CloudCompare CICESE Workshop 2015
|
|
|
- Lenard Reeves
- 6 years ago
- Views:
Transcription
1 CloudCompare CICESE Workshop 2015 Daniel Girardeau-Montaut
. Otherwise go to: www.cloudcompare.")
2 Workshop Interactive! Copy the sample files from the USB thumb drive: You can install CloudCompare with the Windows or Mac OS X installers ( binaries ). Otherwise go to:
3 Outline About the project Generalities Level 1: GUI, display, manual editing, etc. Advanced stuff Level 2: registration, distances, scalar fields, etc. And everything else

4 2003: PhD for EDF R&D EDF main French power utility Over employees worldwide 2 R&D (< 2%) 200 know about CloudCompare (< 0.2%) Sales >75 Bn (90 Bn $) Over 200 dams 58 nuclear reactors (19 plants)
 Main scanning activity: as-built")

5 EDF and Laser Scanning EDF = former owner of Mensi (now Trimble Laser Scanning) Main scanning activity: as-built documentation Scanning a single nuclear reactor building 2002: 3 days, 50 M. points 2014: 1.5 days, 50 Bn points (+ high res. photos)




6 EDF and Laser Scanning Other scanning activities: Building monitoring (dams, cooling towers, etc.) Landslide monitoring Hydrology Historical preservation (EDF Foundation)

7 PhD Change detection on 3D geometric data Application to Emergency Mapping Inspired by 9/11 post-attacks recovery efforts (see Mapping Ground Zero by J. Kern, Optech, Nov. 2001) TLS was used for: visualization, optimal crane placement, measurements, monitoring the subsidence of the wreckage pile, slurry wall monitoring, etc.
 acquired point clouds to quickly assess")

8 CloudCompare V Initial goals: to compare freshly (and big) acquired point clouds to quickly assess for changes either between a cloud and a mesh/cad or directly between two clouds ( the high density of TLS clouds is the key)
9 CloudCompare V2 2007: Industrialization of CloudCompare for internal use only! Rationale: idle reactor = 6 M / day acquired data can be checked on-site less missing or erroneous data no need to come back later checking the work of sub-contractors in charge of modeling became fast and accurate the algorithms are also used for clash detection during virtual simulation of tricky maintenance operations highly reduces the risk of issues or bad surprises during the actual maintenance operation Moreover EDF is not a software company

10 The open-source path 2009/2010: CloudCompare V2.1 Already a multi-purpose point cloud editing and processing software 2014: CloudCompare V2.6 Works on: Windows (XP / 7 / 8) Mac OS (thanks to Andy Maloney) Linux (thanks to Romain Janvier) Supports 3D mice (Windows only)
11 Open-source! Quickly evolving Goes where the users want goes there faster if the users are able to actively participate! Remains under strict supervision of the administrator ;-) Independent on any manufacturer Meant to survive: backed by strong companies and institutions (EDF, BRGM, CNRS, etc.)
 either by working on the project or by")
12 Open-source! Free but someone has to pay ;) either by working on the project or by paying someone to do so plugins are not necessarily public or free
13 Users Developers Too many ;) Academics: remote sensing geology archeology etc. Surveyors Forensic experts Architects MDs, dentists 3D designers Artist?! Barely enough few none none none none none none
14 Development cycle Specs core algorithm packaging (GUI, details, etc.) tests A simple message on the forum The fun part The less fun part Developer s hell User s hell ;) stability user feedback! 1st release time

15 Worldwide users > 1300 subscribers to the news letter
16 Generalities
 View toolbar Selected entity properties")
17 User interface overview Menus + main toolbars DB view 3D view(s) View toolbar Selected entity properties Console
18 Input/Output Mainly point clouds (ASC/PTS, LAS/LAZ, E57, PTX, FLS/FWS, DP, etc.) and triangular meshes (PLY, OBJ, STL, OFF, FBX) Dedicated format: BIN (for projects) Other formats: calibrated photos (Bundler.OUT), CAD (Autocad DXF drawings, Aveva.PDMS scripts), GIS shapefiles To come: RIEGL files more manufacturer formats?


")
")
19 Clouds display Blank cloud Normals (slow ) RGB EDL (fast )

20 PCV Global illumination / ambient occlusion

21 Scalar fields One value per point The value can be anything (distance, intensity, density, roughness, confidence, curvature, temperature, time, etc.) Values can be (dynamically) color-coded
22 Scalar fields Values can be mixed (+,-,/,x) transformed (cos, log, etc.) filtered (spatial smoothing, spatial gradient, etc.) imported or exported as a coordinate dimension merged with colors Statistics can be computed Clouds can be processed based on those values Segmentation (Filter by value) Subsampling Values can be exported to a CSV file ( Excel, Matlab, etc.)

23 Color scales Color Scale Editor : edit and create color scales Color scales can now be imported/exported as XML files When saving a «BIN» file, custom scales are automatically exported (and will be automatically imported when opening the file on another PC)

24 Manual editing Manual transformation Manual segmentation Cross Section Color / Normal editing Sub-sampling tool Scaling Cloning / Merging
25 Advanced
 + semi-automatic ball")
26 Registration Point-pair based alignment Automatic registration (ICP) + semi-automatic ball detection
27 Registration Some considerations What if my entities have some structural differences? Small local differences: ICP: Enable farthest points removal checkbox Different scales: Point-pairs based alignment: uncheck the Fixed scale checkbox ICP: check the Free scale parameters checkbox Major differences: Prefer the point-pairs based alignment tool!
 then apply the resulting transformation on the original mesh (Edit > Apply")
28 Registration Some (more) considerations What if one of the entity is a mesh? Almost the same workflow Sometimes you may have to sample points on the mesh first (Edit > Mesh > Sample points) then apply the resulting transformation on the original mesh (Edit > Apply Transformation) For the ICP process (fine registration) the mesh should always be the reference generally less holes and/or noise
29 Distances computation
30 Distances computation Distances are computed between each point of a compared cloud and its nearest point or triangle in a reference entity compared reference Process is not symmetrical
31 Distances computation Two (or three) cases 1. Comparison of two clouds 2. Comparison of a cloud and a mesh 3. Comparison of two meshes: the only way to do this in CloudCompare is to sample points on the compared mesh back to case 2
 as accurate as the true")

