ROS - LESSON 2. Curso Development environment setup. ROS packages structure. ROS Integration with Eclipse. Writing your first Node
|
|
|
- Rudolph Morris
- 5 years ago
- Views:
Transcription
1 Curso Development environment setup ROS packages structure ROS Integration with Eclipse JUAN CARLOS ALVAREZ Writing your first Node Running and debugging ROS - LESSON 2
2 ROS DEVELOPMENT SETUP ROS DEVELOPMENT SETUP Create a new catkin workspace Create a new ROS package Download and configure Eclipse Create Eclipse project file for your package Import package into Eclipse Write the code Update the make file Build the package
3
4 TEXTO CATKIN WORKS PACE LAYOUT
5 TEXTO CREATING & BUILDING A CATKIN WORKSPACE $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace catkin_make command builds the workspace $ cd ~/catkin_ws $ catkin_make
6
7 TEXTO COMMON FILES AND DIRECTORIES
8 TEXTO THE PACKAGE MANIFEST
9 TEXTO THE PACKAGE MANIFEST
10 TEXTO CREATING A ROS PACKAGE Change to the source directory of the workspace $ cd ~/catkin_ws/src catkin_create_pkg creates a new package with the specified dependencies $ catkin_create_pkg <package_name> [depend1] [depend2] [depend3] For example, create a first_pkg package: $ catkin_create_pkg first_pkg std_msgs rospy roscpp
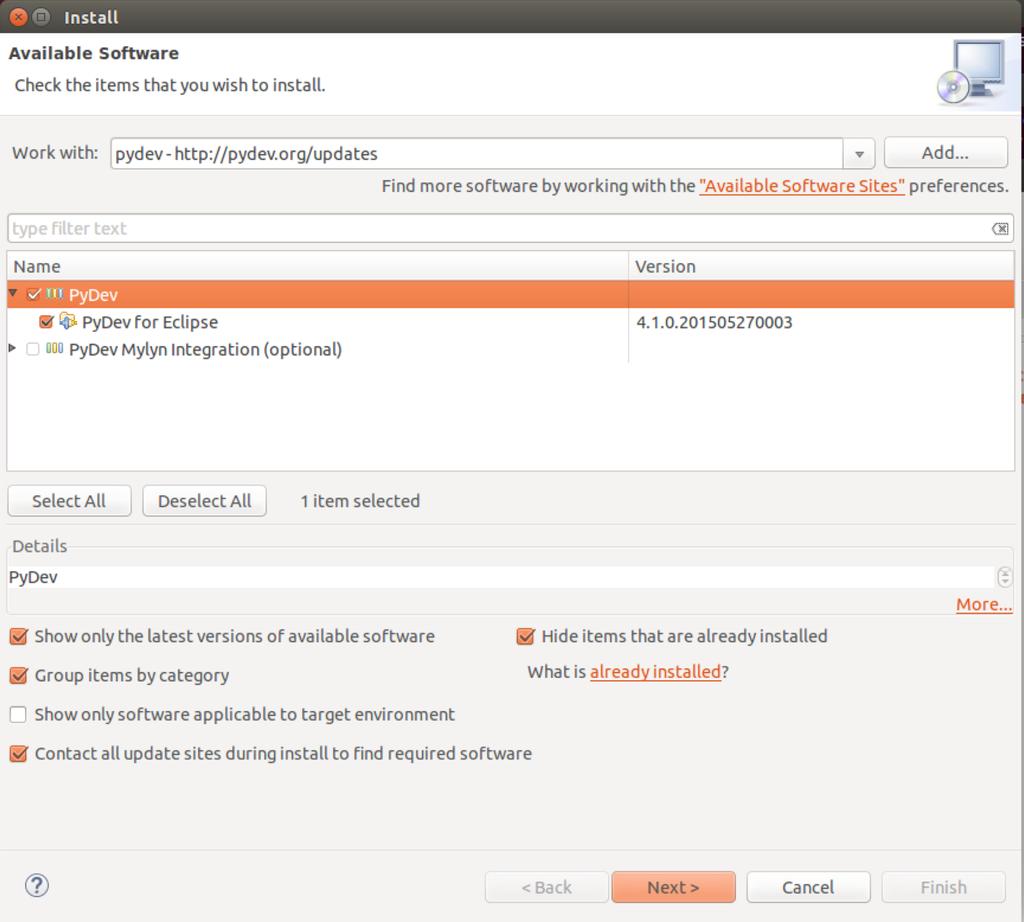
11 ECLIPSE WITH ROS ECLIPSE WITH ROS: INSTALLING Make sure JVM is installed $sudo apt-get install default-jre Download eclipse IDE for C/C++ developers from Latest version of the file is: eclipse-cpp-luna-sr1-linux-gtk-x86_64.tar.gz Extract eclipse into a folder of your choice Move eclipse to the /opt folder. $sudo mv eclipse /opt Create a link to it so it can be used by all users $sudo ln -s /opt/eclipse/eclipse /usr/bin/eclipse
12 ECLIPSE WITH ROS INSTALLING ECLIPSE Make an entry in the Unity Dash for easier access $sudo gedit /usr/share/applications/eclipse.desktop [Desktop Entry] Name=Eclipse Type=Application Exec=bash -i -c "/opt/eclipse/eclipse" Terminal=false Icon=/opt/eclipse/icon.xpm Comment=Integrated Development Environment NoDisplay=false Categories=Development;IDE Name[en]=eclipse.desktop The bash i - c command will cause your IDE's launcher icon to load your ROSsourced shell environment before launching eclipse
13 ECLIPSE WITH ROS MAKE ECLIPSE PROJECT FILES Go to workspace directory and run catkin_make with options to generate eclipse project files: $ cd ~/catkin_ws $ catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles" The project files will be generated in ~/catkin_ws/build

14 ECLIPSE WITH ROS IMPORT THE PROJECT INTO ECLIPSE Now start Eclipse Choose catkin_ws folder as the workspace folder

15 ECLIPSE WITH ROS IMPORT THE PROJECT INTO ECLIPSE Choose File --> Import --> General --> Existing Projects into Workspace

16 ECLIPSE WITH ROS IMPORT THE PROJECT INTO ECLIPSE Now import the project from the ~/catkin_ws/build folder

17 ECLIPSE WITH ROS FIX PREPROCESSOR INCLUDE PATHS By default, the intellisense in Eclipse won t recognize the system header files (like <string>). To fix that: Go to Project Properties --> C/C++ General --> Preprocessor Include Paths, Macros, etc. --> Providers tab Check CDT GCC Builtin Compiler Settings [Shared]

18 ECLIPSE WITH ROS FIX PREPROCESSOR INCLUDE PATHS After that rebuild the C/C++ index by Right click on project -> Index -> Rebuild
19 ECLIPSE WITH ROS PROJECT STRUCTURE Eclipse provides a link "Source directory" within the project so that you can edit the source code

20 ECLIPSE WITH ROS ADD NEW SOURCE FILE Right click on src and select New > Source File, and create a file named hello.cpp
")
21 ECLIPSE WITH ROS CODE COMPLETION Use Eclipse standard shortcuts to get code completion (i.e., Ctrl+Space)
22
23
24 TEXTO ROS::INIT & ROS::NODEHANDLE & ROS::RATE A version of ros::init() must be called before using any of the rest of the ROS system ros::init(argc, argv, "Node name"); Create a handle to the main access point node: ros::nodehandle node; A class to help run loops at a desired frequency. ros::rate loop_rate(10);
25 TEXTO ROS::OK() Call ros::ok() to check if the node should continue running ros::ok() will return false if: a SIGINT is received (Ctrl-C) we have been kicked off the network by another node with the same name ros::shutdown() has been called by another part of the application. all ros::nodehandles have been destroyed
26 TEXTO ROS DEBUG MESSAGES ROS_INFO prints an informative message ROS_INFO( "My INFO message." ); All messages are printed with their level and the current timestamp [ INFO] [ ]: My INFO message. This function allows parameters as in printf: ROS_INFO("My INFO message with argument: %f", val );
27 TEXTO C++ FIRST NODE EXAMPLE /* * hello.cpp ; Created on: Nov 1, 2014 ; Author: Roi Yehoshua */ #include "ros/ros.h" int main(int argc, char **argv) { ros::init(argc, argv, "hello"); ros::nodehandle nh; ros::rate loop_rate(10); int count = 0; while (ros::ok()) // Keep spinning loop until user presses Ctrl+C { ROS_INFO_STREAM("hello world" << count); ros::spinonce(); // Allow ROS to process incoming messages loop_rate.sleep(); // Sleep for the rest of the cycle count++; } return 0; }
28 TEXTO CMAKELISTS. TXT cmake_minimum_required(version 2.8.3) project(first_pkg) ## Find catkin macros and libraries find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs) ## Declare ROS messages and services # add_message_files(files Message1.msg Message2.msg) # add_service_files(files Service1.srv Service2.srv) ## Generate added messages and services # generate_messages(dependencies std_msgs) ## Declare catkin package catkin_package() ## Specify additional locations of header files include_directories(${catkin_include_dirs}) ## Declare a cpp executable add_executable(hello src/hello.cpp) ## Specify libraries to link a library or executable target against target_link_libraries(hello ${catkin_libraries})
29 TEXTO BUILDING YOUR NODES To compile the project in Eclipse press Ctrl-B To build the package in the terminal call catkin_make

30 RUNNING THE NODE FROM TERMINAL $ cd ~/catkin_ws $ source./devel/setup.bash $ rosrun first_pkg hello
31 TEXTO RUNNING THE NODE INSIDE ECLIPSE Create a new launch configuration, by clicking on Run --> Run configurations... --> C/C++ Application (double click or click on New). Select the correct binary on the main tab (use the Browse button) ~/catkin_ws/devel/lib/first_pkg/hello Make sure roscore is running in a terminal Click Run

32 RUNNING THE NODE INSIDE ECLIPSE

33 RUNNING THE NODE INSIDE ECLIPSE
34 DEBUGGING DEBUGGING To enable debugging, you should first execute the following command in catkin_ws/build: $ cmake../src -DCMAKE_BUILD_TYPE=Debug Restart Eclipse Then you will be able to use the standard debugging tools in Eclipse

35 DEBUGGING
36 TEXTO HOMEWORK (NOT FOR SUBMISSION) Install Eclipse and integrate it with ROS Create a new ROS package called "timer_package" Create a node in this package called "timer_node" The node should print to the console the current time every 1 second
CSCI 473/573 Human-Centered Robotics. Special Thanks: The slides of ROS basics are adapted from Roi Yehoshua
 CSCI 473/573 Human-Centered Robotics Special Thanks: The slides of ROS basics are adapted from Roi Yehoshua ROS Introduction Main concepts Basic commands 2 What is ROS? ROS is an open-source robot operating
CSCI 473/573 Human-Centered Robotics Special Thanks: The slides of ROS basics are adapted from Roi Yehoshua ROS Introduction Main concepts Basic commands 2 What is ROS? ROS is an open-source robot operating
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Publishing messages to topics Subscribing to topics Differential drive robots Sending velocity commands from code roslaunch 2 ros::publisher Manages
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Publishing messages to topics Subscribing to topics Differential drive robots Sending velocity commands from code roslaunch 2 ros::publisher Manages
ROS BASICS. Sören Schwertfeger / 师泽仁
 ROS BASICS Sören Schwertfeger / 师泽仁 https://robotics.shanghaitech.edu.cn With lots of material from last years summer school by Ling Chen lcheno@shu.edu.cn (Shanghai University) and with material by Levi
ROS BASICS Sören Schwertfeger / 师泽仁 https://robotics.shanghaitech.edu.cn With lots of material from last years summer school by Ling Chen lcheno@shu.edu.cn (Shanghai University) and with material by Levi
PUBLISHER-SUBSCRIBER ROBOTICS
 PUBLISHER-SUBSCRIBER ROBOTICS INSIDE THE NODE Timers Service provider Main loop Subscribers Publisher Parameters & Data WRITING A PUBLISHER NODE First create a package inside you src folder: $ catkin_create_pkg
PUBLISHER-SUBSCRIBER ROBOTICS INSIDE THE NODE Timers Service provider Main loop Subscribers Publisher Parameters & Data WRITING A PUBLISHER NODE First create a package inside you src folder: $ catkin_create_pkg
Tutorial on Robot Operating System (ROS)
") Tutorial on Robot Operating System (ROS) Mayank Mittal Indian Institute of Technology, Kanpur mayankm@iitk.ac.in June 7, 2018 Mayank Mittal (IIT Kanpur) Tutorial on ROS June 7, 2018 1 / 20 Requirements
Tutorial on Robot Operating System (ROS) Mayank Mittal Indian Institute of Technology, Kanpur mayankm@iitk.ac.in June 7, 2018 Mayank Mittal (IIT Kanpur) Tutorial on ROS June 7, 2018 1 / 20 Requirements
An Introduction to ROS. Or how to write code that starts fires!
 An Introduction to ROS Or how to write code that starts fires! A Conceptual Overview Nodes, Topics and Messages What is ROS? Stands for Robotics Operating System NOT an Operating System. Provides many
An Introduction to ROS Or how to write code that starts fires! A Conceptual Overview Nodes, Topics and Messages What is ROS? Stands for Robotics Operating System NOT an Operating System. Provides many
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1. Guillermo Castillo (Wei Zhang)
") ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
A Gentle Introduction to ROS
 A Gentle Introduction to ROS Chapter: Writing ROS programs Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208
A Gentle Introduction to ROS Chapter: Writing ROS programs Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208
Installation of the PLCnext Technology SDK and Eclipse
 Installation of the PLCnext Technology SDK and Eclipse Frank PLCnext Team A software development kit (SDK) is mandatory in order to use C++ applications with PLCnext Technology. This kit is provided by
Installation of the PLCnext Technology SDK and Eclipse Frank PLCnext Team A software development kit (SDK) is mandatory in order to use C++ applications with PLCnext Technology. This kit is provided by
Assignment 1. Please follow these instructions to install ROS; you will want to install the ROS Indigo Igloo (rosindigo-desktop-full
 Assignment 1 The objective of this assignment is for you to become familiar with the Robot Operating System (ROS) software, which you will be using in future assignments to program various algorithms for
Assignment 1 The objective of this assignment is for you to become familiar with the Robot Operating System (ROS) software, which you will be using in future assignments to program various algorithms for
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Stage simulator Reading laser sensor data Writing a simple walker Your first assignment ROS Stage Simulator http://wiki.ros.org/simulator_stage
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Stage simulator Reading laser sensor data Writing a simple walker Your first assignment ROS Stage Simulator http://wiki.ros.org/simulator_stage
Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart
 Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart O Reilly December 2015 CHAPTER 23 Using C++ in ROS We chose to use Python for this book for a number of reasons. First, it s
Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart O Reilly December 2015 CHAPTER 23 Using C++ in ROS We chose to use Python for this book for a number of reasons. First, it s
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
ROS Robot Operating System
 ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Installing Packages / Nodes Parameters Messages
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Installing Packages / Nodes Parameters Messages
Parallel Programming
 Parallel Programming Installing Eclipse Parallel Tools Platform (PTP) (Linux Distributions) Preliminaries - Install Java Author B. Wilkinson - Modification date May 29, 2015 Java is needed for the Eclipse
Parallel Programming Installing Eclipse Parallel Tools Platform (PTP) (Linux Distributions) Preliminaries - Install Java Author B. Wilkinson - Modification date May 29, 2015 Java is needed for the Eclipse
Introduction to Robot Operating System (ROS) using C++
 using C++") 1/22 1 Introduction to Robot Operating System (ROS) using C++ Mahmoud Abdul Galil Tutorial-2 These slides are based on the online ROS Wiki documentation 2/22 2 ros-example-1 Cont'd: CMakeLists.txt lwe
1/22 1 Introduction to Robot Operating System (ROS) using C++ Mahmoud Abdul Galil Tutorial-2 These slides are based on the online ROS Wiki documentation 2/22 2 ros-example-1 Cont'd: CMakeLists.txt lwe
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
Introduction to Supercomputing
 Introduction to Supercomputing TMA4280 Introduction to UNIX environment and tools 0.1 Getting started with the environment and the bash shell interpreter Desktop computers are usually operated from a graphical
Introduction to Supercomputing TMA4280 Introduction to UNIX environment and tools 0.1 Getting started with the environment and the bash shell interpreter Desktop computers are usually operated from a graphical
ROS: Robot Operating System. Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014
 ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
Laurea magistrale in ingegneria e scienze informatiche. Corso di Robotica Parte di Laboratorio. + Docente: Domenico Daniele Bloisi.
 Laurea magistrale in ingegneria e scienze informatiche Corso di Robotica Parte di Laboratorio + Docente: Domenico Daniele Bloisi Novembre 2017 ROS + git Esempio pratico 1. creare un nodo ROS 2. creare
Laurea magistrale in ingegneria e scienze informatiche Corso di Robotica Parte di Laboratorio + Docente: Domenico Daniele Bloisi Novembre 2017 ROS + git Esempio pratico 1. creare un nodo ROS 2. creare
data source/sink to which messages are posted to or subscribed from. a topic consists of a namespace/topicname.
 AARNET.org sources deb http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main deb-src http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main ROS Installing sudo apt-get install ros-hydro-desktop-full
AARNET.org sources deb http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main deb-src http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main ROS Installing sudo apt-get install ros-hydro-desktop-full
Download, Install and Setup the Linux Development Workload Create a New Linux Project Configure a Linux Project Configure a Linux CMake Project
 Table of Contents Download, Install and Setup the Linux Development Workload Create a New Linux Project Configure a Linux Project Configure a Linux CMake Project Connect to Your Remote Linux Computer Deploy,
Table of Contents Download, Install and Setup the Linux Development Workload Create a New Linux Project Configure a Linux Project Configure a Linux CMake Project Connect to Your Remote Linux Computer Deploy,
CMPT 300. Operating Systems. Brief Intro to UNIX and C
 CMPT 300 Operating Systems Brief Intro to UNIX and C Outline Welcome Review Questions UNIX basics and Vi editor Using SSH to remote access Lab2(4214) Compiling a C Program Makefile Basic C/C++ programming
CMPT 300 Operating Systems Brief Intro to UNIX and C Outline Welcome Review Questions UNIX basics and Vi editor Using SSH to remote access Lab2(4214) Compiling a C Program Makefile Basic C/C++ programming
Assignment 1. First type the following in a terminal: (for your own benefits, make sure you understand what each of these lines is doing)
") Assignment 1 1. (30%) Creating a random walk algorithm Now that you are familiar with the fundamentals of ROS and the stage simulator, you will learn to create a simple ROS node that will drive the robot
Assignment 1 1. (30%) Creating a random walk algorithm Now that you are familiar with the fundamentals of ROS and the stage simulator, you will learn to create a simple ROS node that will drive the robot
Lab 1: First Steps in C++ - Eclipse
 Lab 1: First Steps in C++ - Eclipse Step Zero: Select workspace 1. Upon launching eclipse, we are ask to chose a workspace: 2. We select a new workspace directory (e.g., C:\Courses ): 3. We accept the
Lab 1: First Steps in C++ - Eclipse Step Zero: Select workspace 1. Upon launching eclipse, we are ask to chose a workspace: 2. We select a new workspace directory (e.g., C:\Courses ): 3. We accept the
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda ROS transformation system Writing a tf broadcaster Writing a tf listener What is tf? A robotic system typically has many coordinate frames that
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda ROS transformation system Writing a tf broadcaster Writing a tf listener What is tf? A robotic system typically has many coordinate frames that
Module 3: Working with C/C++
 Module 3: Working with C/C++ Objective Learn basic Eclipse concepts: Perspectives, Views, Learn how to use Eclipse to manage a remote project Learn how to use Eclipse to develop C programs Learn how to
Module 3: Working with C/C++ Objective Learn basic Eclipse concepts: Perspectives, Views, Learn how to use Eclipse to manage a remote project Learn how to use Eclipse to develop C programs Learn how to
Eclipse CDT Tutorial. Eclipse CDT Homepage: Tutorial written by: James D Aniello
 Eclipse CDT Tutorial Eclipse CDT Homepage: http://www.eclipse.org/cdt/ Tutorial written by: James D Aniello Hello and welcome to the Eclipse CDT Tutorial. This tutorial will teach you the basics of the
Eclipse CDT Tutorial Eclipse CDT Homepage: http://www.eclipse.org/cdt/ Tutorial written by: James D Aniello Hello and welcome to the Eclipse CDT Tutorial. This tutorial will teach you the basics of the
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Installing Eclipse CDT and MinGW
 Installing Eclipse CDT and MinGW Downloading and Installing Eclipse CDT 1. Go to the webpage: http://www.eclipse.org/cdt/ 2. Click the Downloads tab, and scroll down to the CDT 8.0.2 for Eclipse Indigo
Installing Eclipse CDT and MinGW Downloading and Installing Eclipse CDT 1. Go to the webpage: http://www.eclipse.org/cdt/ 2. Click the Downloads tab, and scroll down to the CDT 8.0.2 for Eclipse Indigo
ROS tf System February, Janyl Jumadinova
 ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
LOITOR Visual-Inertial Camera. Instruction manual V0.6
 LOITOR Visual-Inertial Camera Instruction manual V0.6 Loitor Visual Inertial Camera is a general vision sensor designed for visual algorithm developers.providing abundant hardware control interface and
LOITOR Visual-Inertial Camera Instruction manual V0.6 Loitor Visual Inertial Camera is a general vision sensor designed for visual algorithm developers.providing abundant hardware control interface and
Exercise 1: Basic Tools
 Exercise 1: Basic Tools This exercise is created so everybody can learn the basic tools we will use during this course. It is really more like a tutorial than an exercise and, you are not required to submit
Exercise 1: Basic Tools This exercise is created so everybody can learn the basic tools we will use during this course. It is really more like a tutorial than an exercise and, you are not required to submit
COSE222 Computer Architecture
 COSE222 Computer Architecture Cross-Compilation for MIPS using Eclipse - Updated on Sep. 10, 2017 Here, we are going to set up an environment to cross-compile C and/or MIPS Assembly code with Eclipse to
COSE222 Computer Architecture Cross-Compilation for MIPS using Eclipse - Updated on Sep. 10, 2017 Here, we are going to set up an environment to cross-compile C and/or MIPS Assembly code with Eclipse to
ROS Services. Request/response communication between nodes is realized with services
 ROS Services /response communication between nodes is realized with services The service server advertises the service The service client accesses this service Similar in structure to messages, services
ROS Services /response communication between nodes is realized with services The service server advertises the service The service client accesses this service Similar in structure to messages, services
CS 326 Operating Systems C Programming. Greg Benson Department of Computer Science University of San Francisco
 CS 326 Operating Systems C Programming Greg Benson Department of Computer Science University of San Francisco Why C? Fast (good optimizing compilers) Not too high-level (Java, Python, Lisp) Not too low-level
CS 326 Operating Systems C Programming Greg Benson Department of Computer Science University of San Francisco Why C? Fast (good optimizing compilers) Not too high-level (Java, Python, Lisp) Not too low-level
Using Eclipse for C, MPI, and Suzaku
 Using Eclipse for C, MPI, and Suzaku Modification date May 30, 2015 B. Wilkinson General. Eclipse is an IDE with plugs for various programming environments including Java and C. Eclipse-PTP (Eclipse with
Using Eclipse for C, MPI, and Suzaku Modification date May 30, 2015 B. Wilkinson General. Eclipse is an IDE with plugs for various programming environments including Java and C. Eclipse-PTP (Eclipse with
Android SDK under Linux
 Android SDK under Linux Jean-Francois Messier Android Outaouais jf@messier.ca Abstract This is a tutorial about installing the various components required to have an actual Android development station
Android SDK under Linux Jean-Francois Messier Android Outaouais jf@messier.ca Abstract This is a tutorial about installing the various components required to have an actual Android development station
Robot Vision Systems Lecture 10: ROS Basics
 Computer Vision Laboratory Robot Vision Systems Lecture 10: ROS Basics Michael Felsberg michael.felsberg@liu.se ROS Topics turtlesim_node subscribes to the same topic that turtle_teleop_key publishes to
Computer Vision Laboratory Robot Vision Systems Lecture 10: ROS Basics Michael Felsberg michael.felsberg@liu.se ROS Topics turtlesim_node subscribes to the same topic that turtle_teleop_key publishes to
The transition from ROS 1 to ROS 2
 The transition from ROS 1 to ROS 2 By Vincenzo DiLuoffo, William R. Michalson, Berk Sunar Worcester Polytechnic Institute (WPI) vdiluoffo, sunar, wrm @wpi.edu Date:06/05/17 06/05/17 1 Table of Contents
The transition from ROS 1 to ROS 2 By Vincenzo DiLuoffo, William R. Michalson, Berk Sunar Worcester Polytechnic Institute (WPI) vdiluoffo, sunar, wrm @wpi.edu Date:06/05/17 06/05/17 1 Table of Contents
Applied Informatics POCO PRO C++ Frameworks
 Applied Informatics POCO PRO C++ Frameworks Getting Started Guide Version 1.10 Purpose of This Document This document guides developers interested in the POCO PRO C++ Frameworks by Applied Informatics
Applied Informatics POCO PRO C++ Frameworks Getting Started Guide Version 1.10 Purpose of This Document This document guides developers interested in the POCO PRO C++ Frameworks by Applied Informatics
AN 834: Developing for the Intel HLS Compiler with an IDE
 AN 834: Developing for the Intel HLS Compiler with an IDE Subscribe Send Feedback Latest document on the web: PDF HTML Contents Contents 1 Developing for the Intel HLS Compiler with an Eclipse* IDE...
AN 834: Developing for the Intel HLS Compiler with an IDE Subscribe Send Feedback Latest document on the web: PDF HTML Contents Contents 1 Developing for the Intel HLS Compiler with an Eclipse* IDE...
auros Documentation and Interface Specification
 auros Documentation and Interface Specification Release 0.0.1 University of Manchester GAMMA Programme February 20, 2015 Contents 1 Introduction 1 1.1 About this Document...........................................
auros Documentation and Interface Specification Release 0.0.1 University of Manchester GAMMA Programme February 20, 2015 Contents 1 Introduction 1 1.1 About this Document...........................................
Introduction to ROS. COMP3431 Robot Software Architectures
 Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
ECM583 Special Topics in Computer Systems
 ECM583 Special Topics in Computer Systems Lab 2. ARM Cross-Compilation using Eclipse In this lab, we are going to set up an environment to cross-compile ARM code (C and/or Assembly code) under Eclipse.
ECM583 Special Topics in Computer Systems Lab 2. ARM Cross-Compilation using Eclipse In this lab, we are going to set up an environment to cross-compile ARM code (C and/or Assembly code) under Eclipse.
CSE 351. Introduction & Course Tools
 CSE 351 Introduction & Course Tools Meet Your TA TA Name Interesting information examples: Where you are from Year in school Hobbies Unique talents Introductions Pick an interesting (but quick) ice breaker
CSE 351 Introduction & Course Tools Meet Your TA TA Name Interesting information examples: Where you are from Year in school Hobbies Unique talents Introductions Pick an interesting (but quick) ice breaker
UNic Eclipse Mini Tutorial (Updated 06/09/2012) Prepared by Harald Gjermundrod
 Prepared by Harald Gjermundrod") Page 1 of 19 UNic Eclipse Mini Tutorial (Updated 06/09/2012) Prepared By: Harald Gjermundrod Table of Contents 1 EASY INSTALLATION... 2 1.1 DOWNLOAD... 2 1.2 INSTALLING... 2 2 CUSTOMIZED INSTALLATION...
Page 1 of 19 UNic Eclipse Mini Tutorial (Updated 06/09/2012) Prepared By: Harald Gjermundrod Table of Contents 1 EASY INSTALLATION... 2 1.1 DOWNLOAD... 2 1.2 INSTALLING... 2 2 CUSTOMIZED INSTALLATION...
Introduction. Key features and lab exercises to familiarize new users to the Visual environment
 Introduction Key features and lab exercises to familiarize new users to the Visual environment January 1999 CONTENTS KEY FEATURES... 3 Statement Completion Options 3 Auto List Members 3 Auto Type Info
Introduction Key features and lab exercises to familiarize new users to the Visual environment January 1999 CONTENTS KEY FEATURES... 3 Statement Completion Options 3 Auto List Members 3 Auto Type Info
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2010
 CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2010 The process of creating a project with Microsoft Visual Studio 2010.Net is similar to the process in Visual
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2010 The process of creating a project with Microsoft Visual Studio 2010.Net is similar to the process in Visual
ROS Qt Creator Plug-in. Release
 ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 FAQ 13 3 Users Help 15 4 Developers Help 23 5 Video Tutorials 25 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki
ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 FAQ 13 3 Users Help 15 4 Developers Help 23 5 Video Tutorials 25 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki
A Gentle Introduction to ROS
 A Gentle Introduction to ROS Chapter: Services Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208 http://www.cse.sc.edu/~jokane
A Gentle Introduction to ROS Chapter: Services Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208 http://www.cse.sc.edu/~jokane
Problem Set 1: Unix Commands 1
 Problem Set 1: Unix Commands 1 WARNING: IF YOU DO NOT FIND THIS PROBLEM SET TRIVIAL, I WOULD NOT RECOMMEND YOU TAKE THIS OFFERING OF 300 AS YOU DO NOT POSSESS THE REQUISITE BACKGROUND TO PASS THE COURSE.
Problem Set 1: Unix Commands 1 WARNING: IF YOU DO NOT FIND THIS PROBLEM SET TRIVIAL, I WOULD NOT RECOMMEND YOU TAKE THIS OFFERING OF 300 AS YOU DO NOT POSSESS THE REQUISITE BACKGROUND TO PASS THE COURSE.
How I Learned to Stop Reinventing and Love the Wheels. with (home/hackerspace) robotics
 robotics") How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
EECS Software Tools. Lab 2 Tutorial: Introduction to UNIX/Linux. Tilemachos Pechlivanoglou
 EECS 2031 - Software Tools Lab 2 Tutorial: Introduction to UNIX/Linux Tilemachos Pechlivanoglou (tipech@eecs.yorku.ca) Sep 22 & 25, 2017 Material marked with will be in your exams Sep 22 & 25, 2017 Introduction
EECS 2031 - Software Tools Lab 2 Tutorial: Introduction to UNIX/Linux Tilemachos Pechlivanoglou (tipech@eecs.yorku.ca) Sep 22 & 25, 2017 Material marked with will be in your exams Sep 22 & 25, 2017 Introduction
Course Updates. Website set-up at
 Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2005
 CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2005 The process of creating a project with Microsoft Visual Studio 2005.Net is similar to the process in Visual
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2005 The process of creating a project with Microsoft Visual Studio 2005.Net is similar to the process in Visual
Laboratory Assignment #4 Debugging in Eclipse CDT 1
 Lab 4 (10 points) November 20, 2013 CS-2301, System Programming for Non-majors, B-term 2013 Objective Laboratory Assignment #4 Debugging in Eclipse CDT 1 Due: at 11:59 pm on the day of your lab session
Lab 4 (10 points) November 20, 2013 CS-2301, System Programming for Non-majors, B-term 2013 Objective Laboratory Assignment #4 Debugging in Eclipse CDT 1 Due: at 11:59 pm on the day of your lab session
Installing Eclipse (C++/Java)
") Installing Eclipse (C++/Java) The 2017 suite of text-based languages, Java and C++, utilize the current version of Eclipse as a development environment. The FRC specific tools for the chosen language are
Installing Eclipse (C++/Java) The 2017 suite of text-based languages, Java and C++, utilize the current version of Eclipse as a development environment. The FRC specific tools for the chosen language are
ROS+GAZEBO. Part 1.
 ROS+GAZEBO Part 1 www.cogniteam.com July 2012 ROS (Robotic Operating System ) Software framework for robot software development developed in 2007 under the name switchyard by the Stanford Artificial Intelligence
ROS+GAZEBO Part 1 www.cogniteam.com July 2012 ROS (Robotic Operating System ) Software framework for robot software development developed in 2007 under the name switchyard by the Stanford Artificial Intelligence
Building and Running a Simple UML RT Model in RSARTE
 Building and Running a Simple UML RT Model in RSARTE Mattias Mohlin Senior Software Architect IBM In this tutorial we will learn how to use RSARTE for transforming a simple UML RT model into C++ code compiling
Building and Running a Simple UML RT Model in RSARTE Mattias Mohlin Senior Software Architect IBM In this tutorial we will learn how to use RSARTE for transforming a simple UML RT model into C++ code compiling
Manual Eclipse CDT Mac OS Snow Leopard
 UNVIERSITY OF VICTORIA Manual Eclipse CDT Mac OS Snow Leopard Installation & Demonstration Guide Przemek Lach 9/3/2013 This guide shows how to use install Eclipse and C- Compiler and how to test the setup
UNVIERSITY OF VICTORIA Manual Eclipse CDT Mac OS Snow Leopard Installation & Demonstration Guide Przemek Lach 9/3/2013 This guide shows how to use install Eclipse and C- Compiler and how to test the setup
catkin_tools Documentation
 catkin_tools Documentation Release 0.0.0 William Woodall April 14, 2016 Main Overview 1 Installing catkin_tools 1 1.1 Installing on Ubuntu with apt-get.................................... 1 1.2 Installing
catkin_tools Documentation Release 0.0.0 William Woodall April 14, 2016 Main Overview 1 Installing catkin_tools 1 1.1 Installing on Ubuntu with apt-get.................................... 1 1.2 Installing
2 Compiling a C program
 2 Compiling a C program This chapter describes how to compile C programs using gcc. Programs can be compiled from a single source file or from multiple source files, and may use system libraries and header
2 Compiling a C program This chapter describes how to compile C programs using gcc. Programs can be compiled from a single source file or from multiple source files, and may use system libraries and header
Laboratory Assignment #3 Eclipse CDT
 Lab 3 September 12, 2010 CS-2303, System Programming Concepts, A-term 2012 Objective Laboratory Assignment #3 Eclipse CDT Due: at 11:59 pm on the day of your lab session To learn to learn to use the Eclipse
Lab 3 September 12, 2010 CS-2303, System Programming Concepts, A-term 2012 Objective Laboratory Assignment #3 Eclipse CDT Due: at 11:59 pm on the day of your lab session To learn to learn to use the Eclipse
Eclipse Environment Setup
 Eclipse Environment Setup Adapted from a document from Jeffrey Miller and the CS201 team by Shiyuan Sheng. Introduction This lab document will go over the steps to install and set up Eclipse, which is
Eclipse Environment Setup Adapted from a document from Jeffrey Miller and the CS201 team by Shiyuan Sheng. Introduction This lab document will go over the steps to install and set up Eclipse, which is
Introduc)on to CMake. Ben Thomas.
on to CMake. Ben Thomas.") Introduc)on to CMake Ben Thomas b.a.thomas@ucl.ac.uk 1 Overview What is CMake? "Hello World!" demo Package management CCP SuperBuild CTest and CPack 2 What is CMake? h#p://www.cmake.com CMake is an open-source,
Introduc)on to CMake Ben Thomas b.a.thomas@ucl.ac.uk 1 Overview What is CMake? "Hello World!" demo Package management CCP SuperBuild CTest and CPack 2 What is CMake? h#p://www.cmake.com CMake is an open-source,
FX SERIES. Programmer s Guide. Embedded SDK. MN000540A01 Rev. A
 FX SERIES Embedded SDK Programmer s Guide MN000540A01 Rev. A Table of Contents About This Guide Introduction...4 Chapter Descriptions... 4 Notational Conventions...5 Related Documents and Software...5
FX SERIES Embedded SDK Programmer s Guide MN000540A01 Rev. A Table of Contents About This Guide Introduction...4 Chapter Descriptions... 4 Notational Conventions...5 Related Documents and Software...5
Working with Shell Scripting. Daniel Balagué
 Working with Shell Scripting Daniel Balagué Editing Text Files We offer many text editors in the HPC cluster. Command-Line Interface (CLI) editors: vi / vim nano (very intuitive and easy to use if you
Working with Shell Scripting Daniel Balagué Editing Text Files We offer many text editors in the HPC cluster. Command-Line Interface (CLI) editors: vi / vim nano (very intuitive and easy to use if you
Lab #1: A Quick Introduction to the Eclipse IDE
 Lab #1: A Quick Introduction to the Eclipse IDE Eclipse is an integrated development environment (IDE) for Java programming. Actually, it is capable of much more than just compiling Java programs but that
Lab #1: A Quick Introduction to the Eclipse IDE Eclipse is an integrated development environment (IDE) for Java programming. Actually, it is capable of much more than just compiling Java programs but that
Scientific Software Development with Eclipse
 Scientific Software Development with Eclipse A Best Practices for HPC Developers Webinar Gregory R. Watson ORNL is managed by UT-Battelle for the US Department of Energy Contents Downloading and Installing
Scientific Software Development with Eclipse A Best Practices for HPC Developers Webinar Gregory R. Watson ORNL is managed by UT-Battelle for the US Department of Energy Contents Downloading and Installing
Code::Blocks Student Manual
 Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Check the Desktop development with C++ in the install options. You may want to take 15 minutes to try the Hello World C++ tutorial:
 CS262 Computer Vision OpenCV 3 Configuration with Visual Studio 2017 Prof. John Magee Clark University Install Visual Studio 2017 Community Check the Desktop development with C++ in the install options.
CS262 Computer Vision OpenCV 3 Configuration with Visual Studio 2017 Prof. John Magee Clark University Install Visual Studio 2017 Community Check the Desktop development with C++ in the install options.
Cognitive Robotics ROS Introduction Matteo Matteucci
 Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
Programs. Function main. C Refresher. CSCI 4061 Introduction to Operating Systems
 Programs CSCI 4061 Introduction to Operating Systems C Program Structure Libraries and header files Compiling and building programs Executing and debugging Instructor: Abhishek Chandra Assume familiarity
Programs CSCI 4061 Introduction to Operating Systems C Program Structure Libraries and header files Compiling and building programs Executing and debugging Instructor: Abhishek Chandra Assume familiarity
ncsa eclipse internal training
 ncsa eclipse internal training This tutorial will cover the basic setup and use of Eclipse with forge.ncsa.illinois.edu. At the end of the tutorial, you should be comfortable with the following tasks:
ncsa eclipse internal training This tutorial will cover the basic setup and use of Eclipse with forge.ncsa.illinois.edu. At the end of the tutorial, you should be comfortable with the following tasks:
CSC111 Computer Science II
 CSC111 Computer Science II Lab 1 Getting to know Linux Introduction The purpose of this lab is to introduce you to the command line interface in Linux. Getting started In our labs If you are in one of
CSC111 Computer Science II Lab 1 Getting to know Linux Introduction The purpose of this lab is to introduce you to the command line interface in Linux. Getting started In our labs If you are in one of
ROS Crash-Course, Part II
 ROS Crash-Course, Part II ROS Design Patterns, C++ APIs, and Best Practices Jonathan Bohren With some information and figures adapted from http: // www. ros. org Outline 1 ROS Package & Stack Design Jonathan
ROS Crash-Course, Part II ROS Design Patterns, C++ APIs, and Best Practices Jonathan Bohren With some information and figures adapted from http: // www. ros. org Outline 1 ROS Package & Stack Design Jonathan
Developing using C on imx Developer s Kits
 Developing using C on imx Developer s Kit Developing using C on imx Developer s Kits Developing using C on imx Developer s Kits Page 2 Embedded Artists AB Davidshallsgatan 16 SE-211 45 Malmö Sweden http://www.embeddedartists.com.
Developing using C on imx Developer s Kit Developing using C on imx Developer s Kits Developing using C on imx Developer s Kits Page 2 Embedded Artists AB Davidshallsgatan 16 SE-211 45 Malmö Sweden http://www.embeddedartists.com.
PRINCIPLES OF OPERATING SYSTEMS
 PRINCIPLES OF OPERATING SYSTEMS Tutorial-1&2: C Review CPSC 457, Spring 2015 May 20-21, 2015 Department of Computer Science, University of Calgary Connecting to your VM Open a terminal (in your linux machine)
PRINCIPLES OF OPERATING SYSTEMS Tutorial-1&2: C Review CPSC 457, Spring 2015 May 20-21, 2015 Department of Computer Science, University of Calgary Connecting to your VM Open a terminal (in your linux machine)
DS-5 ARM. Using Eclipse. Version Copyright ARM. All rights reserved. ARM DUI 0480L (ID100912)
") ARM DS-5 Version 5.12 Using Eclipse Copyright 2010-2012 ARM. All rights reserved. ARM DUI 0480L () ARM DS-5 Using Eclipse Copyright 2010-2012 ARM. All rights reserved. Release Information The following
ARM DS-5 Version 5.12 Using Eclipse Copyright 2010-2012 ARM. All rights reserved. ARM DUI 0480L () ARM DS-5 Using Eclipse Copyright 2010-2012 ARM. All rights reserved. Release Information The following
Using Eclipse for Java. Using Eclipse for Java 1 / 1
 Using Eclipse for Java Using Eclipse for Java 1 / 1 Using Eclipse IDE for Java Development Download the latest version of Eclipse (Eclipse for Java Developers or the Standard version) from the website:
Using Eclipse for Java Using Eclipse for Java 1 / 1 Using Eclipse IDE for Java Development Download the latest version of Eclipse (Eclipse for Java Developers or the Standard version) from the website:
Code::Blocks Student Manual
 Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Introduction to Robot Operating System (ROS)
") Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Setting up cross compiling environment & Qt/X11 for the DXSERIES with the ELDK cross compiler
 Setting up cross compiling environment & Qt/X11 for the DXSERIES with the ELDK cross compiler Table of Contents 1 About this document... 2 2 Revision History... 2 3 Conventions... 2 4 Setting up ELDK...
Setting up cross compiling environment & Qt/X11 for the DXSERIES with the ELDK cross compiler Table of Contents 1 About this document... 2 2 Revision History... 2 3 Conventions... 2 4 Setting up ELDK...
CSE 303 Lecture 2. Introduction to bash shell. read Linux Pocket Guide pp , 58-59, 60, 65-70, 71-72, 77-80
 CSE 303 Lecture 2 Introduction to bash shell read Linux Pocket Guide pp. 37-46, 58-59, 60, 65-70, 71-72, 77-80 slides created by Marty Stepp http://www.cs.washington.edu/303/ 1 Unix file system structure
CSE 303 Lecture 2 Introduction to bash shell read Linux Pocket Guide pp. 37-46, 58-59, 60, 65-70, 71-72, 77-80 slides created by Marty Stepp http://www.cs.washington.edu/303/ 1 Unix file system structure
Oregon State University School of Electrical Engineering and Computer Science. CS 261 Recitation 1. Spring 2011
 Oregon State University School of Electrical Engineering and Computer Science CS 261 Recitation 1 Spring 2011 Outline Using Secure Shell Clients GCC Some Examples Intro to C * * Windows File transfer client:
Oregon State University School of Electrical Engineering and Computer Science CS 261 Recitation 1 Spring 2011 Outline Using Secure Shell Clients GCC Some Examples Intro to C * * Windows File transfer client:
CS 220: Introduction to Parallel Computing. Beginning C. Lecture 2
 CS 220: Introduction to Parallel Computing Beginning C Lecture 2 Today s Schedule More C Background Differences: C vs Java/Python The C Compiler HW0 8/25/17 CS 220: Parallel Computing 2 Today s Schedule
CS 220: Introduction to Parallel Computing Beginning C Lecture 2 Today s Schedule More C Background Differences: C vs Java/Python The C Compiler HW0 8/25/17 CS 220: Parallel Computing 2 Today s Schedule
TNM093 Practical Data Visualization and Virtual Reality Laboratory Platform
 November 8, 2016 1 Introduction The laboratory exercises in this course are to be conducted in an environment that might not be familiar to many of you. It is based on open source software. We use an open
November 8, 2016 1 Introduction The laboratory exercises in this course are to be conducted in an environment that might not be familiar to many of you. It is based on open source software. We use an open
Parallel Tools Platform for Judge
 Parallel Tools Platform for Judge Carsten Karbach, Forschungszentrum Jülich GmbH September 20, 2013 Abstract The Parallel Tools Platform (PTP) represents a development environment for parallel applications.
Parallel Tools Platform for Judge Carsten Karbach, Forschungszentrum Jülich GmbH September 20, 2013 Abstract The Parallel Tools Platform (PTP) represents a development environment for parallel applications.
CSCI 201 Lab 1 Environment Setup
 CSCI 201 Lab 1 Environment Setup "The journey of a thousand miles begins with one step." - Lao Tzu Introduction This lab document will go over the steps to install and set up Eclipse, which is a Java integrated
CSCI 201 Lab 1 Environment Setup "The journey of a thousand miles begins with one step." - Lao Tzu Introduction This lab document will go over the steps to install and set up Eclipse, which is a Java integrated
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2003
 CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2003 The process of creating a project with Microsoft Visual Studio 2003.Net is to some extend similar to the process
CST8152 Compilers Creating a C Language Console Project with Microsoft Visual Studio.Net 2003 The process of creating a project with Microsoft Visual Studio 2003.Net is to some extend similar to the process
CS240: Programming in C
 CS240: Programming in C Lecture 2: Hello World! Cristina Nita-Rotaru Lecture 2/ Fall 2013 1 Introducing C High-level programming language Developed between 1969 and 1973 by Dennis Ritchie at the Bell Labs
CS240: Programming in C Lecture 2: Hello World! Cristina Nita-Rotaru Lecture 2/ Fall 2013 1 Introducing C High-level programming language Developed between 1969 and 1973 by Dennis Ritchie at the Bell Labs
ROS Qt Creator Plug-in. Release
 ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 Users Help 13 3 Developers Help 17 4 Tutorials 19 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki explains the
ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 Users Help 13 3 Developers Help 17 4 Tutorials 19 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki explains the
HOW TO USE CODE::BLOCKS IDE FOR COMPUTER PROGRAMMING LABORATORY SESSIONS
 HOW TO USE CODE::BLOCKS IDE FOR COMPUTER PROGRAMMING LABORATORY SESSIONS INTRODUCTION A program written in a computer language, such as C/C++, is turned into executable using special translator software.
HOW TO USE CODE::BLOCKS IDE FOR COMPUTER PROGRAMMING LABORATORY SESSIONS INTRODUCTION A program written in a computer language, such as C/C++, is turned into executable using special translator software.
VikiLABS. July 8, 2017
 VikiLABS Installing and Setting-Up Eclipse IDE to run Your First FreeRTOS Project (on a Windows PC) www.vikipedialabs.com July 8, 2017 1 Installations 1. Download the latest version of FreeRTOS from http://www.freertos.
VikiLABS Installing and Setting-Up Eclipse IDE to run Your First FreeRTOS Project (on a Windows PC) www.vikipedialabs.com July 8, 2017 1 Installations 1. Download the latest version of FreeRTOS from http://www.freertos.
EE516: Embedded Software Project 1. Setting Up Environment for Projects
 EE516: Embedded Software Project 1. Setting Up Environment for Projects By Dong Jae Shin 2015. 09. 01. Contents Introduction to Projects of EE516 Tasks Setting Up Environment Virtual Machine Environment
EE516: Embedded Software Project 1. Setting Up Environment for Projects By Dong Jae Shin 2015. 09. 01. Contents Introduction to Projects of EE516 Tasks Setting Up Environment Virtual Machine Environment
Introduction to Linux. Woo-Yeong Jeong Computer Systems Laboratory Sungkyunkwan University
 Introduction to Linux Woo-Yeong Jeong (wooyeong@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu What is Linux? A Unix-like operating system of a computer What is an
Introduction to Linux Woo-Yeong Jeong (wooyeong@csl.skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu What is Linux? A Unix-like operating system of a computer What is an
Captronic 15. Robotic Middlewares
 Captronic 15 Robotic Middlewares 1 What is Robotic today? 2 + 3 Internet for robots Crowd sourcing Cloud Computing Network + of robots Distributed Intelligence 4 Industrial VS Service 5 Industrial VS Service
Captronic 15 Robotic Middlewares 1 What is Robotic today? 2 + 3 Internet for robots Crowd sourcing Cloud Computing Network + of robots Distributed Intelligence 4 Industrial VS Service 5 Industrial VS Service
BIL 104E Introduction to Scientific and Engineering Computing. Lecture 14
 BIL 104E Introduction to Scientific and Engineering Computing Lecture 14 Because each C program starts at its main() function, information is usually passed to the main() function via command-line arguments.
BIL 104E Introduction to Scientific and Engineering Computing Lecture 14 Because each C program starts at its main() function, information is usually passed to the main() function via command-line arguments.