consider the plane determined by the left image focal point A the right image focal point B and the point C. Call this the epipolar plane for image point C with respect to a particular binocular stereo configuration. C A B
19 EPIPOLAR GEOMETRY In order to guarantee intersection of projective rays produced from the left and right image planes, the point in the right image plane corresponding to C must lie on the intersection of the epipolar plane with the right image plane. C A B EPIPOLAR PLANE EPIPOLAR LINE
20 THE EPIPOLAR CONSTRAINT line along which the physical point must lie (projection line) X x x an observed point the image of the projection line
21 EPIPOLAR GEOMETRY ( SCANLINE COHERENT STEREO SYSTEM)
22 EPIPOLAR GEOMETRY (VERGED IN)
23 EPIPOLAR GEOMETRY: DERIVATION (P l T) (T x P l )= 0 P rt R (T x P l ) = 0 P rt E P l = 0 P r P l where E = R sk(t) T P r = R(P l T) 0 -T z T y sk(t) = T z 0 -T x -T T y x 0 The matrix E is called the essential matrix and completely describes the epipolar geometry of the stereo pair
24 EPIPOLAR GEOMETRY: DERIVATION Note that E is invariant to the scale of the points, therefore we also have p rt E p l = 0 where p denotes the (metric) image projection of P P P l r T P r = R(P l T) Now if H denotes the internal calibration, converting from metric to pixel coordinates, we have further that r rt H -t E H -1 r l = r rt F r l = 0 where r denotes the pixel coordinates of p. F is called the fundamental matrix
25 EPIPOLAR GEOMETRY: COMPUTATION p rt E p l = 0 or r rt Fr l = 0 Note that, given a correspondence, we can form a linear constraint on E (or F). Both E and F are only unique up to scale, therefore we need 9-1 = 8 matches, then we can form a system of the form C e = 0 where e is the vector of 9 values in E Using SVD, we can write C = U D V t E (or F) is the column of V corresponding to the least singular value of C. E (or F) is supposed to be rank deficient; to enforce this, we can compute the SVD of E (or F), set the smallest singular value to 0, then multiply the components to get the corrected F WHY?
26 EPIPOLAR GEOMETRY: STEREO CORRESPONCE p rt E p l = 0 or r rt Fr l = 0 One of the important uses of epipolar geometry is that it greatly reduces the complexity of stereo. Given a match in the left image, the appropriate place to look for a match in the right is along the corresponding epipolar line. Alternatively, it is possible to use epipolar structure to warp the image to have parallel epipolar geometry, making stereo search a trivial scan-line search.
27 EPIPOLAR GEOMETRY: RECONSTRUCTION p rt E p l = 0 or r rt Fr l = 0 One additional useful fact is that we can use epipolar geometry for stereo calibration of a sort. First, note that E t E involves only translation and that tr(e t E) = T So, if we normalize by sqrt(tr(e t E)/), we compute and new matrix E which has unit norm translation T up to sign. We can solve for T from E (or T from E for that matter) Now define w i = E i x T and R i = w i + w j x w k The three values of R i for all combinations of 1,,3 are the rows of the rotation matrix.
28 How to Change Epipolar Geometry Image rectification is the computation of an image as seen by a rotated camera we ll show later that depth doesn t matter when rotating; for now we ll just use intuition Original image plane New image plane
29 Using E to get Nonverged Stereo From E we get R and T such that l p = l R r r p + l Tk Note that T is really the direction we d like the camera baseline to point in (note we don t care about its norm) Let R x = T Let R y = (0,0,1) x T / T x (0,0,1) Let R z = R x x R y Now, R = [R x,r y,r z ] takes point from the left camera to a nonverged camera system, so we have newl R= R, newr R= R l R r (note the book uses the transpose of this, i.e. the rotation of the frame rather than the points)
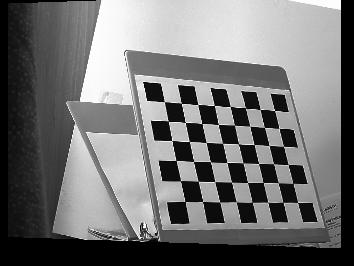
30 Rectification: Basic Algorithm 1. Create a mesh of pixel coordinates for the rectified image. Turn the mesh into a list of homogeneous points 3. Project *backwards* through the intrinsic parameters to get unit focal length values 4. Rotate these values back to the current camera coordinate system. 5. Project them *forward* through the intrinsic parameters to get pixel coordinates again. 6. Sample at these points to populate the rectified image.