 The reference cloud extents must be at least as")
32 Cloud-cloud distances Main idea: if the reference cloud is dense enough, then the nearest neighbor distance will be (almost) as accurate as the true distance to the underlying surface Error is bounded Error depends on the reference cloud density only N.N. distances in a random Poisson process Consequences: Use the denser cloud as reference (if possible) The reference cloud extents must be at least as large as the compared ones (avoid non overlapping areas!)




33 Poor or irregular density? Local meshing strategy measured distance real distance Local modeling: 2 to 5 times slower
34 Cloud-cloud distances Select both entities Tools > Distances > Cloud/Cloud dist.


35 Robust C2C distances with M3C2 Lague, D., Brodu, N. and Leroux, J., Accurate 3D comparison of complex topography with terrestrial laser scanner : application to the Rangitikei canyon (N-Z), 2013, ISPRS journal of Photogrammmetry and Remote Sensing
36 Cloud-mesh distances Tools > Distances > Cloud/Mesh dist. In this mode, the distance is computed between each point of the compared cloud and its nearest triangle in the reference mesh If the mesh quality is good, this is generally faster and more accurate but getting a clean mesh can be hard! Regarding the output, the only difference with the cloud/cloud case is that the distances are signed (we use the triangle normal)

37 Cloud-mesh distances

38 Classification with CANUPO Brodu, N. and Lague, D., 3D Terrestrial LiDAR data classification of complex natural scenes using a multi-scale dimensionality criterion : applications in geomorphology, ISPRS journal of Photogrammmetry and Remote Sensing, 2012
39 Cleaning Various methods to remove isolated parts, outliers, nonoverlapping areas, etc. : Manual editing Remove isolated parts with the Label Connected Components tool Remove isolated points / noise with: Tools > Clean > Noise filter Other option: scalar-field based segmentation


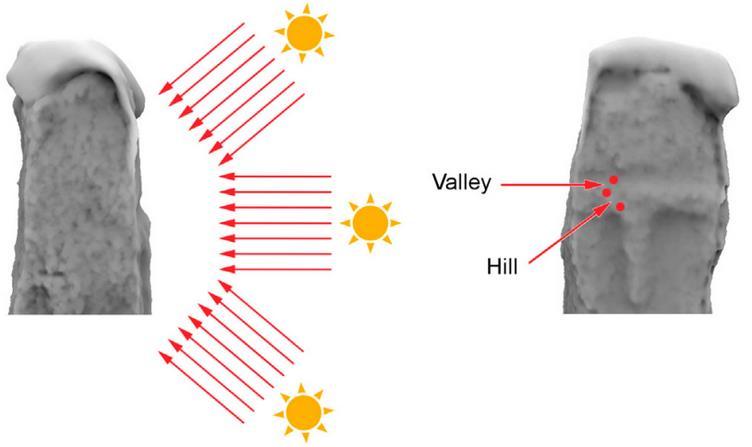
40 Contour/profile extraction

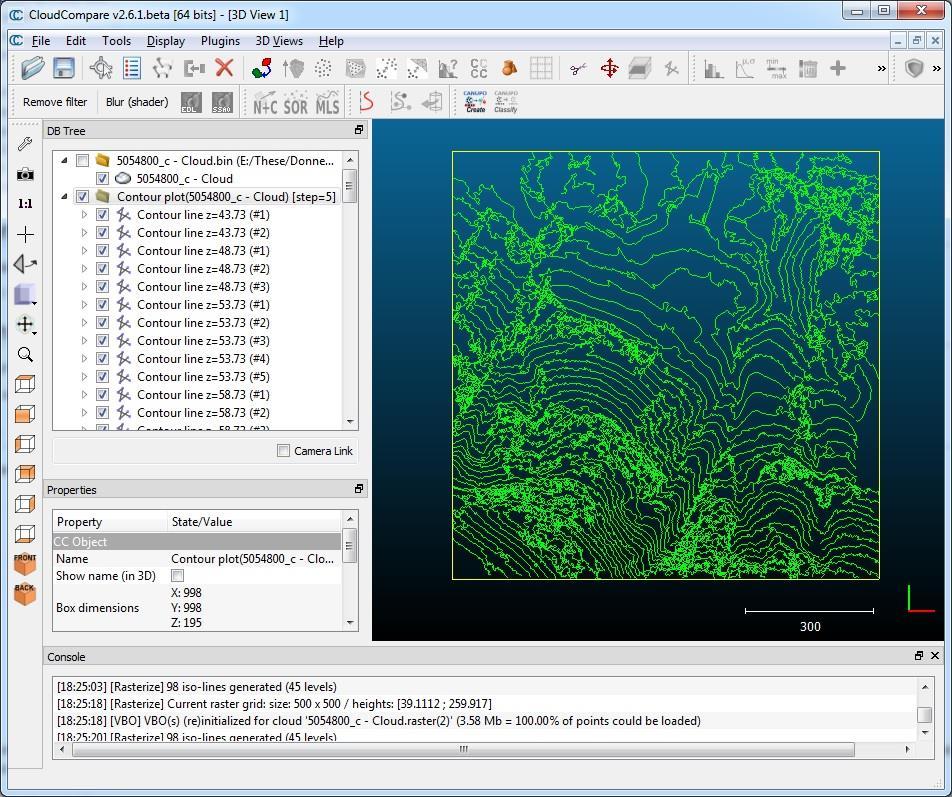
41 Rasterize & contour plots
42 Other

43 Working with SfM data Support for Bundler files Handling of calibrated pictures and camera sensors
44 Sensors TLS ( GBL ) Sensors Camera sensors
45 Meshing Meshing tool (to cope with holes mainly) Delaunay 2D for 2D½ clouds Or the qpoissonrecon plugin for closed shapes Warning: CloudCompare is not a meshing tool (remember that the initial aim was to avoid meshes ;-) It only provides simple approaches for convenience Consider using true meshing tools (Meshlab, VR mesh, Geomagic, etc.) If you need accurate meshes
46 Presenting & sharing results Analysis Histogram Local Statistical Testing tool Export to Matlab /Excel /etc. (ASCII ~ CSV format) Display create labels, save viewports, etc. Save the whole project in a BIN file Share ccviewer (lightweight, for load & display only)
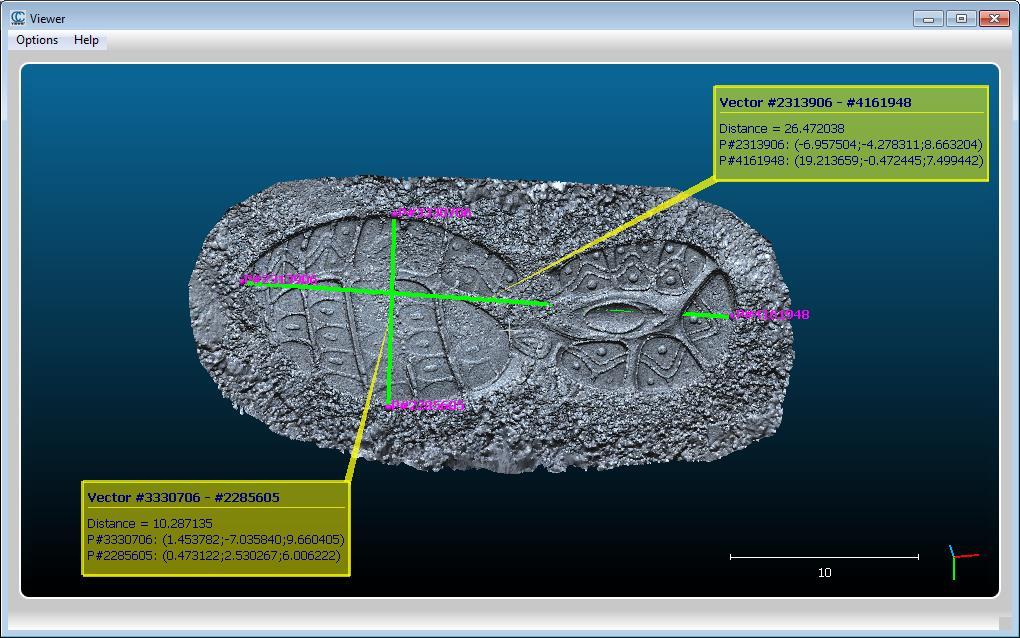
47 ccviewer
48 Misc. Plane and sphere fitting Unroll feature (on a cylinder or a cone) Plugins Command line mode Wiki (
49 Next

50 In preparation Near future: Oculus Rift plugin Animation Volume calculation TODO list:

 ISPRS International")
51 Next workshops 2nd international conference of the IAFSM (San Diego, Nov. 2015) ISPRS International Conference (Prague, Jul. 2016)

52 Thanks for your attention!
GUIDE TO POST-PROCESSING OF THE POINT CLOUD
 GUIDE TO POST-PROCESSING OF THE POINT CLOUD Contents Contents 3 Reconstructing the point cloud with MeshLab 16 Reconstructing the point cloud with CloudCompare 2 Reconstructing the point cloud with MeshLab
GUIDE TO POST-PROCESSING OF THE POINT CLOUD Contents Contents 3 Reconstructing the point cloud with MeshLab 16 Reconstructing the point cloud with CloudCompare 2 Reconstructing the point cloud with MeshLab
Watershed Sciences 4930 & 6920 ADVANCED GIS
 Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL
 JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL") Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
LASERDATA LIS build your own bundle! LIS Pro 3D LIS 3.0 NEW! BETA AVAILABLE! LIS Road Modeller. LIS Orientation. LIS Geology.
 LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
COMPONENTS. The web interface includes user administration tools, which allow companies to efficiently distribute data to internal or external users.
 COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE. Matthew P. Tait
 POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013
 Lezione 14: 9 maggio 2013") Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively
Grafica 3D per i beni culturali: Dense stereo matching, alternative e processing finale del modello (+ extra) Lezione 14: 9 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively
FARO Scanning Plugin
 FARO Scanning Plugin for Geomagic Studio 6 service release 4, Geomagic Qualify 6 service release 2, and Geomagic Qualify 7 Document version B Copyright 2004, Raindrop Geomagic, Inc. The FARO scanner is
FARO Scanning Plugin for Geomagic Studio 6 service release 4, Geomagic Qualify 6 service release 2, and Geomagic Qualify 7 Document version B Copyright 2004, Raindrop Geomagic, Inc. The FARO scanner is
Grafica 3D per i beni culturali: Multiview stereo matching, making the model. Lezione 16: 5 maggio 2013
 Grafica 3D per i beni culturali: Multiview stereo matching, making the model Lezione 16: 5 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability
Grafica 3D per i beni culturali: Multiview stereo matching, making the model Lezione 16: 5 maggio 2013 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Point Cloud - Polygon Mesh. Wannes Van Isacker - Industrial Design 15
 Point Cloud - Polygon Mesh Wannes Van Isacker - Industrial Design 15 3D-SCANNING About 3D Scanning To get started with 3D scanning you first have to understand a little how the scanner works. The scanner
Point Cloud - Polygon Mesh Wannes Van Isacker - Industrial Design 15 3D-SCANNING About 3D Scanning To get started with 3D scanning you first have to understand a little how the scanner works. The scanner
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation
 3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation Rodney Chaffee Head of Sales, FARO Asia Pacific 3D Laser Scaning Market 2017 2.3 Billion $ 2012 1.3 Billion $ CAGR : > 12% Source:
3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation Rodney Chaffee Head of Sales, FARO Asia Pacific 3D Laser Scaning Market 2017 2.3 Billion $ 2012 1.3 Billion $ CAGR : > 12% Source:
T-SCAN 3 3D DIGITIZING
 T-SCAN 3 3D DIGITIZING 2 T-SCAN 3: THE HANDHELD LASER SCANNER Launching the innovative concept of an intuitive-to-use high-precision laser scanner a few years ago, Steinbichler Optotechnik, as the first
T-SCAN 3 3D DIGITIZING 2 T-SCAN 3: THE HANDHELD LASER SCANNER Launching the innovative concept of an intuitive-to-use high-precision laser scanner a few years ago, Steinbichler Optotechnik, as the first
Leica Cyclone 5.4 Technical Specifications
 Leica Cyclone 5.4 Technical Specifications HDS Scanner control and operation Scan Scan Scan Register Model Survey Viewer Acquire and display image Acquire image at specified resolution (high, medium, low)
Leica Cyclone 5.4 Technical Specifications HDS Scanner control and operation Scan Scan Scan Register Model Survey Viewer Acquire and display image Acquire image at specified resolution (high, medium, low)
The Processing of Laser Scan Data for the Analysis of Historic Structures in Ireland
 The 7th International Symposium on Virtual Reality, Archaeology and Cultural Heritage VAST (2006) M. Ioannides, D. Arnold, F. Niccolucci, K. Mania (Editors) The Processing of Laser Scan Data for the Analysis
The 7th International Symposium on Virtual Reality, Archaeology and Cultural Heritage VAST (2006) M. Ioannides, D. Arnold, F. Niccolucci, K. Mania (Editors) The Processing of Laser Scan Data for the Analysis
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
STUDIO 13 THE BEST JUST GOT MUCH BETTER WHAT S NEW TO ARTEC
 WHAT S NEW TO ARTEC STUDIO 13 THE BEST JUST GOT MUCH BETTER Each year, Artec 3D overhauls the performance and features of the Artec Studio software, developing new and exciting tools, as well as streamlining
WHAT S NEW TO ARTEC STUDIO 13 THE BEST JUST GOT MUCH BETTER Each year, Artec 3D overhauls the performance and features of the Artec Studio software, developing new and exciting tools, as well as streamlining
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Bentley Descartes and what s new in Descartes V8i (SELECTseries 3) What is Bentley Descartes? 2011 Bentley Systems, Incorporated
 What is Bentley Descartes? 2011 Bentley Systems, Incorporated") Bentley Descartes and what s new in Descartes V8i (SELECTseries 3) Tom Stogdill Bentley Systems, Inc. What is Bentley Descartes? Image Processing Raster Geo-Referencing Advanced raster transformation (warping,
Bentley Descartes and what s new in Descartes V8i (SELECTseries 3) Tom Stogdill Bentley Systems, Inc. What is Bentley Descartes? Image Processing Raster Geo-Referencing Advanced raster transformation (warping,
AUTOMATIC 3D RECONSTRUCTION OF BUILDINGS ROOF TOPS IN DENSELY URBANIZED AREAS
 National Technical University Of Athens School of Rural and Surveying Engineering AUTOMATIC 3D RECONSTRUCTION OF BUILDINGS ROOF TOPS IN DENSELY URBANIZED AREAS Maria Gkeli, Surveying Engineer, PhD student
National Technical University Of Athens School of Rural and Surveying Engineering AUTOMATIC 3D RECONSTRUCTION OF BUILDINGS ROOF TOPS IN DENSELY URBANIZED AREAS Maria Gkeli, Surveying Engineer, PhD student
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
The application of a SMARTTECH 3D scanner for the production of additional parts / industry: motorcycle accessories
 The application of a SMARTTECH 3D scanner for the production of additional parts / industry: motorcycle accessories Enduro-Tech is a company that manufactures accessories for enduro motorcycles. It was
The application of a SMARTTECH 3D scanner for the production of additional parts / industry: motorcycle accessories Enduro-Tech is a company that manufactures accessories for enduro motorcycles. It was
Release Notes. Release Date: March, 2018
 Release Notes Release Date: March, 2018 Software: Geomagic Design X Version 2016.2.1 TABLE OF CONTENTS 1 INTRODUCTION 1 COPYRIGHT 1 2 INSTALLATION 2 SYSTEM REQUIREMENTS 2 DOWNLOAD AND INSTALL SOFTWARE
Release Notes Release Date: March, 2018 Software: Geomagic Design X Version 2016.2.1 TABLE OF CONTENTS 1 INTRODUCTION 1 COPYRIGHT 1 2 INSTALLATION 2 SYSTEM REQUIREMENTS 2 DOWNLOAD AND INSTALL SOFTWARE
3-dimensional technology. January d Software for Maya archaeology research GEOMAGIC. Author: Cindy Contreras / Editor: Nicholas Hellmuth
 3-dimensional technology January 2010 3d Software for Maya archaeology research GEOMAGIC Author: Cindy Contreras / Editor: Nicholas Hellmuth TABLE OF CONTENTS Introduction 1 Processing Scans in Geomagic
3-dimensional technology January 2010 3d Software for Maya archaeology research GEOMAGIC Author: Cindy Contreras / Editor: Nicholas Hellmuth TABLE OF CONTENTS Introduction 1 Processing Scans in Geomagic
OpenSCAD. About OpenSCAD. Open SCAD is focused on the CAD (Computer Aided Design) aspects of creating 3D
 aspects of creating 3D") OpenSCAD OpenSCAD is a free software for creating solid 3D CAD objects. It is available for Linux/UNIX, MS Windows and Mac OS X. About OpenSCAD Open SCAD is focused on the CAD (Computer Aided Design) aspects
OpenSCAD OpenSCAD is a free software for creating solid 3D CAD objects. It is available for Linux/UNIX, MS Windows and Mac OS X. About OpenSCAD Open SCAD is focused on the CAD (Computer Aided Design) aspects
PLANE-BASED COARSE REGISTRATION OF 3D POINT CLOUDS WITH 4D MODELS
 PLANE-BASED COARSE REGISTRATION OF 3D POINT CLOUDS WITH 4D MODELS Frédéric Bosché School of the Built Environment, Heriot-Watt University, Edinburgh, Scotland bosche@vision.ee.ethz.ch ABSTRACT: The accurate
PLANE-BASED COARSE REGISTRATION OF 3D POINT CLOUDS WITH 4D MODELS Frédéric Bosché School of the Built Environment, Heriot-Watt University, Edinburgh, Scotland bosche@vision.ee.ethz.ch ABSTRACT: The accurate
3D MESH RECONSTRUCTION USING PHOTOGRAMMETRY EX. 1 VISUAL SFM + MESHLAB. Afonso Maria C. F. A. Gonçalves
 3D MESH RECONSTRUCTION USING PHOTOGRAMMETRY EX. 1 VISUAL SFM + MESHLAB Afonso Maria C. F. A. Gonçalves 20130528 ADVANCED STUDIES PROGRAM IN COMPUTATION APPLIED TO ARCHITECTURE, URBAN PLANNING AND DESIGN
3D MESH RECONSTRUCTION USING PHOTOGRAMMETRY EX. 1 VISUAL SFM + MESHLAB Afonso Maria C. F. A. Gonçalves 20130528 ADVANCED STUDIES PROGRAM IN COMPUTATION APPLIED TO ARCHITECTURE, URBAN PLANNING AND DESIGN
Trimble RealWorks. What s new in version 9.0
 Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Virtually Real: Terrestrial Laser Scanning
 Check. They re Chartered. Geomatics Client Guides Virtually Real: Terrestrial Laser Scanning Understanding an evolving survey technology Summary This guide gives you an overview of the technique, some
Check. They re Chartered. Geomatics Client Guides Virtually Real: Terrestrial Laser Scanning Understanding an evolving survey technology Summary This guide gives you an overview of the technique, some
COMET 5 3D DIGITIZING
 COMET 5 3D DIGITIZING 2 COMET 5: THE 3D SENSOR REFERENCE 3D digitizing in revolutionary shape: With the COMET5 sensor, Steinbichler Optotechnik is presenting a system perfectly fitting the steadily growing
COMET 5 3D DIGITIZING 2 COMET 5: THE 3D SENSOR REFERENCE 3D digitizing in revolutionary shape: With the COMET5 sensor, Steinbichler Optotechnik is presenting a system perfectly fitting the steadily growing
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Documentation for the analysis of the ground-based Alvord Basin LiDAR dataset
 Documentation for the analysis of the ground-based Alvord Basin LiDAR dataset Introduction David E. Haddad david.e.haddad@asu.edu July 2008 This report presents the procedures carried out, the results
Documentation for the analysis of the ground-based Alvord Basin LiDAR dataset Introduction David E. Haddad david.e.haddad@asu.edu July 2008 This report presents the procedures carried out, the results
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
FARO As-Built for AutoCAD Software Versatile Reality to CAD Solutions
 FARO As-Built for AutoCAD Software Versatile Reality to CAD Solutions FARO As-Built for Autodesk Revit Creating Efficiencies in Scan Data Extraction for BIM FARO As-Built for AutoCAD Software TM Versatile
FARO As-Built for AutoCAD Software Versatile Reality to CAD Solutions FARO As-Built for Autodesk Revit Creating Efficiencies in Scan Data Extraction for BIM FARO As-Built for AutoCAD Software TM Versatile
Integrated Projects. Madonna di Pietranico Pompeii insula V1 V I S UA L COMPUTING L A B I ST I - C N R
 Integrated Projects Madonna di Pietranico Pompeii insula V1 V I S UA L COMPUTING L A B I ST I - C N R La Madonna di Pietranico Pietranico s Madonna Terracotta statue, destroyed by an earthquake. We used
Integrated Projects Madonna di Pietranico Pompeii insula V1 V I S UA L COMPUTING L A B I ST I - C N R La Madonna di Pietranico Pietranico s Madonna Terracotta statue, destroyed by an earthquake. We used
2010 LiDAR Project. GIS User Group Meeting June 30, 2010
 2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
Rapid generation of 3D GIS content from reality capture data sources. Keir Keightley, HDR
 Rapid generation of 3D GIS content from reality capture data sources Keir Keightley, HDR Purpose Why do we want 3D GIS content? A picture is worth a thousand words, and more, if you can navigate it in
Rapid generation of 3D GIS content from reality capture data sources Keir Keightley, HDR Purpose Why do we want 3D GIS content? A picture is worth a thousand words, and more, if you can navigate it in
OPEN. INTELLIGENT. Laser Scanning Software Solutions
 OPEN. INTELLIGENT. Laser Scanning Software Solutions www.lfm-software.com The Future of Laser Scanning Safe and efficient operation of complex engineering assets, and the efficient management of their
OPEN. INTELLIGENT. Laser Scanning Software Solutions www.lfm-software.com The Future of Laser Scanning Safe and efficient operation of complex engineering assets, and the efficient management of their
(1)C-(CH) BU, Printed in Japan
C-(CH) BU, Printed in Japan") Export permission by the Japanese government may be required for exporting our products according to the Foreign Exchange and Foreign Trade Law. Please consult our sales office near you before you export
Export permission by the Japanese government may be required for exporting our products according to the Foreign Exchange and Foreign Trade Law. Please consult our sales office near you before you export
Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex E.
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex E.
COSCH Training School Lab session, Day 2
 COSCH Training School Lab session, Day 2 Basic steps to follow during the Lab session on Correspondence-less fusion of colour images and 3D surfaces Preparing the 2D input data: At this step, you need
COSCH Training School Lab session, Day 2 Basic steps to follow during the Lab session on Correspondence-less fusion of colour images and 3D surfaces Preparing the 2D input data: At this step, you need
Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach
 Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach Dipl.-Ing. (FH) Günther Lang, CFDnetwork Engineering Dipl.-Ing. Burkhard Lewerich, CFDnetwork
Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach Dipl.-Ing. (FH) Günther Lang, CFDnetwork Engineering Dipl.-Ing. Burkhard Lewerich, CFDnetwork
3GSM GmbH. Plüddemanngasse 77 A-8010 Graz, Austria Tel Fax:
 White Paper Graz, April 2014 3GSM GmbH Plüddemanngasse 77 A-8010 Graz, Austria Tel. +43-316-464744 Fax: +43-316-464744-11 office@3gsm.at www.3gsm.at Measurement and assessment of rock and terrain surfaces
White Paper Graz, April 2014 3GSM GmbH Plüddemanngasse 77 A-8010 Graz, Austria Tel. +43-316-464744 Fax: +43-316-464744-11 office@3gsm.at www.3gsm.at Measurement and assessment of rock and terrain surfaces
Landslides Detection and Monitoring along Dieppe Coastal Cliffs Ability of boat-based Mobile Laser Scanning
 Vertical Geology Conference 2014, University of Lausanne Landslides Detection and Monitoring along Dieppe Coastal Cliffs Ability of boat-based Mobile Laser Scanning Clément Michoud 1, Dario Carrea 1, S.
Vertical Geology Conference 2014, University of Lausanne Landslides Detection and Monitoring along Dieppe Coastal Cliffs Ability of boat-based Mobile Laser Scanning Clément Michoud 1, Dario Carrea 1, S.
BE INSPIRED.
 BE INSPIRED www.scaninabox.com Last update October 2017 PROFESSIONALISM, OUR CORE Accurately manufactured in every detail, Scan in a Box FX offers high quality 3D Scans. The Made in Italy design has been
BE INSPIRED www.scaninabox.com Last update October 2017 PROFESSIONALISM, OUR CORE Accurately manufactured in every detail, Scan in a Box FX offers high quality 3D Scans. The Made in Italy design has been
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
What s New in ecognition 9.0
 What s New in ecognition 9.0 Dr. Waldemar Krebs tranforming data into GIS ready information Trends in Earth Observation Increasing need for detailed, up-to-date information as a basis for planning and
What s New in ecognition 9.0 Dr. Waldemar Krebs tranforming data into GIS ready information Trends in Earth Observation Increasing need for detailed, up-to-date information as a basis for planning and
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL LASER SCANNING
 JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
DRAWING AND LANDSCAPE SIMULATION FOR JAPANESE GARDEN BY USING TERRESTRIAL LASER SCANNER
 DRAWING AND LANDSCAPE SIMULATION FOR JAPANESE GARDEN BY USING TERRESTRIAL LASER SCANNER R. Kumazaki a, *, Y. Kunii a a ITU, Department of Landscape Architecture Science, Tokyo University of Aguriculture,
DRAWING AND LANDSCAPE SIMULATION FOR JAPANESE GARDEN BY USING TERRESTRIAL LASER SCANNER R. Kumazaki a, *, Y. Kunii a a ITU, Department of Landscape Architecture Science, Tokyo University of Aguriculture,
User Manual Of Einscan-S Catalog
 User Manual Of Einscan-S Catalog 1 Software installation... 2 1.1 Software installation... 2 1.2 Software Uninstall...8 2 Software Introduction...8 2.1 First Scan... 8 2.2 Advanced options... 10 3 Calibration...12
User Manual Of Einscan-S Catalog 1 Software installation... 2 1.1 Software installation... 2 1.2 Software Uninstall...8 2 Software Introduction...8 2.1 First Scan... 8 2.2 Advanced options... 10 3 Calibration...12
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Data analysis with ParaView CSMP Workshop 2009 Gillian Gruen
 Data analysis with ParaView 3.4.0 CSMP Workshop 2009 Gillian Gruen How to...... display a data set ( Contour, Glyph, Clip, Slice) be efficient in displaying similar data sets ( work with Lookmarks )...
Data analysis with ParaView 3.4.0 CSMP Workshop 2009 Gillian Gruen How to...... display a data set ( Contour, Glyph, Clip, Slice) be efficient in displaying similar data sets ( work with Lookmarks )...
Bumblebee2 Stereo Vision Camera
 Bumblebee2 Stereo Vision Camera Description We use the Point Grey Bumblebee2 Stereo Vision Camera in this lab section. This stereo camera can capture 648 x 488 video at 48 FPS. 1) Microlenses 2) Status
Bumblebee2 Stereo Vision Camera Description We use the Point Grey Bumblebee2 Stereo Vision Camera in this lab section. This stereo camera can capture 648 x 488 video at 48 FPS. 1) Microlenses 2) Status
Paolo Cignoni ISTI CNR
 A mesh processing library Paolo Cignoni ISTI CNR Intro Intro Capabilities Design/Structure Examples What A C++ template based library Include only, no compilation hassle Research Driven Library The most
A mesh processing library Paolo Cignoni ISTI CNR Intro Intro Capabilities Design/Structure Examples What A C++ template based library Include only, no compilation hassle Research Driven Library The most
LinkMotion and CorelDraw 9, 10, 11, 12, X3, X4, X5, X6, X7 and X8:
 LinkMotion and CorelDraw 9, 10, 11, 12, X3, X4, X5, X6, X7 and X8: After you install LinkMotion software and set up all settings launch CorelDraw software. Important notes: Solustan s LinkMotion driver
LinkMotion and CorelDraw 9, 10, 11, 12, X3, X4, X5, X6, X7 and X8: After you install LinkMotion software and set up all settings launch CorelDraw software. Important notes: Solustan s LinkMotion driver
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller
 Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller School of Civil Engineering & Geosciences Newcastle University Overview Laser scanning overview Research applications geometric
Terrestrial Laser Scanning: Applications in Civil Engineering Pauline Miller School of Civil Engineering & Geosciences Newcastle University Overview Laser scanning overview Research applications geometric
Introduction to LiDAR
 Introduction to LiDAR Our goals here are to introduce you to LiDAR data. LiDAR data is becoming common, provides ground, building, and vegetation heights at high accuracy and detail, and is available statewide.
Introduction to LiDAR Our goals here are to introduce you to LiDAR data. LiDAR data is becoming common, provides ground, building, and vegetation heights at high accuracy and detail, and is available statewide.
Surface Analysis with 3D Analyst
 2013 Esri International User Conference July 8 12, 2013 San Diego, California Technical Workshop Surface Analysis with 3D Analyst Khalid H. Duri Esri UC2013. Technical Workshop. Why use 3D GIS? Because
2013 Esri International User Conference July 8 12, 2013 San Diego, California Technical Workshop Surface Analysis with 3D Analyst Khalid H. Duri Esri UC2013. Technical Workshop. Why use 3D GIS? Because
COMPUTER AIDED ARCHITECTURAL GRAPHICS
 COMPUTER AIDED ARCHITECTURAL GRAPHICS FFD 201/Fall 2011 HANDOUT 2/ 3DS MAX-INTRODUCTION 3ds Max is software which can be use for modelling, animation and rendering. It is used in lots of design areas such
COMPUTER AIDED ARCHITECTURAL GRAPHICS FFD 201/Fall 2011 HANDOUT 2/ 3DS MAX-INTRODUCTION 3ds Max is software which can be use for modelling, animation and rendering. It is used in lots of design areas such
Introduction. File preparation
 White Paper Design and printing guidelines Introduction A print job can be created in either of the following ways: NOTE: HP SmartStream 3D Build Manager supports STL and 3MF files. By using the HP SmartStream
White Paper Design and printing guidelines Introduction A print job can be created in either of the following ways: NOTE: HP SmartStream 3D Build Manager supports STL and 3MF files. By using the HP SmartStream
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY
 APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY ISPRS Working Group V/2 Conference, Cultural heritage data acquisition and processing 17th 19th August 2011 - University of York, UK Why
APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY ISPRS Working Group V/2 Conference, Cultural heritage data acquisition and processing 17th 19th August 2011 - University of York, UK Why
Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping
 Master Thesis Ruxandra MOROSAN Ruxandra MOROSAN Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping Duration of the Thesis: 6 months
Master Thesis Ruxandra MOROSAN Ruxandra MOROSAN Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping Duration of the Thesis: 6 months
FIELD OPERATION CENTER Coastal Hydraulics Lab. Field Data Collection and Analysis Branch Our Team Members
 FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
What s New in ecognition 9.0. Christian Weise
 What s New in ecognition 9.0 Christian Weise Presenting ecognition 9 Release Date: March 2014 Who s eligible? All user with a valid ecognition maintenance contract Presenting ecognition 9 ecognition version
What s New in ecognition 9.0 Christian Weise Presenting ecognition 9 Release Date: March 2014 Who s eligible? All user with a valid ecognition maintenance contract Presenting ecognition 9 ecognition version
What s New in Emulate3D. New Tag Grid
 What s New in 2016 Emulate3D New Tag Grid The TagBrowser Tag Grid now appears in the main Demo3D properties pane, making it easier to see the tags bound to each component in the model, and to observe component
What s New in 2016 Emulate3D New Tag Grid The TagBrowser Tag Grid now appears in the main Demo3D properties pane, making it easier to see the tags bound to each component in the model, and to observe component
HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS
AUTOMATISED SCAN METHODS") HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS cirp GmbH 3D models features spare part identification load simulation mesh repair search in data bases machine learning
HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS cirp GmbH 3D models features spare part identification load simulation mesh repair search in data bases machine learning
Point Clouds to IFC/BrIM Objective:
 Point Clouds to IFC/BrIM Objective: Develop and demonstrate a point cloud data processing solution, which takes a point cloud of a bridge obtained from laser scanning as input, and generates a solid model
Point Clouds to IFC/BrIM Objective: Develop and demonstrate a point cloud data processing solution, which takes a point cloud of a bridge obtained from laser scanning as input, and generates a solid model
Realworks Software. A Powerful 3D Laser Scanning Office Software Suite
 TECHNICAL NOTES Realworks Software A Powerful 3D Laser Scanning Office Software Suite Trimble RealWorks is a powerful office software that imports rich data from your 3D laser scanning instrument and transforms
TECHNICAL NOTES Realworks Software A Powerful 3D Laser Scanning Office Software Suite Trimble RealWorks is a powerful office software that imports rich data from your 3D laser scanning instrument and transforms
Efficient and Effective Quality Assessment of As-Is Building Information Models and 3D Laser-Scanned Data
 Efficient and Effective Quality Assessment of As-Is Building Information Models and 3D Laser-Scanned Data Pingbo Tang 1, Engin Burak Anil 2, Burcu Akinci 2, Daniel Huber 3 1 Civil and Construction Engineering
Efficient and Effective Quality Assessment of As-Is Building Information Models and 3D Laser-Scanned Data Pingbo Tang 1, Engin Burak Anil 2, Burcu Akinci 2, Daniel Huber 3 1 Civil and Construction Engineering
Automated Processing for 3D Mosaic Generation, a Change of Paradigm
 Automated Processing for 3D Mosaic Generation, a Change of Paradigm Frank BIGNONE, Japan Key Words: 3D Urban Model, Street Imagery, Oblique imagery, Mobile Mapping System, Parallel processing, Digital
Automated Processing for 3D Mosaic Generation, a Change of Paradigm Frank BIGNONE, Japan Key Words: 3D Urban Model, Street Imagery, Oblique imagery, Mobile Mapping System, Parallel processing, Digital
3DReshaper Help DReshaper Beginner's Guide. Surveying
 3DReshaper Beginner's Guide Surveying 1 of 29 Cross sections Exercise: Tunnel analysis Surface analysis Exercise: Complete analysis of a concrete floor Surveying extraction Exercise: Automatic extraction
3DReshaper Beginner's Guide Surveying 1 of 29 Cross sections Exercise: Tunnel analysis Surface analysis Exercise: Complete analysis of a concrete floor Surveying extraction Exercise: Automatic extraction
STL Rapid Prototyping
 CATIA V5 Training Foils STL Rapid Prototyping Version 5 Release 19 January 2009 EDU_CAT_EN_STL_FI_V5R19 1 About this course Objectives of the course Upon completion of this course you will learn how to
CATIA V5 Training Foils STL Rapid Prototyping Version 5 Release 19 January 2009 EDU_CAT_EN_STL_FI_V5R19 1 About this course Objectives of the course Upon completion of this course you will learn how to
Leica 3D Disto PROJECTOR function for stair case applications
 Leica 3D Disto PROJECTOR function for stair case applications Workflow description: Measurement Stair Design Set Out of fixing points Preparing the measurement 1 mark 1 point on each wall of the stair
Leica 3D Disto PROJECTOR function for stair case applications Workflow description: Measurement Stair Design Set Out of fixing points Preparing the measurement 1 mark 1 point on each wall of the stair
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
What's New in ecognition 9
 Christian Weise Product Manager APRIL 2016 What's New in ecognition 9 Introduction Background ecognition Suite Advanced analysis software and development environment available for geospatial applications
Christian Weise Product Manager APRIL 2016 What's New in ecognition 9 Introduction Background ecognition Suite Advanced analysis software and development environment available for geospatial applications
Outline. COMSOL Multyphysics: Overview of software package and capabilities
 COMSOL Multyphysics: Overview of software package and capabilities Lecture 5 Special Topics: Device Modeling Outline Basic concepts and modeling paradigm Overview of capabilities Steps in setting-up a
COMSOL Multyphysics: Overview of software package and capabilities Lecture 5 Special Topics: Device Modeling Outline Basic concepts and modeling paradigm Overview of capabilities Steps in setting-up a
Artlantis training for new users
 Artlantis training for new users page 2 This training program reviews the main features of Artlantis. You will learn about the various presentation types such as still images, ivisit 3D panoramas, VR objects
Artlantis training for new users page 2 This training program reviews the main features of Artlantis. You will learn about the various presentation types such as still images, ivisit 3D panoramas, VR objects
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Graphics and Interaction Rendering pipeline & object modelling
 433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Tools, Tips, and Workflows Exporting Final Product LP360
 LP360 Support Revision 1.0 l Final products can be exported from LIDAR data using either LP360 command line executables or the LP360 Export Wizard. Some export functions and resulting products include,
LP360 Support Revision 1.0 l Final products can be exported from LIDAR data using either LP360 command line executables or the LP360 Export Wizard. Some export functions and resulting products include,
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
TERRESTRIAL LASER SCANNING AND APPLICATION IN GEODETIC ENGINEERING
 TERRESTRIAL LASER SCANNING AND APPLICATION IN GEODETIC ENGINEERING Marko Pejić U n i ve rs i t y o f B e l g ra d e, Fa c u l t y o f C i v i l E n g i n e e r i n g Mostar, 10.19.2017. TLS method and
TERRESTRIAL LASER SCANNING AND APPLICATION IN GEODETIC ENGINEERING Marko Pejić U n i ve rs i t y o f B e l g ra d e, Fa c u l t y o f C i v i l E n g i n e e r i n g Mostar, 10.19.2017. TLS method and
PhotoScan. Fully automated professional photogrammetric kit
 PhotoScan Fully automated professional photogrammetric kit Agisoft PhotoScan is a stand-alone photogrammetric software solution for automatic generation of dense point clouds, textured polygonal models,
PhotoScan Fully automated professional photogrammetric kit Agisoft PhotoScan is a stand-alone photogrammetric software solution for automatic generation of dense point clouds, textured polygonal models,
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
SpaceClaim Professional The Natural 3D Design System. Advanced Technology
 SpaceClaim Professional The Natural 3D Design System SpaceClaim Professional is the 3D productivity tool for engineers who contribute to the design and manufacture of mechanical products across a broad
SpaceClaim Professional The Natural 3D Design System SpaceClaim Professional is the 3D productivity tool for engineers who contribute to the design and manufacture of mechanical products across a broad