Boresight alignment method for mobile laser scanning systems
|
|
|
- Jonathan McKinney
- 5 years ago
- Views:
Transcription
1 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria
2 Contents A new principle of boresight alignment for mobile Laser scanning systems RIEGL s new V-line of 2D and 3D laser scanners Experiments and sample data Conclusion Contents

3 Typical configuration of a MLS system comprising a 3D-laser scanner and a IMU/GPS sub-system A new principle of boresight alignment
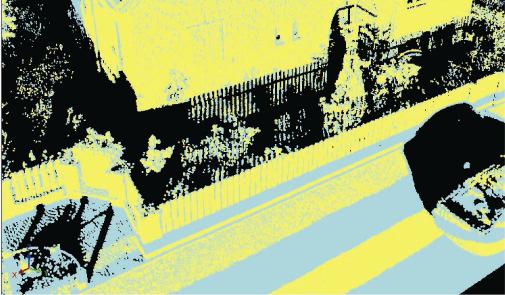
4 Mobile scanning of facades from different driving- and scanning directions. A new principle of boresight alignment
5 A new principle of boresight alignment - scan data adjustment Appearance of boresight angles, e.g. the roll axis, in the three dimensional point cloud Planar surfaces detected inside the point cloud are represented by their location and their normal vector. n d d n P P d n P P d n i = + = = = ) ( ) ( σ r r r r r r r r Mean square residual error distance of all corresponding planar surfaces. Corresponding planar surfaces




 500 m (80%) RIEGL s new")
6 V-Line of 2D- and 3D laser scanners Airborne Scanning Mobile Scanning Terrestrial Scanning RIEGL VQ-480 RIEGL VQ-180 RIEGL VQ-250 RIEGL VZ-400 Scan Range: 60 deg 100 deg 360 deg 100 x 360 deg Laser Clock: 200 khz 200 khz 200 khz 100/300 khz Max. Range: 600 m (60%) 500 m (20%) 300 m (80%) 500 m (80%) RIEGL s new V-line of 2D and 3D laser scanners


7 measurement range up to 500 m laser class 1, invisible laser beam repeatability and accuracy better 5 mm effective measurement rate up to meas./sec field of view 100 deg x 360 deg RIEGL VZ-400 Specification RIEGL s new V-line of 2D and 3D laser scanners
8 RIEGL s new V-line of 2D and 3D laser scanners - Echo Digitization



9 σ = 4 mm 7200 pts σ = 5 mm pts σ=2.6 mm 5600 pts Single Target First Target Last Target Other Targets RIEGL s new V-line of 2D and 3D laser scanners - precision and accuracy




10 Experimental mobile laser scanning system mounted on a car Experiments and sample data
11 average measurement distance average point 30m speed of the car angular resolution of two subsequent laser measurements within one line scan scanning rate approx. 30 m 5 cm approx. 20 km/h 0.1 deg 120 line scans per second Used parameters for the surveying drive Experiments and sample data
12 RiPROCESS, RIEGL s software solution for processing the mobile scan data, covers four major tasks: Organize, process, and archive all data related to a single project. Visualize data on different scales, i.e., on a large scale as rasterized data, on a small scale as point clouds in 3D Calibrate the system and/or adjust the scan data to minimize inconsistencies in the laser data, also addressed as strip adjustment. Export data in widely supported formats for further processing Experiments and sample data



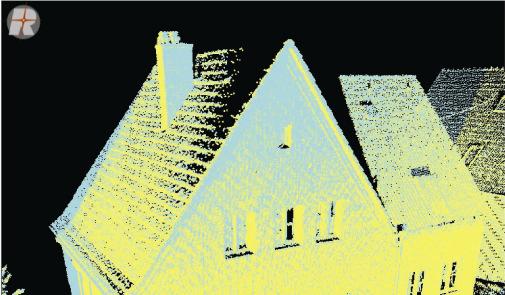
13 Orthogonal view of the common point cloud of 6 different scans SOCS C IMU = Transformation matrix Perspective view of one single house The arrows indicate the directions and colors of the 6 different scans Experiments and sample data

 and to right")

")
 the car")


14 Point cloud of the scan to left backwards (120 deg) and to right forwards (300 deg) with respect to the car Point cloud of the scan to the left (90 deg) and to the right (270 deg) with respect to the car Point cloud of the scan to left forwards (60 deg) and to right backwards (240 deg) with respect to the car Experiments and sample data
15 Calculation mode: Calculation time: Min. change of error [m]: Search active: Search radius [m]: Angle tolerance [deg]: Max. normal dist. [m]: Quadtree cells - active: Quadtree cells - count: Calculation results Adjustment (least square fitting) 8 secs, 79 msecs True True 629 Number of observations: 471 Error (Std. deviation) [m]: Name Roll Pitch Yaw VZ-400 (VZ400, ) RiPROCESS Scan Data Adjustment Protocol Experiments and sample data Scan data adjustment - Protocol


