Lecture 7: Most Common Edge Detectors
|
|
|
- Ashley Curtis
- 5 years ago
- Views:
Transcription
1 #1 Lecture 7: Most Common Edge Detectors Saad Bedros
2 Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist s line drawing (but artist is also using object-level knowledge) Source: D. Lowe
3 Gradient Visualization #3
4 Designing an edge detector Criteria for a good edge detector: Good detection: the optimal detector should find all real edges, ignoring noise or other artifacts Good localization the edges detected must be as close as possible to the true edges the detector must return one point only for each true edge point Cues of edge detection Differences in color, intensity, or texture across the boundary Continuity and closure High-level knowledge Source: L. Fei-Fei


5 Edge Detection Using Derivative Image first and second derivatives are a good first level Edge Detectors: Convolution #5 Image I I x = I *[ 1 1]


6 Edge Detection Using Derivative Image derivatives: #6 I x = I *[ 1 1] Image I I y = 1 I * 1
7 Derivatives and Noise Derivatives are strongly affected by noise obvious reason: image noise results in pixels that look very different from their neighbors The larger the noise - the stronger the response What is to be done? Neighboring pixels look alike Pixel along an edge look alike Image smoothing should help Force pixels different to their neighbors (possibly noise) to look like neighbors #7

8 Derivatives and Noise #8 Increasing noise Need to perform image smoothing as a preliminary step Generally use Gaussian smoothing
9 Edge Detection & Image Noise I ( x) = Iˆ( x) + N( x) N( x) ~ N(0, σ ) i.i.d #9 Taking differences: I'( x) Iˆ( x + 1) + N( x = ( Iˆ( x + 1) Iˆ( x 1)) Iˆ'( x) + 1) - ( Iˆ( x N d 1) + N( x + ( N( x + 1) - N( x 1)) ( x) 1)) = Output noise: E( N d ( x)) = 0 ( E N d ( x)) = E( N ( x + 1) + N ( x 1) + 2N( x + 1) N( x 1)) = = 2 2 σ + σ + = 0 2σ 2 Increases noise!!

10 Effects of noise Consider a single row or column of the image Plotting intensity as a function of position gives a signal #10 Where is the edge?
11 Solution: smooth first Where is the edge? #11
12 Derivative theorem of convolution #12 This saves us one operation:
13 Edge Detection Methods Most Common Edge Detectors: #13 Gradient operators Roberts Prewitt Sobel Gradient of Gaussian (Canny) Laplacian of Gaussian (Marr-Hildreth) Facet Model Based Edge Detector (Haralick)
14 Edge Detection Using the Gradient Definition of the gradient: #14 To save computations, the magnitude of gradient is usually approximated by:

15 Edge Detection Using the Gradient Properties of the gradient: #15 The magnitude of gradient provides information about the strength of the edge The direction of gradient is always perpendicular to the direction of the edge Main idea: Compute derivatives in x and y directions Find gradient magnitude Threshold gradient magnitude
16 Edge Detection Using the Gradient Estimating the gradient with finite differences #16 Approximation by finite differences:
17 Edge Detection Using the Gradient Example: Suppose we want to approximate the gradient magnitude at z 5 #17 We can implement I/ x and I/ y using the following masks: Note: M x is the approximation at (i, j + 1/2) and M y is the approximation at (i + 1/2, j)
18 Edge Detection Steps Using Gradient (i.e., sqrt is costly!)
19 Edge Detection Using the Gradient Example: #19 d dx I d dy I
20 Edge Detection Using the Gradient Example cont.: #20 = d dx I 2 + d dy I 2

