Depth Camera for Mobile Devices
|
|
|
- Noah Eustace Lawrence
- 6 years ago
- Views:
Transcription
1 Depth Camera for Mobile Devices Instructor - Simon Lucey Designing Computer Vision Apps
2 Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera
3 Inferring 3D Points Given we have prior knowledge of the, Intrinsics parameters, { j } J j=1 Extrinsic parameters, { j, j } J j=1 Corresponding points, {x j } J j=1 Question is how to estimate the 3D point w?

4 Inferring 3D Points ŵ =min w JX j=1 {x j pinhole[w, j, j, j ]} e.g. {x} = x 2 2
5 Inferring 3D Points Optimization problem is inherently non-linear due to the pinhole camera function. Can be made linear using homogeneous coordinates.
6 Inferring 3D Points Write j-th out the pinhole camera in homogenous coordinates, Pre-multiply with inverse of the intrinsics matrix,
7 Inferring 3D Points Last equation gives, Substituting back into the other two equations, Re-arranging gives the following system of equations,
8 Inferring 3D Points Last equation gives, Substituting back into the other two equations, Re-arranging gives the following system of equations, What is the minimum number of cameras (J)?
9 Stereo Camera
10 Stereo Camera
11 Stereo Camera 6.35 cm


12 Stereo Camera 6.35 cm What is better wide or narrow baseline?

13 Stereo Camera


14 Stereo Camera
15 Amazon Fire Phone Examples in Mobile


16 Examples in Mobile Amazon Fire Phone Why 4 cameras?
17 Limitations - Texture Approach only works if an image patch has texture!! X A( x) = I(x k ) I(x k + x) 2 x k 2N (x) A( x) 12
 = I(x k ) I(x k + x) 2 x k 2N (x) 5 10 15 20 25 5 10 15 20 25 5 10 15 20 25 5")
18 Limitations - Texture Approach only works if an image patch has texture!! X A( x) = I(x k ) I(x k + x) 2 x k 2N (x) A( x) 12
19 Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera
20 Projector vs.camera 14
21 Projector vs.camera Camera 14
22 Projector vs. Camera 15
23 Projector vs. Camera Projector 15
24 Depth from Structured Light 16

25 Depth from Structured Light How can we get away with one camera? 16

26 Depth from Structure Light 17

27 Depth from Structured Light 18
 Second Region: Allows to obtain medium accurate depth surface aprox. (1.2 2.0 m).")
28 Prime Sense - Kinect 1.0 Camera How pattern looks like? First Region: Allows to obtain a high accurate depth surface for near objects aprox. ( m) Second Region: Allows to obtain medium accurate depth surface aprox. ( m). Third Region: Allows to obtain a low accurate depth surface in far objects aprox. ( m). 19


29 Examples in Mobile 20
30 ItSeez - App

31 ItSeez - App
32 Limitations - Range 22
 a checkerboard pattern is projected onto a scene using a DMD projector.")

33 Limitations - DeFocus November 6, 2015 DRAFT (a) Scene (b) Disparity Map Figure 1.2: Illumination Defocus: In (a) a checkerboard pattern is projected onto a scene using a DMD projector. The scene consists of three planar targets at distances of 60cm, 80cm and 120cm from the projector-camera system. The pattern is focused on the nearest plane. Due to the shallow depth of field, the pattern is poorly focused at other distances. Running structured light on this scene yields poor results (b) because of illumination defocus. The foreground of the scene is recontructed accurately because it is well focused, but the rest of the scene is reconstructed 23 poorly.
34 Limitations - Ambient Light A sunny day on Earth can reach up to 1120Wm -2 Tabletop projector releases on average 10W of light. Spectral Irradiance (in Wm 2 nm 1 ) Extraterrestrial Radiation Direct + Circumsolar Irradiance Wavelength (in nm) 24
35 Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera
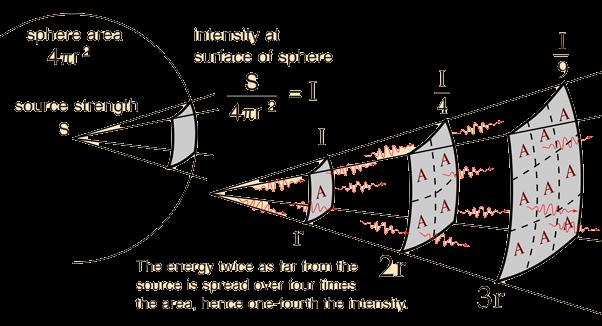
36 Time of Flight Cameras Light travels at approximately a constant speed c = 3x10 8 ms -1. Measuring the time it takes for light to travel over a distance once can infer distance. Can be categorized into two types:- 1. Direct TOF - switch laser on and off rapidly. 2. Indirect TOF - send out modulated light, then measure phase difference to infer depth.
37 Direct - TOF Light Detection And Ranging (LiDAR) probably best example in computer vision and robotics. High-energy light pulses limit influence of background illumination. However, difficulty to generate short light pulses with fast rise and fall times. High-accuracy time measurement required. Prone to motion blur. Expensive.