16 Histogram of residues Orientation chart Experiments and sample data








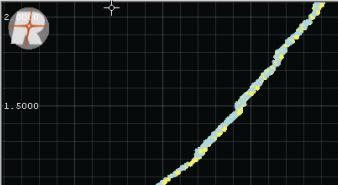
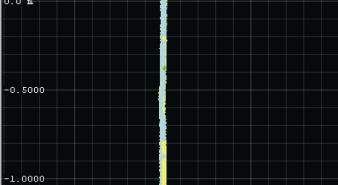
17 Composite pointcloud cross section of the house before & after the boresight alignment Experiments and sample data





18 Detail of the left facade before & after the boresight alignment Experiments and sample data
19 Conclusion 3D scanner in MLS is a new technique, data suitable for determination of boresight alignment High pulse rate & real-time waveform technique provides high point densities covering surfaces even hidden behind vegetation Common planar surfaces are input to the subsequent scan data adjustment algorithm which enables a robust estimation of the systems boresight angles The accuracy of the estimated boresight calibration values depends strongly on the quality of the position and attitude data MLS key components: IMU/GPS system of high long term measurement accuracy & fast and accurate 3D laser scanner Advantage of the proposed method: the possibility of determining the boresight angles by analyzing (user) scan data acquired in any desired area providing at least some common planar surfaces Conclusion
20 Thank you! Conclusion
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR
 Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
LAS extrabytes implementation in RIEGL software WHITEPAPER
 in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
Innovation in 3D. Product Overview
 Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
RIEGL VMX-250. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
RIEGL VMX-450. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
RIEGL VZ-400i. Digital Information in 3D Innovations and Best Practises. 4th to 5th of November, Prince Philip House, London
 RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
Laser scanners with echo digitization for full waveform analysis
 Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
NEW RIEGL. Triple Scanner Mobile Mapping System Specifically Designed for Rail Application. Typical Applications
 NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
VMX -2HA RIEGL. High Speed, High Performance Dual Scanner Mobile Mapping System. Typical Applications
 RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS
 ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying. IR laser scanner channel OCTOBER 2015
 RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
VZ series Camera Calibration
 VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
Geosmart Asia Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency. Thomas Gaisecker. April, 2018
 Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios
 Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
An Education Tool. Airborne Altimetric LiDAR Simulator:
 Airborne Altimetric LiDAR Simulator: An Education Tool Bharat Lohani, PhD R K Mishra, Parameshwar Reddy, Rajneesh Singh, Nishant Agrawal and Nitish Agrawal Department of Civil Engineering IIT Kanpur Kanpur
Airborne Altimetric LiDAR Simulator: An Education Tool Bharat Lohani, PhD R K Mishra, Parameshwar Reddy, Rajneesh Singh, Nishant Agrawal and Nitish Agrawal Department of Civil Engineering IIT Kanpur Kanpur
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application
 Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z420i
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer
 Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy
 Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY
 AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM
 HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM ANDREAS ULLRICH Technical Director RIEGL Laser Measurement Systems GmbH Horn, Austria www.riegl.co.at
HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM ANDREAS ULLRICH Technical Director RIEGL Laser Measurement Systems GmbH Horn, Austria www.riegl.co.at
Industrial 2D LASER SCANNER LMS-Q120ii
 LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
Case studies about using Mobile Mapping System (MMS) on traffic network mapping
 on traffic network mapping") HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
Chapter 1: Overview. Photogrammetry: Introduction & Applications Photogrammetric tools:
 Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Airborne LiDAR Data Acquisition for Forestry Applications. Mischa Hey WSI (Corvallis, OR)
") Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Iwane Mobile Mapping System
 Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems
 Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
ICC experiences on Inertial / GPS sensor orientation. A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC
 ICC experiences on Inertial / GPS sensor orientation A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC Keywords: GPS/INS orientation, robustness Abstract In the last few years the photogrammetric
ICC experiences on Inertial / GPS sensor orientation A. Baron, W.Kornus, J.Talaya Institut Cartogràfic de Catalunya, ICC Keywords: GPS/INS orientation, robustness Abstract In the last few years the photogrammetric
POINT CLOUD ANALYSIS FOR ROAD PAVEMENTS IN BAD CONDITIONS INTRODUCTION
 POINT CLOUD ANALYSIS FOR ROAD PAVEMENTS IN BAD CONDITIONS Yoshiyuki Yamamoto, Associate Professor Yasuhiro Shimizu, Doctoral Student Eiji Nakamura, Professor Masayuki Okugawa, Associate Professor Aichi
POINT CLOUD ANALYSIS FOR ROAD PAVEMENTS IN BAD CONDITIONS Yoshiyuki Yamamoto, Associate Professor Yasuhiro Shimizu, Doctoral Student Eiji Nakamura, Professor Masayuki Okugawa, Associate Professor Aichi
ADS40 Calibration & Verification Process. Udo Tempelmann*, Ludger Hinsken**, Utz Recke*
 ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
CALIBRATION PROCEDURES OF THE IMAGING LASER ALTIMETER AND DATA PROCESSING
 CALIBRATION PROCEDURES OF THE IMAGING LASER ALTIMETER AND DATA PROCESSING Karl-Heinz Thiel, Aloysius Wehr Institut für Navigation, Universität Stuttgart Geschwister-Scholl-Str. 24D D-70174 Stuttgart KEYWORDS:
CALIBRATION PROCEDURES OF THE IMAGING LASER ALTIMETER AND DATA PROCESSING Karl-Heinz Thiel, Aloysius Wehr Institut für Navigation, Universität Stuttgart Geschwister-Scholl-Str. 24D D-70174 Stuttgart KEYWORDS:
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
ACCURACY OF MEASUREMENTS MADE WITH A CYRAX 2500 LASER SCANNER AGAINST SURFACES OF KNOWN COLOUR
 ACCURACY OF MEASUREMENTS MADE WITH A CYRAX 5 LASER SCANNER AGAINST SURFACES OF KNOWN COLOUR J. Clark and S. Robson (jclark@ge.ucl.ac.uk, srobson@ge.ucl.ac.uk) Department of Geomatic Engineering, University
ACCURACY OF MEASUREMENTS MADE WITH A CYRAX 5 LASER SCANNER AGAINST SURFACES OF KNOWN COLOUR J. Clark and S. Robson (jclark@ge.ucl.ac.uk, srobson@ge.ucl.ac.uk) Department of Geomatic Engineering, University
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning
 ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
CRONOS 3D DIMENSIONAL CERTIFICATION
 CRONOS 3D DIMENSIONAL CERTIFICATION This dimensional certification is structured as follow: 1. 2. 3. 4. 5. Test description Dimensional report basic workflow Dimensional report, acquisition field 18mm
CRONOS 3D DIMENSIONAL CERTIFICATION This dimensional certification is structured as follow: 1. 2. 3. 4. 5. Test description Dimensional report basic workflow Dimensional report, acquisition field 18mm
Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS)
") Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS) Philipp AMON, Ursula RIEGL, Peter RIEGER and Martin PFENNIGBAUER, Austria Key words: UAS, laser scanning,
Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS) Philipp AMON, Ursula RIEGL, Peter RIEGER and Martin PFENNIGBAUER, Austria Key words: UAS, laser scanning,
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Aalborg Universitet. Published in: Accuracy Publication date: Document Version Early version, also known as pre-print
 Aalborg Universitet A method for checking the planimetric accuracy of Digital Elevation Models derived by Airborne Laser Scanning Høhle, Joachim; Øster Pedersen, Christian Published in: Accuracy 2010 Publication
Aalborg Universitet A method for checking the planimetric accuracy of Digital Elevation Models derived by Airborne Laser Scanning Høhle, Joachim; Øster Pedersen, Christian Published in: Accuracy 2010 Publication
Lecture 11. LiDAR, RADAR
 NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
Advanced Processing Techniques and Classification of Full-waveform Airborne Laser...
 f j y = f( x) = f ( x) n j= 1 j Advanced Processing Techniques and Classification of Full-waveform Airborne Laser... 89 A summary of the proposed methods is presented below: Stilla et al. propose a method
f j y = f( x) = f ( x) n j= 1 j Advanced Processing Techniques and Classification of Full-waveform Airborne Laser... 89 A summary of the proposed methods is presented below: Stilla et al. propose a method
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF
 The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING
 DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING Tsutomu Kakiuchi a *, Hirofumi Chikatsu b, Haruo Sato c a Aero Asahi Corporation, Development Management Division,
DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING Tsutomu Kakiuchi a *, Hirofumi Chikatsu b, Haruo Sato c a Aero Asahi Corporation, Development Management Division,
COMPARISON OF AIRBORNE LASER SCANNING OF LOW AND HIGH ABOVE GROUND LEVEL FOR SELECTED INFRASTRUCTURE OBJECTS
 COMPARISON OF AIRBORNE LASER SCANNING OF LOW AND HIGH ABOVE GROUND LEVEL FOR SELECTED INFRASTRUCTURE OBJECTS J. Siwiec a a AGH University of Science and Technology, Faculty of Mining Surveying and Environmental
COMPARISON OF AIRBORNE LASER SCANNING OF LOW AND HIGH ABOVE GROUND LEVEL FOR SELECTED INFRASTRUCTURE OBJECTS J. Siwiec a a AGH University of Science and Technology, Faculty of Mining Surveying and Environmental
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Introduction. Acute3D S.A.S. WTC Valbonne Sophia Antipolis. 120 route des Macarons.
 Introduction This benchmark compares the performances of the three main photo-based 3Dmodeling software. Five projects related to different kind of applications were led on the same machine and this document
Introduction This benchmark compares the performances of the three main photo-based 3Dmodeling software. Five projects related to different kind of applications were led on the same machine and this document
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Improved bore-sight calibration for airborne light detection and ranging using planar patches
 Improved bore-sight calibration for airborne light detection and ranging using planar patches Dong Li Huadong Guo Cheng Wang Pinliang Dong Zhengli Zuo Dong Li, Huadong Guo, Cheng Wang, Pinliang Dong, Zhengli
Improved bore-sight calibration for airborne light detection and ranging using planar patches Dong Li Huadong Guo Cheng Wang Pinliang Dong Zhengli Zuo Dong Li, Huadong Guo, Cheng Wang, Pinliang Dong, Zhengli
The YellowScan Surveyor: 5cm Accuracy Demonstrated
 The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
Watershed Sciences 4930 & 6920 ADVANCED GIS
 Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Airborne LIDAR borsight error calibration based on surface coincide
 IOP Conference Series: Earth and Environmental Science OPEN ACCESS Airborne LIDAR borsight error calibration based on surface coincide To cite this article: Fangyan Yuan et al 2014 IOP Conf. Ser.: Earth
IOP Conference Series: Earth and Environmental Science OPEN ACCESS Airborne LIDAR borsight error calibration based on surface coincide To cite this article: Fangyan Yuan et al 2014 IOP Conf. Ser.: Earth
Phone: Fax: Table of Contents
 Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
Geomorphic Characterization of Precarious Rock Zones LIDAR Mapping Project Report Principal Investigator: David E. Haddad Arizona State University ASU School of Earth and Space
THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D
 THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D K. S. Qtaishat, M. J. Smith, D. W. G. Park Civil and Environment Engineering Department, Mu ta, University, Mu ta, Karak, Jordan, 61710 khaldoun_q@hotamil.com
THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D K. S. Qtaishat, M. J. Smith, D. W. G. Park Civil and Environment Engineering Department, Mu ta, University, Mu ta, Karak, Jordan, 61710 khaldoun_q@hotamil.com
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller
 Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller School of Civil Engineering & Geosciences Newcastle University Overview Laser scanning overview Research applications geometric
Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller School of Civil Engineering & Geosciences Newcastle University Overview Laser scanning overview Research applications geometric
UAV BASED LIDAR ACQUISITION FOR THE DERIVATION OF HIGH-RESOLUTION FOREST AND GROUND INFORMATION
 UAV BASED LIDAR ACQUISITION FOR THE DERIVATION OF HIGH-RESOLUTION FOREST AND GROUND INFORMATION Felix Morsdorf a, Christoph Eck b, Carlo Zgraggen b, Benedikt Imbach b, Fabian D. Schneider a, Daniel Kükenbrink
UAV BASED LIDAR ACQUISITION FOR THE DERIVATION OF HIGH-RESOLUTION FOREST AND GROUND INFORMATION Felix Morsdorf a, Christoph Eck b, Carlo Zgraggen b, Benedikt Imbach b, Fabian D. Schneider a, Daniel Kükenbrink
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER
 SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
SHALLOW SOUNDING BATHYMETRIC USING MULTIBEAM ECHOSOUNDER AND TOPOGRAPHIC LASER SCANNER BY : NURSUGI, TRI PATMASARI & KHAFID GEOSPASIAL INFORMATION AGENCY AMSTERDAM, 11-14 NOVEMBER 2014 Indonesia coastline
The process components and related data characteristics addressed in this document are:
 Tech Notes Certainty 3D February 7, 2017 To: General Release From: Ted Knaak Certainty 3D, LLC Re: Structural Wall Monitoring (#1017) rev: C Introduction TopoDOT offers several tools designed specifically
Tech Notes Certainty 3D February 7, 2017 To: General Release From: Ted Knaak Certainty 3D, LLC Re: Structural Wall Monitoring (#1017) rev: C Introduction TopoDOT offers several tools designed specifically
High Precision Lens Mounting
 High Precision Lens Mounting APOMA Tucson Tech Workshop, 10-11 November, 2016 Presentation by Frédéric Lamontagne Institut national d optique (INO) Québec City, Canada 2016 Outline 1. Review of common
High Precision Lens Mounting APOMA Tucson Tech Workshop, 10-11 November, 2016 Presentation by Frédéric Lamontagne Institut national d optique (INO) Québec City, Canada 2016 Outline 1. Review of common
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain
 Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
WELCOME. A High-Tech Company introducing itself. to a short presentation of RIEGL Laser Measurement Systems GmbH
 WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
ifp Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report
 Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report