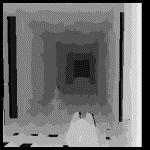
31 Rectification Results. rad.4 rad.6 rad
32 EPIPOLAR GEOMETRY: RECONSTRUCTION p rt E p l = 0 or r rt Fr l = 0 Putting all this together, we get the following algorithm: 1. Find 8 or more correspondences and compute E (note we need internal parameters to do this).. Given E, compute T and R. 3. Rectify the image using T and R. 4. Now, do standard nonverged stereo. 5. Check the sign of the depth in the left and right images; if not both positive, adjust signs in E or T (see book pg. 166). Result: We can reconstruct up to scale using only camera images, provided we know internal parameters
33 THE FUNDAMENTAL MATRIX AND RECONSTRUCTION p rt E p l = 0 or r rt Fr l = 0 If we do not know the internal parameters, then the 8 point algorithm can only be used to compute F. Unfortunately, F has less structure; what we can show is that we can only reconstruct up to a projective transformation.
34 SUMMARY: SIMPLE STEREO Given two cameras with known relative positions in space and known internal parameters: 1. Rectify the two images using epipolar geometry.. Compute image correspondences using either feature-based or correlation-based matching 3. Convert resulting pixel coordinates to metric coordinates using internal calibration 4. Use triangulation equation to compute distance 1. If unknown baseline, simply invert disparity (reconstruction up to a scale factor) 5. Post-process 1. remove outliers (e.g. median filter). interpolate surface
35 MATCHING AND CORRESPONDENCE There is no Best solution for correspondence new frame-rate stereo systems use cross-correlation with left-right and right-left validation There has been recent work on computing a globally optimal disparity map taking into account occlusion C 0 and C 1 discontinuities ordering constraints based on continuous surfaces
36 Real-Time Stereo REAL-TIME IMAGE SIZE FRAME RATE RANGE BINS METHOD PROCESSOR CAMERAS STEREO SYSTEM INRIA x fps 3 Normalized PeRLe-1 3 Correlation CMU iwarp x40 15 fps 16 SSAD 64 Processor 3 iwarp Computer Teleos x fps 3 Sign Pentium 166 MHz Correlation JPL x fps 3 SSD Datacube & CMU Stereo Machine x40 30 fps 30 SSAD Custom HW & C40 DSP Array Point Grey Triclops 30x40 6 fps 3 SAD Pentium II MHz SRI SVS x40 1 fps 3 SAD Pentium II 33 MHz SRI SVM II x fps 3 SAD TMS30C60x 00MHz DSP Interval PARTS 30x40 4 fps 4 Census Custom FPGA Engine 1997 Matching CSIRO x56 30 fps 3 Census Custom FPGA Matching SAZAN x40 0 fps 5 SSAD FPGA & 9 Convolvers Point Grey Triclops x40 0 fps 13 fps 3 SAD Pentium IV 1.4 GHz 3 SRI SVS x40 30 fps 3 SAD Pentium III 700 MHZ
37 SOME OTHER MAJOR PROBLEMS WITH CORRESPONDENCE (D VIEW) OCCLUSION LIMITED FIELD OF VIEW
38 Methods for Occlusion APPROACH RELEVANT PAPERS BRIEF DESCRIPTION METHODS THAT DETECT OCCLUSION Depth Map Discontinuities Discontinuities in the depth map are assumed to be occlusion regions. Left-Right Matching [15], [9] Matches that are not unique when estimated from left-to-right and right-to-left are assumed to be in occlusion regions. Ordering Constraint [50], [74], [88] Oppositely ordered adjacent matches indicate occlusion. Intensity Edges [11], [17], [60] Intensity edges are assumed to correspond to occlusion boundaries. METHODS THAT REDUCE SENSITIVITY TO OCCLUSION Robust Similarity Criterion [7], [66], [70], [74], [89] Robust methods are employed in the match metric to reduce sensitivity to occlusion. Adaptive Regions of Support [31], [39], [5], [68], [71], [90] Regions of support are adaptively resized, reshaped or diffused to obtain the best match and minimize the effects of occlusion. METHODS THAT MODEL OCCLUSION GEOMETRY Global Occlusion Modeling [5], [10], [36], [65] Occlusion is modeled and included in the match procedure, usually using dynamic programming. Multiple Cameras [58], [67] Multiple cameras ensure that every point in the scene is visible by at least two cameras. Active Vision [16], [49], [61], [64] The camera or stereo rig is moved in order to detect occlusion and to determine occlusion width.
39 Local vs. Global Matching Comparative results on images from the University of Tsukuba, provided by Scharstein and Szeliski [69]. Left to right: left stereo image, ground truth, Muhlmann et al. s area correlation algorithm [57], dynamic programming (similar to Intille and Bobick [36]), Roy and Cox s maximum flow [65] and Komolgorov and Zabih s graph cuts [45].
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Computer Vision I. Announcement
 Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Announcements. Stereo Vision II. Midterm. Example: Helmholtz Stereo Depth + Normals + BRDF. Stereo
 Announcements Stereo Vision II Introduction to Computer Vision CSE 15 Lecture 13 Assignment 3: Due today. Extended to 5:00PM, sharp. Turn in hardcopy to my office 3101 AP&M No Discussion section this week.
Announcements Stereo Vision II Introduction to Computer Vision CSE 15 Lecture 13 Assignment 3: Due today. Extended to 5:00PM, sharp. Turn in hardcopy to my office 3101 AP&M No Discussion section this week.
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Stereo (Part 2) Introduction to Computer Vision CSE 152 Lecture 9
 Introduction to Computer Vision CSE 152 Lecture 9") Stereo (Part 2) CSE 152 Lectre 9 Annoncements Homework 3 is de May 9 11:59 PM Reading: Chapter 7: Stereopsis Stereo Vision Otline Offline: Calibrate cameras & determine B epipolar geometry Online C D A
Stereo (Part 2) CSE 152 Lectre 9 Annoncements Homework 3 is de May 9 11:59 PM Reading: Chapter 7: Stereopsis Stereo Vision Otline Offline: Calibrate cameras & determine B epipolar geometry Online C D A
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Robert Collins CSE486, Penn State. Lecture 09: Stereo Algorithms
 Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)
Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Transformations Between Two Images. Translation Rotation Rigid Similarity (scaled rotation) Affine Projective Pseudo Perspective Bi linear
 Affine Projective Pseudo Perspective Bi linear") Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Fundamental Matrix. Lecture 13
 Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
Maximum-Likelihood Stereo Correspondence using Field Programmable Gate Arrays
 Maximum-Likelihood Stereo Correspondence using Field Programmable Gate Arrays Siraj Sabihuddin & W. James MacLean Department of Electrical and Computer Engineering, University of Toronto, Toronto, Ontario,
Maximum-Likelihood Stereo Correspondence using Field Programmable Gate Arrays Siraj Sabihuddin & W. James MacLean Department of Electrical and Computer Engineering, University of Toronto, Toronto, Ontario,
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Introduction to Computer Vision. Week 10, Winter 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix