Computer Vision Grouping and Segmentation. Grouping and Segmentation
|
|
|
- Allan Gilbert
- 5 years ago
- Views:
Transcription
1 Computer Vision Grouping and Segmentation Professor Hager Grouping and Segmentation G&S appear to be one of the early processes in human vision They are a way of *organizing* image content into semantically related groups In some applications, segmentation is the crucial step (e.g. some types of aerial image interpretation). We ll just touch on a few simple approaches of image grouping and segmentation We ll also present a couple of useful geometric grouping methods. 1


2 Grouping Grouping is the process of associating similar image features together Grouping Grouping is the process of associating similar image features together The Gestalt School: Proimity:tokens that are nearby tend to be grouped. Similarity:similar tokens tend to be grouped together. Common fate:tokens that have coherent motion tend to be grouped together. Common region:tokens that lie inside the same closed region tend to be grouped together. Parallelism:parallel curves or tokens tend to be grouped together. Closure:tokens or curves that tend to lead to closed curves tend to be grouped together. Symmetry:curves that lead to symmetric groups are grouped together. Continuity:tokens that lead to continuous (as in joining up nicely, rather than in the formal sense): curves tend to be grouped. Familiar Conguration:tokens that, when grouped, lead to a familiar object,tend to be grouped together 2
3 3
4 4
5 The Hough Transform How can we detect (group) etended line structures in images? y m b y = m + b 5
6 The Hough Transform How can we detect etended line structures in images? b y m b = - m + y Hough Transform Idea Each edge point in an image is a constraint on line parameters: constraint is a line each unique point adds another constraint Algorithm: Initialize a 2-D array of counters to zero. For each edge point (,y), increment any counter which contains a parameter point (b,m) satisfying b = - m + y Threshold counters Group edgels that belong to above threshold counters into contours Optional: Refit lines to get higher precision. 6
7 Hough Transform Variation Problem: m and b are, in principle, unbounded rewrite as sin(t) + cos(t) y = d For each discrete value of t from 0 to pi, increment counter with nominal d minimal distance from eact value coarse grid leads to grouping of distinct lines in post-fitting stage, re-hough at higher resolution Generalizations Any linear in parameters model: e.g a 2 + b y 2 = 1 can use the same algorithm For f(,a) = 0, choose any cell a c s.t. f(,a c ) < t for some threshold t. Limitations: the curse of dimensionality RANSAC: A More General Method The Hough transform has the nice feature that it provides a method for detecting geometric structure in clutter. The HT suffers from the curse of dimensionality. RANSAC (Random Sample Consensus) is a robust estimation technique that avoids (to some degree) the curse of dimensionality 7
8 RANSAC: General Idea How to find the line in this? RANSAC: General Idea Basic observation: if we were to choose the right pair of points 8
9 RANSAC: General Idea Basic observation: if we were to choose the right pair of points then it would be fairly obvious that many other points would agree Algorithm: For some number of tries N pick a pair of points fit a line to these points count the number of other pts that agree Return: line parameters with best agreement RANSAC: General Idea Algorithm: For some number of tries N pick a pair of points fit a line to these points count the number of other pts that agree Return: line parameters with best agreement Questions: 1) How many points 2) What do we mean agree 9
10 RANSAC # of points is N = log(1-p)/log(1-(1-ε) s ) assumes sampling is independent p is the probability one of the samples is all inliers s is sample size (2 for us) ε is percentage of outliers Consensus: Assume the points (inliners) are contaminated with Gaussian noise Distance to the line is a χ 2 m model where (in our case) m =1 Choose a probability threshold from χ 2 1 giving a distance t= 3.82 σ2 for α =.95 inliner if distance 2 < t 2 outlier if distance 2 >= t 2 Image Segmentation: A Brief Overview Segmentation criteria region group and counting 10
11 Segmentation: Definitions An affinity measure d(r 1,R 2 ) Æ or a homogeneity measure m(r) note possibly d(r 1,R 2 ) = m(r 1 ) M(R 2 ) An threshold τ (could operate on distance or homogeneity) A region definition (e.g. square tiles) A neighborhood definition 4 neighbors 0 8 neighbors 0 Choose an image criterion c Simple Thresholding Compute a binary image by b(i,j) = 1 if c(i(i,j)) > t; 0 otherwise Perform cleanup operations (image morphology) Perform grouping Compute connected components and/or statistics thereof 11

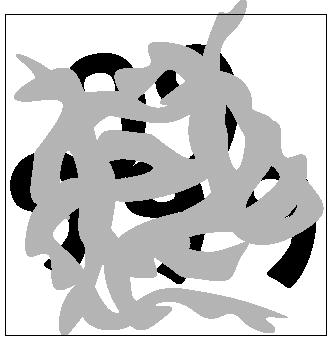
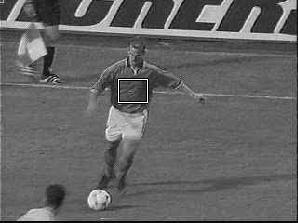
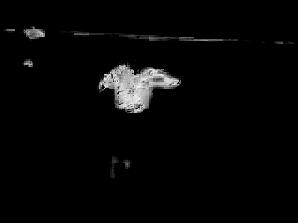
12 An Eample: Motion Detecting motion: Detecting motion: Thresholded Motion 50 Candidate areas for motion 12
13 A Closer Look Color: A Second Eample Color representation DRM [Klinker et al., 1990]: if P is Lambertian, has matte line and highlight line User selects matte piels in R Compute first and second order statistics of cluster T Decompose ellipsoid ( S, R, T) of variance of matte cluster Color similarity γ ( I(, y)) is defined by Mahalanobis distance S 1 R T ( I(, y) T) 13



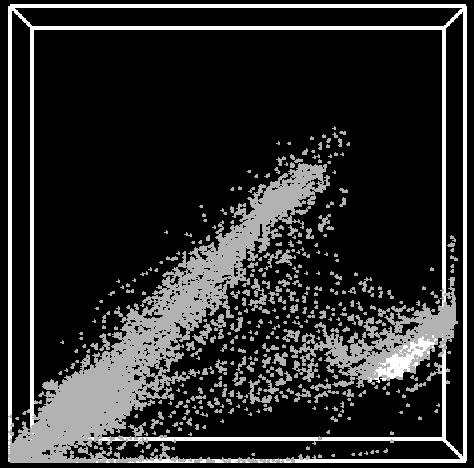
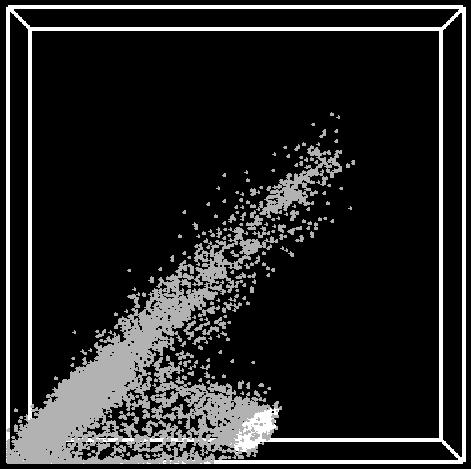
14 Homogeneous Color Region: Photometry Homogeneous Region: Photometry Sample PCA-fitted ellipsoid 14
15 Binary Image Processing After thresholding an image, we want to know something about the regions found... How many objects are in the image? Where are the distinct object components? Cleaning up a binary image? Connected Component Labeling 0 1 Goal: Label contiguous areas of a segmented image with unique labels neighbors vs. 8 neighbors 15
16 Connected Component Labeling Algorithm 1. Image is A. Let A = -A; 2. Start in upper left and work L to R, Top to Bottom, looking for an unprocessed (-1) piel. 3. When one is found, change its label to the net unused integer. Relabel all of that piel s unprocessed neighbors and their neighbors recursively. 4. When there are no more unprocessed neighbors, resume searching at step 2 -- but do so where you left off the last time. Morphological Operators summarized Let S t be the translation of a set of piels S by t. S t = { + t S } The dilation of a binary image A by a mask S is then A S = UA b b S The erosion of a binary image A by a mask S is A S = { + b A, b S} The closing of a binary image A by S is A S = (A S) S The opening of a binary image A by S is A S = (A S) S 16
17 The Poor Man s Closing Note that median (or more generally any order statistic) filtering is one way of achieving similar effects. On binary images this can be also implemented using the averaging filter Limitations of Thresholding A uniform threshold may not apply across the image It measures the uniformity of regions (in some sense), but doesn t eamine the inter-relationship between regions. Local disturbances can break up nominally consistent regions note hysteresis thresholding is one solution to this!! Later in the course we ll return to talk about methods around this 17
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Fitting. Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local
 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Outline. Advanced Digital Image Processing and Others. Importance of Segmentation (Cont.) Importance of Segmentation
 Importance of Segmentation") Advanced Digital Image Processing and Others Xiaojun Qi -- REU Site Program in CVIP (7 Summer) Outline Segmentation Strategies and Data Structures Algorithms Overview K-Means Algorithm Hidden Markov Model
Advanced Digital Image Processing and Others Xiaojun Qi -- REU Site Program in CVIP (7 Summer) Outline Segmentation Strategies and Data Structures Algorithms Overview K-Means Algorithm Hidden Markov Model
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Model Fitting, RANSAC. Jana Kosecka
 Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
6. Object Identification L AK S H M O U. E D U
 6. Object Identification L AK S H M AN @ O U. E D U Objects Information extracted from spatial grids often need to be associated with objects not just an individual pixel Group of pixels that form a real-world
6. Object Identification L AK S H M AN @ O U. E D U Objects Information extracted from spatial grids often need to be associated with objects not just an individual pixel Group of pixels that form a real-world
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
University of Florida CISE department Gator Engineering. Clustering Part 4
 Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Clustering Part 4 DBSCAN
 Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Estimate Geometric Transformation
 1 of 9 15/12/2009 11:05 Estimate Geometric Transformation Estimate geometric transformation from matching point pairs Library Geometric Transformations Description Use the Estimate Geometric Transformation
1 of 9 15/12/2009 11:05 Estimate Geometric Transformation Estimate geometric transformation from matching point pairs Library Geometric Transformations Description Use the Estimate Geometric Transformation
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Fitting a transformation: Feature-based alignment April 30 th, Yong Jae Lee UC Davis
 Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Spatial Outlier Detection
 Spatial Outlier Detection Chang-Tien Lu Department of Computer Science Northern Virginia Center Virginia Tech Joint work with Dechang Chen, Yufeng Kou, Jiang Zhao 1 Spatial Outlier A spatial data point
Spatial Outlier Detection Chang-Tien Lu Department of Computer Science Northern Virginia Center Virginia Tech Joint work with Dechang Chen, Yufeng Kou, Jiang Zhao 1 Spatial Outlier A spatial data point
Experiments with Edge Detection using One-dimensional Surface Fitting
 Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis
 Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis Xavier Le Faucheur a, Brani Vidakovic b and Allen Tannenbaum a a School of Electrical and Computer Engineering, b Department of Biomedical
Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis Xavier Le Faucheur a, Brani Vidakovic b and Allen Tannenbaum a a School of Electrical and Computer Engineering, b Department of Biomedical
University of Florida CISE department Gator Engineering. Clustering Part 5
 Clustering Part 5 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville SNN Approach to Clustering Ordinary distance measures have problems Euclidean
Clustering Part 5 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville SNN Approach to Clustering Ordinary distance measures have problems Euclidean
Preprocessing Short Lecture Notes cse352. Professor Anita Wasilewska
 Preprocessing Short Lecture Notes cse352 Professor Anita Wasilewska Data Preprocessing Why preprocess the data? Data cleaning Data integration and transformation Data reduction Discretization and concept
Preprocessing Short Lecture Notes cse352 Professor Anita Wasilewska Data Preprocessing Why preprocess the data? Data cleaning Data integration and transformation Data reduction Discretization and concept
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Nonparametric estimation of multiple structures with outliers
 Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka George Mason University, 44 University Dr. Fairfax, VA 223 USA Abstract. Common problem encountered in the analysis
Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka George Mason University, 44 University Dr. Fairfax, VA 223 USA Abstract. Common problem encountered in the analysis
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Prof. Noah Snavely CS Administrivia. A4 due on Friday (please sign up for demo slots)
") Robust fitting Prof. Noah Snavely CS111 http://www.cs.cornell.edu/courses/cs111 Administrivia A due on Friday (please sign up for demo slots) A5 will be out soon Prelim is coming up, Tuesday, / Roadmap
Robust fitting Prof. Noah Snavely CS111 http://www.cs.cornell.edu/courses/cs111 Administrivia A due on Friday (please sign up for demo slots) A5 will be out soon Prelim is coming up, Tuesday, / Roadmap
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm
 6.801/6.866 Machine Vision Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm Problem 1 Line Fitting through Segmentation (Matlab) a) Write a Matlab function to generate noisy line segment data with
6.801/6.866 Machine Vision Final Exam Assigned: 11/21/02 Due: 12/05/02 at 2:30pm Problem 1 Line Fitting through Segmentation (Matlab) a) Write a Matlab function to generate noisy line segment data with
Nonparametric estimation of multiple structures with outliers
 Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka Department of Computer Science, George Mason University, 44 University Dr. Fairfax, VA 223 USA {wzhang2,kosecka}@cs.gmu.edu
Nonparametric estimation of multiple structures with outliers Wei Zhang and Jana Kosecka Department of Computer Science, George Mason University, 44 University Dr. Fairfax, VA 223 USA {wzhang2,kosecka}@cs.gmu.edu
Sensor Tasking and Control
 Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Features. Places where intensities vary is some prescribed way in a small neighborhood How to quantify this variability
 Feature Detection Features Places where intensities vary is some prescribed way in a small neighborhood How to quantify this variability Derivatives direcitonal derivatives, magnitudes Scale and smoothing
Feature Detection Features Places where intensities vary is some prescribed way in a small neighborhood How to quantify this variability Derivatives direcitonal derivatives, magnitudes Scale and smoothing
Variational Methods II
 Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Introduction to Medical Imaging (5XSA0) Module 5
 Module 5") Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
A NEW HYBRID DIFFERENTIAL FILTER FOR MOTION DETECTION
 A NEW HYBRID DIFFERENTIAL FILTER FOR MOTION DETECTION Julien Richefeu, Antoine Manzanera Ecole Nationale Supérieure de Techniques Avancées Unité d Electronique et d Informatique 32, Boulevard Victor 75739
A NEW HYBRID DIFFERENTIAL FILTER FOR MOTION DETECTION Julien Richefeu, Antoine Manzanera Ecole Nationale Supérieure de Techniques Avancées Unité d Electronique et d Informatique 32, Boulevard Victor 75739
Experimental Data and Training
 Modeling and Control of Dynamic Systems Experimental Data and Training Mihkel Pajusalu Alo Peets Tartu, 2008 1 Overview Experimental data Designing input signal Preparing data for modeling Training Criterion
Modeling and Control of Dynamic Systems Experimental Data and Training Mihkel Pajusalu Alo Peets Tartu, 2008 1 Overview Experimental data Designing input signal Preparing data for modeling Training Criterion
Unsupervised Learning and Clustering
 Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Robust Methods. CS4243 Robust Methods 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Robust Methods CS4243 Robust Methods 1 Consider this data set Fitting a line to blue points give blue line. Outliers cause fitting error (red
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Robust Methods CS4243 Robust Methods 1 Consider this data set Fitting a line to blue points give blue line. Outliers cause fitting error (red
Image Analysis Image Segmentation (Basic Methods)
") Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 (4.2.07) Image Segmentation. Shahram Ebadollahi 4/4/ DIP ELEN E4830
 Image Segmentation. Shahram Ebadollahi 4/4/ DIP ELEN E4830") Lecture 9 4..07 Image Segmentation Shahram Ebadollahi 4/4/007 1 DIP ELEN E4830 Lecture Outline Skeletonizaiton GSAT Watershed Algorithm Image Segmentation Introduction Edge detection and linking Thresholding
Lecture 9 4..07 Image Segmentation Shahram Ebadollahi 4/4/007 1 DIP ELEN E4830 Lecture Outline Skeletonizaiton GSAT Watershed Algorithm Image Segmentation Introduction Edge detection and linking Thresholding
Image segmentation. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Homography estimation
 RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Technology Assignment: Limits at Infinity
 The goal of this technology assignment is to find the location of the horizontal asymptote for your model from Technology Assignment: Rational Model. You will produce a graph similar to the one below.
The goal of this technology assignment is to find the location of the horizontal asymptote for your model from Technology Assignment: Rational Model. You will produce a graph similar to the one below.
Mapping of Hierarchical Activation in the Visual Cortex Suman Chakravartula, Denise Jones, Guillaume Leseur CS229 Final Project Report. Autumn 2008.
 Mapping of Hierarchical Activation in the Visual Cortex Suman Chakravartula, Denise Jones, Guillaume Leseur CS229 Final Project Report. Autumn 2008. Introduction There is much that is unknown regarding
Mapping of Hierarchical Activation in the Visual Cortex Suman Chakravartula, Denise Jones, Guillaume Leseur CS229 Final Project Report. Autumn 2008. Introduction There is much that is unknown regarding
2D image segmentation based on spatial coherence
 2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
Data Mining. Part 2. Data Understanding and Preparation. 2.4 Data Transformation. Spring Instructor: Dr. Masoud Yaghini. Data Transformation
 Data Mining Part 2. Data Understanding and Preparation 2.4 Spring 2010 Instructor: Dr. Masoud Yaghini Outline Introduction Normalization Attribute Construction Aggregation Attribute Subset Selection Discretization
Data Mining Part 2. Data Understanding and Preparation 2.4 Spring 2010 Instructor: Dr. Masoud Yaghini Outline Introduction Normalization Attribute Construction Aggregation Attribute Subset Selection Discretization
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Targil 12 : Image Segmentation. Image segmentation. Why do we need it? Image segmentation
 Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Data Clustering Hierarchical Clustering, Density based clustering Grid based clustering
 Data Clustering Hierarchical Clustering, Density based clustering Grid based clustering Team 2 Prof. Anita Wasilewska CSE 634 Data Mining All Sources Used for the Presentation Olson CF. Parallel algorithms
Data Clustering Hierarchical Clustering, Density based clustering Grid based clustering Team 2 Prof. Anita Wasilewska CSE 634 Data Mining All Sources Used for the Presentation Olson CF. Parallel algorithms
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
ECLT 5810 Data Preprocessing. Prof. Wai Lam
 ECLT 5810 Data Preprocessing Prof. Wai Lam Why Data Preprocessing? Data in the real world is imperfect incomplete: lacking attribute values, lacking certain attributes of interest, or containing only aggregate
ECLT 5810 Data Preprocessing Prof. Wai Lam Why Data Preprocessing? Data in the real world is imperfect incomplete: lacking attribute values, lacking certain attributes of interest, or containing only aggregate
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition