Introduction to Real-Time Operating Systems
|
|
|
- Lindsay Carpenter
- 6 years ago
- Views:
Transcription
1 Introduction to Real-Time Operating Systems
2 GPOS vs RTOS General purpose operating systems Real-time operating systems
3 GPOS vs RTOS: Similarities Multitasking Resource management OS services to applications Abstracting the hardware
4 Characteristics of RTOS Reliability in embedded application Scale up or down ability Faster performance Reduced memory requirement Scheduling policies for real-time Diskless portability
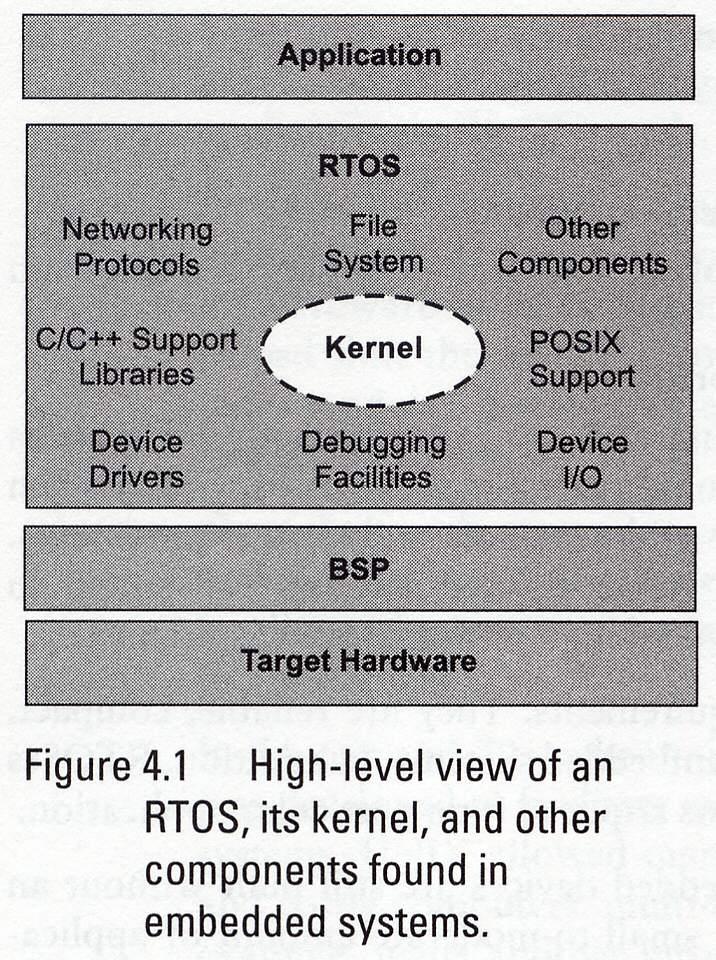
5

6
7 Kernel Objects Help developers creates applications for real-time embedded systems
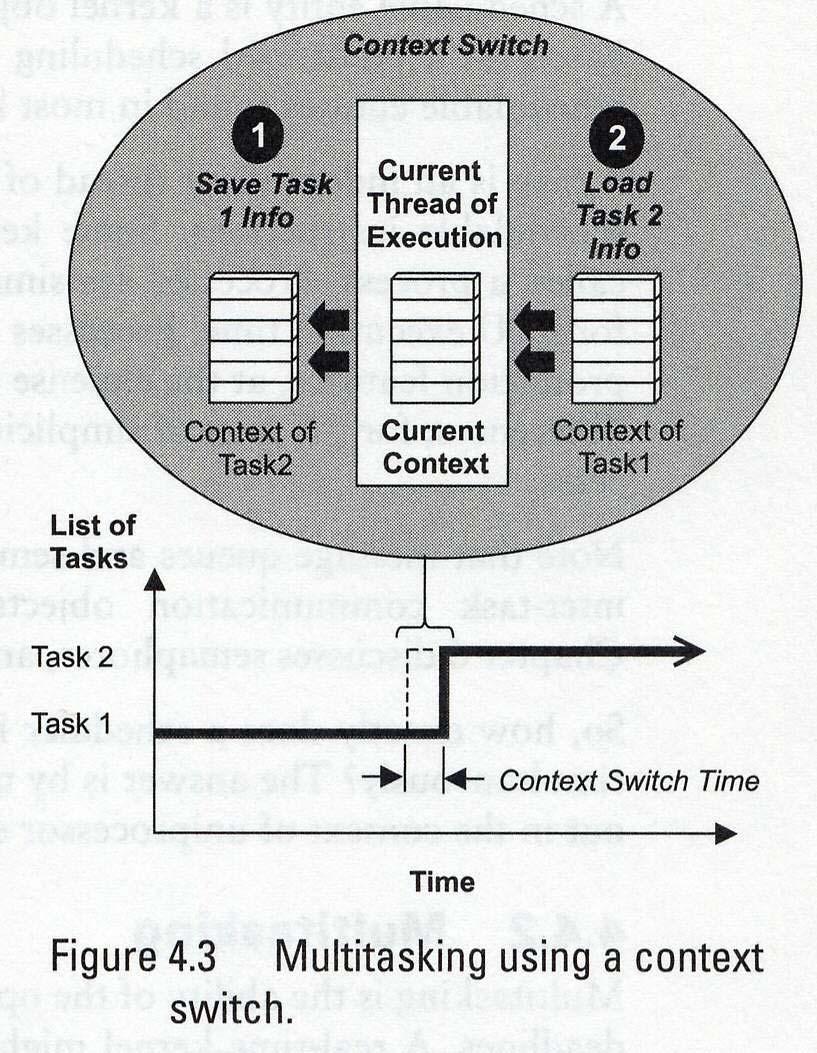
8 Scheduler Determine which task executes when Schedulable entities-a kernel object that can compete for execution on a system-> process, task Multitasking: many thread of execution appear to be running concurrently
9 Scheduler Context: the state of CPU registers Context switch When a new task is created, TCB(task control block) is also created TCB: system data structure
10
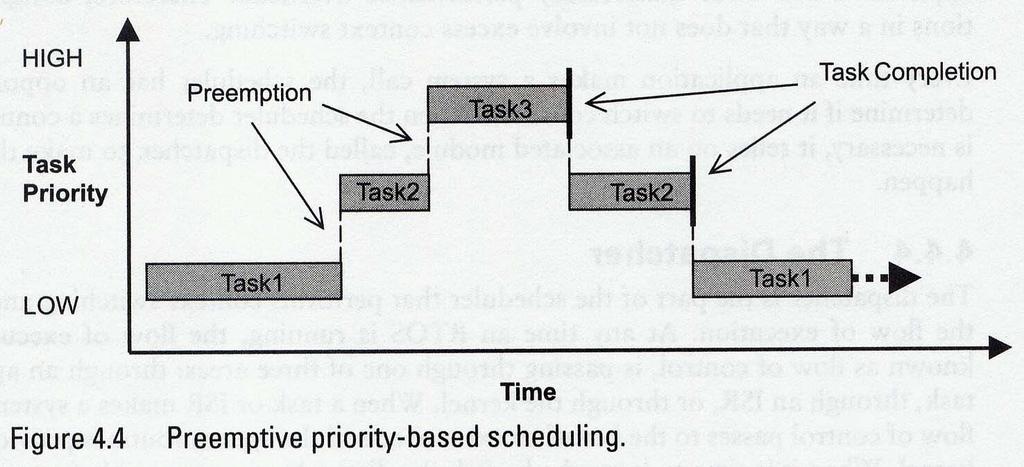
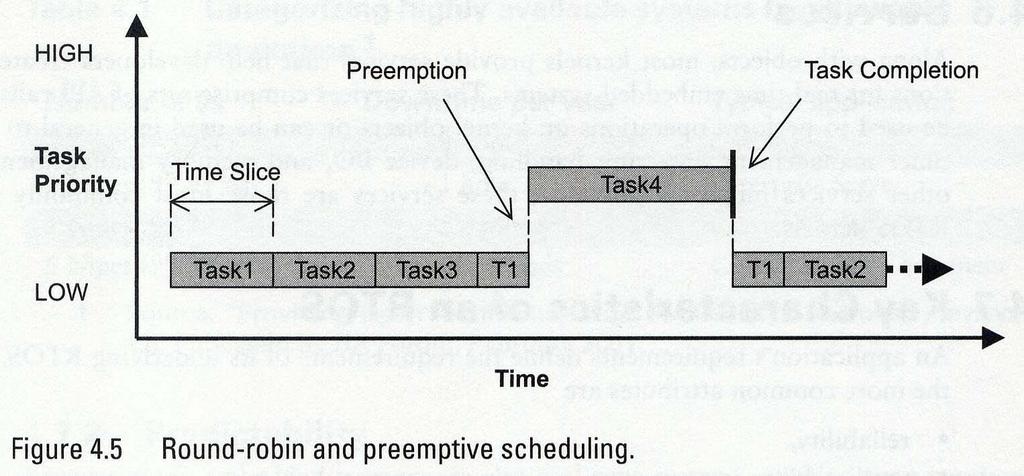
11 Scheduling Algorithms Preemptive priority-based scheduling Round-robin scheduling
12
13 256 priority levels 0: highest 256: lowest
14
15 Objects Tasks Semaphore: token-like objects for synchronization & mutual exclusion Message queue: buffer-like data structures
16 Common Real-Time Design Problems Concurrency Activity synchronization Data communication Developers combine basic kernel objects
17 Key Characteristics of RTOS Reliability Predictability Performance Compactness Scalability
18 Tasks
19 Defining a Task A task is an independent thread of execution that can compete with each other concurrent tasks for processor execution time Developer decompose applications into multiple concurrent tasks to optimize the handling of inputs and outputs within set time constraints
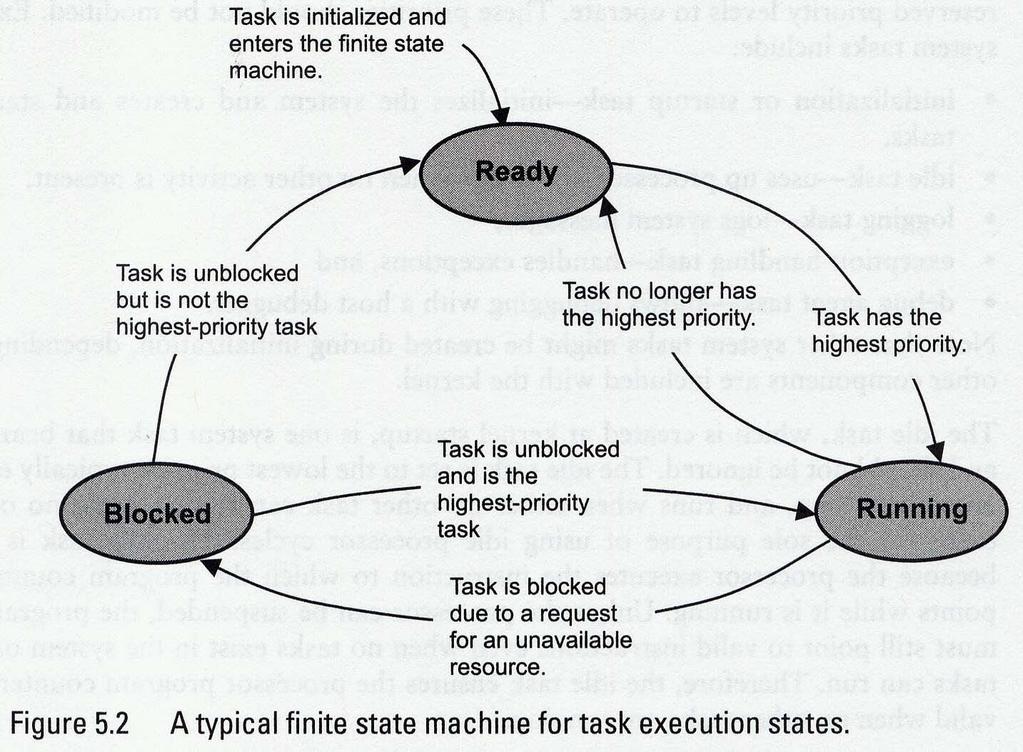
20 Task States Ready Running Blocked
21
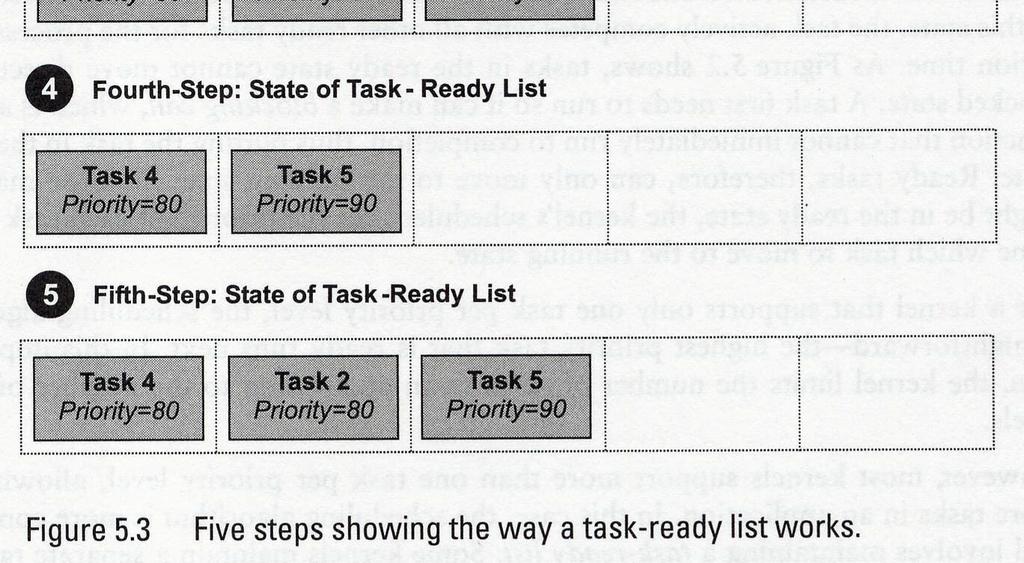
22 Ready State Most kernels support more than one task per priority level Task-ready-list

23
24 Running State Can move to the blocked state 1. By making a call requesting an un available resource 2. By making a call requesting to wait for an event to occur 3. By making a call to delay
25 Blocked State Without blocked state, lower priority tasks could not run! CPU starvation occurs when higher priority tasks use all of the CPU execution time and lower priority tasks do not get to run. A task can only move to the blocked state by making a blocking call, requesting that some blocking condition be met.
26 Blocking Condition (Unblocking Condition) A semaphore is released A message arrives A time delay expires
27 Typical Task Structures Run-to-completion tasks Endless-loop tasks
28 Run-to-Completion Tasks Application-level initialization task The application initialization task typically has a higher priority than the application tasks that it creates so that its initialization work is not preempted.
29 RunToCompletionTask() { initialize application create endless loop tasks -lower priority creates kernel objects delete or suspend this task }
30 Endless-Loop Tasks One or more blocking calls within the body of the loop
31 EndlessLoopTask() { initialization code Loop Forever { body of loop make one or more blocking calls } }
32 Synchronization,Communication and Concurrency Tasks synchronize and communicate by using intertask primitives (semaphores, message queues, signals, pipes)
33 Semaphores
34 Semaphore (Token) A kernel object One or more threads of execution can acquire or release for the purpose of synchronization or mutual exclusion
35 Semaphore Semaphore is like a key that allows a task to carry out some operation or to access a resource. (e.g. a key or keys to the lab)
36 Semaphore Count Semaphore (Token) count is initialized when created A task acquire the semaphore: count is decremented A task releases the semaphore: count is incremented Token count = 0 : a requesting task blocks

37 Binary Semaphore Value: 0 unavailable/empty Value: 1 available/full

38 Counting Semaphore
39 Mutual Exclusion (Mutex) Semaphore A special binary semaphore that supports ownership, recursive access, task deletion safety, priority inversion avoidance protocol.
40 Mutex Ownership Ownership of a mutex is gained when a task first locks the mutex by acquiring it. A task loses ownership of the mutex when it unlocks it by releasing it. Recursive locking: when a task requiring exclusive access to a shared resource calls one or more routines that also require access to the same resource.
41 Mutex Task Deletion Safety: While a task owns a mutex, the task cannot be deleted Priority inversion avoidance

42 Typical Semaphore Use Wait-and-Signal Synchronization
43 Wait-and-Signal Synchronization twaittask runs first twaittask makes a request to acquire the semaphore but blocked tsignaltask has a chance to run tsignaltask releases the semaphore twaittask unblocked and running
44 Wait-and-Signal Synchronization twaittask() { Acquire binary semaphore } tsignaltask() { Release binary semaphore }

45 Multiple-Task Wait_and_Signal Synchronization tsignaltask: lower priority
46 Multiple-Task Wait_and_Signal Synchronization twaittask1() { Acquire binary semaphore } twaittask2() { } tsignaltask() { Flush binary semaphore s task-waiting list }

47 Single Shared-Resource-Access Synchronization Danger: problem when the 3 rd task release -> use mutex
48 Single Shared-Resource-Access Synchronization taccesstask() { Acquire binary semaphore Read or write to shared resource Release binary semaphore }

49 Recursive Shared-Resource- Access Synchronization taccesstask calls -> Routine A -> Routine B : need to access to the same shared resource
50 Recursive Shared-Resource- Access Synchronization taccesstask() { Acquire mutex Access shared resource Call RoutineA Release mutex } RoutineA() { Acquire mutex Access shared resource Call RoutineB Release mutex } RoutineB() { Acquire mutex Access shared resource Call RoutineB Release mutex }
51 Message Queues
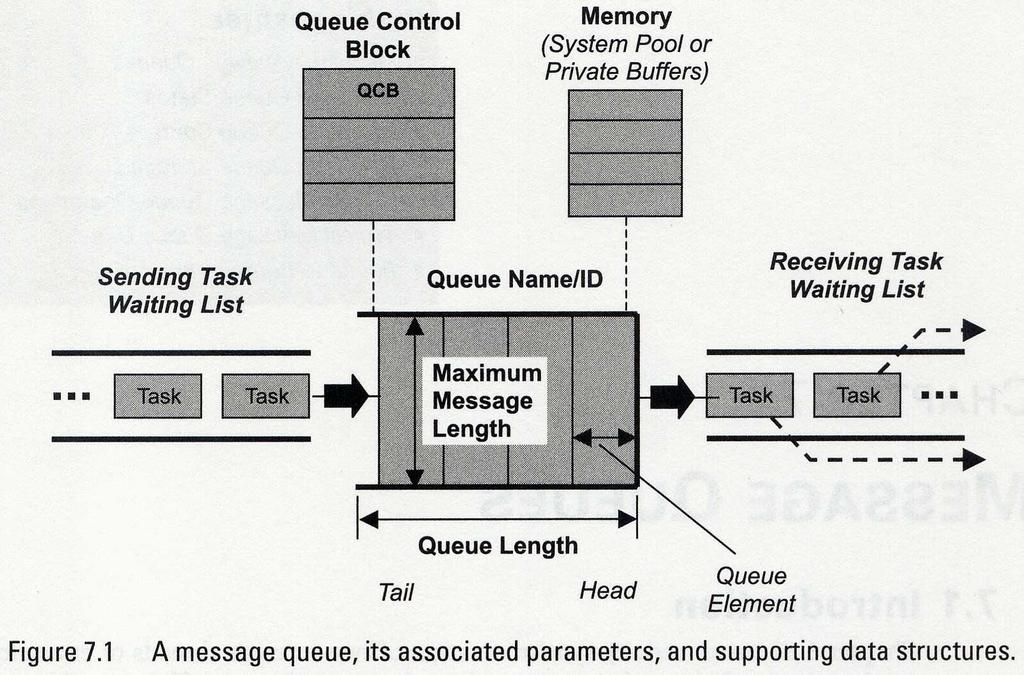
52 Message Queues A message queue is a buffer-like object through which tasks and ISRs send and receive messages to communicate and synchronize with data It temporarily holds message from a sender until the intended receiver is ready to read them.
53

54 Message Queue Content For long message, use pointer
 Not synchronized Does not")
55 Typical Message Queue Use Non-interlocked, one-way data communication (loosely coupled) Not synchronized Does not require ACK
What s An OS? Cyclic Executive. Interrupts. Advantages Simple implementation Low overhead Very predictable
 What s An OS? Provides environment for executing programs Process abstraction for multitasking/concurrency scheduling Hardware abstraction layer (device drivers) File systems Communication Do we need an
What s An OS? Provides environment for executing programs Process abstraction for multitasking/concurrency scheduling Hardware abstraction layer (device drivers) File systems Communication Do we need an
Concurrency: Deadlock and Starvation
 Concurrency: Deadlock and Starvation Chapter 6 E&CE 354: Processes 1 Deadlock Deadlock = situation in which every process from a set is permanently blocked, i.e. cannot proceed with execution Common cause:
Concurrency: Deadlock and Starvation Chapter 6 E&CE 354: Processes 1 Deadlock Deadlock = situation in which every process from a set is permanently blocked, i.e. cannot proceed with execution Common cause:
Semaphore. Originally called P() and V() wait (S) { while S <= 0 ; // no-op S--; } signal (S) { S++; }
 and V() wait (S) { while S <= 0 ; // no-op S--; } signal (S) { S++; }") Semaphore Semaphore S integer variable Two standard operations modify S: wait() and signal() Originally called P() and V() Can only be accessed via two indivisible (atomic) operations wait (S) { while
Semaphore Semaphore S integer variable Two standard operations modify S: wait() and signal() Originally called P() and V() Can only be accessed via two indivisible (atomic) operations wait (S) { while
IT 540 Operating Systems ECE519 Advanced Operating Systems
 IT 540 Operating Systems ECE519 Advanced Operating Systems Prof. Dr. Hasan Hüseyin BALIK (5 th Week) (Advanced) Operating Systems 5. Concurrency: Mutual Exclusion and Synchronization 5. Outline Principles
IT 540 Operating Systems ECE519 Advanced Operating Systems Prof. Dr. Hasan Hüseyin BALIK (5 th Week) (Advanced) Operating Systems 5. Concurrency: Mutual Exclusion and Synchronization 5. Outline Principles
Concurrency: a crash course
 Chair of Software Engineering Carlo A. Furia, Marco Piccioni, Bertrand Meyer Concurrency: a crash course Concurrent computing Applications designed as a collection of computational units that may execute
Chair of Software Engineering Carlo A. Furia, Marco Piccioni, Bertrand Meyer Concurrency: a crash course Concurrent computing Applications designed as a collection of computational units that may execute
EE458 - Embedded Systems Lecture 8 Semaphores
 EE458 - Embedded Systems Lecture 8 Semaphores Outline Introduction to Semaphores Binary and Counting Semaphores Mutexes Typical Applications RTEMS Semaphores References RTC: Chapter 6 CUG: Chapter 9 1
EE458 - Embedded Systems Lecture 8 Semaphores Outline Introduction to Semaphores Binary and Counting Semaphores Mutexes Typical Applications RTEMS Semaphores References RTC: Chapter 6 CUG: Chapter 9 1
Tasks. Task Implementation and management
 Tasks Task Implementation and management Tasks Vocab Absolute time - real world time Relative time - time referenced to some event Interval - any slice of time characterized by start & end times Duration
Tasks Task Implementation and management Tasks Vocab Absolute time - real world time Relative time - time referenced to some event Interval - any slice of time characterized by start & end times Duration
Concurrency: Deadlock and Starvation. Chapter 6
 Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other Involve conflicting needs for resources
Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other Involve conflicting needs for resources
Real-Time Programming
 Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Embedded Systems. 5. Operating Systems. Lothar Thiele. Computer Engineering and Networks Laboratory
 Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Deadlock. Concurrency: Deadlock and Starvation. Reusable Resources
 Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other No efficient solution Involve conflicting
Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other No efficient solution Involve conflicting
Process & Thread Management II. Queues. Sleep() and Sleep Queues CIS 657
 and Sleep Queues CIS 657") Process & Thread Management II CIS 657 Queues Run queues: hold threads ready to execute Not a single ready queue; 64 queues All threads in same queue are treated as same priority Sleep queues: hold threads
Process & Thread Management II CIS 657 Queues Run queues: hold threads ready to execute Not a single ready queue; 64 queues All threads in same queue are treated as same priority Sleep queues: hold threads
Process & Thread Management II CIS 657
 Process & Thread Management II CIS 657 Queues Run queues: hold threads ready to execute Not a single ready queue; 64 queues All threads in same queue are treated as same priority Sleep queues: hold threads
Process & Thread Management II CIS 657 Queues Run queues: hold threads ready to execute Not a single ready queue; 64 queues All threads in same queue are treated as same priority Sleep queues: hold threads
Multiprocessor and Real- Time Scheduling. Chapter 10
 Multiprocessor and Real- Time Scheduling Chapter 10 Classifications of Multiprocessor Loosely coupled multiprocessor each processor has its own memory and I/O channels Functionally specialized processors
Multiprocessor and Real- Time Scheduling Chapter 10 Classifications of Multiprocessor Loosely coupled multiprocessor each processor has its own memory and I/O channels Functionally specialized processors
Embedded Systems and Software
 Embedded Systems and Software Concurrent Processes and Real-time Scheduling Concurrency & Scheduling 1 Concurrency in Embedded Systems Often, an embedded system must carry out more than one task simultaneously
Embedded Systems and Software Concurrent Processes and Real-time Scheduling Concurrency & Scheduling 1 Concurrency in Embedded Systems Often, an embedded system must carry out more than one task simultaneously
RTOS Real T i Time me Operating System System Concepts Part 2
 RTOS Real Time Operating System Concepts Part 2 Real time System Pitfalls - 4: The Ariane 5 satelite launch rocket Rocket self destructed in 4 June -1996. Exactly after 40 second of lift off at an attitude
RTOS Real Time Operating System Concepts Part 2 Real time System Pitfalls - 4: The Ariane 5 satelite launch rocket Rocket self destructed in 4 June -1996. Exactly after 40 second of lift off at an attitude
CS 571 Operating Systems. Midterm Review. Angelos Stavrou, George Mason University
 CS 571 Operating Systems Midterm Review Angelos Stavrou, George Mason University Class Midterm: Grading 2 Grading Midterm: 25% Theory Part 60% (1h 30m) Programming Part 40% (1h) Theory Part (Closed Books):
CS 571 Operating Systems Midterm Review Angelos Stavrou, George Mason University Class Midterm: Grading 2 Grading Midterm: 25% Theory Part 60% (1h 30m) Programming Part 40% (1h) Theory Part (Closed Books):
Threads. Threads The Thread Model (1) CSCE 351: Operating System Kernels Witawas Srisa-an Chapter 4-5
 CSCE 351: Operating System Kernels Witawas Srisa-an Chapter 4-5") Threads CSCE 351: Operating System Kernels Witawas Srisa-an Chapter 4-5 1 Threads The Thread Model (1) (a) Three processes each with one thread (b) One process with three threads 2 1 The Thread Model (2)
Threads CSCE 351: Operating System Kernels Witawas Srisa-an Chapter 4-5 1 Threads The Thread Model (1) (a) Three processes each with one thread (b) One process with three threads 2 1 The Thread Model (2)
Chapter 6 Concurrency: Deadlock and Starvation
 Operating Systems: Internals and Design Principles Chapter 6 Concurrency: Deadlock and Starvation Seventh Edition By William Stallings Operating Systems: Internals and Design Principles When two trains
Operating Systems: Internals and Design Principles Chapter 6 Concurrency: Deadlock and Starvation Seventh Edition By William Stallings Operating Systems: Internals and Design Principles When two trains
CSC Operating Systems Spring Lecture - XII Midterm Review. Tevfik Ko!ar. Louisiana State University. March 4 th, 2008.
 CSC 4103 - Operating Systems Spring 2008 Lecture - XII Midterm Review Tevfik Ko!ar Louisiana State University March 4 th, 2008 1 I/O Structure After I/O starts, control returns to user program only upon
CSC 4103 - Operating Systems Spring 2008 Lecture - XII Midterm Review Tevfik Ko!ar Louisiana State University March 4 th, 2008 1 I/O Structure After I/O starts, control returns to user program only upon
RT3 - FreeRTOS Real Time Programming
 Formation FreeRTOS Real Time Programming: Real-time programming applied to the FreeRTOS operating system - Systèmes d'exploitation: RTOS RT3 - FreeRTOS Real Time Programming Real-time programming applied
Formation FreeRTOS Real Time Programming: Real-time programming applied to the FreeRTOS operating system - Systèmes d'exploitation: RTOS RT3 - FreeRTOS Real Time Programming Real-time programming applied
Operating Systems: Quiz2 December 15, Class: No. Name:
 Operating Systems: Quiz2 December 15, 2006 Class: No. Name: Part I (30%) Multiple Choice Each of the following questions has only one correct answer. Fill the correct one in the blank in front of each
Operating Systems: Quiz2 December 15, 2006 Class: No. Name: Part I (30%) Multiple Choice Each of the following questions has only one correct answer. Fill the correct one in the blank in front of each
CSE 4/521 Introduction to Operating Systems
 CSE 4/521 Introduction to Operating Systems Lecture 7 Process Synchronization II (Classic Problems of Synchronization, Synchronization Examples) Summer 2018 Overview Objective: 1. To examine several classical
CSE 4/521 Introduction to Operating Systems Lecture 7 Process Synchronization II (Classic Problems of Synchronization, Synchronization Examples) Summer 2018 Overview Objective: 1. To examine several classical
Concept of a process
 Concept of a process In the context of this course a process is a program whose execution is in progress States of a process: running, ready, blocked Submit Ready Running Completion Blocked Concurrent
Concept of a process In the context of this course a process is a program whose execution is in progress States of a process: running, ready, blocked Submit Ready Running Completion Blocked Concurrent
Lecture notes Lectures 1 through 5 (up through lecture 5 slide 63) Book Chapters 1-4
 Book Chapters 1-4") EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
Operating Systems. Designed and Presented by Dr. Ayman Elshenawy Elsefy
 Operating Systems Designed and Presented by Dr. Ayman Elshenawy Elsefy Dept. of Systems & Computer Eng.. AL-AZHAR University Website : eaymanelshenawy.wordpress.com Email : eaymanelshenawy@yahoo.com Reference
Operating Systems Designed and Presented by Dr. Ayman Elshenawy Elsefy Dept. of Systems & Computer Eng.. AL-AZHAR University Website : eaymanelshenawy.wordpress.com Email : eaymanelshenawy@yahoo.com Reference
CSCI-GA Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke
 CSCI-GA.2250-001 Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke frankeh@cs.nyu.edu Processes Vs Threads The unit of dispatching is referred to as a thread or lightweight
CSCI-GA.2250-001 Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke frankeh@cs.nyu.edu Processes Vs Threads The unit of dispatching is referred to as a thread or lightweight
UNIT:2. Process Management
 1 UNIT:2 Process Management SYLLABUS 2.1 Process and Process management i. Process model overview ii. Programmers view of process iii. Process states 2.2 Process and Processor Scheduling i Scheduling Criteria
1 UNIT:2 Process Management SYLLABUS 2.1 Process and Process management i. Process model overview ii. Programmers view of process iii. Process states 2.2 Process and Processor Scheduling i Scheduling Criteria
Last Class: CPU Scheduling! Adjusting Priorities in MLFQ!
 Last Class: CPU Scheduling! Scheduling Algorithms: FCFS Round Robin SJF Multilevel Feedback Queues Lottery Scheduling Review questions: How does each work? Advantages? Disadvantages? Lecture 7, page 1
Last Class: CPU Scheduling! Scheduling Algorithms: FCFS Round Robin SJF Multilevel Feedback Queues Lottery Scheduling Review questions: How does each work? Advantages? Disadvantages? Lecture 7, page 1
Micrium µc/os II RTOS Introduction EE J. E. Lumpp
 Micrium µc/os II RTOS Introduction (by Jean Labrosse) EE599 001 Fall 2012 J. E. Lumpp μc/os II μc/os II is a highly portable, ROMable, very scalable, preemptive real time, deterministic, multitasking kernel
Micrium µc/os II RTOS Introduction (by Jean Labrosse) EE599 001 Fall 2012 J. E. Lumpp μc/os II μc/os II is a highly portable, ROMable, very scalable, preemptive real time, deterministic, multitasking kernel
SYNCHRONIZATION M O D E R N O P E R A T I N G S Y S T E M S R E A D 2. 3 E X C E P T A N D S P R I N G 2018
 SYNCHRONIZATION M O D E R N O P E R A T I N G S Y S T E M S R E A D 2. 3 E X C E P T 2. 3. 8 A N D 2. 3. 1 0 S P R I N G 2018 INTER-PROCESS COMMUNICATION 1. How a process pass information to another process
SYNCHRONIZATION M O D E R N O P E R A T I N G S Y S T E M S R E A D 2. 3 E X C E P T 2. 3. 8 A N D 2. 3. 1 0 S P R I N G 2018 INTER-PROCESS COMMUNICATION 1. How a process pass information to another process
Chapter 5 Concurrency: Mutual Exclusion and Synchronization
 Operating Systems: Internals and Design Principles Chapter 5 Concurrency: Mutual Exclusion and Synchronization Seventh Edition By William Stallings Designing correct routines for controlling concurrent
Operating Systems: Internals and Design Principles Chapter 5 Concurrency: Mutual Exclusion and Synchronization Seventh Edition By William Stallings Designing correct routines for controlling concurrent
Operating Systems. Lecture 4 - Concurrency and Synchronization. Master of Computer Science PUF - Hồ Chí Minh 2016/2017
 Operating Systems Lecture 4 - Concurrency and Synchronization Adrien Krähenbühl Master of Computer Science PUF - Hồ Chí Minh 2016/2017 Mutual exclusion Hardware solutions Semaphores IPC: Message passing
Operating Systems Lecture 4 - Concurrency and Synchronization Adrien Krähenbühl Master of Computer Science PUF - Hồ Chí Minh 2016/2017 Mutual exclusion Hardware solutions Semaphores IPC: Message passing
Systemy RT i embedded Wykład 11 Systemy RTOS
 Systemy RT i embedded Wykład 11 Systemy RTOS Wrocław 2013 Plan Introduction Tasks Queues Interrupts Resources Memory management Multiprocessor operation Introduction What s an Operating System? Provides
Systemy RT i embedded Wykład 11 Systemy RTOS Wrocław 2013 Plan Introduction Tasks Queues Interrupts Resources Memory management Multiprocessor operation Introduction What s an Operating System? Provides
Lecture 3: Concurrency & Tasking
 Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
Dealing with Issues for Interprocess Communication
 Dealing with Issues for Interprocess Communication Ref Section 2.3 Tanenbaum 7.1 Overview Processes frequently need to communicate with other processes. In a shell pipe the o/p of one process is passed
Dealing with Issues for Interprocess Communication Ref Section 2.3 Tanenbaum 7.1 Overview Processes frequently need to communicate with other processes. In a shell pipe the o/p of one process is passed
Last Class: Deadlocks. Today
 Last Class: Deadlocks Necessary conditions for deadlock: Mutual exclusion Hold and wait No preemption Circular wait Ways of handling deadlock Deadlock detection and recovery Deadlock prevention Deadlock
Last Class: Deadlocks Necessary conditions for deadlock: Mutual exclusion Hold and wait No preemption Circular wait Ways of handling deadlock Deadlock detection and recovery Deadlock prevention Deadlock
Course Syllabus. Operating Systems
 Course Syllabus. Introduction - History; Views; Concepts; Structure 2. Process Management - Processes; State + Resources; Threads; Unix implementation of Processes 3. Scheduling Paradigms; Unix; Modeling
Course Syllabus. Introduction - History; Views; Concepts; Structure 2. Process Management - Processes; State + Resources; Threads; Unix implementation of Processes 3. Scheduling Paradigms; Unix; Modeling
Concurrency Race Conditions and Deadlocks
 Concurrency Race Conditions and Deadlocks Kartik Gopalan Chapters 2 (2.3) and 6 Tanenbaum s Modern OS Sequential Loosely, doing many things, but one after another E.g. Finish one assignment, then another
Concurrency Race Conditions and Deadlocks Kartik Gopalan Chapters 2 (2.3) and 6 Tanenbaum s Modern OS Sequential Loosely, doing many things, but one after another E.g. Finish one assignment, then another
Semaphores. Chapter. verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems
 Chapter 7 Semaphores Tornado Training Workshop Copyright 7-1 verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems 7.1 Overview Semaphores Binary Semaphores
Chapter 7 Semaphores Tornado Training Workshop Copyright 7-1 verview inary Semaphores for Task Synchronization utex Semaphores to Solve Mutual Exclusion Problems 7.1 Overview Semaphores Binary Semaphores
Part B Questions. Unit I
 Part B Questions Unit I 1. Explain the specification of Embedded system. Safety and Reliability Performance Power Consumption Cost Robustness Size Limited User Interface Software Upgradation Capability
Part B Questions Unit I 1. Explain the specification of Embedded system. Safety and Reliability Performance Power Consumption Cost Robustness Size Limited User Interface Software Upgradation Capability
Chapter 5 Concurrency: Mutual Exclusion. and. Synchronization. Operating Systems: Internals. and. Design Principles
 Operating Systems: Internals and Design Principles Chapter 5 Concurrency: Mutual Exclusion and Synchronization Seventh Edition By William Stallings Designing correct routines for controlling concurrent
Operating Systems: Internals and Design Principles Chapter 5 Concurrency: Mutual Exclusion and Synchronization Seventh Edition By William Stallings Designing correct routines for controlling concurrent
Lesson 6: Process Synchronization
 Lesson 6: Process Synchronization Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks Semaphores Classic Problems of Synchronization
Lesson 6: Process Synchronization Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks Semaphores Classic Problems of Synchronization
Midterm Exam. October 20th, Thursday NSC
 CSE 421/521 - Operating Systems Fall 2011 Lecture - XIV Midterm Review Tevfik Koşar University at Buffalo October 18 th, 2011 1 Midterm Exam October 20th, Thursday 9:30am-10:50am @215 NSC Chapters included
CSE 421/521 - Operating Systems Fall 2011 Lecture - XIV Midterm Review Tevfik Koşar University at Buffalo October 18 th, 2011 1 Midterm Exam October 20th, Thursday 9:30am-10:50am @215 NSC Chapters included
Operating Systems: William Stallings. Starvation. Patricia Roy Manatee Community College, Venice, FL 2008, Prentice Hall
 Operating Systems: Internals and Design Principles, 6/E William Stallings Chapter 6 Concurrency: Deadlock and Starvation Patricia Roy Manatee Community College, Venice, FL 2008, Prentice Hall Deadlock
Operating Systems: Internals and Design Principles, 6/E William Stallings Chapter 6 Concurrency: Deadlock and Starvation Patricia Roy Manatee Community College, Venice, FL 2008, Prentice Hall Deadlock
Introduction to OS Synchronization MOS 2.3
 Introduction to OS Synchronization MOS 2.3 Mahmoud El-Gayyar elgayyar@ci.suez.edu.eg Mahmoud El-Gayyar / Introduction to OS 1 Challenge How can we help processes synchronize with each other? E.g., how
Introduction to OS Synchronization MOS 2.3 Mahmoud El-Gayyar elgayyar@ci.suez.edu.eg Mahmoud El-Gayyar / Introduction to OS 1 Challenge How can we help processes synchronize with each other? E.g., how
CS 153 Design of Operating Systems Winter 2016
 CS 153 Design of Operating Systems Winter 2016 Lecture 7: Synchronization Administrivia Homework 1 Due today by the end of day Hopefully you have started on project 1 by now? Kernel-level threads (preemptable
CS 153 Design of Operating Systems Winter 2016 Lecture 7: Synchronization Administrivia Homework 1 Due today by the end of day Hopefully you have started on project 1 by now? Kernel-level threads (preemptable
Short Term Courses (Including Project Work)
") Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
 UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
FreeRTOS. A Brief Overview. Christopher Kenna. October 1, Avionics. FreeRTOS 1 / 34
 A Brief Overview Christopher Kenna Avionics October 1, 2010 1 / 34 Introduction Outline 1 Introduction About Kernel Overview 2 Tasks Tasks versus Co-Routines Task Details 3 IPC and Synchronization Queues
A Brief Overview Christopher Kenna Avionics October 1, 2010 1 / 34 Introduction Outline 1 Introduction About Kernel Overview 2 Tasks Tasks versus Co-Routines Task Details 3 IPC and Synchronization Queues
ENGR 3950U / CSCI 3020U UOIT, Fall 2012 Quiz on Process Synchronization SOLUTIONS
 Name: Student Number: SOLUTIONS ENGR 3950U / CSCI 3020U (Operating Systems) Quiz on Process Synchronization November 13, 2012, Duration: 40 Minutes (10 questions and 8 pages, 45 Marks) Instructor: Dr.
Name: Student Number: SOLUTIONS ENGR 3950U / CSCI 3020U (Operating Systems) Quiz on Process Synchronization November 13, 2012, Duration: 40 Minutes (10 questions and 8 pages, 45 Marks) Instructor: Dr.
The components in the middle are core and the components on the outside are optional.
 CHAPTER 2 ucosiii Page 1 ENGG4420 CHAPTER 3 LECTURE 8 October 31 12 9:43 AM MQX BASICS MQX Real Time Operating System has been designed for uni processor, multi processor, and distributedprocessor embedded
CHAPTER 2 ucosiii Page 1 ENGG4420 CHAPTER 3 LECTURE 8 October 31 12 9:43 AM MQX BASICS MQX Real Time Operating System has been designed for uni processor, multi processor, and distributedprocessor embedded
Chapter 2 Processes and Threads
 MODERN OPERATING SYSTEMS Third Edition ANDREW S. TANENBAUM Chapter 2 Processes and Threads The Process Model Figure 2-1. (a) Multiprogramming of four programs. (b) Conceptual model of four independent,
MODERN OPERATING SYSTEMS Third Edition ANDREW S. TANENBAUM Chapter 2 Processes and Threads The Process Model Figure 2-1. (a) Multiprogramming of four programs. (b) Conceptual model of four independent,
Lecture 9: Midterm Review
 Project 1 Due at Midnight Lecture 9: Midterm Review CSE 120: Principles of Operating Systems Alex C. Snoeren Midterm Everything we ve covered is fair game Readings, lectures, homework, and Nachos Yes,
Project 1 Due at Midnight Lecture 9: Midterm Review CSE 120: Principles of Operating Systems Alex C. Snoeren Midterm Everything we ve covered is fair game Readings, lectures, homework, and Nachos Yes,
Concurrency. Chapter 5
 Concurrency 1 Chapter 5 2 Concurrency Is a fundamental concept in operating system design Processes execute interleaved in time on a single processor Creates the illusion of simultaneous execution Benefits
Concurrency 1 Chapter 5 2 Concurrency Is a fundamental concept in operating system design Processes execute interleaved in time on a single processor Creates the illusion of simultaneous execution Benefits
Operating Systems Design Fall 2010 Exam 1 Review. Paul Krzyzanowski
 Operating Systems Design Fall 2010 Exam 1 Review Paul Krzyzanowski pxk@cs.rutgers.edu 1 Question 1 To a programmer, a system call looks just like a function call. Explain the difference in the underlying
Operating Systems Design Fall 2010 Exam 1 Review Paul Krzyzanowski pxk@cs.rutgers.edu 1 Question 1 To a programmer, a system call looks just like a function call. Explain the difference in the underlying
Processes Prof. James L. Frankel Harvard University. Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved.
 Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Synchronization I. Jo, Heeseung
 Synchronization I Jo, Heeseung Today's Topics Synchronization problem Locks 2 Synchronization Threads cooperate in multithreaded programs To share resources, access shared data structures Also, to coordinate
Synchronization I Jo, Heeseung Today's Topics Synchronization problem Locks 2 Synchronization Threads cooperate in multithreaded programs To share resources, access shared data structures Also, to coordinate
Chapter 2 Processes and Threads. Interprocess Communication Race Conditions
 Chapter 2 Processes and Threads [ ] 2.3 Interprocess communication 2.4 Classical IPC problems 2.5 Scheduling 85 Interprocess Communication Race Conditions Two processes want to access shared memory at
Chapter 2 Processes and Threads [ ] 2.3 Interprocess communication 2.4 Classical IPC problems 2.5 Scheduling 85 Interprocess Communication Race Conditions Two processes want to access shared memory at
CSE 153 Design of Operating Systems
 CSE 153 Design of Operating Systems Winter 2018 Midterm Review Midterm in class on Monday Covers material through scheduling and deadlock Based upon lecture material and modules of the book indicated on
CSE 153 Design of Operating Systems Winter 2018 Midterm Review Midterm in class on Monday Covers material through scheduling and deadlock Based upon lecture material and modules of the book indicated on
1. Consider the following page reference string: 1, 2, 3, 4, 2, 1, 5, 6, 2, 1, 2, 3, 7, 6, 3, 2, 1, 2, 3, 6.
 1. Consider the following page reference string: 1, 2, 3, 4, 2, 1, 5, 6, 2, 1, 2, 3, 7, 6, 3, 2, 1, 2, 3, 6. What will be the ratio of page faults for the following replacement algorithms - FIFO replacement
1. Consider the following page reference string: 1, 2, 3, 4, 2, 1, 5, 6, 2, 1, 2, 3, 7, 6, 3, 2, 1, 2, 3, 6. What will be the ratio of page faults for the following replacement algorithms - FIFO replacement
Real-time operating systems and scheduling
 Real-time operating systems and scheduling Problem 21 Consider a real-time operating system (OS) that has a built-in preemptive scheduler. Each task has a unique priority and the lower the priority id,
Real-time operating systems and scheduling Problem 21 Consider a real-time operating system (OS) that has a built-in preemptive scheduler. Each task has a unique priority and the lower the priority id,
Chapter 5: Process Synchronization. Operating System Concepts Essentials 2 nd Edition
 Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
In Class Assignment 2
 In Class Assignment 2 Name: UMBC ID: Academic Integrity Statement: "Integrity of scholarship is essential for an academic community. The University expects that students will honor this. By signing this,
In Class Assignment 2 Name: UMBC ID: Academic Integrity Statement: "Integrity of scholarship is essential for an academic community. The University expects that students will honor this. By signing this,
8: Scheduling. Scheduling. Mark Handley
 8: Scheduling Mark Handley Scheduling On a multiprocessing system, more than one process may be available to run. The task of deciding which process to run next is called scheduling, and is performed by
8: Scheduling Mark Handley Scheduling On a multiprocessing system, more than one process may be available to run. The task of deciding which process to run next is called scheduling, and is performed by
What is the Race Condition? And what is its solution? What is a critical section? And what is the critical section problem?
 What is the Race Condition? And what is its solution? Race Condition: Where several processes access and manipulate the same data concurrently and the outcome of the execution depends on the particular
What is the Race Condition? And what is its solution? Race Condition: Where several processes access and manipulate the same data concurrently and the outcome of the execution depends on the particular
Mutex Implementation
 COS 318: Operating Systems Mutex Implementation Jaswinder Pal Singh Computer Science Department Princeton University (http://www.cs.princeton.edu/courses/cos318/) Revisit Mutual Exclusion (Mutex) u Critical
COS 318: Operating Systems Mutex Implementation Jaswinder Pal Singh Computer Science Department Princeton University (http://www.cs.princeton.edu/courses/cos318/) Revisit Mutual Exclusion (Mutex) u Critical
EE4144: Basic Concepts of Real-Time Operating Systems
 EE4144: Basic Concepts of Real-Time Operating Systems EE4144 Fall 2014 EE4144 EE4144: Basic Concepts of Real-Time Operating Systems Fall 2014 1 / 10 Real-Time Operating System (RTOS) A Real-Time Operating
EE4144: Basic Concepts of Real-Time Operating Systems EE4144 Fall 2014 EE4144 EE4144: Basic Concepts of Real-Time Operating Systems Fall 2014 1 / 10 Real-Time Operating System (RTOS) A Real-Time Operating
Back to RTOS. CSE466 Autumn 00-1
 Back to RTOS Scheduling Deadline Laxity Rate Monotonic Shared Code in Multiprocessing Share Resources: Deadlock avoidance Process Synchronization and Communication Memory Management CSE466 Autumn 00-1
Back to RTOS Scheduling Deadline Laxity Rate Monotonic Shared Code in Multiprocessing Share Resources: Deadlock avoidance Process Synchronization and Communication Memory Management CSE466 Autumn 00-1
Operating Systems Comprehensive Exam. Spring Student ID # 3/16/2006
 Operating Systems Comprehensive Exam Spring 2006 Student ID # 3/16/2006 You must complete all of part I (60%) You must complete two of the three sections in part II (20% each) In Part I, circle or select
Operating Systems Comprehensive Exam Spring 2006 Student ID # 3/16/2006 You must complete all of part I (60%) You must complete two of the three sections in part II (20% each) In Part I, circle or select
C09: Process Synchronization
 CISC 7310X C09: Process Synchronization Hui Chen Department of Computer & Information Science CUNY Brooklyn College 3/29/2018 CUNY Brooklyn College 1 Outline Race condition and critical regions The bounded
CISC 7310X C09: Process Synchronization Hui Chen Department of Computer & Information Science CUNY Brooklyn College 3/29/2018 CUNY Brooklyn College 1 Outline Race condition and critical regions The bounded
Chapter 5: Process Synchronization. Operating System Concepts 9 th Edition
 Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
Real Time & Embedded Systems. Final Exam - Review
 Real Time & Embedded Systems Final Exam - Review Final Exam Review Topics Finite State Machines RTOS Context switching Process states Mutex - purpose and application Blocking versus non-blocking Synchronous
Real Time & Embedded Systems Final Exam - Review Final Exam Review Topics Finite State Machines RTOS Context switching Process states Mutex - purpose and application Blocking versus non-blocking Synchronous
Lecture 4: Real Time Semaphores
 Lecture 4: Real Time Semaphores 1 Lab work (20 min) Configuring VxWorks Kernel VxWorks Hostshell 09/19/2015 Quiz Solution (10) Quiz (15) Lecture Synchronization and Semaphores (45) Lab exercise Binary
Lecture 4: Real Time Semaphores 1 Lab work (20 min) Configuring VxWorks Kernel VxWorks Hostshell 09/19/2015 Quiz Solution (10) Quiz (15) Lecture Synchronization and Semaphores (45) Lab exercise Binary
Embedded Operating Systems
 Embedded Operating Systems Embedded Software Design 熊博安國立中正大學資訊工程研究所 pahsiung@cs.ccu.edu.tw Textbook: Programming Embedded Systems in C and C++, Michael Barr, O Reilly 1 Contents History and Purpose A
Embedded Operating Systems Embedded Software Design 熊博安國立中正大學資訊工程研究所 pahsiung@cs.ccu.edu.tw Textbook: Programming Embedded Systems in C and C++, Michael Barr, O Reilly 1 Contents History and Purpose A
Condition Variables CS 241. Prof. Brighten Godfrey. March 16, University of Illinois
 Condition Variables CS 241 Prof. Brighten Godfrey March 16, 2012 University of Illinois 1 Synchronization primitives Mutex locks Used for exclusive access to a shared resource (critical section) Operations:
Condition Variables CS 241 Prof. Brighten Godfrey March 16, 2012 University of Illinois 1 Synchronization primitives Mutex locks Used for exclusive access to a shared resource (critical section) Operations:
Synchronization for Concurrent Tasks
 Synchronization for Concurrent Tasks Minsoo Ryu Department of Computer Science and Engineering 2 1 Race Condition and Critical Section Page X 2 Algorithmic Approaches Page X 3 Hardware Support Page X 4
Synchronization for Concurrent Tasks Minsoo Ryu Department of Computer Science and Engineering 2 1 Race Condition and Critical Section Page X 2 Algorithmic Approaches Page X 3 Hardware Support Page X 4
Interprocess Communication By: Kaushik Vaghani
 Interprocess Communication By: Kaushik Vaghani Background Race Condition: A situation where several processes access and manipulate the same data concurrently and the outcome of execution depends on the
Interprocess Communication By: Kaushik Vaghani Background Race Condition: A situation where several processes access and manipulate the same data concurrently and the outcome of execution depends on the
Resource management. Real-Time Systems. Resource management. Resource management
 Real-Time Systems Specification Implementation Verification Mutual exclusion is a general problem that exists at several levels in a real-time system. Shared resources internal to the the run-time system:
Real-Time Systems Specification Implementation Verification Mutual exclusion is a general problem that exists at several levels in a real-time system. Shared resources internal to the the run-time system:
CS370 Operating Systems
 CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 11 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel Feedback Queue: Q0, Q1,
CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 11 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel Feedback Queue: Q0, Q1,
The Real Time Thing. What the hack is real time and what to do with it. 22C3 30. December Erwin Erkinger e.at
 The Real Time Thing What the hack is real time and what to do with it 22C3 30. December 2005 Erwin Erkinger vindaome@p e.at Content Part 1: Introduction the vocabulary and the concepts Part 2: Practical
The Real Time Thing What the hack is real time and what to do with it 22C3 30. December 2005 Erwin Erkinger vindaome@p e.at Content Part 1: Introduction the vocabulary and the concepts Part 2: Practical
CS 153 Design of Operating Systems Winter 2016
 CS 153 Design of Operating Systems Winter 2016 Lecture 12: Scheduling & Deadlock Priority Scheduling Priority Scheduling Choose next job based on priority» Airline checkin for first class passengers Can
CS 153 Design of Operating Systems Winter 2016 Lecture 12: Scheduling & Deadlock Priority Scheduling Priority Scheduling Choose next job based on priority» Airline checkin for first class passengers Can
Real Time Operating System: Inter-Process Communication (IPC)
") ECE3411 Fall 2015 Lecture 6c. Real Time Operating System: Inter-Process Communication (IPC) Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
ECE3411 Fall 2015 Lecture 6c. Real Time Operating System: Inter-Process Communication (IPC) Marten van Dijk, Syed Kamran Haider Department of Electrical & Computer Engineering University of Connecticut
Lecture 5: Synchronization w/locks
 Lecture 5: Synchronization w/locks CSE 120: Principles of Operating Systems Alex C. Snoeren Lab 1 Due 10/19 Threads Are Made to Share Global variables and static objects are shared Stored in the static
Lecture 5: Synchronization w/locks CSE 120: Principles of Operating Systems Alex C. Snoeren Lab 1 Due 10/19 Threads Are Made to Share Global variables and static objects are shared Stored in the static
CS/ECE 6780/5780. Al Davis
 CS/ECE 6780/5780 Al Davis Today s topics: Threads basic control block scheduling semaphores Midterm (next Tues) covers Chaps & Labs 1-5 sample on the web 1 CS 5780 Lab 5 Logistics Problem not enough interrupt
CS/ECE 6780/5780 Al Davis Today s topics: Threads basic control block scheduling semaphores Midterm (next Tues) covers Chaps & Labs 1-5 sample on the web 1 CS 5780 Lab 5 Logistics Problem not enough interrupt
Page 1. Lab 5 Logistics. Implicit Threads. Explicit Thread Semantics. Problem not enough interrupt pins CS/ECE 6780/5780. Al Davis
 Lab 5 Logistics CS/ECE 6780/5780 Al Davis Today s topics: Threads basic control block scheduling semaphores Midterm (next Tues) covers Chaps & Labs 1-5 sample on the web Problem not enough interrupt pins
Lab 5 Logistics CS/ECE 6780/5780 Al Davis Today s topics: Threads basic control block scheduling semaphores Midterm (next Tues) covers Chaps & Labs 1-5 sample on the web Problem not enough interrupt pins
Chapter 6: Process Synchronization. Operating System Concepts 9 th Edit9on
 Chapter 6: Process Synchronization Operating System Concepts 9 th Edit9on Silberschatz, Galvin and Gagne 2013 Objectives To present the concept of process synchronization. To introduce the critical-section
Chapter 6: Process Synchronization Operating System Concepts 9 th Edit9on Silberschatz, Galvin and Gagne 2013 Objectives To present the concept of process synchronization. To introduce the critical-section
SAMPLE MIDTERM QUESTIONS
 SAMPLE MIDTERM QUESTIONS CS 143A Notes: 1. These questions are just for you to have some questions to practice. 2. There is no guarantee that there will be any similarities between these questions and
SAMPLE MIDTERM QUESTIONS CS 143A Notes: 1. These questions are just for you to have some questions to practice. 2. There is no guarantee that there will be any similarities between these questions and
Student Name:.. Student ID... Course Code: CSC 227 Course Title: Semester: Fall Exercises Cover Sheet:
 King Saud University College of Computer and Information Sciences Computer Science Department Course Code: CSC 227 Course Title: Operating Systems Semester: Fall 2016-2017 Exercises Cover Sheet: Final
King Saud University College of Computer and Information Sciences Computer Science Department Course Code: CSC 227 Course Title: Operating Systems Semester: Fall 2016-2017 Exercises Cover Sheet: Final
Exam TI2720-C/TI2725-C Embedded Software
 Exam TI2720-C/TI2725-C Embedded Software Wednesday April 16 2014 (18.30-21.30) Koen Langendoen In order to avoid misunderstanding on the syntactical correctness of code fragments in this examination, we
Exam TI2720-C/TI2725-C Embedded Software Wednesday April 16 2014 (18.30-21.30) Koen Langendoen In order to avoid misunderstanding on the syntactical correctness of code fragments in this examination, we
Chapters 5 and 6 Concurrency
 Operating Systems: Internals and Design Principles, 6/E William Stallings Chapters 5 and 6 Concurrency Patricia Roy Manatee Community College, Venice, FL 2008, Prentice Hall Concurrency When several processes/threads
Operating Systems: Internals and Design Principles, 6/E William Stallings Chapters 5 and 6 Concurrency Patricia Roy Manatee Community College, Venice, FL 2008, Prentice Hall Concurrency When several processes/threads
CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring Lecture 8: Semaphores, Monitors, & Condition Variables
 CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring 2004 Lecture 8: Semaphores, Monitors, & Condition Variables 8.0 Main Points: Definition of semaphores Example of use
CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring 2004 Lecture 8: Semaphores, Monitors, & Condition Variables 8.0 Main Points: Definition of semaphores Example of use
CSE Traditional Operating Systems deal with typical system software designed to be:
 CSE 6431 Traditional Operating Systems deal with typical system software designed to be: general purpose running on single processor machines Advanced Operating Systems are designed for either a special
CSE 6431 Traditional Operating Systems deal with typical system software designed to be: general purpose running on single processor machines Advanced Operating Systems are designed for either a special
Process Synchronization: Semaphores. CSSE 332 Operating Systems Rose-Hulman Institute of Technology
 Process Synchronization: Semaphores CSSE 332 Operating Systems Rose-Hulman Institute of Technology Critical-section problem solution 1. Mutual Exclusion - If process Pi is executing in its critical section,
Process Synchronization: Semaphores CSSE 332 Operating Systems Rose-Hulman Institute of Technology Critical-section problem solution 1. Mutual Exclusion - If process Pi is executing in its critical section,
Multitasking / Multithreading system Supports multiple tasks
 Tasks and Intertask Communication Introduction Multitasking / Multithreading system Supports multiple tasks As we ve noted Important job in multitasking system Exchanging data between tasks Synchronizing
Tasks and Intertask Communication Introduction Multitasking / Multithreading system Supports multiple tasks As we ve noted Important job in multitasking system Exchanging data between tasks Synchronizing
Homework Assignment #5
 Homework Assignment #5 Question 1: Scheduling a) Which of the following scheduling algorithms could result in starvation? For those algorithms that could result in starvation, describe a situation in which
Homework Assignment #5 Question 1: Scheduling a) Which of the following scheduling algorithms could result in starvation? For those algorithms that could result in starvation, describe a situation in which
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW
 REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
Precept 3: Preemptive Scheduler. COS 318: Fall 2018
 Precept 3: Preemptive Scheduler COS 318: Fall 2018 Project 3 Schedule Precept: Monday 10/15, 7:30pm (You are here) Design Review: Monday 10/22, 3-7pm Due: Sunday 11/04, 11:55pm Project 3 Overview Goal:
Precept 3: Preemptive Scheduler COS 318: Fall 2018 Project 3 Schedule Precept: Monday 10/15, 7:30pm (You are here) Design Review: Monday 10/22, 3-7pm Due: Sunday 11/04, 11:55pm Project 3 Overview Goal:
Review. Preview. Three Level Scheduler. Scheduler. Process behavior. Effective CPU Scheduler is essential. Process Scheduling
 Review Preview Mutual Exclusion Solutions with Busy Waiting Test and Set Lock Priority Inversion problem with busy waiting Mutual Exclusion with Sleep and Wakeup The Producer-Consumer Problem Race Condition
Review Preview Mutual Exclusion Solutions with Busy Waiting Test and Set Lock Priority Inversion problem with busy waiting Mutual Exclusion with Sleep and Wakeup The Producer-Consumer Problem Race Condition
Chapter 6: Process Synchronization
 Module 6: Process Synchronization Chapter 6: Process Synchronization Background! The Critical-Section Problem! Peterson s Solution! Synchronization Hardware! Semaphores! Classic Problems of Synchronization!
Module 6: Process Synchronization Chapter 6: Process Synchronization Background! The Critical-Section Problem! Peterson s Solution! Synchronization Hardware! Semaphores! Classic Problems of Synchronization!