PART II: Local Consistency & Constraint Propagation
|
|
|
- Natalie Darlene Rogers
- 5 years ago
- Views:
Transcription
1 PART II: Local Consistency & Constraint Propagation
2 Solving CSPs Search algorithm. Usually backtracking search performing a depth-first traversal of a search tree. Local consistency and constraint propagation. Heuristics for branching on the search tree. which variable to branch on? which value to branch on? Search Local consistency & Propagation Heuristics
3 Solving CSPs Search algorithm. Usually backtracking search performing a depth-first traversal of a search tree. Local consistency and constraint propagation. Heuristics for branching on the search tree. which variable to branch on? which value to branch on? Search Local consistency & Propagation Heuristics What exactly are they? How do they work?
4 Outline Local Consistency Arc Consistency (AC) Generalized Arc Consistency (GAC) Bounds Consistency (BC) Higher Levels of Consistency Constraint Propagation Propagation Algorithms Specialized Propagation Algorithms Global Constraints Generalized Propagation Algorithms AC algorithms
5 Local Consistency Backtrack tree search aims to extend a partial assignment of variables to a complete and consistent one. Some inconsistent partial assignments obviously cannot be completed. Local consistency is a form of inference which detects inconsistent partial assignments. Consequently, the backtrack search commits into less inconsistent assignments. Local, because we examine individual constraints. Global consistency is NP-hard!
6 Local Consistency: An example D(X 1 ) = {1,2}, D(X 2 ) = {3,4}, C 1 : X 1 = X 2, C 2 : X 1 + X 2 1 X 1 = 1 X 1 = 2 all inconsistent partial assignments wrt the constraint C X 2 = 3 1 X 2 = 4 No need to check the other constraint. Unsatisfiability of the CSP can be inferred without having to search!
7 Several Local Consistencies Most popular local consistencies are domain based: Arc Consistency (AC); Generalised Arc Consistency (GAC); Bounds Consistency (BC). They detect inconsistent partial assignments of the form X i = j, hence: j can be removed from D(X i ) via propagation; propagation can be implemented easily.
8 Arc Consistency (AC) Defined for binary constraints. A binary constraint C is a relation on two variables X i and X j, giving the set of allowed combinations of values (i.e. tuples): C D(X i ) x D(X j ) E.g., D(X 1 ) = {0,1}, D(X 2 ) = {1,2}, C: X 1 < X 2 C(X 1,X 2 ) = {(0,1), (0,2), (1,2)}
9 Arc Consistency (AC) Defined for binary constraints. A binary constraint C is a relation on two variables X i and X j, giving the set of allowed combinations of values (i.e. tuples): C D(X i ) x D(X j ) E.g., D(X 1 ) = {0,1}, D(X 2 ) = {1,2}, C: X 1 < X 2 C(X 1,X 2 ) = {(0,1), (0,2), (1,2)} Each tuple (d 1,d 2 ) is called a support for C
10 Arc Consistency (AC) C is AC iff: forall v D(X i ), exists w D(X j ) s.t. (v,w) C. v D(X i ) is said to have/belong to a support wrt the constraint C. forall w D(X j ), exists v D(X i ) s.t. (v,w) C. w D(X j ) is said to have/belong to a support wrt the constraint C. A CSP is AC iff all its binary constraints are AC.
11 AC: An example D(X 1 ) = {1,2,3}, D(X 2 ) = {2,3,4}, C: X 1 = X 2 AC(C)? 1 D(X 1 ) does not have a support. 2 D(X 1 ) has 2 D(X 2 ) as support. Propagation! 3 D(X 1 ) has 3 D(X 2 ) as support. 2 D(X 2 ) has 2 D(X 1 ) as support. 3 D(X 2 ) has 3 D(X 1 ) as support. 4 D(X 2 ) does not have a support. X 1 = 1 and X 2 = 4 are inconsistent partial assignments. 1 D(X 1 ) and 4 D(X 2 ) must be removed to achieve AC. D(X 1 ) = {2,3}, D(X 2 ) = {2,3}, C: X 1 = X 2 AC(C)
12 Generalised Arc Consistency Generalisation of AC to k-ary constraints. A constraint C is a relation on k variables X 1,, X k : C D(X 1 ) x x D(X k ) E.g., D(X 1 ) = {0,1}, D(X 2 ) = {1,2}, D(X 2 ) = {2,3} C: X 1 + X 2 = X 3 C(X 1,X 2,X 3 ) = {(0,2,2), (1,1,2), (1,2,3)} A support is a tuple (d 1,,d k ) C where d i D(X i ).
13 Generalised Arc Consistency C is GAC iff: forall X i in {X 1,, X k }, forall v D(X i ), v belongs to a support. AC is a special case of GAC. A CSP is GAC iff all its constraints are GAC.
14 GAC: An example D(X 1 ) = {1,2,3}, D(X 2 ) = {1,2}, D(X 3 ) = {1,2} C: alldifferent([x 1, X 2, X 3 ]) GAC(C)? X 1 = 1 and X 1 = 2 are not supported! D(X 1 ) = {3}, D(X 2 ) = {1,2}, D(X 3 ) = {1,2} C: alldifferent([x 1, X 2, X 3 ]) GAC(C)
15 Bounds Consistency (BC) Defined for totally ordered (e.g. integer) domains. Relaxes the domain of X i from D(X i ) to [min(x i )..max(x i )]. E.g., D(X i ) = {1,3,5} [1..5]
16 Bounds Consistency (BC) A constraint C is a relation on k variables X 1,, X k : C D(X 1 ) x x D(X k ) A bound support is a tuple (d 1,,d k ) C where d i [min(x i )..max(xi)]. C is BC iff: forall X i in {X 1,, X k }, min(x i ) and max(x i ) belong to a bound support.
17 Bounds Consistency (BC) Disadvantage BC might not detect all GAC inconsistencies in general. Advantages Might be easier to look for a support in a range than in a domain. Achieving BC is often cheaper than achieving GAC. Achieving BC is enough to achieve GAC for monotonic constraints.
18 GAC = BC: An example
19 GAC = BC: An example If (v,w) is a support of X Y, then: for all u D(Y) s.t. u w: (v,u) is also a support; for all u D(X) s.t. u v: (u,w) is also a support. All values of D(X) smaller than or equal to max(y) are GAC. All values of D(Y) greater than or equal to min(x) are GAC. Enough to adjust max(x) and min(y).
20 GAC > BC: An example D(X 1 ) = D(X 2 ) = {1,2}, D(X 3 ) = D(X 4 ) = {2,3,5,6}, D(X 5 ) = {5}, D(X 6 ) = {3,4,5,6,7} C: alldifferent([x 1, X 2, X 3, X 4, X 5, X 6 ]) BC(C): 2 D(X 3 ) and 2 D(X 4 ) have no support. Original BC
 = D(X 4 ) = {2,3,5,6}, D(X")

![6 ]) GAC(C): {2,5} D(X 3 ), {2,5} D(X 4](/docs-images/89/99031077/images/21-3.jpg "), {3,5,6} D(X 6 ) have no support.")
21 GAC > BC: An example D(X 1 ) = D(X 2 ) = {1,2}, D(X 3 ) = D(X 4 ) = {2,3,5,6}, D(X 5 ) = {5}, D(X 6 ) = {3,4,5,6,7} C: alldifferent([x 1, X 2, X 3, X 4, X 5, X 6 ]) GAC(C): {2,5} D(X 3 ), {2,5} D(X 4 ), {3,5,6} D(X 6 ) have no support. Original BC GAC
22 Sudoku
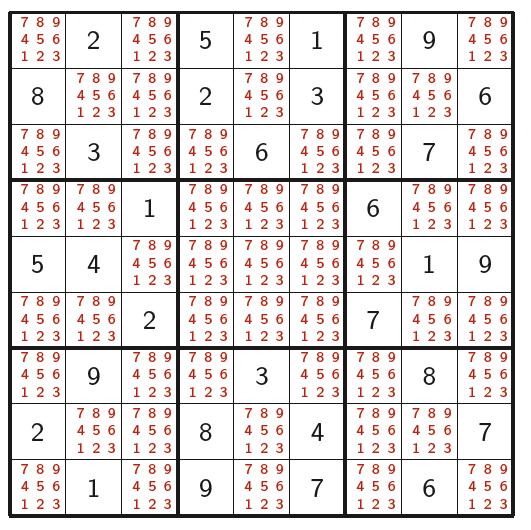
23 Sudoku
24 Sudoku with AC( )
25 Sudoku with BC(alldifferent)
26 Sudoku with GAC(alldifferent)
27 Higher Levels of Consistencies Path consistency, k-consistencies, (i,j) consistencies, Not much used in practice: detect inconsistent partial assignments with more than one <variable,value> pair. cannot be enforced by removing single values from domains. Domain based consistencies stronger than (G)AC. Singleton consistencies, triangle-based consistencies, Becoming popular. Shaving in scheduling.
28 Outline Local Consistency Arc Consistency (AC) Generalised Arc Consistency (GAC) Bounds Consistency (BC) Higher Levels of Consistency Constraint Propagation Constraint Propagation Algorithms Specialised Propagation Algorithms Global Constraints Generalized Propagation Algorithms AC Algorithms
29 Constraint Propagation Can appear under different names: constraint relaxation; filtering algorithm; local consistency enforcing, Similar concepts in other fields. E.g., unit propagation in SAT. Local consistencies define properties that a CSP must satisfy after constraint propagation: the operational behavior is completely left open; the only requirement is to achieve the required property on the CSP.
30 Constraint Propagation: A simple example Input CSP:D(X 1 ) = {1,2}, D(X 2 ) = {1,2}, C: X 1 < X 2 A constraint propagation algorithm for enforcing AC Output CSP:D(X 1 ) = {1}, D(X 2 ) = {2}, C: X 1 < X 2 We can write different algorithms with different complexities to achieve the same effect.
31 Constraint Propagation Algorithms A constraint propagation algorithm propagates a constraint C. It removes the inconsistent values from the domains of the variables of C. It makes C locally consistent. The level of consistency depends on C: GAC might be NP-complete, BC might not be possible,
32 Constraint Propagation Algorithms When solving a CSP with multiple constraints: propagation algorithms interact; a propagation algorithm can wake up an already propagated constraint to be propagated again! in the end, propagation reaches a fixed-point and all constraints reach a level of consistency; the whole process is referred as constraint propagation.
33 Constraint Propagation: An example D(X 1 ) = D(X 2 ) = D(X 3 )= {1,2,3} C 1 : alldifferent([x 1, X 2, X 3 ]) C 2 : X 2 < 3 C 3 : X 3 < 3 Let s assume: the order of propagation is C 1, C 2, C 3 ; each algorithm maintains (G)AC. Propagation of C 1 : nothing happens, C 1 is GAC. Propagation of C 2 : 3 is removed from D(X 2 ), C 2 is now AC. Propagation of C 3 : 3 is removed from D(X 3 ), C 3 is now AC. C 1 is not GAC anymore, because the supports of {1,2} D(X 1 ) in D(X 2 ) and D(X 3 ) are removed by the propagation of C 2 and C 3. Re-propagation of C 1 : 1 and 2 are removed from D(X 1 ), C 1 is now AC.
34 Properties of Constraint Propagation Algorithms It is not enough to remove inconsistent values from domains once. A constraint propagation algorithm must wake up again when necessary, otherwise may not achieve the desired local consistency property. Events that trigger a constraint propagation: when the domain of a variable changes; when a variable is assigned a value; when the minimum or the maximum values of a domain changes.
35 Outline Local Consistency Arc Consistency (AC) Generalised Arc Consistency (GAC) Bounds Consistency (BC) Higher Levels of Consistency Constraint Propagation Propagation Algorithms Specialized Propagation Algorithms Global Constraints Decompositions Ad-hoc algorithms Generalized Propagation Algorithms AC Algorithms
36 Specialized Propagation Algorithms A constraint propagation algorithm can be general or specialized: general, if it is applicable to any constraint; specialized, if it is specific to a constraint. Specialized algorithms Disadvantages Limited use. Not always easy to develop one. Advantages Exploits the constraint semantics. Potentially much more efficient than a general algorithm. Worth developing for recurring constraints.
37 Specialized Propagation Algorithms C: X 1 X 2 Observation A support of min(x 2 ) supports all the values in D(X 2 ). A support of max(x 1 ) supports all the values in D(X 1 ). Propagation algorithm Filter D(X 1 ) s.t. max(x 1 ) max(x 2 ). Filter D(X 2 ) s.t. min(x 1 ) min(x 2 ). The result is GAC (and thus BC).
38 Example D(X 1 ) = {3, 4, 7, 8}, D(X 2 ) = {1, 2, 3, 5}, C: X 1 X 2
39 Example D(X 1 ) = {3, 4, 7, 8}, D(X 2 ) = {1, 2, 3, 5}, C: X 1 X 2 Propagation Filter D(X 1 ) s.t. max(x 1 ) max(x 2 ).
40 Example D(X 1 ) = {3, 4, 7, 8}, D(X 2 ) = {1, 2, 3, 5}, C: X 1 X 2 Propagation Filter D(X 1 ) s.t. max(x 1 ) max(x 2 ).
41 Example D(X 1 ) = {3, 4, 7, 8}, D(X 2 ) = {1, 2, 3, 5}, C: X 1 X 2 Propagation Filter D(X 1 ) s.t. max(x 1 ) max(x 2 ). Filter D(X 2 ) s.t. min(x 1 ) min(x 2 ).
42 Example D(X 1 ) = {3, 4, 7, 8}, D(X 2 ) = {1, 2, 3, 5}, C: X 1 X 2 Propagation Filter D(X 1 ) s.t. max(x 1 ) max(x 2 ). Filter D(X 2 ) s.t. min(x 1 ) min(x 2 ).
43 Global Constraints Many real-life constraints are complex and not binary. Specialised algorithms are often developed for such constraints! A complex and n-ary constraint which encapsulates a specialised propagation algorithm is called a global constraint.
44 Examples of Global Constraints Alldifferent constraint alldifferent([x 1, X 2,, X n ]) holds iff X i X j for i < j {1,,n} Useful in a variety of context: timetabling (e.g. exams with common students must occur at different times) tournament scheduling (e.g. a team can play at most once in a week) configuration (e.g. a particular product cannot have repeating components)
45 Beyond Alldifferent NValue constraint One generalization of alldifferent. nvalue([x 1, X 2,, X n ], N) holds iff N = {X i 1 i n } nvalue([1, 2, 2, 1, 3], 3). alldifferent when N = n. Useful when values represent resources and we want to limit the usage of resources. E.g., minimize the total number of resources used; the total number of resources used must be between a specific interval;
46 Beyond Alldifferent Global cardinality constraint Another generalisation of alldifferent. gcc([x 1, X 2,, X n ], [v 1,, v m ], [O 1,, O m ]) iff forall j {1,, m} O j = {X i X i = v j, 1 i n } gcc([1, 1, 3, 2, 3], [1, 2, 3, 4], [2, 1, 2, 0]) Useful again when values represent resources. We can now limit the usage of each resource individually. E.g., resource 1 can be used at most three times; resource 2 can be used min 2 max 5 times;
47 Symmetry Breaking Constraints Consider the following scenario. [X 1, X 2,, X n ] and [Y 1, Y 2,, Y n ] represent the 2 day event assignments of a conference. Each day has n slots and the days are indistinguishable. Need to avoid symmetric assignments. Global constraints developed for this purpose are called symmetry breaking constraints. Lexicographic ordering constraint lex([x 1, X 2,, X n ], [Y 1, Y 2,, Y n ]) holds iff: X 1 < Y 1 OR (X 1 = Y 1 AND X 2 < Y 2 ) OR (X 1 = Y 1 AND X 2 = Y 2 AND. AND X n Y n ) lex ([1, 2, 4],[1, 3, 3])
48 Sequencing Constraints We might want a sequence of variables obey certain patterns. Global constraints developed for this purpose are called sequencing constraints.
49 Sequencing Constraints Sequence constraint Constrains the number of values taken from a given set in any sequence of k variables. sequence(l, u, k, [X 1, X 2,, X n ], v) iff among([x i, X i+1,, X i+k-1 ], v, l, u) for 1 i n-k+1 among([x 1, X 2,, X n ], v, l, u) iff l {i X i v, 1 i n } u E.g., every employee has 2 days off in any 7 day of period; at most 1 in 3 cars along the production line can have a sun-roof fitted.
50 Sequencing Constraints Sometimes patterns can be best described by grammars or automata that accept some language. Regular constraint regular([x 1, X 2,, X n ], A) holds iff <X 1, X 2,, X n > forms a string accepted by the DFA A (which accepts a regular language). regular([a, a, b], A), regular([b], A), regular([b, c, c, c, c, c], A) with A: a b Many global constraints are instances of regular. E.g., among, lex, strech, c
51 Scheduling Constraints We might want to schedule tasks with respective release times, duration, and deadlines, using limited resources in a time D. Global constraints developed for this purpose are called scheduling constraints.
52 Scheduling Constraints Cumulative constraint Useful for scheduling non-preemptive tasks who share a single resource with limited capacity. Given tasks t 1,.., t n, with each t i associated with 3 variables S i, D i, and C i, and a resource of capacity C: cumulative([s 1, S 2,, S n ], [D 1, D 2,, D n ], [C 1, C 2,, C n ], C) iff " i Si!u<S i +D i C i! C forall u in D
53 Scheduling Example Tom is moving house. He has 4 people to do the move and must move in 1 hour. Piano must be moved before bed.
54 Scheduling Example Tom is moving house. He has 4 people to do the move and must move in 1 hour. Piano must be moved before bed. D(P)=D(C)=D(B)=D(T)=[0..60], P + 30 B, P , C , B , T , cumulative([p,c,b,t], [30,10,20,15],[3,1,2,2],4)
![Scheduling Example 6 tasks [a,b,c,d,e,f,g] to place in an 5x20 box with the durations [2,6,2,2,5,6] requiring [1,2,4,2,2,2] units of resource with precedences as in the figure.](/docs-images/89/99031077/images/55-0.jpg "Model D(Sa)=D(Sb)=D(Sc)=D(Sd)=D(Se), D(Sf) = [0.")
55 Scheduling Example 6 tasks [a,b,c,d,e,f,g] to place in an 5x20 box with the durations [2,6,2,2,5,6] requiring [1,2,4,2,2,2] units of resource with precedences as in the figure. Model D(Sa)=D(Sb)=D(Sc)=D(Sd)=D(Se), D(Sf) = [0..20] Sa + 2 Sb, Sb + 6 Sc, Sd + 2 Se Sa , Sb , Sc , Sd , Se , Sf cumulative([sa,sb,sc,sd, Se, Sf], [2,6,2,2,5,6],[1,2,4,2,2,2],5)
56 Specialised Algorithms for Global Constraints How do we develop specialized algorithms for global constraints? Two main approaches: constraint decomposition; ad-hoc algorithm.
57 Constraint Decomposition A global constraint is decomposed into smaller and simpler constraints each which has a known propagation algorithm. Propagating each of the constraints gives a propagation algorithm for the original global constraint. A very effective and efficient method for some global constraints.
58 Decomposition of Among Among constraint - among([x 1, X 2,, X n ], [d 1, d 2,, d m ], N) iff N = {i X i {d 1, d 2,, d m }, 1 i n }
59 Decomposition of Among Among constraint - among([x 1, X 2,, X n ], [d 1, d 2,, d m ], N) iff N = {i X i {d 1, d 2,, d m }, 1 i n } Decomposition B i with D(B i ) = {0, 1} for 1 i n C i : B i = 1 X i {d 1, d 2,, d m } for 1 i n " i B i = N AC(C i ) for 1 i n and BC( on among. " i B i = N ) ensures GAC
60 Decomposition of Lex C: lex([x 1, X 2,, X n ], [Y 1, Y 2,, Y n ]) Decomposition - B i with D(B i ) = {0, 1} for 1 i n+1 to indicate the vectors have been ordered by position i-1 - B 1 = 0 - C i : (B i = B i+1 = 0 AND X i = Y i ) OR (B i = 0 AND B i+1 = 1 AND X i < Y i ) OR (B i = B i+1 = 1) for 1 i n GAC(C i ) ensures GAC on C.
61 Decomposition of Regular C: regular([x 1, X 2,, X n ], A) Decomposition Q i for 1 i n+1 to indicate the states of the DFA. Q 1 = starting state. Q n+1 = accepting state. C i (X i,q i, Q i+1 ) for 1 i n. C i (X i,q i Q i+1 ) iff DFA goes from Q i to Q i+1 on symbol X i. GAC(C i ) ensures GAC on C.
62 Constraint Decompositions May not always provide an effective propagation. Often GAC on the original constraint is stronger than (G)AC on the constraints in the decomposition. E.g., C: alldifferent([x 1, X 2,, X n ]) Decomposition C ij : X i X j for i < j {1,,n} AC on the decomposition is weaker than GAC on alldifferent. E.g., D(X 1 ) = D(X 2 ) = D(X 3 ) = {1,2}, C: alldifferent([x 1, X 2, X 3 ]) C 12, C 13, C 23 are all AC, but C is not GAC.
63 Constraint Decompositions C: lex([x 1, X 2,, X n ], [Y 1, Y 2,, Y n ]) OR decomposition - X 1 < Y 1 OR (X 1 = Y 1 AND X 2 < Y 2 ) OR (X 1 = Y 1 AND X 2 = Y 2 AND. AND X n Y n ) - AC on the decomposition is weaker than GAC on C. - E.g., D(X 1 ) = {0,1,2}, D(X 2 ) = {0,1}, D(Y 1 ) = {0,1}, D(Y 2 ) = {0,1} C: Lex([X 1, X 2 ], [Y 1, Y 2 ]) - C is not GAC but the decomposition does not prune anything.
64 Constraint Decompositions AND decomposition - X 1 Y 1 AND (X 1 = Y 1 X 2 Y 2 ) AND (X 1 = Y 1 AND X 2 = Y 2 AND. X n-1 = Y n-1 X n Y n ) - AC on the decomposition is weaker than GAC on C. - E.g., D(X 1 ) = {0, 1}, D(X 2 ) = {1}, D(Y 1 ) = {0,1}, D(Y 2 ) = {0} C: Lex([X 1, X 2 ], [Y 1, Y 2 ]) - C is not GAC but the decomposition does not prune anything.
65 Constraint Decompositions Different decompositions of a constraint may be incomparable. - Difficult to know which one gives a better propagation for a given instance of a constraint. C: Lex([X 1, X 2 ], [Y 1, Y 2 ]) - D(X 1 ) = {0, 1}, D(X 2 ) = {1}, D(Y 1 ) = {0,1}, D(Y 2 ) = {0} AND decomposition is weaker than GAC on lex, whereas OR decomposition maintains GAC. - D(X 1 ) = {0, 1, 2}, D(X 2 ) = {0, 1}, D(Y 1 ) = {0, 1}, D(Y 2 ) = {0, 1} OR decomposition is weaker than GAC on lex, whereas OR decomposition maintains GAC.
66 Constraint Decompositions Even if effective, may not always provide an efficient propagation. Often GAC on a constraint via a specialised algorithm is maintained faster than (G)AC on the constraints in the decomposition.
67 Constraint Decompositions C: Lex([X 1, X 2 ], [Y 1, Y 2 ]) - D(X 1 ) = {0, 1}, D(X 2 ) = {0, 1}, D(Y 1 ) = {1}, D(Y 2 ) = {0} AND decomposition is weaker than GAC on C, whereas OR decomposition maintains GAC on C. - D(X 1 ) = {0, 1, 2}, D(X 2 ) = {0, 1}, D(Y 1 ) = {0, 1}, D(Y 2 ) = {0, 1} OR decomposition is weaker than GAC on C, whereas OR decomposition maintains GAC on C. AND or OR decompositions have complementary strengths. - Combining them gives us a decomposition which maintains GAC on C. Too many constraints to post and propagate! A dedicated algorithm runs amortized in O(1).
68 Dedicated Algorithms Dedicated ad-hoc algorithms provide effective and efficient propagation. Often: GAC is maintained in polynomial time; many more inconsistent values are detected compared to the decompositions.
69 Benefits of Global Constraints Modeling benefits Reduce the gap between the problem statement and the model. Capture recurring modeling patterns. May allow the expression of constraints that are otherwise not possible to state using primitive constraints (semantic). Solving benefits More inference in propagation (operational). More efficient propagation (algorithmic).
70 Dedicated GAC Algorithm for Sum! i X i = N C: variable. where D(X i )= {0,1} and N is an integer
71 Dedicated GAC Algorithm for Sum! i X i = N C: variable. where D(X i )= {0,1} and N is an integer! i min(n) min(x i ) max(n)! max(x i ) i min(x i ) min(n) - " max(x j ) j!i for 1 i n max(x i ) max(n) - min(x j ) for 1 i n " j!i
72 Dedicated GAC Algorithm for Alldifferent alldifferent([x 1, X 2,, X n ]) Runs in time O(d 2 n 2.5 ). Establishes a relation between the solutions of the constraint and the properties of a graph. Maximal matching in a bipartite graph.


73 Dedicated GAC Algorithm for Alldifferent A bipartite graph is a graph whose vertices are divided into two disjoint sets U and V such that every edge connects a vertex in U to one in V.

74 Dedicated GAC Algorithm for Alldifferent A matching in a graph is a subset of its edges such that no two edges have a node in common. Maximal matching is the largest possible matching. In a bipartite graph, maximal matching covers one set of nodes.
75 Dedicated GAC Algorithm for Alldifferent Observation Construct a bipartite graph G between the variables [X 1, X 2,, X n ] and their possible values {1,, d} (variable-value graph). An assignment of values to the variables is a solution iff it corresponds to a maximal matching in G. A maximal matching covers all the variables. Use matching theory to compute all maximal matchings efficiently. One maximal matching can describe all maximal matchings!
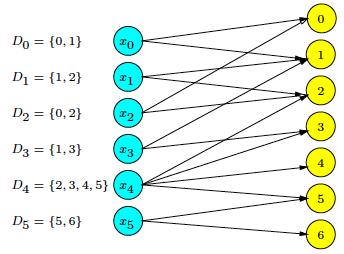
76 Example Variable-value graph

77 A First Maximal Matching

78 Another Maximal Matching
79 Matching Notations Edge: matching if takes part in a matching; free otherwise. Node: Matched if incident to a matching edge; free otherwise. Vital edge: belongs to every maximal matching.

80 Free, Matched, Matching
81 Algorithm Compute all maximal matchings. No maximal matching exists failure. An edge free in all maximal matchings Remove the edge. Amounts to removing the corresponding value from the domain of the corresponding variable. A vital edge Keep the edge. Amounts to assigning the corresponding value to the corresponding variable. Edges matching in some but not all maximal matchings Keep the edge.
82 All Maximal Matchings Use matching theory to compute all maximal matchings efficiently. One maximal matching can describe all maximal matchings! Connection between the edges of one matching and edges in the other matchings.
83 Alternating Path and Cycle Alternating path Simple path with edges alternating free and matching. Alternating cycle Cycle with edges alternating free and matching. Length of path/cycle Number of edges in the path/cycle. Even path/cycle Path/cycle of even length.
84 Matching Theory An edge e belongs to a maximal matching iff: For some arbitrary maximal matching M: Either e belongs to even alternating path starting at a free node; Or e belongs to an even alternating cycle. The result is due to Claude Berge in 1970.
85 Oriented Graph As we are interested in even alternating path/cycle, we orient edges of an arbitrary maximal matching for simplicity: Matching edges from variable to value; Free edges from value to variable.

86 An Arbitrary Maximal Matching
87 Oriented Graph
88 Even Alternating Paths Start from a free node and search for all nodes on directed simple path. Mark all edges on path. Alternation built-in. Start from a value node. Variable nodes are all matched. Finish at a value node for even length.
89 Even Alternating Paths

90 Even Alternating Paths Intuition: edges can be permuted.
91 Even Alternating Cycles Compute strongly connected components (SCCs). Two nodes a and b are strongly connected iff there is a path from a to b and a path from b to a. Strongly connected component: any two nodes are strongly connected. Alternation and even length built-in. Mark all edges in all strongly connected components.
92 Even Alternating Cycles

93 Even Alternating Cycles Intuition: variables consume all the values.

94 All Marked Edges
95 Removing Edges Remove the edges which are: free (does not occur in our arbitrary maximal matching) and not marked (does not occur in any maximal matching); marked as black in our example. Keep the edge matched and not marked. Marked as red in our example. Vital edge!

96 Removing Edges
 = {3}, D(X 5 ) = {4,5}, D(X 6 ) =")
97 Edges Removed D(X 1 ) = {0,1}, D(X 2 ) = {1,2}, D(X 3 ) = {0,2}, D(X 4 ) = {3}, D(X 5 ) = {4,5}, D(X 6 ) = {5,6}
98 Summary of the Algorithm Construct the variable-value graph. Find a maximal matching M; otherwise fail. Orient graph (done while computing M). Mark edges starting from free value nodes using graph search. Compute SCCs and mark joining edges. Remove not marked and free edges. Complexity: O(d 2 n 2.5 ) O(nd) for SCCs O(n 1.5 d) for computing a maximal matching
99 Incremental Properties Keep the variable and value graph between different invocations. When re-executed: remove marks on edges; remove edges not in the domains of the respective variables; if a matching edge is removed, compute a new maximal matching; otherwise just repeat marking and removal.
100 Dedicated Algorithms Is it always easy to develop a dedicated algorithm for a given constraint? There s no single recipe! A nice semantics often gives us a clue! Graph Theory Flow Theory Combinatorics Complexity Theory, GAC may as well be NP-hard! In that case, algorithms which maintain weaker consistencies (like BC) are of interest.
101 GAC for Nvalue Constraint nvalue([x 1, X 2,, X n ], N) holds iff N = {X i 1 i n } Reduction from 3 SAT. - Given a Boolean fomula in k variables (labelled from 1 to k) and m clauses, we construct an instance of nvalue([x 1, X 2,, X k+m ], N): D(X i ) = {i, i } for i {1,, k} where X i represents the truth assignment of the SAT variables; X i where i > k represents a SAT clause (disjunction of literals); for a given clause like x V y V z, D(X i ) = {x, y, z}. - By construction, [X 1,, X k ] will consume all the k distinct values. - When N = k, nvalue has a solution iff the original SAT problem has a satisfying assignment. Otherwise we will have more than k distinct values. Hence, testing a value for support is NP-complete, and enforcing GAC is NP-hard!
102 GAC for Nvalue Constraint E.g., C 1 : (a OR b OR c) AND C 2 : (a OR b OR d) AND C 3 : (b OR c OR d) The formula has 4 variables (a, b, c, d) and 3 clauses (C 1, C 2, C 3 ). We construct nvalue([x 1, X 2,, X 7 ], 4) where: - D(X 1 ) = {a, a }, D(X 2 ) = {b, b }, D(X 3 ) = {c, c }, D(X 4 ) = {d, d }, D(X 5 ) = {a, b, c}, D(X 6 ) = {a, b, d}, D(X 7 ) = {b, c, d} An assignment to X 1,, X 4 will consume 4 distinct values. Not to exceed 4 distinct values, the rest of the variables must have intersecting values with X 1,, X 4. Such assignments will make the SAT formula TRUE.
103 Outline Local Consistency Arc Consistency (AC) Generalised Arc Consistency (GAC) Bounds Consistency (BC) Higher Levels of Consistency Constraint Propagation Propagation Algorithms Specialized Propagation Algorithms Global Constraints Decompositions Ad-hoc algorithms Generalized Propagation Algorithms AC Algorithms
104 Generalized Propagation Algorithms Not all constraints have nice semantics we can exploit to devise an efficient specialized propagation algorithm. Consider a product configuration problem. Compatibility constraints on hardware components: only certain combinations of components work together. Compatibility may not be a simple pairwise relationship: video cards supported function of motherboard, CPU, clock speed, O/S,...
105 Production Configuration Problem 5-ary constraint: Compatible (motherboard345, intelcpu, 2GHz, 1GBRam, 80GBdrive).) Compatible (motherboard346, intelcpu, 3GHz, 2GBRam, 100GBdrive). Compatible (motherboard346, amdcpu, 2GHz, 2GBRam, 100GBdrive).
![Crossword Puzzle Constraints with different arity: Word 1 ([X 1,X 2,X 3 ]) Word 2 ([X](/docs-images/89/99031077/images/106-0.jpg "1,X 13,X 16 ]) No simple way to decide acceptable words other than to put them in a")
106 Crossword Puzzle Constraints with different arity: Word 1 ([X 1,X 2,X 3 ]) Word 2 ([X 1,X 13,X 16 ]) No simple way to decide acceptable words other than to put them in a table.
107 GAC Schema A generic propagation algorithm. Enforces GAC on an n-ary constraint given by: a set of allowed tuples; a set of disallowed tuples; a predicate answering if a constraint is satisfied or not. Sometimes called the table constraint: user supplies table of acceptable values. Complexity: O(ed n ) time Hence, n cannot be too large! Many solvers limits it to 3 or so.
108 Arc Consistency Algorithms Generic AC algorithms with different complexities and advantages: AC3 AC4 AC6 AC2001
109 AC-3 Idea Revise (X i, C): removes unsupported values of X i and returns TRUE. Place each (X i, C) where X i participates to C and its domain is potentially not AC, in a queue Q; while Q is not empty: select and remove (X i, C) from Q; if revise(x i, C) then If D(X i ) = { } then return FALSE; else place {(X j, C ) X i, X j participate in some C } into Q.
110 AC-3 AC-3 achieves AC on binary CSPs in O(ed 3 ) time and O(e) space. Time complexity is not optimal Revise does not remember anything about past computations and re-does unnecessary work.
111 AC-3 (X, C 1 ) is put in Q only check of X 3 was necessary!
112 AC-4 Stores max. amount of info in a preprocessing step so as to avoid redoing the same constraints checks. Idea: Start with an empty queue Q. Maintain counter[x i, v j, X k ] where X i, X k participate in a constraint C ik and v j D(X i ) Stores the number of supports for X i v j on C ik. Place all supports of X i v j (in all constraints) in a list S[X i, v j ].
113 AC-4 Initialisation: All possible constraint checks are performed. Each time a support for X i v j is found, the corresponding counters and lists are updated. Each time a support for X i v j is not found, remove v j from D(X i ) and place (X i, v j ) in Q for future propagation. If D(X i ) = { } then return FALSE.
114 AC-4 Propagation: While Q is not empty: Select and remove (X i, v j ) from Q; For each (X k, v t ) in S[X i, v j ] If v t D(X k ) then decrement counter[x k, v t, X i ] If counter[x k, v t, X i ] = 0 then Remove v t from D(X k ); add (X k, v t ) to Q If D(X k ) = { } then return FALSE.
115 AC-4 No additional constraint check! (y,3) is put in Q
116 AC-4 AC-4 achieves AC on binary CSPs in O(ed 2 ) time and O(ed 2 ) space. Time complexity is optimal Space complexity is not optimal AC-6 and AC-2001 achieve AC on binary CSPs in O(ed 2 ) time and O(ed) space. Time complexity is optimal Space complexity is optimal
Solving Constraint Problems in Constraint Programming
 Solving Constraint Problems in Constraint Programming Zeynep KIZILTAN Department of Computer Science University of Bologna Email: zeynep@cs.unibo.it What is it about? 10 hour lectures about the core of
Solving Constraint Problems in Constraint Programming Zeynep KIZILTAN Department of Computer Science University of Bologna Email: zeynep@cs.unibo.it What is it about? 10 hour lectures about the core of
Constraint Propagation: The Heart of Constraint Programming
 Constraint Propagation: The Heart of Constraint Programming Zeynep KIZILTAN Department of Computer Science University of Bologna Email: zeynep@cs.unibo.it URL: http://zeynep.web.cs.unibo.it/ What is it
Constraint Propagation: The Heart of Constraint Programming Zeynep KIZILTAN Department of Computer Science University of Bologna Email: zeynep@cs.unibo.it URL: http://zeynep.web.cs.unibo.it/ What is it
Range and Roots: Two Common Patterns for Specifying and Propagating Counting and Occurrence Constraints
 Range and Roots: Two Common Patterns for Specifying and Propagating Counting and Occurrence Constraints Christian Bessiere LIRMM, CNRS and U. Montpellier Montpellier, France bessiere@lirmm.fr Brahim Hnich
Range and Roots: Two Common Patterns for Specifying and Propagating Counting and Occurrence Constraints Christian Bessiere LIRMM, CNRS and U. Montpellier Montpellier, France bessiere@lirmm.fr Brahim Hnich
Constraint Satisfaction Problems. Chapter 6
 Constraint Satisfaction Problems Chapter 6 Constraint Satisfaction Problems A constraint satisfaction problem consists of three components, X, D, and C: X is a set of variables, {X 1,..., X n }. D is a
Constraint Satisfaction Problems Chapter 6 Constraint Satisfaction Problems A constraint satisfaction problem consists of three components, X, D, and C: X is a set of variables, {X 1,..., X n }. D is a
Constraint (Logic) Programming
 Programming") Constraint (Logic) Programming Roman Barták Faculty of Mathematics and Physics, Charles University in Prague, Czech Republic bartak@ktiml.mff.cuni.cz Sudoku Combinatorial puzzle, whose goal is to enter
Constraint (Logic) Programming Roman Barták Faculty of Mathematics and Physics, Charles University in Prague, Czech Republic bartak@ktiml.mff.cuni.cz Sudoku Combinatorial puzzle, whose goal is to enter
Implementing Logical Connectives in Constraint Programming
 Implementing Logical Connectives in Constraint Programming Christopher Jefferson, Neil CA Moore, Peter Nightingale, Karen E Petrie* * School of Computing, University of Dundee, Dundee DD1 4HN, UK email:
Implementing Logical Connectives in Constraint Programming Christopher Jefferson, Neil CA Moore, Peter Nightingale, Karen E Petrie* * School of Computing, University of Dundee, Dundee DD1 4HN, UK email:
Constraint Programming. Global Constraints. Amira Zaki Prof. Dr. Thom Frühwirth. University of Ulm WS 2012/2013
 Global Constraints Amira Zaki Prof. Dr. Thom Frühwirth University of Ulm WS 2012/2013 Amira Zaki & Thom Frühwirth University of Ulm Page 1 WS 2012/2013 Overview Classes of Constraints Global Constraints
Global Constraints Amira Zaki Prof. Dr. Thom Frühwirth University of Ulm WS 2012/2013 Amira Zaki & Thom Frühwirth University of Ulm Page 1 WS 2012/2013 Overview Classes of Constraints Global Constraints
Constraint Satisfaction Problems
 Constraint Satisfaction Problems CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2013 Soleymani Course material: Artificial Intelligence: A Modern Approach, 3 rd Edition,
Constraint Satisfaction Problems CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2013 Soleymani Course material: Artificial Intelligence: A Modern Approach, 3 rd Edition,
Chapter 10 Part 1: Reduction
 //06 Polynomial-Time Reduction Suppose we could solve Y in polynomial-time. What else could we solve in polynomial time? don't confuse with reduces from Chapter 0 Part : Reduction Reduction. Problem X
//06 Polynomial-Time Reduction Suppose we could solve Y in polynomial-time. What else could we solve in polynomial time? don't confuse with reduces from Chapter 0 Part : Reduction Reduction. Problem X
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
Round 4: Constraint Satisfaction Problems (CSP)
") Round 4: Constraint Satisfaction Problems (CSP) Tommi Junttila Aalto University School of Science Department of Computer Science CS-E3220 Declarative Programming Spring 2018 Tommi Junttila (Aalto University)
Round 4: Constraint Satisfaction Problems (CSP) Tommi Junttila Aalto University School of Science Department of Computer Science CS-E3220 Declarative Programming Spring 2018 Tommi Junttila (Aalto University)
Constraint Satisfaction Problems. slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig, Jean-Claude Latombe
 Constraint Satisfaction Problems slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig, Jean-Claude Latombe Standard search problems: State is a black box : arbitrary data structure Goal test
Constraint Satisfaction Problems slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig, Jean-Claude Latombe Standard search problems: State is a black box : arbitrary data structure Goal test
Constraint Satisfaction. AI Slides (5e) c Lin
 c Lin") Constraint Satisfaction 4 AI Slides (5e) c Lin Zuoquan@PKU 2003-2018 4 1 4 Constraint Satisfaction 4.1 Constraint satisfaction problems 4.2 Backtracking search 4.3 Constraint propagation 4.4 Local search
Constraint Satisfaction 4 AI Slides (5e) c Lin Zuoquan@PKU 2003-2018 4 1 4 Constraint Satisfaction 4.1 Constraint satisfaction problems 4.2 Backtracking search 4.3 Constraint propagation 4.4 Local search
The Complexity of Global Constraints
 The Complexity of Global Constraints Christian Bessiere LIRMM-CNRS Montpellier, France email: bessiere@lirmm.fr Emmanuel Hebrard and Brahim Hnich and Toby Walsh Cork Constraint Computation Centre University
The Complexity of Global Constraints Christian Bessiere LIRMM-CNRS Montpellier, France email: bessiere@lirmm.fr Emmanuel Hebrard and Brahim Hnich and Toby Walsh Cork Constraint Computation Centre University
Module 4. Constraint satisfaction problems. Version 2 CSE IIT, Kharagpur
 Module 4 Constraint satisfaction problems Lesson 10 Constraint satisfaction problems - II 4.5 Variable and Value Ordering A search algorithm for constraint satisfaction requires the order in which variables
Module 4 Constraint satisfaction problems Lesson 10 Constraint satisfaction problems - II 4.5 Variable and Value Ordering A search algorithm for constraint satisfaction requires the order in which variables
CS 771 Artificial Intelligence. Constraint Satisfaction Problem
 CS 771 Artificial Intelligence Constraint Satisfaction Problem Constraint Satisfaction Problems So far we have seen a problem can be solved by searching in space of states These states can be evaluated
CS 771 Artificial Intelligence Constraint Satisfaction Problem Constraint Satisfaction Problems So far we have seen a problem can be solved by searching in space of states These states can be evaluated
10/11/2017. Constraint Satisfaction Problems II. Review: CSP Representations. Heuristic 1: Most constrained variable
 //7 Review: Constraint Satisfaction Problems Constraint Satisfaction Problems II AIMA: Chapter 6 A CSP consists of: Finite set of X, X,, X n Nonempty domain of possible values for each variable D, D, D
//7 Review: Constraint Satisfaction Problems Constraint Satisfaction Problems II AIMA: Chapter 6 A CSP consists of: Finite set of X, X,, X n Nonempty domain of possible values for each variable D, D, D
Local Consistency in Weighted CSPs and Inference in Max-SAT
 Local Consistency in Weighted CSPs and Inference in Max-SAT Student name: Federico Heras Supervisor name: Javier Larrosa Universitat Politecnica de Catalunya, Barcelona, Spain fheras@lsi.upc.edu,larrosa@lsi.upc.edu
Local Consistency in Weighted CSPs and Inference in Max-SAT Student name: Federico Heras Supervisor name: Javier Larrosa Universitat Politecnica de Catalunya, Barcelona, Spain fheras@lsi.upc.edu,larrosa@lsi.upc.edu
Bound Consistency for Binary Length-Lex Set Constraints
 Bound Consistency for Binary Length-Lex Set Constraints Pascal Van Hentenryck and Justin Yip Brown University, Box 1910 Carmen Gervet Boston University, Providence, RI 02912 808 Commonwealth Av. Boston,
Bound Consistency for Binary Length-Lex Set Constraints Pascal Van Hentenryck and Justin Yip Brown University, Box 1910 Carmen Gervet Boston University, Providence, RI 02912 808 Commonwealth Av. Boston,
8.1 Polynomial-Time Reductions
 8.1 Polynomial-Time Reductions Classify Problems According to Computational Requirements Q. Which problems will we be able to solve in practice? A working definition. Those with polynomial-time algorithms.
8.1 Polynomial-Time Reductions Classify Problems According to Computational Requirements Q. Which problems will we be able to solve in practice? A working definition. Those with polynomial-time algorithms.
Lecture 18. Questions? Monday, February 20 CS 430 Artificial Intelligence - Lecture 18 1
 Lecture 18 Questions? Monday, February 20 CS 430 Artificial Intelligence - Lecture 18 1 Outline Chapter 6 - Constraint Satisfaction Problems Path Consistency & Global Constraints Sudoku Example Backtracking
Lecture 18 Questions? Monday, February 20 CS 430 Artificial Intelligence - Lecture 18 1 Outline Chapter 6 - Constraint Satisfaction Problems Path Consistency & Global Constraints Sudoku Example Backtracking
Constraint Satisfaction Problems
 Constraint Satisfaction Problems In which we see how treating states as more than just little black boxes leads to the invention of a range of powerful new search methods and a deeper understanding of
Constraint Satisfaction Problems In which we see how treating states as more than just little black boxes leads to the invention of a range of powerful new search methods and a deeper understanding of
Constraint Programming
 1 / 28 Constraint Programming Lecture 4. Global Constraints. Ruslan Sadykov INRIA Bordeaux Sud-Ouest 5 February 2018 2 / 28 Importance of global constraints A global constraint is a union of simple constraints.
1 / 28 Constraint Programming Lecture 4. Global Constraints. Ruslan Sadykov INRIA Bordeaux Sud-Ouest 5 February 2018 2 / 28 Importance of global constraints A global constraint is a union of simple constraints.
A Fast Arc Consistency Algorithm for n-ary Constraints
 A Fast Arc Consistency Algorithm for n-ary Constraints Olivier Lhomme 1 and Jean-Charles Régin 2 1 ILOG, 1681, route des Dolines, 06560 Valbonne, FRANCE 2 Computing and Information Science, Cornell University,
A Fast Arc Consistency Algorithm for n-ary Constraints Olivier Lhomme 1 and Jean-Charles Régin 2 1 ILOG, 1681, route des Dolines, 06560 Valbonne, FRANCE 2 Computing and Information Science, Cornell University,
Class2: Constraint Networks Rina Dechter
 Algorithms for Reasoning with graphical models Class2: Constraint Networks Rina Dechter Dbook: chapter 2-3, Constraint book: chapters 2 and 4 Text Books Road Map Graphical models Constraint networks Model
Algorithms for Reasoning with graphical models Class2: Constraint Networks Rina Dechter Dbook: chapter 2-3, Constraint book: chapters 2 and 4 Text Books Road Map Graphical models Constraint networks Model
Binary Encodings of Non-binary Constraint Satisfaction Problems: Algorithms and Experimental Results
 Journal of Artificial Intelligence Research 24 (2005) 641-684 Submitted 04/05; published 11/05 Binary Encodings of Non-binary Constraint Satisfaction Problems: Algorithms and Experimental Results Nikolaos
Journal of Artificial Intelligence Research 24 (2005) 641-684 Submitted 04/05; published 11/05 Binary Encodings of Non-binary Constraint Satisfaction Problems: Algorithms and Experimental Results Nikolaos
Artificial Intelligence
 Contents Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller What
Contents Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller What
Artificial Intelligence
 Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
Artificial Intelligence 5. Constraint Satisfaction Problems CSPs as Search Problems, Solving CSPs, Problem Structure Wolfram Burgard, Andreas Karwath, Bernhard Nebel, and Martin Riedmiller SA-1 Contents
3 No-Wait Job Shops with Variable Processing Times
 3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
Lecture 6: Constraint Satisfaction Problems (CSPs)
") Lecture 6: Constraint Satisfaction Problems (CSPs) CS 580 (001) - Spring 2018 Amarda Shehu Department of Computer Science George Mason University, Fairfax, VA, USA February 28, 2018 Amarda Shehu (580)
Lecture 6: Constraint Satisfaction Problems (CSPs) CS 580 (001) - Spring 2018 Amarda Shehu Department of Computer Science George Mason University, Fairfax, VA, USA February 28, 2018 Amarda Shehu (580)
Example: Map coloring
 Today s s lecture Local Search Lecture 7: Search - 6 Heuristic Repair CSP and 3-SAT Solving CSPs using Systematic Search. Victor Lesser CMPSCI 683 Fall 2004 The relationship between problem structure and
Today s s lecture Local Search Lecture 7: Search - 6 Heuristic Repair CSP and 3-SAT Solving CSPs using Systematic Search. Victor Lesser CMPSCI 683 Fall 2004 The relationship between problem structure and
NP and computational intractability. Kleinberg and Tardos, chapter 8
 NP and computational intractability Kleinberg and Tardos, chapter 8 1 Major Transition So far we have studied certain algorithmic patterns Greedy, Divide and conquer, Dynamic programming to develop efficient
NP and computational intractability Kleinberg and Tardos, chapter 8 1 Major Transition So far we have studied certain algorithmic patterns Greedy, Divide and conquer, Dynamic programming to develop efficient
Among, Common and Disjoint Constraints
 Among, Common and Disjoint Constraints Christian Bessiere 1, Emmanuel Hebrard 2, Brahim Hnich 3, Zeynep Kiziltan 4,andTobyWalsh 2 1 LIRMM, CNRS/University of Montpellier, France bessiere@lirmm.fr 2 NICTA
Among, Common and Disjoint Constraints Christian Bessiere 1, Emmanuel Hebrard 2, Brahim Hnich 3, Zeynep Kiziltan 4,andTobyWalsh 2 1 LIRMM, CNRS/University of Montpellier, France bessiere@lirmm.fr 2 NICTA
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 30 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapter 7: Constraint satisfaction problems CHAPTER 7: CONSTRAINT SATISFACTION PROBLEMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 30 January, 2018 1 TABLE
DIT411/TIN175, Artificial Intelligence Chapter 7: Constraint satisfaction problems CHAPTER 7: CONSTRAINT SATISFACTION PROBLEMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 30 January, 2018 1 TABLE
2. Modeling AEA 2018/2019. Based on Algorithm Engineering: Bridging the Gap Between Algorithm Theory and Practice - ch. 2
 2. Modeling AEA 2018/2019 Based on Algorithm Engineering: Bridging the Gap Between Algorithm Theory and Practice - ch. 2 Content Introduction Modeling phases Modeling Frameworks Graph Based Models Mixed
2. Modeling AEA 2018/2019 Based on Algorithm Engineering: Bridging the Gap Between Algorithm Theory and Practice - ch. 2 Content Introduction Modeling phases Modeling Frameworks Graph Based Models Mixed
Mathematical Programming Formulations, Constraint Programming
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Mathematical Programming Formulations, Constraint Programming 1. Special Purpose Algorithms 2. Constraint Programming Marco Chiarandini DM87 Scheduling,
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Mathematical Programming Formulations, Constraint Programming 1. Special Purpose Algorithms 2. Constraint Programming Marco Chiarandini DM87 Scheduling,
Global Constraints. Combinatorial Problem Solving (CPS) Enric Rodríguez-Carbonell (based on materials by Javier Larrosa) February 22, 2019
 Enric Rodríguez-Carbonell (based on materials by Javier Larrosa) February 22, 2019") Global Constraints Combinatorial Problem Solving (CPS) Enric Rodríguez-Carbonell (based on materials by Javier Larrosa) February 22, 2019 Global Constraints Global constraints are classes o constraints
Global Constraints Combinatorial Problem Solving (CPS) Enric Rodríguez-Carbonell (based on materials by Javier Larrosa) February 22, 2019 Global Constraints Global constraints are classes o constraints
Course Summary! What have we learned and what are we expected to know?
 Course Summary! What have we learned and what are we expected to know? Overview! Introduction Modelling in MiniZinc Finite Domain Constraint Solving Search Linear Programming and Network Flow Mixed Integer
Course Summary! What have we learned and what are we expected to know? Overview! Introduction Modelling in MiniZinc Finite Domain Constraint Solving Search Linear Programming and Network Flow Mixed Integer
Set 5: Constraint Satisfaction Problems Chapter 6 R&N
 Set 5: Constraint Satisfaction Problems Chapter 6 R&N ICS 271 Fall 2017 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples:
Set 5: Constraint Satisfaction Problems Chapter 6 R&N ICS 271 Fall 2017 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples:
CS 512, Spring 2017: Take-Home End-of-Term Examination
 CS 512, Spring 2017: Take-Home End-of-Term Examination Out: Tuesday, 9 May 2017, 12:00 noon Due: Wednesday, 10 May 2017, by 11:59 am Turn in your solutions electronically, as a single PDF file, by placing
CS 512, Spring 2017: Take-Home End-of-Term Examination Out: Tuesday, 9 May 2017, 12:00 noon Due: Wednesday, 10 May 2017, by 11:59 am Turn in your solutions electronically, as a single PDF file, by placing
! Greed. O(n log n) interval scheduling. ! Divide-and-conquer. O(n log n) FFT. ! Dynamic programming. O(n 2 ) edit distance.
 interval scheduling. ! Divide-and-conquer. O(n log n) FFT. ! Dynamic programming. O(n 2 ) edit distance.") Algorithm Design Patterns and Anti-Patterns 8. NP and Computational Intractability Algorithm design patterns. Ex.! Greed. O(n log n) interval scheduling.! Divide-and-conquer. O(n log n) FFT.! Dynamic programming.
Algorithm Design Patterns and Anti-Patterns 8. NP and Computational Intractability Algorithm design patterns. Ex.! Greed. O(n log n) interval scheduling.! Divide-and-conquer. O(n log n) FFT.! Dynamic programming.
! Greed. O(n log n) interval scheduling. ! Divide-and-conquer. O(n log n) FFT. ! Dynamic programming. O(n 2 ) edit distance.
 interval scheduling. ! Divide-and-conquer. O(n log n) FFT. ! Dynamic programming. O(n 2 ) edit distance.") Algorithm Design Patterns and Anti-Patterns Chapter 8 NP and Computational Intractability Algorithm design patterns. Ex.! Greed. O(n log n) interval scheduling.! Divide-and-conquer. O(n log n) FFT.! Dynamic
Algorithm Design Patterns and Anti-Patterns Chapter 8 NP and Computational Intractability Algorithm design patterns. Ex.! Greed. O(n log n) interval scheduling.! Divide-and-conquer. O(n log n) FFT.! Dynamic
Propagate the Right Thing: How Preferences Can Speed-Up Constraint Solving
 Propagate the Right Thing: How Preferences Can Speed-Up Constraint Solving Christian Bessiere Anais Fabre* LIRMM-CNRS (UMR 5506) 161, rue Ada F-34392 Montpellier Cedex 5 (bessiere,fabre}@lirmm.fr Ulrich
Propagate the Right Thing: How Preferences Can Speed-Up Constraint Solving Christian Bessiere Anais Fabre* LIRMM-CNRS (UMR 5506) 161, rue Ada F-34392 Montpellier Cedex 5 (bessiere,fabre}@lirmm.fr Ulrich
Hybrid Constraint Solvers
 Hybrid Constraint Solvers - An overview Why Hybrid Solvers CP and SAT: Lazy Clause Generation CP and LP: Reification of Linear Constraints Conclusions 9 November 2011 Pedro Barahona - EPCL - Hybrid Solvers
Hybrid Constraint Solvers - An overview Why Hybrid Solvers CP and SAT: Lazy Clause Generation CP and LP: Reification of Linear Constraints Conclusions 9 November 2011 Pedro Barahona - EPCL - Hybrid Solvers
What is Search For? CS 188: Artificial Intelligence. Constraint Satisfaction Problems
 CS 188: Artificial Intelligence Constraint Satisfaction Problems What is Search For? Assumptions about the world: a single agent, deterministic actions, fully observed state, discrete state space Planning:
CS 188: Artificial Intelligence Constraint Satisfaction Problems What is Search For? Assumptions about the world: a single agent, deterministic actions, fully observed state, discrete state space Planning:
Artificial Intelligence Constraint Satisfaction Problems
 Artificial Intelligence Constraint Satisfaction Problems Recall Search problems: Find the sequence of actions that leads to the goal. Sequence of actions means a path in the search space. Paths come with
Artificial Intelligence Constraint Satisfaction Problems Recall Search problems: Find the sequence of actions that leads to the goal. Sequence of actions means a path in the search space. Paths come with
Exercises Computational Complexity
 Exercises Computational Complexity March 22, 2017 Exercises marked with a are more difficult. 1 Chapter 7, P and NP Exercise 1. Suppose some pancakes are stacked on a surface such that no two pancakes
Exercises Computational Complexity March 22, 2017 Exercises marked with a are more difficult. 1 Chapter 7, P and NP Exercise 1. Suppose some pancakes are stacked on a surface such that no two pancakes
Chapter 8. NP and Computational Intractability. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 8 NP and Computational Intractability Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 Algorithm Design Patterns and Anti-Patterns Algorithm design patterns.
Chapter 8 NP and Computational Intractability Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 Algorithm Design Patterns and Anti-Patterns Algorithm design patterns.
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Frank C. Langbein F.C.Langbein@cs.cf.ac.uk Department of Computer Science Cardiff University 13th February 2001 Constraint Satisfaction Problems (CSPs) A CSP is a high
Constraint Satisfaction Problems Frank C. Langbein F.C.Langbein@cs.cf.ac.uk Department of Computer Science Cardiff University 13th February 2001 Constraint Satisfaction Problems (CSPs) A CSP is a high
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Berlin Chen Department of Computer Science & Information Engineering National Taiwan Normal University References: 1. S. Russell and P. Norvig. Artificial Intelligence:
Constraint Satisfaction Problems Berlin Chen Department of Computer Science & Information Engineering National Taiwan Normal University References: 1. S. Russell and P. Norvig. Artificial Intelligence:
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
CS W4701 Artificial Intelligence
 CS W4701 Artificial Intelligence Fall 2013 Chapter 6: Constraint Satisfaction Problems Jonathan Voris (based on slides by Sal Stolfo) Assignment 3 Go Encircling Game Ancient Chinese game Dates back At
CS W4701 Artificial Intelligence Fall 2013 Chapter 6: Constraint Satisfaction Problems Jonathan Voris (based on slides by Sal Stolfo) Assignment 3 Go Encircling Game Ancient Chinese game Dates back At
Combining forces to solve Combinatorial Problems, a preliminary approach
 Combining forces to solve Combinatorial Problems, a preliminary approach Mohamed Siala, Emmanuel Hebrard, and Christian Artigues Tarbes, France Mohamed SIALA April 2013 EDSYS Congress 1 / 19 Outline Context
Combining forces to solve Combinatorial Problems, a preliminary approach Mohamed Siala, Emmanuel Hebrard, and Christian Artigues Tarbes, France Mohamed SIALA April 2013 EDSYS Congress 1 / 19 Outline Context
The Extended Global Cardinality Constraint: An Empirical Survey
 The Extended Global Cardinality Constraint: An Empirical Survey Peter Nightingale a a School of Computer Science University of St Andrews St Andrews Fife KY16 9SX United Kingdom Abstract The Extended Global
The Extended Global Cardinality Constraint: An Empirical Survey Peter Nightingale a a School of Computer Science University of St Andrews St Andrews Fife KY16 9SX United Kingdom Abstract The Extended Global
Constraint Satisfaction
 Constraint Satisfaction Philipp Koehn 1 October 2015 Outline 1 Constraint satisfaction problems (CSP) examples Backtracking search for CSPs Problem structure and problem decomposition Local search for
Constraint Satisfaction Philipp Koehn 1 October 2015 Outline 1 Constraint satisfaction problems (CSP) examples Backtracking search for CSPs Problem structure and problem decomposition Local search for
UNIT 4 Branch and Bound
 UNIT 4 Branch and Bound General method: Branch and Bound is another method to systematically search a solution space. Just like backtracking, we will use bounding functions to avoid generating subtrees
UNIT 4 Branch and Bound General method: Branch and Bound is another method to systematically search a solution space. Just like backtracking, we will use bounding functions to avoid generating subtrees
CS 188: Artificial Intelligence Fall 2011
 Announcements Project 1: Search is due next week Written 1: Search and CSPs out soon Piazza: check it out if you haven t CS 188: Artificial Intelligence Fall 2011 Lecture 4: Constraint Satisfaction 9/6/2011
Announcements Project 1: Search is due next week Written 1: Search and CSPs out soon Piazza: check it out if you haven t CS 188: Artificial Intelligence Fall 2011 Lecture 4: Constraint Satisfaction 9/6/2011
Announcements. Homework 4. Project 3. Due tonight at 11:59pm. Due 3/8 at 4:00pm
 Announcements Homework 4 Due tonight at 11:59pm Project 3 Due 3/8 at 4:00pm CS 188: Artificial Intelligence Constraint Satisfaction Problems Instructor: Stuart Russell & Sergey Levine, University of California,
Announcements Homework 4 Due tonight at 11:59pm Project 3 Due 3/8 at 4:00pm CS 188: Artificial Intelligence Constraint Satisfaction Problems Instructor: Stuart Russell & Sergey Levine, University of California,
/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18
 601.433/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18 22.1 Introduction We spent the last two lectures proving that for certain problems, we can
601.433/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Approximation algorithms Date: 11/27/18 22.1 Introduction We spent the last two lectures proving that for certain problems, we can
ALGORITHMS EXAMINATION Department of Computer Science New York University December 17, 2007
 ALGORITHMS EXAMINATION Department of Computer Science New York University December 17, 2007 This examination is a three hour exam. All questions carry the same weight. Answer all of the following six questions.
ALGORITHMS EXAMINATION Department of Computer Science New York University December 17, 2007 This examination is a three hour exam. All questions carry the same weight. Answer all of the following six questions.
Disjoint, Partition and Intersection Constraints for Set and Multiset Variables
 Disjoint, Partition and Intersection Constraints for Set and Multiset Variables Christian Bessiere ½, Emmanuel Hebrard ¾, Brahim Hnich ¾, and Toby Walsh ¾ ¾ ½ LIRMM, Montpelier, France. Ö Ð ÖÑÑ Ö Cork
Disjoint, Partition and Intersection Constraints for Set and Multiset Variables Christian Bessiere ½, Emmanuel Hebrard ¾, Brahim Hnich ¾, and Toby Walsh ¾ ¾ ½ LIRMM, Montpelier, France. Ö Ð ÖÑÑ Ö Cork
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany, Course on Artificial Intelligence,
, University of Hildesheim, Germany, Course on Artificial Intelligence,") Course on Artificial Intelligence, winter term 2012/2013 0/35 Artificial Intelligence Artificial Intelligence 3. Constraint Satisfaction Problems Lars Schmidt-Thieme Information Systems and Machine Learning
Course on Artificial Intelligence, winter term 2012/2013 0/35 Artificial Intelligence Artificial Intelligence 3. Constraint Satisfaction Problems Lars Schmidt-Thieme Information Systems and Machine Learning
The Basic (Flat) Relational Model. Copyright 2011 Pearson Education, Inc. Publishing as Pearson Addison-Wesley
 Relational Model. Copyright 2011 Pearson Education, Inc. Publishing as Pearson Addison-Wesley") The Basic (Flat) Relational Model Copyright 2011 Pearson Education, Inc. Publishing as Pearson Addison-Wesley Chapter 3 Outline The Relational Data Model and Relational Database Constraints Relational
The Basic (Flat) Relational Model Copyright 2011 Pearson Education, Inc. Publishing as Pearson Addison-Wesley Chapter 3 Outline The Relational Data Model and Relational Database Constraints Relational
Lagrangian Relaxation in CP
 Lagrangian Relaxation in CP Willem-Jan van Hoeve CPAIOR 016 Master Class Overview 1. Motivation for using Lagrangian Relaxations in CP. Lagrangian-based domain filtering Example: Traveling Salesman Problem.
Lagrangian Relaxation in CP Willem-Jan van Hoeve CPAIOR 016 Master Class Overview 1. Motivation for using Lagrangian Relaxations in CP. Lagrangian-based domain filtering Example: Traveling Salesman Problem.
An Alldifferent Constraint Solver in SMT
 An Alldifferent Constraint Solver in SMT Milan Banković and Filip Marić Faculty of Mathematics, University of Belgrade (milan filip)@matf.bg.ac.rs May 16, 2010 Abstract The finite domain alldifferent constraint,
An Alldifferent Constraint Solver in SMT Milan Banković and Filip Marić Faculty of Mathematics, University of Belgrade (milan filip)@matf.bg.ac.rs May 16, 2010 Abstract The finite domain alldifferent constraint,
Set 5: Constraint Satisfaction Problems
 Set 5: Constraint Satisfaction Problems ICS 271 Fall 2014 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
Set 5: Constraint Satisfaction Problems ICS 271 Fall 2014 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
CS 188: Artificial Intelligence. What is Search For? Constraint Satisfaction Problems. Constraint Satisfaction Problems
 CS 188: Artificial Intelligence Constraint Satisfaction Problems Constraint Satisfaction Problems N variables domain D constraints x 1 x 2 Instructor: Marco Alvarez University of Rhode Island (These slides
CS 188: Artificial Intelligence Constraint Satisfaction Problems Constraint Satisfaction Problems N variables domain D constraints x 1 x 2 Instructor: Marco Alvarez University of Rhode Island (These slides
Set 5: Constraint Satisfaction Problems
 Set 5: Constraint Satisfaction Problems ICS 271 Fall 2012 Rina Dechter ICS-271:Notes 5: 1 Outline The constraint network model Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
Set 5: Constraint Satisfaction Problems ICS 271 Fall 2012 Rina Dechter ICS-271:Notes 5: 1 Outline The constraint network model Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Constraint Satisfaction Luke Zettlemoyer Multiple slides adapted from Dan Klein, Stuart Russell or Andrew Moore What is Search For? Models of the world: single agent, deterministic
CSE 473: Artificial Intelligence Constraint Satisfaction Luke Zettlemoyer Multiple slides adapted from Dan Klein, Stuart Russell or Andrew Moore What is Search For? Models of the world: single agent, deterministic
New Encodings of Pseudo-Boolean Constraints into CNF
 New Encodings of Pseudo-Boolean Constraints into CNF Olivier Bailleux, Yacine Boufkhad, Olivier Roussel olivier.bailleux@u-bourgogne.fr boufkhad@liafa.jussieu.fr roussel@cril.univ-artois.fr New Encodings
New Encodings of Pseudo-Boolean Constraints into CNF Olivier Bailleux, Yacine Boufkhad, Olivier Roussel olivier.bailleux@u-bourgogne.fr boufkhad@liafa.jussieu.fr roussel@cril.univ-artois.fr New Encodings
Class 2 Constraint Networks
 Class 2 Constraint Networks The constraint network model Inference. 1 Road Map (classes 2 3) The constraint network model Inference Search Hybrids of search and inference 2 Constraint Networks A Example:
Class 2 Constraint Networks The constraint network model Inference. 1 Road Map (classes 2 3) The constraint network model Inference Search Hybrids of search and inference 2 Constraint Networks A Example:
Dr. Amotz Bar-Noy s Compendium of Algorithms Problems. Problems, Hints, and Solutions
 Dr. Amotz Bar-Noy s Compendium of Algorithms Problems Problems, Hints, and Solutions Chapter 1 Searching and Sorting Problems 1 1.1 Array with One Missing 1.1.1 Problem Let A = A[1],..., A[n] be an array
Dr. Amotz Bar-Noy s Compendium of Algorithms Problems Problems, Hints, and Solutions Chapter 1 Searching and Sorting Problems 1 1.1 Array with One Missing 1.1.1 Problem Let A = A[1],..., A[n] be an array
Chapter 6 Constraint Satisfaction Problems
 Chapter 6 Constraint Satisfaction Problems CS5811 - Artificial Intelligence Nilufer Onder Department of Computer Science Michigan Technological University Outline CSP problem definition Backtracking search
Chapter 6 Constraint Satisfaction Problems CS5811 - Artificial Intelligence Nilufer Onder Department of Computer Science Michigan Technological University Outline CSP problem definition Backtracking search
Interaction Between Input and Output-Sensitive
 Interaction Between Input and Output-Sensitive Really? Mamadou M. Kanté Université Blaise Pascal - LIMOS, CNRS Enumeration Algorithms Using Structure, Lorentz Institute, August 26 th, 2015 1 Introduction
Interaction Between Input and Output-Sensitive Really? Mamadou M. Kanté Université Blaise Pascal - LIMOS, CNRS Enumeration Algorithms Using Structure, Lorentz Institute, August 26 th, 2015 1 Introduction
Set 5: Constraint Satisfaction Problems
 Set 5: Constraint Satisfaction Problems ICS 271 Fall 2013 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
Set 5: Constraint Satisfaction Problems ICS 271 Fall 2013 Kalev Kask ICS-271:Notes 5: 1 The constraint network model Outline Variables, domains, constraints, constraint graph, solutions Examples: graph-coloring,
Reductions. Linear Time Reductions. Desiderata. Reduction. Desiderata. Classify problems according to their computational requirements.
 Desiderata Reductions Desiderata. Classify problems according to their computational requirements. Frustrating news. Huge number of fundamental problems have defied classification for decades. Desiderata'.
Desiderata Reductions Desiderata. Classify problems according to their computational requirements. Frustrating news. Huge number of fundamental problems have defied classification for decades. Desiderata'.
The Complexity of Reasoning with Global Constraints
 Constraints DOI 10.1007/s10601-006-9007-3 The Complexity of Reasoning with Global Constraints Christian Bessiere Emmanuel Hebrard Brahim Hnich Toby Walsh Springer Science + Business Media, LLC 2006 Abstract
Constraints DOI 10.1007/s10601-006-9007-3 The Complexity of Reasoning with Global Constraints Christian Bessiere Emmanuel Hebrard Brahim Hnich Toby Walsh Springer Science + Business Media, LLC 2006 Abstract
Solving Problems by Searching: Constraint Satisfaction Problems
 Course 16 :198 :520 : Introduction To Artificial Intelligence Lecture 6 Solving Problems by Searching: Constraint Satisfaction Problems Abdeslam Boularias Wednesday, October 19, 2016 1 / 1 Outline We consider
Course 16 :198 :520 : Introduction To Artificial Intelligence Lecture 6 Solving Problems by Searching: Constraint Satisfaction Problems Abdeslam Boularias Wednesday, October 19, 2016 1 / 1 Outline We consider
PCP and Hardness of Approximation
 PCP and Hardness of Approximation January 30, 2009 Our goal herein is to define and prove basic concepts regarding hardness of approximation. We will state but obviously not prove a PCP theorem as a starting
PCP and Hardness of Approximation January 30, 2009 Our goal herein is to define and prove basic concepts regarding hardness of approximation. We will state but obviously not prove a PCP theorem as a starting
Unifying and extending hybrid tractable classes of CSPs
 Journal of Experimental & Theoretical Artificial Intelligence Vol. 00, No. 00, Month-Month 200x, 1 16 Unifying and extending hybrid tractable classes of CSPs Wady Naanaa Faculty of sciences, University
Journal of Experimental & Theoretical Artificial Intelligence Vol. 00, No. 00, Month-Month 200x, 1 16 Unifying and extending hybrid tractable classes of CSPs Wady Naanaa Faculty of sciences, University
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Constraint Satisfaction Problems Prof. Scott Niekum The University of Texas at Austin [These slides are based on those of Dan Klein and Pieter Abbeel for CS188 Intro to
CS 343: Artificial Intelligence Constraint Satisfaction Problems Prof. Scott Niekum The University of Texas at Austin [These slides are based on those of Dan Klein and Pieter Abbeel for CS188 Intro to
CONSTRAINT SATISFACTION
 9// CONSRAI ISFACION oday Reading AIMA Chapter 6 Goals Constraint satisfaction problems (CSPs) ypes of CSPs Inference Search + Inference 9// 8-queens problem How would you go about deciding where to put
9// CONSRAI ISFACION oday Reading AIMA Chapter 6 Goals Constraint satisfaction problems (CSPs) ypes of CSPs Inference Search + Inference 9// 8-queens problem How would you go about deciding where to put
Solving Quantified Constraint Satisfaction Problems
 Solving Quantified Constraint Satisfaction Problems Ian P. Gent Peter Nightingale Andrew Rowley School of Computer Science, University of St Andrews St Andrews, Fife, KY16 9SS, UK. {ipg,pn,agdr}@dcs.st-and.ac.uk
Solving Quantified Constraint Satisfaction Problems Ian P. Gent Peter Nightingale Andrew Rowley School of Computer Science, University of St Andrews St Andrews, Fife, KY16 9SS, UK. {ipg,pn,agdr}@dcs.st-and.ac.uk
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Chapter 5 Section 1 3 Constraint Satisfaction 1 Outline Constraint Satisfaction Problems (CSP) Backtracking search for CSPs Local search for CSPs Constraint Satisfaction
Constraint Satisfaction Problems Chapter 5 Section 1 3 Constraint Satisfaction 1 Outline Constraint Satisfaction Problems (CSP) Backtracking search for CSPs Local search for CSPs Constraint Satisfaction
NP Completeness. Andreas Klappenecker [partially based on slides by Jennifer Welch]
![NP Completeness. Andreas Klappenecker [partially based on slides by Jennifer Welch]](/thumbs/76/73396698.jpg "NP Completeness. Andreas Klappenecker [partially based on slides by Jennifer Welch]") NP Completeness Andreas Klappenecker [partially based on slides by Jennifer Welch] Overview We already know the following examples of NPC problems: SAT 3SAT We are going to show that the following are
NP Completeness Andreas Klappenecker [partially based on slides by Jennifer Welch] Overview We already know the following examples of NPC problems: SAT 3SAT We are going to show that the following are
Decomposable Constraints
 Decomposable Constraints Ian Gent 1, Kostas Stergiou 2, and Toby Walsh 3 1 University of St Andrews, St Andrews, Scotland. ipg@dcs.st-and.ac.uk 2 University of Strathclyde, Glasgow, Scotland. ks@cs.strath.ac.uk
Decomposable Constraints Ian Gent 1, Kostas Stergiou 2, and Toby Walsh 3 1 University of St Andrews, St Andrews, Scotland. ipg@dcs.st-and.ac.uk 2 University of Strathclyde, Glasgow, Scotland. ks@cs.strath.ac.uk
Announcements. Homework 1: Search. Project 1: Search. Midterm date and time has been set:
 Announcements Homework 1: Search Has been released! Due Monday, 2/1, at 11:59pm. On edx online, instant grading, submit as often as you like. Project 1: Search Has been released! Due Friday 2/5 at 5pm.
Announcements Homework 1: Search Has been released! Due Monday, 2/1, at 11:59pm. On edx online, instant grading, submit as often as you like. Project 1: Search Has been released! Due Friday 2/5 at 5pm.
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Chapter 5 Chapter 5 1 Outline CSP examples Backtracking search for CSPs Problem structure and problem decomposition Local search for CSPs Chapter 5 2 Constraint satisfaction
Constraint Satisfaction Problems Chapter 5 Chapter 5 1 Outline CSP examples Backtracking search for CSPs Problem structure and problem decomposition Local search for CSPs Chapter 5 2 Constraint satisfaction
Reading: Chapter 6 (3 rd ed.); Chapter 5 (2 nd ed.) For next week: Thursday: Chapter 8
; Chapter 5 (2 nd ed.) For next week: Thursday: Chapter 8") Constraint t Satisfaction Problems Reading: Chapter 6 (3 rd ed.); Chapter 5 (2 nd ed.) For next week: Tuesday: Chapter 7 Thursday: Chapter 8 Outline What is a CSP Backtracking for CSP Local search for
Constraint t Satisfaction Problems Reading: Chapter 6 (3 rd ed.); Chapter 5 (2 nd ed.) For next week: Tuesday: Chapter 7 Thursday: Chapter 8 Outline What is a CSP Backtracking for CSP Local search for
Computational problems. Lecture 2: Combinatorial search and optimisation problems. Computational problems. Examples. Example
 Lecture 2: Combinatorial search and optimisation problems Different types of computational problems Examples of computational problems Relationships between problems Computational properties of different
Lecture 2: Combinatorial search and optimisation problems Different types of computational problems Examples of computational problems Relationships between problems Computational properties of different
CSE 417 Branch & Bound (pt 4) Branch & Bound
 Branch & Bound") CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
Constraint Satisfaction Problems. Chapter 6
 Constraint Satisfaction Problems Chapter 6 Office hours Office hours for Assignment 1 (ASB9810 in CSIL): Sep 29th(Fri) 12:00 to 13:30 Oct 3rd(Tue) 11:30 to 13:00 Late homework policy You get four late
Constraint Satisfaction Problems Chapter 6 Office hours Office hours for Assignment 1 (ASB9810 in CSIL): Sep 29th(Fri) 12:00 to 13:30 Oct 3rd(Tue) 11:30 to 13:00 Late homework policy You get four late
Vertex Cover Approximations
 CS124 Lecture 20 Heuristics can be useful in practice, but sometimes we would like to have guarantees. Approximation algorithms give guarantees. It is worth keeping in mind that sometimes approximation
CS124 Lecture 20 Heuristics can be useful in practice, but sometimes we would like to have guarantees. Approximation algorithms give guarantees. It is worth keeping in mind that sometimes approximation
Example: Map-Coloring. Constraint Satisfaction Problems Western Australia. Example: Map-Coloring contd. Outline. Constraint graph
 Example: Map-Coloring Constraint Satisfaction Problems Western Northern erritory ueensland Chapter 5 South New South Wales asmania Variables, N,,, V, SA, Domains D i = {red,green,blue} Constraints: adjacent
Example: Map-Coloring Constraint Satisfaction Problems Western Northern erritory ueensland Chapter 5 South New South Wales asmania Variables, N,,, V, SA, Domains D i = {red,green,blue} Constraints: adjacent
Two Set-Constraints for Modeling and Efficiency
 Two Set-Constraints for Modeling and Efficiency Willem-Jan van Hoeve 1 and Ashish Sabharwal 2 1 Tepper School of Business, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213, U.S.A. vanhoeve@andrew.cmu.edu
Two Set-Constraints for Modeling and Efficiency Willem-Jan van Hoeve 1 and Ashish Sabharwal 2 1 Tepper School of Business, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213, U.S.A. vanhoeve@andrew.cmu.edu
Announcements. CS 188: Artificial Intelligence Fall 2010
 Announcements Project 1: Search is due Monday Looking for partners? After class or newsgroup Written 1: Search and CSPs out soon Newsgroup: check it out CS 188: Artificial Intelligence Fall 2010 Lecture
Announcements Project 1: Search is due Monday Looking for partners? After class or newsgroup Written 1: Search and CSPs out soon Newsgroup: check it out CS 188: Artificial Intelligence Fall 2010 Lecture
CONSTRAINT SATISFACTION
 CONSRAI ISFACION oday Reading AIMA Read Chapter 6.1-6.3, Skim 6.4-6.5 Goals Constraint satisfaction problems (CSPs) ypes of CSPs Inference (Search + Inference) 1 8-queens problem How would you go about
CONSRAI ISFACION oday Reading AIMA Read Chapter 6.1-6.3, Skim 6.4-6.5 Goals Constraint satisfaction problems (CSPs) ypes of CSPs Inference (Search + Inference) 1 8-queens problem How would you go about
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Search and Lookahead Bernhard Nebel, Julien Hué, and Stefan Wölfl Albert-Ludwigs-Universität Freiburg June 4/6, 2012 Nebel, Hué and Wölfl (Universität Freiburg) Constraint
Constraint Satisfaction Problems Search and Lookahead Bernhard Nebel, Julien Hué, and Stefan Wölfl Albert-Ludwigs-Universität Freiburg June 4/6, 2012 Nebel, Hué and Wölfl (Universität Freiburg) Constraint
CSP- and SAT-based Inference Techniques Applied to Gnomine
 CSP- and SAT-based Inference Techniques Applied to Gnomine Bachelor Thesis Faculty of Science, University of Basel Department of Computer Science Artificial Intelligence ai.cs.unibas.ch Examiner: Prof.
CSP- and SAT-based Inference Techniques Applied to Gnomine Bachelor Thesis Faculty of Science, University of Basel Department of Computer Science Artificial Intelligence ai.cs.unibas.ch Examiner: Prof.