21 Edge Detection Using the Gradient Example cont.: #21 Threshold =100
22 Roberts Edge Detector There are two forms of the Roberts Edge Detector: #22 1. The 2. The The second form of the equation is often used in practice due to its computational efficiency
23 Robert Edge Detection The Roberts edge detector #23 This approximation can be implemented by the following masks: Note: M x and M y are approximations at (i + 1/2, j + 1/2)
24 Roberts Edge Detector A simple approximation to the first derivative #24 Marks edge points only; it does not return any information about the edge orientation Simplest of the edge detection operators and will work best with binary images
25 Approximation of First Derivative Consider the arrangement of pixels about the pixel (i, j): 3 x 3 neighborhood: The partial derivatives can be computed by: The constant c implies the emphasis given to pixels closer to the center of the mask.
26 Prewitt Operator Setting c = 1, we get the Prewitt operator:
27 Sobel Operator Setting c = 2, we get the Sobel operator:
28 Sobel and Prewitt Detectors Approximates the gradient by using a row and a column mask, which approximates the first derivative in each direction #28 The Prewitt and Sobel edge detection masks find edges in both the horizontal and vertical directions, and then combine this information into a single metric
29 Sobel vs Prewitt The Prewitt is simpler to calculate than the Sobel, since the only coefficients are 1 s, which makes it easier to implement in hardware #29 However, the Sobel is defined to place emphasis on the pixels closer to the mask center, which may be desirable for some applications
30 Edge Detection Using the Gradient #30

31 Edge Detection Using the Gradient #31

32 Isotropy #32
33 Edge Detection with Gradient Filters #33
")
34 Edge Detection Using the Gradient Isotropic property of gradient magnitude: #34 The magnitude of gradient is an isotropic operator (it detects edges in any direction!!)

The noise suppression-localization tradeoff a larger filter reduces noise, but worsens")
35 Other Steps in Edge Detection Practical issues: Differential masks act as high-pass filters tend to amplify noise. Reduce the effects of noise - first smooth with a low-pass filter. 1)The noise suppression-localization tradeoff a larger filter reduces noise, but worsens localization (i.e., it adds uncertainty to the location of the edge) and vice-versa. #35


")
36 Noise Suppression vs Localization Noise suppression-localization tradeoff. Smoothing depends on mask size (e.g., depends on σ for Gaussian filters). Larger mask sizes reduce noise, but worsen localization (i.e., add uncertainty to the location of the edge) and vice versa. smaller mask larger mask

37 Other Steps in Edge Detection 2) How should we choose the threshold? #37

38 Other Steps in Edge Detection 3) Edge thinning and linking required to obtain good contours #38
39 Factors in Edge Detection Examples: #39 True edge Poor robustness to noise Poor localization Too many responses
40 Criteria for Optimal Edge Detection (1) Good detection Minimize the probability of false positives (i.e., spurious edges). Minimize the probability of false negatives (i.e., missing real edges). (2) Good localization Detected edges must be as close as possible to the true edges. (3) Single response Minimize the number of local maxima around the true edge. ( one point for the true edge )
41 Choice of Threshold Trade off of threshold value. gradient magnitude low threshold high threshold




42 Standard thresholding Standard thresholding: - Can only select strong edges. - Does not guarantee continuity. gradient magnitude low threshold high threshold
43 Hysteresis thresholding Hysteresis thresholding uses two thresholds: - low threshold t l - high threshold t h (usually, t h = 2t l ) t l t h t h t l For maybe edges, decide on the edge if neighboring pixel is a strong edge.

44 Hysteresis Thresholding Example #44
45 Edge Localization #45
46 Single Response #46
47 Canny edge detector This is probably the most widely used edge detector in computer vision Theoretical model: step-edges corrupted by additive Gaussian noise Canny has shown that the first derivative of the Gaussian closely approximates the operator that optimizes the product of signal-to-noise ratio and localization J. Canny, A Computational Approach To Edge Detection, IEEE Trans. Pattern Analysis and Machine Intelligence, 8: , Source: L. Fei-Fei
48 Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel wide ridges down to single pixel width 4. Thresholding and linking (hysteresis): Define two thresholds: low and high Use the high threshold to start edge curves and the low threshold to continue them Source: D. Lowe, L. Fei-Fei
49 The Canny Edge Detector #49
 g( x, y) g y ( x,")
50 The Canny Edge Detector The derivative of the Gaussian: #50 g x ( x, y) g( x, y) g y ( x, y)


51 The Canny Edge Detector Canny smoothing and derivatives: #51 f f x f y
52 The Canny Edge Detector Canny gradient magnitude: #52 image gradient magnitude
53 Edge Detection Canny Non-maxima suppression: #53 gradient magnitude thinned

54 Edge Detection Canny Hysteresis thresholding / Edge linking #54 regular t = 25 thinned Hysteresis High = 35 Low = 15

55 Edge Detection #55
56 Edge Detection Hysteresis thresholding / Edge linking cont. #56 The algorithm performs edge linking as a by-product of double-thresholding!!

57 Edge Detection #57
58 Properties of Canny Edge Detection #58
59 The Canny edge detector original image (Lena)


60 Compute Gradients X-Derivative of Gaussian Y-Derivative of Gaussian Gradient Magnitude

61 The Canny edge detector thresholding

62 Get Orientation at Each Pixel theta = atan2(-gy, gx)

63 The Canny edge detector
64 Canny Edges

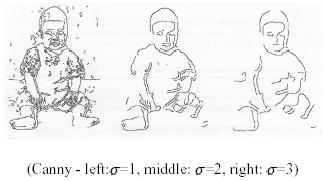
65 Effect of σ (Gaussian kernel spread/size) original Canny with Canny with The choice of depends on desired behavior large detects large scale edges small detects fine features
66 An edge is not a line... How can we detect lines? Next Lectures
67 Canny Edge Detection: Approximation #67
68 Fast Approximation of Canny Edge #68


69 Non-Maxima Suppression Non-maxima suppression #69 To find the edge points, we need to find the local maxima of the gradient magnitude. Broad ridges must be thinned so that only the magnitudes at the points of greatest local change remain. All values along the direction of the gradient that are not peak values of a ridge are suppressed.

70 No-maxima Suppression : Example #70
71 No-Maxima Suppression Explanation #71
72 Edge Detection Non-maxima suppression cont. #72
73 Edge Detection Non-maxima suppression cont. What are the neighbors? Look along gradient normal Quantization of normal directions: #73 tan θ = gradient direction Quantization : 0 : < tan θ : < tan θ < : tan θ : < tan θ

74 Non-maximum suppression Check if pixel is local maximum along gradient direction
75 No-Maxima Suppression #75
76 Before Non-max Suppression

77 After non-max suppression
78 Hysteresis Thresholding #80
79 Edge Detection Hysteresis thresholding / Edge linking #81 The output of non-maxima suppression still contains the local maxima created by noise. Can we get rid of them just by using a single threshold? if we set a low threshold, some noisy maxima will be accepted too. if we set a high threshold, true maxima might be missed (the value of true maxima will fluctuate above and below the threshold, fragmenting the edge). A more effective scheme is to use two thresholds: a low threshold t l a high threshold t h usually, t h 2t l
80 Hysteresis Thresholding: Algorithm #82
81 Principle of Hysteresis Thresholding #83

82 Threshold at low/high levels to get weak/strong edge pixels Do connected components, starting from strong edge pixels Hysteresis thresholding
83 Final Canny Edges

84 Edge Detection Using the 2 nd Derivative Edge points can be detected by finding the zerocrossings of the second derivative. #87 There are two operators in 2D that correspond to the second derivative: Laplacian Second directional derivative
85 Edge Detection Using the 2 nd Derivative
86 Edge Detection Using the 2 nd Derivative The Laplacian: #89

87 Edge Detection Using the 2 nd Derivative Example: #90 The Laplacian can be implemented using the mask: Example:
88 Variations of Laplacian
89 Edge Detection Using the 2 nd Derivative Properties of the Laplacian It is an isotropic operator. It is cheaper to implement (one mask only). It does not provide information about edge direction. It is more sensitive to noise (differentiates twice). #92 Find zero crossings Scan along each row, record an edge point at the location of zero-crossing. Repeat above step along each column
90 Edge Detection Using the 2 nd Derivative How do we estimate the edge strength? #93 Four cases of zero-crossings : {+,-} {+,0,-} {-,+} {-,0,+} Slope of zero-crossing {a, -b} is a+b. To mark an edge: compute slope of zero-crossing apply a threshold to slope
91 Laplacian of Gaussian (LoG) Look for zero-crossings of: #94 Laplacian of Gaussian operator
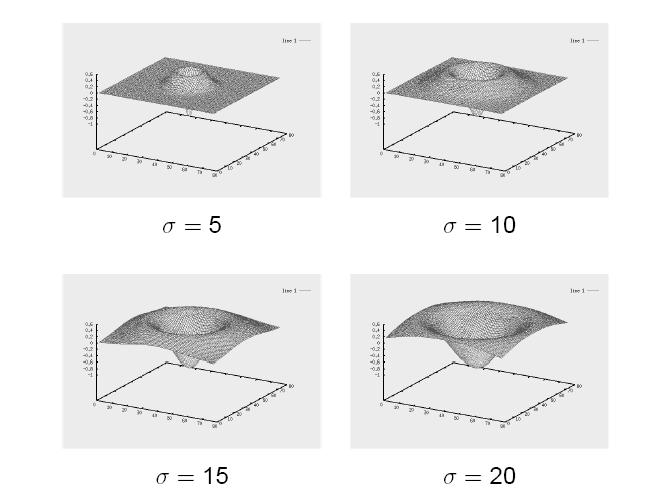
92 Laplacian of Gaussian (LoG) (Marr-Hildreth operator) To reduce the noise effect, the image is first smoothed. When the filter chosen is a Gaussian, we call it the LoG edge detector. σ controls smoothing It can be shown that: (inverted LoG) 2σ 2
 cont.")
, ( ), ( )], ( ), ( [ 2 2 y x")
93 Edge Detection Using the 2 nd Derivative The Laplacian-of-Gaussian (LOG) cont. It can be shown that: ), ( σ σ σ y x e y x y x G + + = ), ( ), ( )], ( ), ( [ 2 2 y x f y x G y x G y x f = #96
94 LoG #97

 -")
")


95 Laplacian of Gaussian (LoG) - (inverted LoG) Example (inverted LoG) filtering zero-crossings


96 Edge Detection Using the 2 nd Derivative The Laplacian-of-Gaussian (LOG) cont. I I * 2 ( G) #99 Zero crossings of I*( 2 G)



97 Edge Detection Using the 2 nd Derivative The Laplacian-of-Gaussian (LOG) cont. #100 σ =1 σ = 3 σ = 6


98 Gradient vs LoG Gradient works well when the image contains sharp intensity transitions and low noise. Zero-crossings of LOG offer better localization, especially when the edges are not very sharp. step edge ramp edge

99 Edge Detection Using the 2 nd Derivative Disadvantage of LOG edge detection: Does not handle corners well #102
100 Difference of Gaussians (DoG) The Laplacian of Gaussian can be approximated by the difference between two Gaussian functions: approximation actual LoG

 (a) (b)")
101 Difference of Gaussians (DoG) (cont d) (a) (b) (b)-(a)
102 Edge Detection Using the 2 nd Derivative Separability #105 Gaussian Filtering Image g(x) g(y) + I g Laplacian-of-Gaussian Filtering g xx (x) g(x) Image 2 + I * g g yy (y) g(y)
103 Edge Detection Using the 2 nd Derivative Separability Gaussian: A 2-D Gaussian can be separated into two 1-D Gaussians Perform 2 convolutions with 1-D Gaussians #106 h ( x, y) = I( x, y)* g( x, y) ( I( x, y)* g ( x) )* g ( ) h ( x, y) = 2 1 y n 2 multiplications per pixel 2n multiplications per pixel g 1 = [ ] g =
104 Edge Detection Using the 2 nd Derivative Separability Laplacian-of-Gaussian: #107 2 S = 2 ( ) ( 2 ) ( 2 g * I = g * I = I * g) Requires n 2 multiplications per pixel 2 S = ( I g ( x) ) g( x) + ( I g ( y) ) g( y) xx yy Requires 4n multiplications per pixel
105 Edge Detection Using the 2 nd Derivative Marr-Hildteth (LOG) Algorithm: #108 Compute LoG Use one 2D filter: Use four 1D filters: 2 g( x, y) g( x), g ( x), g( y), g ( y) Find zero-crossings from each row and column Find slope of zero-crossings Apply threshold to slope and mark edges xx yy
106 Edge Detection Using the 2 nd Derivative Disadvantage of LOG edge detection: Does not handle corners well Why? The derivative of the Gaussian: #109 The Laplacian of the Gaussian: (unoriented)
107 OTHER EDGE DETECTORS #110
108 Directional Derivative f The partial derivatives of f(x,y) will give the slope f/ x in the positive x direction and the slope f / y in the positive y direction. We can generalize the partial derivatives to calculate the slope in any direction (i.e., directional derivative).
109 Directional Derivative (cont d) Directional derivative computes intensity changes in a specified direction. Compute derivative in direction u

110 Directional Derivative (cont d) (From vector calculus) Directional derivative is a linear combination of partial derivatives. + =
111 Directional Derivative (cont d) u =1 u cos x u y θ =, sinθ = ux = cos θ, uy = sinθ u u + = cosθ sinθ
112 Compass Masks: #115 The Kirsch and Robinson edge detection masks are called compass masks since they are defined by taking a single mask and rotating it to the eight major compass orientations: North, Northwest, West, Southwest, South, Southeast, East, and Northeast
113 The edge magnitude is defined as the maximum value found by the convolution of each of the masks with the image #116 The edge direction is defined by the mask that produces the maximum magnitude Any of the edge detection masks can be extended by rotating them in a manner like the compass masks, which allows us to extract explicit information about edges in any direction
114 The Kirsch-Robinson masks are as follows: #117
115 Facet Model Based Edge Detector (Haralick) Assumes that an image is an array of samples of a continuous function f(x,y). Reconstructs f(x,y) from sampled pixel values. Uses directional derivatives which are computed analytically (i.e., without using discrete approximations). z=f(x,y)
 as a piecewise function.")
116 Facet Model For complex images, f(x,y) could contain extremely high powers of x and y. Idea: model f(x,y) as a piecewise function. Approximate each pixel value by fitting a bi-cubic polynomial in a small neighborhood around the pixel (facet).
117 Facet Model Steps (1) Fit a bi-cubic polynomial to a small neighborhood of each pixel (this step provides smoothing too). (2) Compute (analytically) the second and third directional derivatives in the direction of gradient. (3) Find points where (i) the second derivative is equal to zero and (ii) the third derivative is negative.
118 Fitting bi-cubic polynomial If a 5 x 5 neighborhood is used, the masks below can be used to compute the coefficients. Equivalent to least-squares (e.g., SVD)
119 Analytic computations of second and third directional derivatives Using polar coordinates
120 Compute analytically second and third directional derivatives Gradient angle θ (with positive y-axis at (0,0)): Locally approximate surface by a plane and use the normal to the plane to approximate the gradient.
121 Computing directional derivatives (cont d) The derivatives can be computed as follows: Second derivative equal to zero implies: Third derivative negative implies:
122 Edge Detection Using Facet Model (cont d) Steps
123 Edge Detection Review Edge detection operators are based on the idea that edge information in an image is found by looking at the relationship a pixel has with its neighbors If a pixel's gray level value is similar to those around it, there is probably not an edge at that point #126
124 Edge Detection Review Edge detection operators are often implemented with convolution masks and most are based on discrete approximations to differential operators #127 Differential operations measure the rate of change in a function, in this case, the image brightness function
125 Edge Detection Review Preprocessing of image is required to eliminate or at least minimize noise effects There is tradeoff between sensitivity and accuracy in edge detection The parameters that we can set so that edge detector is sensitive include the size of the edge detection mask and the value of the gray level threshold A larger mask or a higher gray level threshold will tend to reduce noise effects, but may result in a loss of valid edge points #128
126 Summary of Edge Detectors #129
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
DIGITAL IMAGE PROCESSING
 The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Review of Filtering. Filtering in frequency domain
 Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Edge Detection. Computer Vision Shiv Ram Dubey, IIIT Sri City
 Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director of Technology, OTTE, NEW YORK
 International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Filtering in frequency domain
 Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Edge Detection. CSC320: Introduction to Visual Computing Michael Guerzhoy. René Magritte, Decalcomania. Many slides from Derek Hoiem, Robert Collins
 Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
SRCEM, Banmore(M.P.), India
, India") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Edge Detection Operators on Digital Image Rajni Nema *1, Dr. A. K. Saxena 2 *1, 2 SRCEM, Banmore(M.P.), India Abstract Edge detection
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Edge Detection Operators on Digital Image Rajni Nema *1, Dr. A. K. Saxena 2 *1, 2 SRCEM, Banmore(M.P.), India Abstract Edge detection
Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical
 Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical Edges Diagonal Edges Hough Transform 6.1 Image segmentation
Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical Edges Diagonal Edges Hough Transform 6.1 Image segmentation
Concepts in. Edge Detection
 Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Announcements. Edge Detection. An Isotropic Gaussian. Filters are templates. Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3.
 Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
What Are Edges? Lecture 5: Gradients and Edge Detection. Boundaries of objects. Boundaries of Lighting. Types of Edges (1D Profiles)
") What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Edge Detection. CMPUT 206: Introduction to Digital Image Processing. Nilanjan Ray. Source:
 Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES
 SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique
 An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
Lesson 6: Contours. 1. Introduction. 2. Image filtering: Convolution. 3. Edge Detection. 4. Contour segmentation
 . Introduction Lesson 6: Contours 2. Image filtering: Convolution 3. Edge Detection Gradient detectors: Sobel Canny... Zero crossings: Marr-Hildreth 4. Contour segmentation Local tracking Hough transform
. Introduction Lesson 6: Contours 2. Image filtering: Convolution 3. Edge Detection Gradient detectors: Sobel Canny... Zero crossings: Marr-Hildreth 4. Contour segmentation Local tracking Hough transform
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
CS4670: Computer Vision Noah Snavely
 CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Feature Detectors - Sobel Edge Detector
 Page 1 of 5 Sobel Edge Detector Common Names: Sobel, also related is Prewitt Gradient Edge Detector Brief Description The Sobel operator performs a 2-D spatial gradient measurement on an image and so emphasizes
Page 1 of 5 Sobel Edge Detector Common Names: Sobel, also related is Prewitt Gradient Edge Detector Brief Description The Sobel operator performs a 2-D spatial gradient measurement on an image and so emphasizes
EDGE DETECTION-APPLICATION OF (FIRST AND SECOND) ORDER DERIVATIVE IN IMAGE PROCESSING
 ORDER DERIVATIVE IN IMAGE PROCESSING") Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Comparative Analysis of Various Edge Detection Techniques in Biometric Application
 Comparative Analysis of Various Edge Detection Techniques in Biometric Application Sanjay Kumar #1, Mahatim Singh #2 and D.K. Shaw #3 #1,2 Department of Computer Science and Engineering, NIT Jamshedpur
Comparative Analysis of Various Edge Detection Techniques in Biometric Application Sanjay Kumar #1, Mahatim Singh #2 and D.K. Shaw #3 #1,2 Department of Computer Science and Engineering, NIT Jamshedpur
(10) Image Segmentation
 Image Segmentation") (0) Image Segmentation - Image analysis Low-level image processing: inputs and outputs are all images Mid-/High-level image processing: inputs are images; outputs are information or attributes of the images
(0) Image Segmentation - Image analysis Low-level image processing: inputs and outputs are all images Mid-/High-level image processing: inputs are images; outputs are information or attributes of the images
Filtering Applications & Edge Detection. GV12/3072 Image Processing.
 Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
A Robust Method for Circle / Ellipse Extraction Based Canny Edge Detection
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
EECS490: Digital Image Processing. Lecture #20
 Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
the most common approach for detecting meaningful discontinuities in gray level. we discuss approaches for implementing
 Edge Detection FuJian the most common approach for detecting meaningful discontinuities in gray level. we discuss approaches for implementing first-order derivative (Gradient operator) second-order derivative
Edge Detection FuJian the most common approach for detecting meaningful discontinuities in gray level. we discuss approaches for implementing first-order derivative (Gradient operator) second-order derivative
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Performance Evaluation of Edge Detection Techniques for Images in Spatial Domain
 International Journal of Computer Theory and Engineering, Vol., No. 5, December, 009 793-80 Performance Evaluation of Edge Detection Techniques for Images in Spatial Domain Mamta Juneja, Parvinder Singh
International Journal of Computer Theory and Engineering, Vol., No. 5, December, 009 793-80 Performance Evaluation of Edge Detection Techniques for Images in Spatial Domain Mamta Juneja, Parvinder Singh
Concepts in. Edge Detection
 Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 636, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in Edge
Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 636, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in Edge
ELEN E4830 Digital Image Processing. Homework 6 Solution
 ELEN E4830 Digital Image Processing Homework 6 Solution Chuxiang Li cxli@ee.columbia.edu Department of Electrical Engineering, Columbia University April 10, 2006 1 Edge Detection 1.1 Sobel Operator The
ELEN E4830 Digital Image Processing Homework 6 Solution Chuxiang Li cxli@ee.columbia.edu Department of Electrical Engineering, Columbia University April 10, 2006 1 Edge Detection 1.1 Sobel Operator The
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Evaluation Of Image Detection Techniques
 Journal of Multidisciplinary Engineering Science and Technology (JMEST) Evaluation Of Image Detection Techniques U.I. Bature Department of Computer and Communications Engineering Abubakar Tafawa Balewa
Journal of Multidisciplinary Engineering Science and Technology (JMEST) Evaluation Of Image Detection Techniques U.I. Bature Department of Computer and Communications Engineering Abubakar Tafawa Balewa
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
CHAPTER 4 EDGE DETECTION TECHNIQUE
 56 CHAPTER 4 EDGE DETECTION TECHNIQUE The main and major aim of edge detection is to significantly reduce the amount of data significantly in an image, while preserving the structural properties to be
56 CHAPTER 4 EDGE DETECTION TECHNIQUE The main and major aim of edge detection is to significantly reduce the amount of data significantly in an image, while preserving the structural properties to be
REVIEW PAPER ON IMAGE EDGE DETECTION ALGORITHMS FOR SEGMENTATION
 REVIEW PAPER ON IMAGE EDGE DETECTION ALGORITHMS FOR SEGMENTATION Parvita Taya Department of CSE, AIMT, Karnal, Haryana, India Email- parvitataya@yahoo.co.in Abstract Computer vision is the rapid expanding
REVIEW PAPER ON IMAGE EDGE DETECTION ALGORITHMS FOR SEGMENTATION Parvita Taya Department of CSE, AIMT, Karnal, Haryana, India Email- parvitataya@yahoo.co.in Abstract Computer vision is the rapid expanding
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Segmentation I: Edges and Lines
 Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Filtering and Edge Detection. Computer Vision I. CSE252A Lecture 10. Announcement
 Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Linear Operations Using Masks
 Linear Operations Using Masks Masks are patterns used to define the weights used in averaging the neighbors of a pixel to compute some result at that pixel Expressing linear operations on neighborhoods
Linear Operations Using Masks Masks are patterns used to define the weights used in averaging the neighbors of a pixel to compute some result at that pixel Expressing linear operations on neighborhoods
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images