38 Direct - TOF Light Detection And Ranging (LiDAR) probably best example in computer vision and robotics. High-energy light pulses limit influence of background illumination. However, difficulty to generate short light pulses with fast rise and fall times. High-accuracy time measurement required. Prone to motion blur. Expensive.
39 Direct TOF - Zebedee CSIRO
40 Direct TOF - Zebedee CSIRO
41 Indirect - TOF Continuous light waves instead of short light pulses. Modulation in terms of frequency of sinusoidal waves. Detected wave after reflection has shifted phase. Phase shift proportional to distance from reflecting surface.... continuous wave MHz Emitter Detector Phase Meter phase shift 3D Surface

42 Indirect - TOF
43 Indirect TOF

44 Examples - Mobile

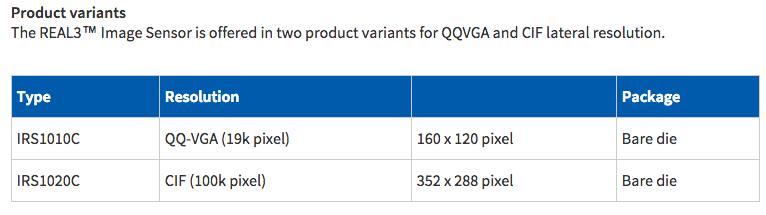
45 REAL3 TM Image Sensor
46 The Future

47 The Future
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Transformations between images Structure from Motion The Essential Matrix The Fundamental
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras
 Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Time-of-flight basics
 Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect
 A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Solid-State Hybrid LiDAR for Autonomous Driving Product Description
 Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy
 Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
2 Depth Camera Assessment
 2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.
![PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.](/thumbs/72/67823170.jpg "PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.") R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Fundamental Matrix & Structure from Motion
 Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
Fundamental Matrix & Structure from Motion Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Review of Assignment 0. Transformations between images Structure from Motion The Essential
Theory of Stereo vision system
 Theory of Stereo vision system Introduction Stereo vision is a technique aimed at extracting depth information of a scene from two camera images. Difference in pixel position in two image produces the
Theory of Stereo vision system Introduction Stereo vision is a technique aimed at extracting depth information of a scene from two camera images. Difference in pixel position in two image produces the
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 4 Vision Vision is the most important sense in humans and is becoming important also in robotics not expensive
ROBOTICS 01PEEQW DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 4 Vision Vision is the most important sense in humans and is becoming important also in robotics not expensive
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Basilio Bona DAUIN Politecnico di Torino
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces
 Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
TRANSIENT IMAGING. Freshman Imaging Project 2014
 1 TRANSIENT IMAGING Freshman Imaging Project 2014 2 Outline What is transient imaging? Previous work: MIT, UBC Possible applications of transient imaging Theory behind transient imaging Our goals Technology
1 TRANSIENT IMAGING Freshman Imaging Project 2014 2 Outline What is transient imaging? Previous work: MIT, UBC Possible applications of transient imaging Theory behind transient imaging Our goals Technology
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Time-of-Flight Imaging!
 Time-of-Flight Imaging Loren Schwarz, Nassir Navab 3D Computer Vision II Winter Term 2010 21.12.2010 Lecture Outline 1. Introduction and Motivation 2. Principles of ToF Imaging 3. Computer Vision with
Time-of-Flight Imaging Loren Schwarz, Nassir Navab 3D Computer Vision II Winter Term 2010 21.12.2010 Lecture Outline 1. Introduction and Motivation 2. Principles of ToF Imaging 3. Computer Vision with
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Studying Dynamic Scenes with Time of Flight Cameras
 Studying Dynamic Scenes with Time of Flight Cameras Norbert Pfeifer, Wilfried Karel Sajid Ghuffar, Camillo Ressl norbert.pfeifer@geo.tuwien.ac.at Research Group Photogrammetry Department for Geodesy and
Studying Dynamic Scenes with Time of Flight Cameras Norbert Pfeifer, Wilfried Karel Sajid Ghuffar, Camillo Ressl norbert.pfeifer@geo.tuwien.ac.at Research Group Photogrammetry Department for Geodesy and
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
3D Camera for a Cellular Phone. Deborah Cohen & Dani Voitsechov Supervisor : Raja Giryes 2010/11
 3D Camera for a Cellular Phone Deborah Cohen & Dani Voitsechov Supervisor : Raja Giryes 2010/11 1 Contents Why 3D? Project definition and goals Projective model of a structured light system Algorithm (3
3D Camera for a Cellular Phone Deborah Cohen & Dani Voitsechov Supervisor : Raja Giryes 2010/11 1 Contents Why 3D? Project definition and goals Projective model of a structured light system Algorithm (3
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Dynamic Reconstruction for Coded Aperture Imaging Draft Unpublished work please do not cite or distribute.
 Dynamic Reconstruction for Coded Aperture Imaging Draft 1.0.1 Berthold K.P. Horn 2007 September 30. Unpublished work please do not cite or distribute. The dynamic reconstruction technique makes it possible
Dynamic Reconstruction for Coded Aperture Imaging Draft 1.0.1 Berthold K.P. Horn 2007 September 30. Unpublished work please do not cite or distribute. The dynamic reconstruction technique makes it possible
Planar homographies. Can we reconstruct another view from one image? vgg/projects/singleview/
 Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Visual Pathways to the Brain
 Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor
 Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
A study of a multi-kinect system for human body scanning
 A study of a multi-kinect system for human body scanning A Seminar Report Submitted in partial fulfillment of requirements for the degree of Master of Technology by Shashwat Rohilla Roll No: 133050009
A study of a multi-kinect system for human body scanning A Seminar Report Submitted in partial fulfillment of requirements for the degree of Master of Technology by Shashwat Rohilla Roll No: 133050009
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD (301) (301) fax
 (301) fax") Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD 20723 (301) 953-6871 (301) 953-6670 fax Understand the instrument. Be able to convert measured counts/pixel on-orbit into
Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD 20723 (301) 953-6871 (301) 953-6670 fax Understand the instrument. Be able to convert measured counts/pixel on-orbit into
Starting this chapter
 Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS
 DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS By Chi Zhang A DISSERTATION Submitted to Michigan State University in partial fulfillment of the requirements for the degree of DOCTOR
DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS By Chi Zhang A DISSERTATION Submitted to Michigan State University in partial fulfillment of the requirements for the degree of DOCTOR
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
3D Shape and Indirect Appearance By Structured Light Transport. Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes
 3D Shape and Indirect Appearance By Structured Light Transport Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes Background - Indirect Light - Indirect light can be
3D Shape and Indirect Appearance By Structured Light Transport Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes Background - Indirect Light - Indirect light can be
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Direct Plane Tracking in Stereo Images for Mobile Navigation
 Direct Plane Tracking in Stereo Images for Mobile Navigation Jason Corso, Darius Burschka,Greg Hager Computational Interaction and Robotics Lab 1 Input: The Problem Stream of rectified stereo images, known
Direct Plane Tracking in Stereo Images for Mobile Navigation Jason Corso, Darius Burschka,Greg Hager Computational Interaction and Robotics Lab 1 Input: The Problem Stream of rectified stereo images, known
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature